
 ?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.
?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.Abstract
Objective
The first automatic emergency braking (AEB) system was presented in 2003 and aimed to mitigate or reduce rear-end crashes. Since then, several AEB systems aimed to reduce other collision types have been introduced and studies have shown that they reduce crash risks. The aim with this study was to evaluate crash reductions of cars fitted with AEB systems with pedestrian detection and those with bicyclist detection.
Methods
The study is based on the Swedish Traffic Accident Data Acquisition that includes road traffic accidents reported by the police and by emergency hospitals. Crashes occurring between 2015 and 2020 and with cars from model years 2015 to 2020 were included. The statistical analysis used odds ratio calculations with an induced exposure approach where the outcomes of sensitive and nonsensitive crashes were studied. The sensitive crashes were hit pedestrians and bicyclists, respectively. The nonsensitive crash type in both comparisons was struck vehicles in rear-end crashes. Evaluations were also made for different light and weather conditions and for high and low speed roads.
Results
Seven hundred and twelve hit pedestrians and 1,105 hit bicyclists were included, and the nonsensitive crashes consisted of 1,978 vehicles. The overall reduction on crash risk for AEB with pedestrian detection was 8% (±15%; ns) and for AEB with bicyclist detection it was 21% (±17%). When separating for light conditions, no reduction in crash risk for AEB with pedestrian detection nor for AEB with bicyclist detection could be seen in darkness. However, in daylight and twilight conditions, AEB with pedestrian detection reduced pedestrian crash risk by 18% (±19%; ns) and AEB with bicyclist detection reduced bicyclist crash risk by 23% (±19%). No significant reductions could be seen when separating for weather conditions except for a 53% (±31%) reduction for bicyclists in rain, fog, and snowfall. A larger reduction on high-speed roads (50–120 km/h) compared with low-speed roads (10–40 km/h) was also found.
Conclusions
AEB systems with bicyclist detection were found to reduce the numbers of hit bicyclists, especially in daylight and twilight conditions. In darkness, no reduction for hit pedestrians or bicyclists was found.
Introduction
Worldwide, fatalities in the road transport system are dominated by car occupants, but the second largest group is pedestrians struck by motor vehicles (Naci et al. Citation2009; World Health Organization Citation2018). Road traffic fatalities are decreasing in Europe, especially regarding car occupants. However, fatalities among pedestrians and bicyclists do not follow the same positive trend (ETSC Citation2015; STA Citation2019). In the European Union, 21% of all fatalities in the road transport system are pedestrians (European Union Citation2019), and bicyclists account for approximately 8% (ETSC Citation2015). In Sweden, 18% of fatalities were pedestrians and 10% were bicyclists when fall injuries were included (Amin et al. Citation2022), and in terms of serious injuries, pedestrians are the most frequently injured road user group, followed by bicyclists (Amin et al. Citation2022).
In the line with the United Nation’s global goals on sustainability, several initiatives promote walking and cycling. However, if effective countermeasures are not implemented, an increased number of pedestrians and bicyclists will lead to an increased number of road casualties. Therefore, further initiatives aimed at reducing the number of killed pedestrians and bicyclists are needed.
Several countermeasures aimed to prevent serious injuries and deaths among vulnerable road users have shown positive effects. In crashes between vehicles and vulnerable road users, impact speed is one of the parameters with the highest influence on the risk of fatality and serious injury (Rosén and Sander Citation2009; Rosén et al. Citation2011). Therefore, in areas where vulnerable road users and vehicles are mixed in a planned and frequent manner, a maximum speed limit of 30 km/h should be applied (Stockholm Declaration Citation2020). In addition to speed limits, vehicle speed can be controlled and reduced by infrastructure countermeasures, such as speed bumps and chicanes (Pucher et al. Citation2010; Lee et al. Citation2013; Agerholm et al. Citation2017), and physical separation in the form of separated paths for pedestrians and bicyclists, as well as safety barriers (Kullgren et al. Citation2017) or tunnels and footbridges (Höye Citation2017). In studies that have identified the potential of many countermeasures aimed at reducing accidents with pedestrians and bicyclists, automatic emergency braking (AEB) systems with detection of vulnerable road users was found to have the greatest potential (Rosén et al. Citation2010; Kullgren et al. Citation2017, Citation2019).
The first AEB system was presented in 2003 and aimed at reducing the risk of rear-end crashes at low speed (Kodaka et al. Citation2003). Since then, many AEB systems aimed at reducing other collision types have been introduced, such as AEB for collisions at higher speed into other vehicles or stationary objects, crossings, pedestrians, bicyclists, and large animals and rear AEB for crashes during reversing, some of which have been shown to be effective in reducing crashes (Rizzi et al. Citation2014; Fildes et al. Citation2015; Cicchino Citation2017; Ydenius et al. Citation2017; Decker et al. Citation2021). A recent U.S. study has also investigated the effectiveness of the AEB with detection of pedestrians (Cicchino Citation2022). However, so far, studies of the effectiveness of AEB with the detection of bicyclists have not been presented.
The aim of this study was therefore to evaluate crash reductions of cars fitted with AEB systems with pedestrian detection and those with bicyclist detection.
Methods
Data were retrieved from the Swedish Traffic Accident Data Acquisition (STRADA), a register that includes road traffic accidents reported by the police and by emergency hospitals where at least one person was injured (Transportstyrelsen Citation2022). Crashes occurring between 2015 and 2020 and with cars of model years 2015 to 2020 were included. The process for the evaluation is described in a flow chart (Figure A1, online supplement). The statistical analysis used odds ratio calculations with an induced exposure approach where the outcomes of sensitive and nonsensitive crashes were studied. The method can be used when true exposure is not available (Evans Citation1998). With this approach, the key point is to identify at least one crash type in which the countermeasure to be analyzed could be reasonably assumed (or known) not to be effective.
Figure 1. Matrix used for the induced exposure analyses: (A) Sensitive crashes: cars with and without AEB hitting a pedestrian or bicyclist and (B) nonsensitive crashes: struck vehicle in rear-end crashes.
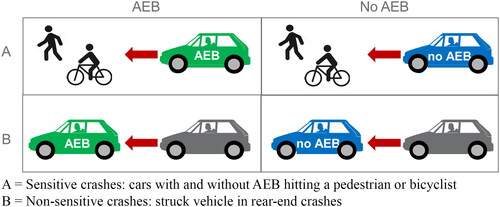
The sensitive crashes were hit pedestrians and bicyclists. The nonsensitive crash type used was struck vehicles in rear-end crashes. Fitment of AEB for detection of vulnerable road users in frontal impacts should not influence the risk of being struck in the rear. shows the matrix describing the groups. Evaluations were also made for different lighting conditions, weather conditions, and speed limits.
(1)
(1)
(2)
(2)
where AAEB-ped is the number of hit pedestrians, involving cars with AEB for pedestrians; Ano AEB-ped is the number of hit pedestrians, involving cars without AEB for pedestrians; BAEB-ped is the number of struck cars with AEB for pedestrians in rear-end crashes; Bno AEB-ped is the number of struck cars without AEB for pedestrians in rear-end crashes; AAEB-bicycle is the number of hit bicyclists, involving cars with AEB for bicyclists; Ano AEB-bicycle is the number of hit bicyclists, involving cars without AEB for bicyclists; BAEB-bicycle is the number of struck cars with AEB for bicyclists in rear-end crashes; and Bno AEB-bicycle is the number of struck cars without AEB for bicyclists in rear-end crashes.
For each equation, the effectiveness (%) in terms of crash reduction can be expressed as
(3)
(3)
The standard deviation of each effectiveness was calculated based on a simplified odds ratio variance according to EquationEq. (4)(4)
(4) :
(4)
(4)
where m is the number of crashes of each type. The 95% confidence limits for each effectiveness are given in EquationEq. (5)
(5)
(5) :
(5)
(5)
Results
A total of 712 hit pedestrians and 1,105 hit bicyclists were included. The nonsensitive crashes consisted of 1,978 struck vehicles in rear-end collisions. The existence of AEB was identified in most vehicles except those noted as unknown ().
Table 1. Number of hit pedestrians, number of rear-end crashes, and injury crash reduction for cars with AEB for pedestrians and bicyclists.
The overall reduction in crash risk for AEB with pedestrian detection was 8% (±15%; not significant) and for AEB with bicyclist detection it was 21% (±17%; significant; ). When separating for lighting conditions, no reduction in crash risk for AEB with pedestrian detection or for AEB with bicyclist detection could be verified in darkness (−8% ± 37% for pedestrians and −9% ± 61% for bicyclists). However, in daylight and twilight conditions, AEB with pedestrian detection was found to reduce pedestrian crash risk by 18% (±19%) and AEB with bicyclist detection was found to reduce bicyclist crash risk by 23% (±19%). With the data available, no significant reductions were observed when separating for weather conditions except for a 53% (±31%) reduction for bicyclists in rain, fog, and snowfall. A larger reduction on high-speed roads (50–120 km/h) compared to low-speed roads (10–40 km/h) was also found ().
Discussion
From both public health and environmental perspectives, the ambition is to increase the number of pedestrians and bicyclists, and it has been shown that the positive effects of cycling outweigh the increased risks (de Hartog et al. Citation2010). However, increased protection of vulnerable road users is essential and desirable to be able to increase the number of pedestrian and bicyclist trips, especially in urban areas.
Studies have shown that the potential of AEB with detection of pedestrians and bicyclists to avoid crashes is high, meaning that AEB can address many of the accidents (Kullgren et al. Citation2017, Citation2019). Although AEB systems with both pedestrian and bicyclist detection show a crash reduction, this study shows a relatively low reduction compared to AEB aimed at avoiding or mitigating collisions with other vehicles. Another study has shown a slightly higher injury crash reduction for AEB for pedestrians (29%–30%) and a higher reduction at lower speeds (up to 56 km/h; Cicchino Citation2022).
Clearly, to be able to reach the full potential of AEB, the effectiveness needs to increase, and it appears that AEB alone will not be enough to protect vulnerable road users. To ensure protection of vulnerable road users in cities and other low-speed areas, a combination of maintaining speed below 30 km/h (for example, by geofencing) and AEB and good passive protection on car fronts in case of an accident could be used, as proposed by others (Lubbe et al. Citation2022).
The findings regarding the performance of AEB for pedestrians in various lighting conditions are in line with those of another recent study (Cicchino Citation2022). Bad performance in darkness is critical because studies have shown that, to a large extent, pedestrians are hit in darkness. The same poor performance in darkness was also found for AEB with bicyclist detection, thereby showing the importance of improving detection in darkness.
Furthermore, in poor light there may be too little time for the system to be able to detect and activate. Many bicyclists enter the road less than 1 s before impact, which makes it difficult for the AEB system to react, assuming that 1 s is needed for the system to be able to detect and react (Haus et al. Citation2021). It is proposed that in areas where vulnerable road users and vehicles are mixed in a planned and frequent manner, a maximum speed limit of 30 km/h should be applied (Stockholm Declaration Citation2020). This would probably increase the possibility for the AEB systems to detect vulnerable road users, which would increase their effectiveness.
The reductions for both AEB systems evaluated were higher under bad weather condition (rain, fog, or snowfall) compared with good visibility, which could seem unlikely at a first glance. However, this could be due to the relationship between car and driver; that is, the car may be better a driver at detecting vulnerable road users in bad weather. However, this needs to be further evaluated.
Another finding was that the reduction on low-speed roads (10–40 km/h) was lower than that on high-speed roads (50–120 km/h). This somewhat contradicts the results found by Cicchino (Citation2022). However, this study involved many accidents on parking lots, walking and cycling paths, and other low-speed areas. The reduction in these areas may be lower because the driver has time to react and steer or brake, meaning that the AEB may not be activated. This should be further evaluated with larger data sets.
The effect of AEB on injury severity for vulnerable road users was not evaluated in this study and should be further studied.
Research strength and limitations
This study is based on real-world crashes that occurred in the Swedish traffic environment and were registered in STRADA. The register offers a unique opportunity to study this problem using accident data reported by the police and injury data from every emergency hospital in Sweden. The register data contain detailed information about characteristics from many crashes in Sweden, such as how the accident occurred and which road users were involved. STRADA includes vehicle data such as make, model, model year, and vehicle identification number. Based on this information, it was possible to identify whether AEB for pedestrians and bicyclists was fitted for each involved vehicle.
The present research used an induced exposure approach, as in several previous studies (Evans Citation1998; Strandroth et al. Citation2012; Rizzi et al. Citation2014). Other exposures could also be used for this kind of evaluation; for instance, the number of registered vehicles with and without the analyzed technology. However, these may include confounding factors for which an induced exposure approach would normally compensate, because the result is given by the relative differences within the AEB and non-AEB groups. The present method, however, is based on some assumptions that are important to discuss. The most critical step in the analysis is to determine the nonsensitive crash type. In the present study, struck rear-end crashes were considered nonsensitive. There is no reason to believe that AEB for detection of vulnerable road users in frontal impacts would influence the risk of being struck in the rear.
Data quality is also a limitation that needs to be discussed. Police-reported crashes were used, and these are well known to suffer from quality issues. This aspect was especially important in the case of defining the striking and struck cars for the calculations using the induced exposure technique. To improve quality, this classification was done manually, based on the description of the crashes made by the police officer at the crash scene.
Most of the vehicles included (both study group and control group) were fitted with AEB City systems aimed to avoid or mitigate low speed rear-end crashes. Under certain circumstances, AEB City may also detect pedestrians and bicyclists. A crude analysis of the reduction in hit pedestrians was conducted and indicated no reduction. However, this should be further investigated. If AEB City has a small effect on vulnerable road users, the true reduction with detection of vulnerable road users would be somewhat larger than what was found in this study.
Furthermore, during the model year period 2015 to 2020, there have been improvements of pedestrian AEB performance, which can be seen in the performance in the European New Car Assessment Programme assessments. When more data are available, further research should be conducted including shorter time spans; for example, model years 2018 to 2020 and later intervals.
Lastly, the Swedish car fleet has a larger proportion of Volvo models than other countries, which should be considered in comparisons with studies using data sets from other countries.
In conclusion, even though there are several factors that could influence the findings of the present study, AEB systems with bicyclist detection were found to reduce the number of hit bicyclists, especially in daylight and twilight conditions. No reduction in hit pedestrians or bicyclists in darkness was observed. Generally, the more noise in the data, the lower the effectiveness that will be found (Kullgren and Lie Citation1998); therefore, there is reason to believe that the true effect of AEB systems may be larger than those presented.
Supplemental Material
Download Zip (175.1 KB)Funding
The author(s) reported there is no funding associated with the work featured in this article.
References
- Agerholm N, Knudsen D, Variyeswaran K. 2017. Speed-calming measures and their effect on driving speed – test of a new technique measuring speeds based on GNSS data. Transp Res Part F Traffic Psychol Behav. 46:263–270. doi:10.1016/j.trf.2016.06.022
- Amin K, Skyving M, Bonander C, Krafft M, Nilson F. 2022. Fall- and collision-related injuries among pedestrians in road traffic environment – a Swedish national register-based study. J Saf Res. 81:153–165. doi:10.1016/j.jsr.2022.02.007
- Cicchino JB. 2017. Effectiveness of forward collision warning and autonomous emergency braking systems in reducing front-to-rear crash rates. Accid Anal Prev. 99(Pt A):142–152. doi: 10.1016/j.aap.2016.11.009.
- Cicchino JB. 2022. Effects of automatic emergency braking systems on pedestrian crash risk. Accid Anal Prev. 172:106686. doi: 10.1016/j.aap.2022.106686.
- de Hartog J, Boogaard H, Nijland H, Hoek G. 2010. Do the health benefits of cycling outweigh the risks? Environ Health Perspect. 118(8):1109–1116.
- Decker JA, Haus SH, Sherony R, Gabler HC. 2021. Potential benefits of animal-detecting automatic emergency braking systems based on U.S. driving data. Transp Res Rec. 2675(10):678–688. doi:10.1177/03611981211012416
- ETSC 2015. Making walking and cycling on Europe's roads safer (PIN Flash 29). http://etsc.eu/wp-content/uploads/etsc_pin_flash_29_walking_cycling_safer.pdf
- European Union. 2019. 2019 road safety statistics: what is behind the figures? [accessed 2022 Oct 14]. https://ec.europa.eu/commission/presscorner/detail/en/QANDA_20_1004.
- Evans L. 1998. Antilock brake systems and risk of different types of crashes in traffic. Presented at: ESV Conf. Paper No 98-S2-O-12, Windsor, Canada.
- Fildes B, Keall M, Bos N, Lie A, Page Y, Pastor C, Pennisi L, Rizzi M, Thomas P, Tingvall C. 2015. Effectiveness of low speed autonomous emergency braking in real-world rear-end crashes. Accid Anal Prev. 81:24–29. doi:10.1016/j.aap.2015.03.029
- Haus SH, Anderson RM, Sherony R, Gabler HC. 2021. Potential effectiveness of bicycle-automatic emergency braking using the Washtenaw Area Transportation Study Data Set. Transp Res Rec. 2675(9):265–270. doi:10.1177/03611981211001377
- Höye A. 2017. Infrastrukturtiltak for syklister. Trafikksikkerhetshåndbok. Transportøkonomisk institutt TØI.
- Kodaka K, Otabe M, Urai Y, Koike H. 2003. Rear-end collision avoidance assist system. The 18th ESV Conf., Paper Number 405, Nagoya, Japan.
- Kullgren A, Lie A. 1998. Vehicle collision accident data – validity and reliability. J Traffic Med. 26(3-4):77–98.
- Kullgren A, Rizzi M, Stigson H, Ydenius A, Strandroth J. 2017. The potential of vehicle and road infrastructure interventions in fatal pedestrian and bicyclist accidents on Swedish rural roads – what can in-depth studies tell us? ESV Conf. Paper number: 17–0284, Detroit, Michigan, USA.
- Kullgren A, Stigson H, Ydenius A, Axelsson A, Engström E, Rizzi M. 2019. The potential of vehicle and road infrastructure interventions in fatal bicyclist accidents on Swedish roads – what can in-depth studies tell us? Traffic Inj Prev. 20(sup1):S7–S12. doi: 10.1080/15389588.2019.1610171.
- Lee G, Joo S, Oh C, Choi K. 2013. An evaluation framework for traffic calming measures in residential areas. Transp Res Part D Transp Environ. 25:68–76. doi:10.1016/j.trd.2013.08.002
- Lubbe N, Wu Y, Jeppsson H. 2022. Safe speeds: fatality and injury risks of pedestrians, cyclists, motorcyclists, and car drivers impacting the front of another passenger car as a function of closing speed and age. Traffic Saf Res. 2:000006. doi:10.55329/vfma7555
- Naci H, Chisholm D, Baker TD. 2009. Distribution of road traffic deaths by road user group: a global comparison. Inj Prev. 15(1):55–59.
- Pucher J, Dill J, Handy S. 2010. Infrastructure, programs, and policies to increase bicycling: an international review. Prev Med. 50 Suppl 1:S106–S25. doi:10.1016/j.ypmed.2009.07.028
- Rizzi M, Kullgren A, Tingvall C. 2014. Injury crash reduction of low-speed Autonomous Emergency Braking (AEB) on passenger cars. Presented at: International Research Council on the Biomechanics of Injury Conference, IRCOBI 2014, Berlin, Germany.
- Rosén E, Kallhammer JE, Eriksson D, Nentwich M, Fredriksson R, Smith K. 2010. Pedestrian injury mitigation by autonomous braking. Accid Anal Prev. 42(6):1949–1957. doi:10.1016/j.aap.2010.05.018
- Rosén E, Sander U. 2009. Pedestrian fatality risk as a function of car impact speed. Accid Anal Prev. 41(3):536–542.
- Rosén E, Stigson H, Sander U. 2011. Literature review of pedestrian fatality risk as a function of car impact speed. Accid Anal Prev. 43(1):25–33.
- STA 2019. Analysis of road safety trends 2018. Borlänge, Sweden. http://trafikverket.diva-portal.org/smash/get/diva2:1389250/FULLTEXT01.pdf
- Stockholm Declaration. 2020. Stockholm Declaration on road safety. Presented at: the 3rd Global Ministerial Conference on Road Safety, Stockholm, Sweden. https://www.government.se/492199/contentassets/2b0b907242fc407da58757bf2b70370e/stockholm-declaration-english.pdf.
- Strandroth J, Rizzi M, Olai M, Lie A, Tingvall C. 2012. The effects of studded tires on fatal crashes with passenger cars and the benefits of electronic stability control (ESC) in Swedish winter driving. Accid Anal Prev. 45:50–60. doi:10.1016/j.aap.2011.11.005
- Transportstyrelsen. 2022. Om olycksdatabasen STRADA (Description of STRADA). [accessed 2022 Oct 14]. https://www.transportstyrelsen.se/sv/vagtrafik/statistik/olycksstatistik/om-strada/.
- World Health Organization. 2018. Global status report on road safety 2018. [accessed 2022 Oct 14]. https://www.who.int/publications/i/item/9789241565684
- Ydenius A, Kullgren A, Engström E, Stigson H, Strandroth J. 2017. Fatal car to moose collisions: real-world in-depth data, crash tests and potential of different countermeasures. ESV Conf. Paper Number: 17–0294, Detroit, Michigan, USA.