
 ?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.
?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.ABSTRACT
The goal of this study was to compare wheel-rut development between a conventional 8-wheel forwarder and a 10-wheel forwarder. Two Ponsse Buffalo forwarders with 14 metric ton load capacity were compared; one with a standard double-bogie undercarriage and one with double-bogies plus an auxiliary back axle. Both forwarders were equipped with bogie-tracks front and back; the 8-wheeler with standard traction tracks on the rear bogie, the 10-wheeler with combi-tracks. The comparison was set up with two parallel forwarding trails leading down from the landing over marine sediments (coarse sand) to four parallel strip roads over a 4 m deep bog. Seven blocks with three transects per block were laid out to follow the breakdown of the harvest residue layer (above the humus surface) and development of rut depth (below the humus surface) after each loaded pass. Ruts deeper than 10 cm were found on 19% and 31% of transects after 5–10 and 15–20 passes for the 8-wheel forwarder, respectively. The corresponding figures for the 10-wheel forwarder were 7% and 12%, respectively. Using linear regression, 79% of the variation in rut depth could be explained by pass interval, forwarder type, and pre-harvest soil moisture content. The auxiliary axle with suitable bogie-tracks offers increased site availability in moderate terrain during frost-free periods.
Introduction
For the Nordic countries, snow and frost-free winters pose challenges to maintaining even capacity utilization for harvesting contractors and stable wood supply for forest industries. Harvesting sensitive sites during periods of low bearing capacity require repair of the excessive rutting to maintain certification standards in Norway’s farm forestry. Typical costs for rut repair can range from 5 up to 15 NOK/m3 (Østby-Berntsen and Fjeld Citation2018). These costs are equivalent to 5–10% of harvesting costs to roadside.
Figure 1. The Ponsse Buffalo 10-wheeled forwarder used in the field test (photo R. Dalen) showing a standard track on the front bogie and a combi-track on the rear bogie. The auxiliary axle is seen behind the rear bogie and has variable axle pressure when in use

Depending on terrain, soil, and weather conditions, driving factors for rutting can include both ground pressure and traction shearing forces. Since the arrival of the first forwarders, the historical development of axle numbers, wheel, and track widths have aimed to maintain an efficient balance between ground pressure and traction (Drushka and Konttinen Citation1997; Öhman Citation2013; Nordfjell et al. Citation2019). Compared to the initial 4-wheeled forwarders, 6-wheeled forwarders with a rear-bogie under the load frame were a welcome addition, as were the later 8-wheeled forwarders with a front bogie (Seixas and McDonald Citation1997). In Norway, many harvesting sites have forwarding distances in excess of 1000 m through varying terrain (Samset Citation1974). Under these conditions robust high-capacity forwarders are preferred and 8-wheelers dominate, typically equipped with chains on the front bogie and traction tracks on the back bogie (Østby-Berntsen and Fjeld Citation2018). However, a significant portion of the most productive forest area is also located on moist marine-sediment sites which are difficult to access except during sustained sub-zero temperatures or warm, dry periods (Fjeld et al. Citation2018). The 10-wheeled forwarder provides a further increase of contact area and potentially increased availability for such sites.
General calculation models for forestry machine ground pressure is covered in earlier sources such as RTG (Citation1969), Malmberg (Citation1981) or Gigler (Citation1992). Forest machine studies on this topic continue, particularly focusing on the search for less damaging undercarriages (Kärha and Poikela Citation2010; Edlund Citation2012; Wästerlund & Bygden Citation2016; Björheden Citation2018). Historically, the operational basis for seasonal availability was the development of terrain classification systems such as Berg (Citation1992). Later years have seen improved use of methods for soil moisture modeling (Ågren et al. Citation2014) and direct measurement of soil bearing capacity (Klvac et al. Citation2010). These developments provide the basis for more dynamic planning practices in the future (Eliasson and Wästerlund Citation2007; Willén et al. Citation2017).
The goal of this study was therefore to compare rut development between a conventional 8-wheel forwarder with traction bogie-tracks and a 10-wheel forwarder with combi-tracks on soft forest ground conditions during typical summer/autumn conditions.
Materials and methods
Two Ponsse Buffalo forwarders with 14 t load capacity were compared; one with a standard double-bogie undercarriage (8-wheel) and one with a double-bogie undercarriage with an auxiliary axle behind the rear bogie (10-wheel) . The standard unloaded weight of the 8-wheeled Buffalo is 19.8 tons. Another ongoing study (Björheden Citation2018) measured the unloaded weights for the 8- and 10-wheeler with tracks as 22.7 and 25.2 tons, respectively. The auxiliary axle on the 10-wheel forwarder is hydraulically lifted and lowered with variable axle pressure when in use. Both machines were equipped with 710 mm wide Trelleborg Twin forestry tires. The 8-wheeler had universal tracks on the front bogie (Pewag Bluetrack Duro, wide-rib) and traction tracks on the rear bogie (Olofsfors OF, narrow-rib) for more difficult terrain. The 10-wheeler had all-round tracks on the front bogie (Olofsfors Kovax-Soft, M-rib) and combi-tracks (Olofsfors Max-Magnum with alternating M-plates and narrow-ribs) on the rear bogie. Based on the contractor’s experience from an earlier 10-wheeler, non-pneumatic tires were used on the auxiliary axle to avoid punctures along the rim edge.
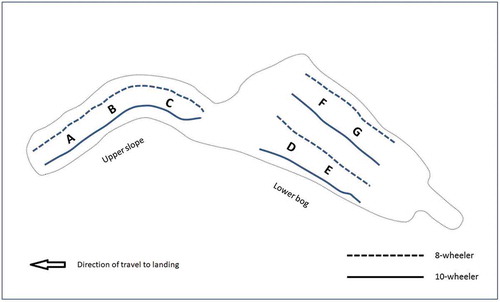
A side-by-side comparison of the two forwarders was set up with two parallel forwarding trails (250-m length) leading down from the landing over marine sediments (coarse sand covered by 10–15 cm raw humus layer) on an undulating slope (0–10% inclination) to a lower bog. These led to four parallel strip roads (200-m length) over the lower bog (4-m deep). The harvester used 50% wider cutting zones on the bog to provide a sufficient reinforcement of the trails with harvest residues. The forwarder load stakes were marked at heights specifying a 12-m3 load, due to the low bearing capacity of the bog.
The upper slope and lower bog were divided into seven blocks of roughly similar operating conditions (). Three transects were laid out systematically per block, intersecting both forwarders’ trails to mark measuring points for the compression of the harvest residue layer (while still above the humus surface) and development of rut depth (after compression below the humus surface). Measurements were made in each wheel track after each pass for both forwarders. Pre-harvest ground conditions for each block were measured on the transect midpoints (three measurements per transect, ). These measurements included stone quota (percent of soil probes stopped by a larger stones in the first 20 cm), maximum soil probe depth (between larger stones), penetrometer resistance (for three intervals: 0–10 cm, 11–20 cm, and 21–30 cm below the humus) and soil moisture content (volumetric percent at 10, 20 and 30 cm below the humus layer). The soil probe had a diameter of 1.4 cm and a maximum penetration of 70 cm. The cone penetrometer resistance provides a measure of soil strength and was registered with an Eijkelkamp hand penetrometer (2 cm2 cone) at 2 cm/s feed rate.
Table 1. Pre-harvest ground conditions per block (n = 9 per block with 3 transects per block with 3 measurements per transect)
Figure 2. Layout of forwarding trails (dashed: 8-wheeler, solid: 10-wheeler) from upper slope (blocks A–C over 250 m) to lower bog (blocks D–E and F–G over 200 m). Three transects intersected both forwarding trails per block, perpendicular to the direction of travel, where rut measurements were made in each wheel track
The remaining residue mat thickness or rut depth was measured in the mid-point of each wheel track for each forwarder after each loaded pass using conventional aluminum measurement frames (140/160 cm wide base for 8 and 10-wheeler, respectively). The residue thickness (positive distance above the humus layer) or rut depth (negative distance below the humus layer) were measured to the nearest cm. Different frame widths were used to ensure the same distance from the outer edge of the respective bogie-belts (20 cm wider belts for the 10-wheel forwarder).
The study was run as a regular forwarding operation, where each loaded pass represents one unloaded pass down from the landing and one loaded back toward the landing. Two field workers made the rut measurements after each transect was passed with the stipulated full load (12 m3). The number of passes was therefore highest for the blocks closest to the landing (A–C) and lowest for the blocks farthest from the landing (D–G). The study design aimed to provide roughly 25 loaded passes per forwarder. The volume available for each forwarder provided 510 and 612 rut measurements for the 8-and 10-wheeler, respectively.
The analysis was preceded by an initial overview of harvest residue mat coverage after the first pass to check comparability per block and forwarder. Thereafter, the results were modeled in two steps. The first step examined the frequency of transects where the residue mat was pressed below the humus level. The second step concerned only transects where the mat was pressed below the humus, and modeled the development of rut depth with multiple linear regression. Statistical presentations and regression analysis were done in MiniTab v17.
Results
The initial overview of residue mat thickness after the first pass showed an unequal coverage between forwarders on two blocks (; lower coverage for the 8-wheeler in blocks F and G). Both of these blocks were excluded from further analysis. For the remaining data, ruts deeper than 10 cm were found on 19% and 31% of transects after 5–10 and 15–20 passes for the 8-wheeler. The corresponding figures for the 10-wheeler were 7% and 12%. Regarding ruts deeper than 20 cm, these were found on 3% and 6% of transects after 10 and 20 passes for the 8-wheeler. The corresponding figures for the 10-wheeler were 0% and 0%.
Figure 3. The frequency (%) of initial measurements per block (A–G) with a harvest residue mat on the forwarding trail (0: no residue mat over the humus level, 1: residue mat over the humus level) after one pass with the 8-wheeled forwarder (left) and 10-wheeled forwarder (right)
Given the thickness of the harvest residues on the forwarding trail there was considerable error between individual measurements of rut depths. Average values per transect for 5-pass intervals (0–5, 6–10, 11–15, 16–20, and 21–25) were therefore used for further analysis of rut depth development. A simple plot of the average rut depths per loaded pass number is shown below ().
Figure 4. Plot of average rut depth (cm on y-axis) with increasing number of passes (x-axis) for the 8-wheel and 10-wheel forwarders. The values presented are the averages per 5-pass interval
Using linear regression, 79% of the variation between transects presented in (n = 32) could be explained by 4 coefficients (EquationEq. 1(1)
(1) ): a) the intercept, b) pass interval, c) interaction between pass number and forwarder and d) interaction between pass number, forwarder type, and pre-harvest soil moisture content. All coefficients were statistically significant at a 5% level (p < 0.05).
Where:
RUT: average rut level in relation to humus layer (interval −1 to −30 cm)
PASS: average number of loaded passes per pass interval (0–5, 6–10, 11–15, 16–20, 21–25)
FORW: forwarder type (0, 1 for 10- and 8-wheeler, respectively)
VMC: average pre-harvest volumetric moisture content (%)
Two different rut measurement frames were used for the study (1.4 m for 8-wheeler with wheel-width belts, 1.6 m for the 10-wheeler with 20 cm wider tracks). Control measurements were made with both rut measurement frames after the operation was complete (seven blocks with three transects per block and two ruts per transect giving 84 paired comparisons). For transects with a harvest residue mat still above the humus level (7.2 cm on average, n = 34) the 1.6 m frame gave an average mat thickness 0.6 cm thicker than given by the 1.4 m frame. For transects with ruts below the humus level (−6.9 cm on average, n = 47) the 1.6 frame gave an average rut depth 0.3 cm shallower than given by the 1.4 m frame.
Discussion
Öhman (Citation2013) reviewed the historical development of ground pressures for 4-, 6-, and 8-wheel forwarders of different load size classes. The development of 10-wheel forwarders is a logical continuation of this development trend. The results of the field study confirm the results which were to be expected given the increased contact area enabled by the longer and wider rear bogie-track for the auxiliary axle. The extra-wide harvester swaths provided the increased reinforcement of forwarder trails which are necessary for accessing the lower bog. The total volume transported per forwarder during the study was approx. 300 m3, less than half the volume now typically harvested in a Norwegian farm harvesting operation (600–800 m3). The limited volume still enabled roughly 25 passes per forwarder, partially due to the reduced load volume (12 m3). The field study gave good opportunity to observe the dynamics of the respective undercarriages. A simple observation is that the single-ribbed bogie-tracks under the 8-wheeler’s load quickly broke down the structure of the residue mat, puncturing the humus- and root mat where harvest residues were thin. In contrast, the auxiliary axle extending the rear track length of the 10-wheeled forwarder reduced the vertical amplitude of the rear bogie, better bridging short stretches of limited residues.
Because of the higher number of complete loads transported over the main forwarder trail closest to the landing (blocks A–C), the rut depths for the highest number of passes in more reflect the drier conditions and higher soil strengths in these blocks (). However, even with the limited rutting observed, the regression analysis of depth development with pass interval (EquationEq. 1(1)
(1) ) shows an increased effect of an auxiliary axle on rut reduction with increasing soil moisture and reduced soil strength. A correspondingly reduced effect of the auxiliary axle on rutting for stronger soil types follows the same logic. For the regression analysis, the use of average values for the noted pass intervals (1–5, 6–10, 11–15, etc.) provided a more stable estimate of rut depth. This proved to be a useful approach when dealing with high measurement error when working with thick residue mats on soft ground. This approach, however, failed to capture the initial surface compression associated with the first few loads (see ). Other studies have compared undercarriages for the same prime mover on agricultural fields (Björheden Citation2018). A common observation from both ongoing studies and the contractor’s practical experience is that the auxiliary axle on the 10-wheeler should be lifted while turning due to the higher shearing forces of the longer bogie-tracks in a curve.
The empirical results of this field test can be compared to the results provides by a rut prediction simulator using the specifications of the respective machines (Fjeld and Østby-Berntsen Citation2017; Fjeld et al. Citation2018; Østby-Berntsen and Fjeld Citation2018). In this field test, the relative reduction of rutting with the 10-wheeler was greater than the calculated relative increase in contact area and corresponding reduction of ground-pressure provided by the longer and wider bogie-tracks. In this context, there are differences between underlying formulas for ground-pressure calculations for bogie-tracks (e.g. RTG Citation1969 versus Malmberg Citation1981). However, these primarily concern how assumed sinkage contributes to the effective increase in track length and does not take into consideration the differences between traction ribs and floatation plates used on the respective bogie-tracks. It is more probable that the deviation between the field study results and corresponding theoretical calculations can be attributed to the type of bogie-track used on the respective forwarders. The narrower more aggressive traction ribs used on the 8-wheel forwarder are used on steeper conditions typical for Norwegian operations. In contrast, the wider plates used on the 10-wheeler are only suited to the less challenging topography of flatter sensitive sites. For future studies, it would be useful to further examine the interacting effects of axle configuration and bogie-track types on combinations of soil strengths and harvest residue matting.
In summary, the auxiliary axle matched with a suitable bogie-track served as an effective aid when passing sections of marginal bearing capacity. Given suitable harvest residue matting, it reduced the initial risk of breaking through the peatland root mat and subsequent rut development.
Disclosure statement
No potential conflict of interest was reported by the authors.
References
- Ågren A, Lidberg W, Strömgren M, Ogilvie J. 2014. Evaluating digital terrain indices for soil wetness mapping – a Swedish case study. Hydrol Earth Sys Sci. 18(9):3623–3634. doi:10.5194/hess-18-3623-2014.
- Berg S. 1992. Terrain classification system for forestry work. Kista: Forest Operations Institute of Sweden.
- Berg S, Mohtashami S, Bergqvist I, Löfgren B 2011. Soft logging: avoiding damage to the soil. Proceedings FORMEC 2011. Graz, Austria
- Björheden R. 2018. Rutting and vibration levels of the On Track concept forwarder on standardized test tracks. Uppsala, Sweden. “Arbetsrapport; Nr. 989, 2018” (28 pp).
- Bygdén G, Eliasson L, Wästerlund I. 2003. Rut depth, soil compaction and rolling resistance when using bogie tracks. Journal of Terramechanics. 40(3):179–190. doi:10.1016/j.jterra.2003.12.001.
- Drushka K, Konttinen H. 1997. Tracks in the forest. Belmont: Timberjack group.
- Edlund J 2012. Harvesting in the boreal forest on soft ground. Ways to reduce ground damage. [Licentiate thesis]. Swedish University of Agricultural Sciences.
- Eliasson L, Wästerlund I. 2007. Effects of slash reinforcement of strip roads on rutting and soil compaction on a moist fine-grained soil. For Ecol Manage. 252(1–3):118–123. doi:10.1016/j.foreco.2007.06.037.
- Fjeld D, Bjerketvedt J, Fønhus M. 2018. Nye muligheter for klassifisering av bæreevne. New possibilities for classification of bearing capacity. Norsk Skogbruk. 4:45–47.
- Fjeld D, Østby-Berntsen Ø. 2017. Ti-hjuls lassbærer – bra løsning for bæresvak mark? Ten-wheeled forwarder – a suitable solution? Norsk Skogbruk. 10:47–48.
- Gigler JK 1992. Design of a simulation model for the prediction of ground pressure under tracked vehicles [Dissertation]. University College Dublin.
- Kärha K, Poikela A 2010. Harvesting wood from spruce swamp stand during summer. Proceedings OSCAR 2010; Honne, Norway.
- Klvac R, Vrana P, Jirousek R. 2010. Possibilities of using the portable falling weight deflectometer to measure the bearing capacity and compaction of forest soils. J for Sci. 56(3):130–136. doi:10.17221/71/2009-JFS.
- Malmberg C-E. 1981. Terrängmaskin del 2. Stockholm: Skogsarbeten.
- Öhman E 2013. The wheeled forwarders technical development [Arbetsrapport 395 2013, Masters thesis]. Institutionen för skoglig resurshushållning, Sveriges lantbruksuniversitet.
- Østby-Berntsen Ø, Fjeld D. 2018. Mulighetsstudie: skånsomme lassbærere for bæresvak mark. New forwarders for low bearing capacity. Norskog-rapport. 3, 2018 (44 pp)
- Nordfjell T, Öhman E, Lindroos O, Ager B. 2019. The technical development of forwarders in Sweden between 1962 and 2012 and of sales between 1975 and 2017. Int J For Eng. 30(1):1–13. doi:10.1080/14942119.2019.1591074.
- RTG. 1969. Angivande av marktryck för skogsmaskiner. Rådgivande teknikgruppens rekommendation nr 6904. Stockholm: Forskningsstiftelsen Skogsarbeten.
- Samset I. 1974. Forest terrain availability and its effect on forest conditions in Norway. Medd Nor Inst Skogforsk. 32:1–92.
- Seixas F, McDonald T. 1997. Soil compaction effects of forwarding and its relationship with 6‐ and 8‐wheel drive machines. Forest Prod J. 47(11/12):46–52.
- Wästerlund IBygden G. 2016. Tracks in the forest. Lambert Academic Publishing, Riga. 130pp.
- Willén E, Friberg G, Flisberg P, Andersson G, Rönnqvist M, Westlund K, Jönsson P. 2017. Bestway – decision support for proposing main base roads for forwarders – method report. Arbetsrapport Från Skogforsk Nr. 945–2017.