
 ?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.
?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.ABSTRACT
Measurements of relaxation processes are essential in many fields, including nonlinear optics. Relaxation processes provide many insights into atomic/molecular structures and the kinetics and mechanisms of chemical reactions. For the analysis of these processes, the extraction of modes that are specific to the phenomenon of interest (normal modes) is unavoidable. In this study we propose a framework to systematically extract normal modes from the viewpoint of model selection with Bayesian inference. Our approach consists of a well-known method called sparsity-promoting dynamic mode decomposition, which decomposes a mixture of damped oscillations, and the Bayesian model selection framework. We numerically verify the performance of our proposed method by using coherent phonon signals of a bismuth polycrystal and virtual data as typical examples of relaxation processes. Our method succeeds in extracting the normal modes even from experimental data with strong backgrounds. Moreover, the selected set of modes is robust to observation noise, and our method can estimate the level of observation noise. From these observations, our method is applicable to normal mode analysis, especially for data with strong backgrounds.
GRAPHICAL ABSTRACT

CLASSIFICATION:
1. Introduction
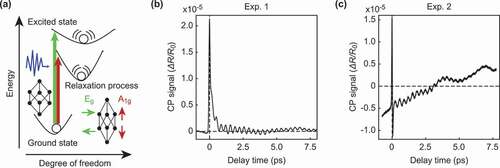
Figure 1. (a) Schematic diagram of coherent lattice vibrations in a (111)-Bi thin film generated by ultrashort optical pulses. In the (111)-Bi thin film, the coherent lattice vibrations corresponding to two different symmetric point groups of and
are observed by the pump-probe method. (b), (c) Signal data from lattice vibrations in the (111)-Bi thin film. The lattice vibrations start from the initial time 0. The signal contains two damped oscillations,
and
. We measured two experimental datasets, Exp. 1 in (b) and Exp. 2 in (c), at different times, so their backgrounds are different, but the signal contains the same damped oscillations.
Relaxation processes are processes by which a perturbed system returns to equilibrium. Measurements of relaxation processes are essential in many fields, such as condensed matter physics [Citation1,Citation2], nonlinear optics [Citation3], structural/reaction chemistry [Citation4], astronomy [Citation5] and atmospheric science [Citation6]. Such processes provide many insights into atomic/molecular structures and the kinetics and mechanisms of chemical reactions. For example, Kim et al. [Citation3] reported evidence of a Mott phase transition by analyzing the structure of a metal crystal from a coherent phonon (CP) signal, which is the relaxation of phonon vibrations. Blagg et al. [Citation7] recently reported the relaxation path and stable structure of the thermal magnetization of a lanthanide compound by analyzing X-ray diffraction patterns. Common to all these areas, the extraction of modes that are specific to the phenomenon of interest (normal modes) from the measured data is unavoidable.
In this study, we focus on the CP signal as a typical case in which the measurement data of a relaxation process include normal modes. Coherent phonons are waves of in-phase atomic vibrations over a macroscopic spatial range, and their signals can be observed by the pomp/probe method [Citation8,Citation9], which uses two ultrashort pulses of light. After the excitation of a substance by the pump pulse, lattice vibrations can be observed as oscillatory changes in optical constants with a delayed probe pulse; this approach has been used to reveal the dynamics of a photoinduced structural phase transition [Citation10–Citation12].
) shows an example of a (111)-Bi polycrystal as a reference sample [Citation13]. The (111)-Bi polycrystal has the and
coherent phonon modes. show typical observations of the CP signal in a (111)-Bi thin film with the same experimental conditions. The difficulty in analyzing the relaxation process represented by the CP signal is that the experimental artifacts and observation noise vary greatly from measurement to measurement. Some signals are relatively easy to analyze owing to the flat background, as shown in ), while others have strong backgrounds and are difficult to analyze, as shown in ). The purpose of CP signal analysis is to extract normal modes from such signals, despite the difficulty. Conventionally, Fourier analysis and wavelet analysis have been employed for CP signal analysis [Citation14–Citation18]. Despite their widespread use, these methods cannot uniquely separate the normal modes since they use trigonometric and wavelet bases, which cannot express damped oscillations.
To address the aforementioned issue, Murata et al. [Citation19] analyzed a CP signal using sparsity-promoting dynamic mode decomposition (SpDMD [Citation20]) based on the fact that CP signals consist of a few damped oscillation modes. SpDMD is a method that decomposes time series data into a sum of damped oscillations and observation noise. The authors isolated candidates of the normal modes from experimental artifacts and observation noise by assuming that the noise was stationary and did not drift over time. Specifically, the authors estimated the amplitude of the noise from the negative time domain () in ) since the signal was excited at
. However, the negative time domain of CP signals is not necessarily stationary, as shown in ) due to the instability of measurement instruments and lasers. The drift in such backgrounds has a significant influence on the extraction of normal modes.
In this study, we propose a data-driven framework to systematically extract normal modes, even when the background noise is unstable. The isolation of background noise and the extraction of normal modes from measured signals can be recast as a mode selection problem for CP signal estimation. We extend the previously proposed Bayesian LARS-OLS framework [Citation21,Citation22] to be used with SpDMD. Bayesian LARS-OLS is the mode selection framework from the viewpoint of data-driven approach in Bayesian inference. Bayesian LARS-OLS can analytically calculate the performance of a set of SpDMD modes in terms of the Bayesian free energy (FE) [Citation23], which assumes that the measured data can be decomposed into a sum of amplified oscillations and observation noise. We numerically compare the performance of our proposed method with that of the previous method proposed by Murata et al. [Citation19]. Our results consist of the following three points. First, our method succeeds in extracting normal modes from experimental data with strong backgrounds We then use virtual data to examine the effect of noise. The set of selected modes is robust to artificially induced observation noise. Moreover, our proposed method can estimate not only the normal modes but also the level of observation noise. From these observations, our method applies to both mode selection and noise estimation, even for a strong background. These results suggest that our proposed data-driven method is applicable to the relaxation process analysis of material science. Conventionally, a lines of studies conducted Fourier analysis on the relaxation process in material science [Citation1–Citation4]. Our method provides a new way to decompose normal modes by incorporating the physical properties of the relaxation process with Bayesian inference.
2. Method
In this section, we introduce a method to extract modes from observation signals of one-dimensional time series, as shown in . First, we introduce DMD [Citation24] in Section 2.1. Then, SpDMD [Citation20] is introduced in Section 2.2 as a method that can extract a normal mode expressing the lattice vibrations of a small (sparse) number of modes. Finally, we introduce a framework that extracts the normal mode from the mode extracted by Bayesian LARS-OLS [Citation22] by optimizing the sparse parameter in SpDMD even if the value of experimental noise is unknown in Section 2.3.
2.1. Dynamic mode decomposition
DMD is a method of extracting modes with damped or amplified vibrations from data [Citation24–Citation26]. DMD has been utilized in various fields of science and engineering, including fluid mechanics [Citation27], analyses of power systems [Citation28], epidemiology [Citation29], robotic control [Citation30], neuroscience [Citation31], image processing [Citation32], and nonlinear system identification [Citation33].
Figure 2. A method of creating a matrix for DMD from the CP signals.
CP signals are measured as one-dimensional time series with a uniform time interval
, where
is the number of data points. To apply DMD and extract modes from observation signals of one-dimensional time series
, we map the signals
to an
-dimensional vector as
where the -dimensional vector is called a state vector. We then obtain
snapshots with a fixed time interval
, as shown in , and define the
-th state vector
as the value at
. Assuming discrete linear dynamics between time
and
, we obtain
where . The objective is to estimate the matrix
from measured data that describe the discrete linear dynamical system. For this objective, we briefly explain the DMD algorithm according to Jovanović et al. [Citation20]. As shown in , we form two data matrices from the snapshot sequence
where . Using EquationEquation (2)
(2)
(2) , we obtain the following relationship between
and
:
The data matrix is a nonsquare matrix; there is no guarantee of regularity even in the case of a square matrix, so the inverse matrix
does not exist in general. We represent the matrix
that satisfies the above equation by using the Moore-Penrose pseudo-inverse matrix
. The best-fit linear operator
that satisfies EquationEquation 5
(5)
(5) is the solution to the following least-squares optimization:
Here, are matrices of a singular value decomposition (SVD):
. The eigenvalues and eigenvectors of the matrix
correspond to eigenvalues and eigenmodes of time evolution. The size of the matrix
is very large. To solve the eigenvalue problem efficiently, instead of the eigenvalue problem of the matrix
, we consider the low rank matrix
projected onto the singular vectors
. This SVD basis
is called the proper orthogonal decomposition (POD) [Citation34,Citation35].
Next, we computed the eigendecomposition of :
The diagonal matrix means the eigenvalues of
, which are same in
. The corresponding eigenvectors of
is represented the follows:
where is a matrix of
’s eigenvectors. Corresponding to DMD eigenvalues
, we called the columns
as DMD eigenmodes. Applying EquationEquation (2)
(2)
(2) repeatedly, the state vector
at step
from the initial vector
can be represented as
Here, we define as the mode amplitude, which corresponds to the coefficients of each mode. The vector corresponding to the eigenvalue is
.
We need to estimate from the data, which is the solution to an optimization problem. From the above expressions, the data matrix
can be represented as
Here, we define and a
Vandermonde matrix representing the latent structure in the temporal direction
The coefficient of each mode is expressed using the pseudo-inverse matrix
of the dynamic mode
. Here, we obtain
by solving the least squares problem.
represents the Frobenius norm of the matrix
.
is the objective function that needs to be minimized to obtain the mode amplitude
. In Appendix A, we present the correspondence between the DMD modes and the relaxation process.
2.2. Sparse estimation of DMD
We assume prior knowledge that the normal modes representing the lattice oscillations of a substance among modes extracted by DMD are few (sparse). We introduce SpDMD [Citation20] to obtain the sparse solution of the mode amplitude. SpDMD is a combination of DMD and the least absolute shrinkage and selection operator (Lasso) [Citation36], which automatically extracts a small number of components for the purpose of explaining data. We solve the following -regularized optimization problem.
Here, represents the weight of the
regularization term. If
takes a significant value,
becomes a more sparse solution. If SpDMD gives the regularization parameter
, we obtain a unique mode set.
2.3. Mode selection by Bayesian LARS-OLS
We deal with mode selection in Bayesian inference by considering the prior of . Although we optimized
with
regularization as shown in above, the
regularization develops a bias of the basis coefficient. In this section, we present a well-known technique for preventing the bias, called ‘polishing’ [Citation37], within the framework of Bayesian inference. Such framework is known as Bayesian LARS-OLS [Citation22] and we extend this framework to the mode selection problem in SpDMD. Bayesian LARS-OLS framework uses Bayesian free energy [Citation23] to evaluate the goodness of model fit. We can determine the optimal sparsity
and select the set of DMD modes based on the criteria. In Section 2.3.1, we first introduce the ‘polishing’ method. Next, in Section 2.3.2, we introduce the Bayesian LARS-OLS and Bayesian free energy (FE).
2.3.1. Polishing
We regress the mode amplitude again in terms of the candidate modes selected by SpDMD to prevent the bias of the coefficient. The technique is called ‘polishing’ [Citation36]. We deal with the ‘polishing’ in mathematics and introduce the prior of
condition in Bayesian inference by considering parameter
. We define an indicator
representing whether the modes is selected or not by SpDMD:
where is the index of the modes. In other words, the indicator
is the set of indices of which DMD mode was estimated as nonzero. We solve the constrained optimization problem of EquationEquation (17)
(17)
(17) using the set
with suffix
depending on the
regularization term
in SpDMD.
This equation means that we minimize under the constraint
, and
depends on
only through
.
2.3.2. Evaluation of decomposed modes
In this section, we deal with the aforementioned ‘polishing’ method in a Bayesian inference. The ‘polishing’ has two different purposes: mode search by regularization and regression. Least angle regression and ordinary least squares (LARS-OLS) [Citation37] is a framework of regression analysis that performs basis search and regression in a stepwise manner. Igarashi et al. considered the LARS-OLS as Bayesian inference (called Bayesian LARS-OLS) and proposed a method that achieves the basis search in the Bayesian free energy criterion [Citation21,Citation22]. We extend their method to be able to apply the material’s dynamics such as a relaxation process. In Bayesian LARS-OLS framework, we consider DMD as a problem of linear regression and express it by a probability model.
The model of DMD as described above can be written as where
is a matrix determined from the eigenvalues
and eigenvectors
of DMD. Please see Appendix B for the detail derivation. The optimization of
loss (EquationEquation 14
(14)
(14) ) for above linear model corresponds to the maximum likelihood estimation under the assumption that the observation noise is the independent and identically distributed (i.i.d.) Gaussian. Overall, we can write the DMD estimator as follows:
When we estimate the modes and sparsity
as
and
, we define a combination of modes as
. We note that
computes
through SpDMD by using
and
. To evaluate
, we consider a posterior distribution
. From the Bayesian theorem, the posterior is
Here, is constant. We define the prior distribution
to be uniform and use the following relationship:
Based on the above assumption (EquationEquation 18(18)
(18) ), the following holds:
. We assume that the matrix
, which characterizes modes, does not depend on the combination
, so we define
This equation means that the combination of modes does not change either the eigenvalue of the time evolution or the dynamic mode
, where
is the Dirac delta function. Substituting EquationEquation (21)
(21)
(21) into EquationEquation (20)
(20)
(20) , we obtain
Here, the is a prior probability and the
is a distribution of data generation. The
, called the marginal likelihood, represents the likelihood of the indicator
estimated from the data. The negative marginal log-likelihood,
is often referred to as the Bayesian free energy (FE) [Citation23]. The FE criterion evaluates the goodness of model fit. In our criteria, the indicator , which means whether the DMD mode was selected or not, determines the models and FE. The indicator
with the smallest FE represents the best basis set. To calculate FE analytically, we define the prior distribution
as follows in the cases of
and
.
Here, the coefficient is complex number, we define
as a complex Gaussian distribution [Citation38]. From the obtained FE
, we estimate the variance
of the noise and the variance
of the prior distribution as values that minimize the FE
. By repeatedly solving the self-consistent equations until convergence, the values of
and
that minimize the FE
are obtained. In this way, we can analytically calculate the FE. The reason why we can analytically calculate the FE
is that the parameter
of the DMD’s eigenvalues and eigenvectors has already been determined.
3. Results and discussion
We focus on experimental signals of a bismuth (Bi) thin film as typical examples of relaxation processes. We deposited a Bi thin film on a sapphire substrate with a thickness of 150 nm and used a reflective pump-probe spectroscopy method [Citation16] to obtain the CP signals. The signal background varied from measurement to measurement due to experimental instabilities. We analyzed two typical signals. One signal has a background close to steady-state, as shown in ), and the other signal has a strong background, as shown in ). In Sections 3.1 and 3.2, we explain the advantage of our proposed method. Finally, in Section 3.3, by using virtual data, we describe the robustness to noise and the noise estimation performance.
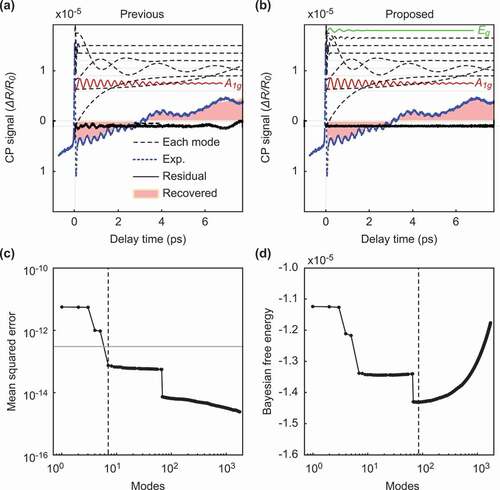
Figure 3. Comparison of our method and the previous method for data with a weak background. The figures on the left side show the result of the previous method, and the figures on the right side show the result of our method. (a-b): The intensity of the signals according to the delay time. The black dotted and solid lines show each selected mode and the residual signal between the original signal and the reconstructed signal, respectively. Among the selected modes, the normal modes and
are shown in red and green, respectively. The solid blue line shows the original experimental signal, and the pink filled area is the recovered signals with the selected mode. (c-d): The value of the metric used for the mode selection according to the number of modes. The previous method uses mean squared errors (MSEs) as the metric (c), and our method uses the Bayesian FE (d). The vertical dotted lines represent the point of the optimal number of modes selected by each method. The horizontal gray line in (c) shows the estimated variance of the noise.
3.1. Background close to steady-state
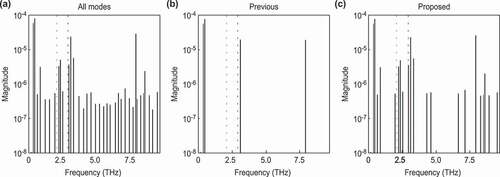
Figure 4. Frequencies of each decomposed mode for data with a weak background. The vertical axes represent the absolute values of the mode amplitudes, and the horizontal axes represent the mode frequencies. The red lines correspond to the frequency of , and the green lines correspond to the frequency of
. (a): All decomposed modes. (b): The modes selected by the previous method for the estimated noise. (c): The modes selected by our method for the Bayesian FE.
We analyzed the weak-background data in ). The experimental data had = 2433 data points from
= 0.00 to 8.00 ps at an interval of
= 8/2433 ps. The data matrices
and
were generated according to with
= 1000. We prepared the weight of the sparsity term
in EquationEquation (15)
(15)
(15) as 600 units with equal intervals on a log scale between
and
.
) shows the reconstruction of the original signal with the optimal modes selected by the previous method. As shown by the red and green lines in ), the previously proposed method successfully extracted the normal vibration modes and
. Moreover, the other selected modes are denoted by the black dotted lines and correspond to a weak background in the experimental data [Citation19]. By using the selected modes, the recovered signals coincide with the experimental data, as shown in the pink filled area and the blue line of ). The residual signal between the original signal and the reconstructed signal is close to zero, as shown by the solid bottom lines of ). In Murata et al. [Citation19], assuming prior knowledge that the normal modes representing lattice oscillations of the substance of interest were sparse, the authors selected the modes extracted by DMD as explained in Section 2.1. The previous method determined the optimal number of modes to be nine, where the curve of the MSE curve crosses the estimated noise variance
, as shown in ). Note that the authors estimated the noise variance from the variance of the negative time signal [Citation19]. On the other hand, the proposed method also succeeded in extracting the normal modes from the experimental data without using speculative noise information, as shown in ). In the proposed method, we estimated the noise variance in objective data using Bayesian inference and optimized the number of normal modes as
by minimizing the Bayesian FE, as shown in ). Our proposed method can obtain an estimate of the observed noise level from the Bayesian FE. We estimated that the standard deviation of the noise was
, while the value of the noise estimated in the previous study was
.
To qualitatively investigate the selected normal modes, we compare the results of a frequency spectrum analysis of the selected normal modes with the results of a previous study [Citation16]. Hase et al. [Citation16] reported that the two normal modes of (111)-Bi, and
, have frequencies of 2.91 and 2.07 THz, respectively. quantitatively shows the frequency of each mode, where the horizontal axis represents the frequency calculated from the eigenvalue of the extraction mode, and the vertical axis represents the absolute value of the mode amplitude. show the modes selected by the previous method [Citation19] and the proposed method, respectively, where both methods assumed that the original signal consisted of a few modes. The figures show that both methods successfully extracted the normal modes at 2.90 and 2.09 THz. These modes correspond well to
(2.91 THz) and
(2.07 THz), respectively.
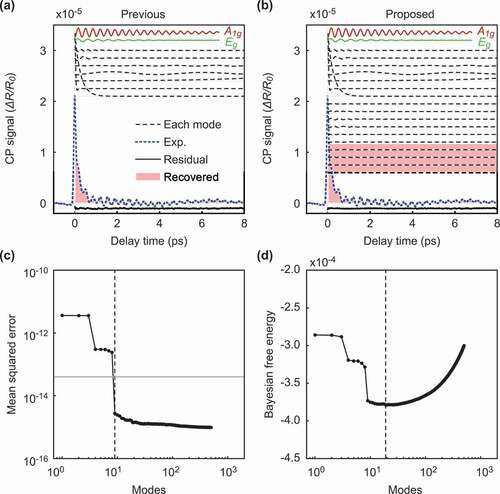
Figure 5. Comparison of our method and the previous method for data with a strong background. The figures on the left side show the result of the previous method, and the figures on the right side show the result of our method. (a-b): The intensity of the signals according to the delay time. (c-d): The value of the metric used for the mode selection according to the number of modes. The meaning of each color and line style is the same as in Fig. 3.
3.2. Strong background
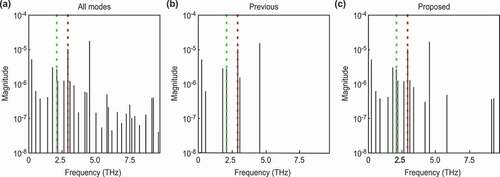
Figure 6. Frequencies of each decomposed mode for data with a strong background. The meaning of each color and line style conforms to that in.
In contrast to the previous section, the assumption regarding the noise estimation by Murata et al. [Citation19] does not hold when the data have a strong background, which can cause the normal mode selection to fail. Let us consider the strong-background case. The experimental data had = 9740 data points from
= 0.00 to 7.50 ps at an interval of
= 7.5/9740 ps. The data matrices
and
were generated according to with
. We prepared the weight of the sparsity term
in EquationEquation (15)
(15)
(15) as 600 units with equal intervals on a log scale between
and
.
and show the results for a strong background. The previous method determined seven modes as shown in ). Although the selected modes included the mode, they did not include the
mode. On the other hand, our method selected 85 modes, as shown in ), which successfully included both the
and
modes. Our method also has an advantage in terms of the residuals, as shown by the solid black line in ). The residual signal extracted by our method is steady, whereas the previous method includes a vibration component in the residual signal.
As in , we performed a frequency spectrum analysis of each mode to quantitatively evaluate the difference from the normal modes obtained in a previous study [Citation16] and to ensure that normal modes can be extracted quantitatively (). As in , ) shows the modes extracted from DMD, and show the modes selected by the previous method [Citation19] and the proposed method, respectively. ) shows that the previous method successfully extracted the mode at 2.96 THz, which corresponds to the (2.91 THz) mode band; however, it failed to extract the
(2.07 THz) mode band. On the other hand, ) shows that the proposed method successfully extracted the normal modes at
, and 2.34 THz. These modes correspond to the
(
THz) and the
(
THz) modes bands, respectively. The estimated errors were
and
THz, respectively. This latter error seemed to be influenced by the intense fluctuating background components. To decompose such phonon modes, which have a weak amplitude and short decay time, we should improve the experimental conditions to reduce such experimental artifacts.
Let us consider the noise estimation results. We estimated that the standard deviation of the noise was , while the value of the noise estimated in the previous research was
. In both the strong- and weak-background data,
is approximately six times larger than
. The error of the noise estimation has a critical effect on the normal mode selection in the data with a strong background. The previous method failed to select the
mode, because the noise level estimated by the previous method was larger than the noise level estimated by the proposed method. Because the amplitude of the
mode was smaller than the
mode, it was considered that the
mode deviated from the selected mode. However, since our method estimates noise without a stationary assumption for an experimental artifact, we succeeded in selecting normal modes with small amplitudes. Our method is effective, especially for data with a strong background. By applying our method to CP analysis, we can select normal modes from measurement signals without considering the experimental situation. Since the normal modes were known for (111)-Bi, it was possible to find normal modes from candidates of selected modes obtained by mode selection.
3.3. Virtual CP data
Figure 7. Results of the mode selection of 100 virtual CP signals. The box plots show the number of selected modes for the previous method (left) and the proposed method (right). The horizontal red line shows the correct number of modes: nine.
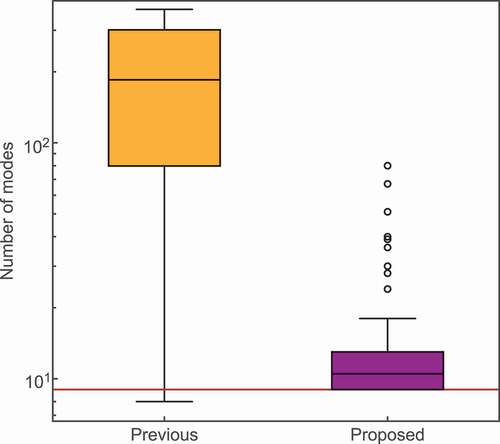
Finally, we investigate the performance of the previous method and the proposed method against virtual CP data to evaluate the effect of noise. Let us consider the results of the virtual CP data. We created virtual data by injecting Gaussian noise () into the reconstructed signal from nine modes chosen by the previous method in the weak-background ()). We prepared 100 virtual datasets with different samples of noise.
shows the number of selected modes. We plotted the distributions of counts as a box plot. The previous method selected modes, while our method selected
modes. We note that the number of modes selected by proposed method was always greater than the correct number of modes of nine. Since there is no negative time domain in the generated virtual data, the noise level used to determine the mode in the previous method was the generated noise level (
). In the result of the previous method, the selected numbers varied considerably according to the noise, and the mode number tended to be much larger than the correct number of modes. On the other hand, our method has minimal dispersion and can select a number that is closer to the correct mode number from noisy data. These results show that our method is much more robust to noise than the previous method.
Let us consider the noise estimation results. The estimated noise level by the FE was . Since the true noise level is
, our method can estimate the amplitude of the original noise from an observed signal whose noise value is unknown. This result indicates that it is possible to quantitatively evaluate the amplitude of the noise without using a heuristic technique.
4. Conclusions
In this study, we extended Bayesian LARS-OLS to be used in SpDMD for the selection of normal modes in a relaxation process. We numerically compared the performance of our proposed method to the previous method proposed by Murata et al. [Citation19]. The following three results showed the effectiveness of the proposed method based on data of the CP signal of a (111)-Bi thin film. First, our method succeeded in extracting a small number of modes, including the normal modes, from experimental data even with significant background trends. Then, we used virtual data to examine the effect of noise. The selected set of modes was more robust to observation noise than the conventional method. Finally, our proposed method allowed to estimate not only normal modes but also the level of observation noise quantitatively. From these observations, our proposed method is applicable to normal mode analysis of relaxation processes, especially for data with strong backgrounds, which broadens the applicability of data-driven approach in analyzing of relaxation phenomena in material science.
Disclosure statement
No potential conflict of interest was reported by the authors.
Additional information
Funding
References
- Casalini R, Roland CM. Aging of the secondary relaxation to probe structural relaxation in the glassy state. Phys Rev Lett. 2009 Jan;102(3):035701. ISSN 0031-9007.
- Case DA. Molecular dynamics and NMR spin relaxation in proteins. Acc Chem Res. 2002 Jun;35(6):325–331. ISSN 0001-4842.
- Kim H-T, Lee YW, Kim B-J, et al. Monoclinic and correlated metal phase in VO 2 as evidence of the mott transition: coherent phonon analysis. Phys Rev Lett. 2006 Dec;97(26):266401. ISSN 0031-9007.
- Voth GA, Hochstrasser RM. Transition state dynamics and relaxation processes in solutions: a frontier of physical chemistry. J Phys Chem. 1996 Jan;100(31):13034–13049. ISSN 0022-3654.
- D’Ercole A, Vesperini E, D’Antona F, et al. Formation and dynamical evolution of multiple stellar generations in globular clusters. Mon Not R Astron Soc. 2008 Dec;391(2):825–843. ISSN 00358711.
- Salma I, Ocskay R, Varga I, et al. Surface tension of atmospheric humic-like substances in connection with relaxation, dilution, and solution pH. J Geophys Res Atmos. 2006 Dec;111(D23):n/a–n/a. ISSN 01480227.
- Blagg RJ, Ungur L, Tuna F, et al. Magnetic relaxation pathways in lanthanide single-molecule magnets. Nat Chem. 2013 Aug;5(8):673–678. ISSN 1755-4330.
- Rosker MJ, Wise FW, Tang CL. Femtosecond relaxation dynamics of large molecules. Phys Rev Lett. 1986 Jul;57:321–324.
- Cheng TK, Brorson SD, Kazeroonian AS, et al. Impulsive excitation of coherent phonons observed in reflection in bismuth and antimony. Appl Phys Lett. 1990;57(10):1004–1006.
- Dumitric T, Garcia ME, Jeschke HO, et al. Selective cap opening in carbon nanotubes driven by laser-induced coherent phonons. Phys Rev Lett. 2004 Mar;92(11):117401. ISSN 0031-9007.
- Iwai S, Okamoto H. Ultrafast phase control in one-dimensional correlated electron systems. J Phys Soc Jpn. 2006;75(1):011007.
- Wall S, Wegkamp D, Foglia L, et al. Ultrafast changes in lattice symmetry probed by coherent phonons. Nat Commun. 2012 Mar;3:721.
- Madelung O. Semiconductors: data handbook. Berlin, Heidelberg: Springer Berlin Heidelberg; 2004. ISBN 978-3-642-62332-5.
- Mizoguchi K, Morishita R, Oohata G. Generation of coherent phonons in a CdTe single crystal using an ultrafast two-phonon laser-excitation process. Phys Rev Lett. 2013 Feb;110:077402.
- Hase M, Mizoguchi K, Harima H, et al. Optical control of coherent optical phonons in bismuth films. Appl Phys Lett. 1996 Oct;69(17):2474–2476. ISSN 0003-6951.
- Hase M, Kitajima M, Nakashima S, et al. Dynamics of coherent anharmonic phonons in bismuth using high density photoexcitation. Phys Rev Lett. 2002 Jan;88(6):067401. ISSN 0031-9007.
- Hase M, Kitajima M, Constantinescu AM, et al. The birth of a quasiparticle in silicon observed in timefrequency space. Nature. 2003 Nov;426(6962):51–54. ISSN 0028-0836.
- Yoshino S, Oohata G, Mizoguchi K. Dynamical fano-like interference between rabi oscillations and coherent phonons in a semiconductor microcavity system. Phys Rev Lett. 2015 Oct;115(15):157402. ISSN 0031-9007.
- Murata S, Aihara S, Tokuda S, et al. Analysis of coherent phonon signals by sparsity-promoting dynamic mode decomposition. J Phys Soc Jpn. 2018;87(5):054003.
- Jovanovi MR, Schmid PJ, Nichols JW. Sparsity-promoting dynamic mode decomposition. Phys Fluids. 2014;26(2):024103.
- Igarashi Y, Takenaka H, Nakanishi-Ohno Y, et al. Exhaustive search for sparse variable selection in linear regression. J Phys Soc Jpn. 2018 Apr;87(4):044802. ISSN 0031-9015.
- Mototake Y, Igarashi Y, Takenaka H, et al. Spectral deconvolution through Bayesian LARS-OLS. J Phys Soc Jpn. 2018;87(11):114004.
- Watanabe S. Mathematical theory of Bayesian statistics. CRC Press; 2018. ISBN 1315355698.
- Schmid PJ. Dynamic mode decomposition of numerical and experimental data. J Fluid Mech. 2010;656:528.
- Kutz JN, Brunton SL, Brunton BW, et al. Dynamic mode decomposition - data-driven modeling of complex systems. SIAM. 2016. ISBN 978-1-611-97449-2.
- Rowley CW, Mezi I, Bagheri S, et al. Spectral analysis of nonlinear flows. J Fluid Mech. 2009 Dec;641:115–127. ISSN 00221120.
- Schmid PJ, Li L, Juniper MP, et al. Applications of the dynamic mode decomposition. Theor Comp Fluid Dyn. 2011 Jun;25(1–4):249–259. ISSN 0935-4964.
- Susuki Y, Mezic I. Nonlinear koopman modes and power system stability assessment without models. IEEE Trans Power Syst. 2014 Mar;29(2):899–907. ISSN 0885-8950.
- Proctor JL, Eckhoff PA. Discovering dynamic patterns from infectious disease data using dynamic mode decomposition. Int Health. 2015 mar;7(2):139–145. ISSN 1876-3405.
- Berger E, Sastuba M, Vogt D, et al. Estimation of perturbations in robotic behavior using dynamic mode decomposition. Adv Rob. 2017;29(5):331–343.
- Brunton BW, Johnson LA, Ojemann JG, et al. Extracting spatialtemporal coherent patterns in large-scale neural recordings using dynamic mode decomposition. J Neurosci Methods. 2016 Jan;258:1–15. ISSN 0165-0270.
- Kutz JN, Fu X, Brunton SL. Multiresolution dynamic mode decomposition. SIAM J App Dyn Syst. 2016 Jan;15(2):713–735. ISSN 1536-0040.
- Mauroy A, Goncalves J. Linear identification of nonlinear systems: a lifting technique based on the Koopman operator. 2016 IEEE 55th Conference on Decision and Control (CDC); 2016 Dec; IEEE; p. 6500–6505. ISBN 978-1-5090-1837-6..
- Lumley JL. Stochastic tools in turbulence. Dover Publications; 2007. ISBN 0486462706.
- Sirovich L. Turbulence and the dynamics of coherent structures part I: coherent structures. Q Appl Math. 1987;XLV(3):561–571. ISSN 0033-569X.
- Tibshirani R. Regression shrinkage and selection via the lasso. J R Stat Soc Series B Stat Methodol. 1996;58(1): 267–288. ISSN 00359246.
- Efron B, Hastie T, Johnstone I, et al. Least angle regression. Ann Statist. 2004 Apr;32(2):407–499.
- Takeishi N, Kawahara. Y, Tabei Y, et al. Bayesian dynamic mode decomposition. Proceedings of the Twenty-Sixth International Joint Conference on Artificial Intelligence, IJCAI-17; 2017; Melbourne. p. 2814–2821.
Appendix A.
Correspondence between the DMD basis and the form of damped oscillations
This chapter explains how the form of the damped oscillations representing the relaxation process can be expressed using the DMD basis. The time evolution of the DMD basis is in the (12) expression Here, when we converted each eigenvalue
of DMD into
in the complex polar coordinate system, each element
of
becomes
.
Assuming that the initial time of the time series data is and that the time interval
is constant, the relationship between the time step
and the time
is
. Now,
is expressed using
as follows
where is
We rewrite this equation in the form of damped oscillation as follows
Then, and
are
is the damping time constant and
is the frequency. Thus, the (10) formula can be rewritten in terms of time evolution from a discrete form to a continuous form as follows
where is
Eq. (A4) contains a term for damping where
and a term for vibration where
. Each decomposed form is as follows
where is the sum of elements for which
, and
is the sum of elements for which
.
is observation data and contains only real components as follows.
where . Since only the real component is obtained by discarding the pure imaginary component, the degree of freedom of the complex conjugate remains. As a result, the vibration mode of
is obtained by two modes of the same value in the space of only real numbers.
Appendix B.
Transformation to original signal shape
In this chapter, we explain the operation to restore the data matrix obtained by SpDMD to the original one-dimensional time series signal. From the result of (1), the original signal data can be expressed as follows
Here, is a column vector which is a pair of state vectors
of DMD introduced for the reconstruction of the original time series and can be expressed using
and as
Therefore, it becomes . The next thing to do is to display matrix with
. By using
corresponds to
,
corresponds to
. Eventually, it becomes
Here, we note