
 ?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.
?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.Abstract
The Landau-de Gennes elastic free energy of liquid crystals is a functional expressed in terms of a symmetric traceless tensor order parameter. We derive convexity criteria for SO(3)-invariant expansions of the elastic energy that are quadratic in the gradient and up to fourth-order overall in the tensor order parameter. To do so we write the integrand as the sum of squares of linearly independent spherical tensors from which definiteness criteria can be ascertained. In particular, transformations between Cartesian and spherical tensors representations are computed based on irreducible tensor representations of the rotation group.
1. Introduction
The orientational properties of liquid crystals for the nematic-isotropic transition may be specified, at each point in the medium, by a symmetric traceless 2-tensor
of Cartesian components
(
). By definition, the tensor vanishes in the isotropic phase and thus serves as an order parameter. In a general nematic phase, the order parameter has five degrees of freedom (two specifying the degree order with the other three for the principal directions). To find the equilibrium state of the medium, one seeks a minimizer of the free energy functional. The existence of a minimizer is typically established using direct methods whereby the key requirement is for the functional to be weakly sequentially lower semicontinuous with respect to the Sobolev norm (cf. [Citation1]). Thus, we seek to ascertain sufficient conditions (in the form of convexity conditions for the integrand) as a means of ensuring lower semicontinuity.
In Landau’s theory of phase transitions [Citation2], the free energy is expanded as a function of the order parameter into powers of Q and its derivatives [Citation3,Citation4]. The expansion is subject to the condition that free energy is invariant under the rotation group SO(3) (which consists of real 3 × 3 matrices R that satisfy and have determinant 1). Thus we seek to minimize the elastic free energy part of the Landau-de Gennes functional of the form
on an open bounded domain
for the medium. Note that a bulk-free energy term of the form
is added to the elastic integrand
however, we are only concerned with the non-trivial free energy term that involves quadratic derivatives of Q. The addition of a typical bulk term is a trivial extension with regards to sufficient conditions for lower semicontinuity.
The elastic energy integrand fE is subject to requirement that it is invariant under the group action of SO(3) by conjugation, i.e. the action given by
for any
*
The principal Landau-type expansion of the elastic energy into SO(3)-invariant terms quadratic in takes the form
(1)
(1)
with elastic constants L1, L2, and L3. Note that there are only five possible contractions of a symmetric 2-tensor in the form
(the other remaining two terms
and
are excluded by the traceless requirement).† The associated surface relation (i.e. null Lagrangian) is given by
We remark that while de Gennes’ theory gives a simple expression for the Oseen–Frank elastic energy constants, the expansion given by Equation (Equation1(1)
(1) ) implies a degeneracy in the splay and bend constants; a degeneracy that is in clear contradiction with experiment (see, e.g. [Citation5–7]).‡ Hence the expansion of EquationEquation (1)
(1)
(1) is deemed too simple to describe correctly elastic properties of real liquid-crystal materials.
One way to rectify this issue is to consider higher order SO(3)-invariant terms of the form and
i.e. terms that are quadratic in the gradient and third or fourth-order overall in the tensor order parameter. A program along these lines has been carried out by [Citation8–10] for such third-order invariants and extended to fourth-order by [Citation11]. Using a brute-force-method developed in [Citation12] we calculate all contractions of a particular tensorial expression and confirm that there are three invariants of the form
seven invariants of the form
, and nineteen invariants of the form
for a symmetric traceless 2-tensor Q (cf. Appendix A). By doing so we find five additional invariants of the form
that are previously not listed in [Citation11]. There is also an additional complication residing in fact that there are a certain number of (not at all immediately obvious) linear dependences between terms of higher order invariants. In Appendix D, we show that there is a maximum of six linearly independent invariants of the form
and a maximum of thirteen linearly independent invariants of the form
We remark that the result of Theorem 2.5 below could, in principle, be extended to incorporate higher order terms of the form
and
or indeed other systems in condensed matter physics with different order parameters (e.g. the order parameter of anisotropic superfluid liquid helium-3 in the Ginzburg–Landau regime [Citation13, p. 541]).
By taking the first six invariants listing in Equation (59), we see that the third-order linearly independent SO(3)-invariant terms of the form can be written out as a linear combination of the form
(2)
(2)
with elastic constants
and one surface relation given by
In addition to the six invariants included in EquationEquation (2)(2)
(2) , the final invariant of the form
(3)
(3)
can be expressed as a linear combination of the other six terms, namely
(4)
(4)
with
(5)
(5)
A computation of the linear dependencies in EquationEquation (5)(5)
(5) is given by EquationEquation (61)
(61)
(61) in Appendix D.1. We remark that the relations given by EquationEquation (5)
(5)
(5) with
also show that the six terms in EquationEquation (2)
(2)
(2) are linearly independent of one another. In this way, Equation (Equation2
(2)
(2) ) gives an expansion of SO(3)-invariant terms of the form
that is of full rank.
For fourth-order terms of the form we can use the first thirteen invariants listing in Equation (60) to write the SO(3)-invariant expansion into linearly independent terms of the form
(6)
(6)
with elastic constants
and two surface relations given by
and
In addition to the terms listed in EquationEquation (6)(6)
(6) , there are a further six terms (i.e. the last six invariants listing in Equation (60)) of the form:
(7)
(7)
By setting
(8)
(8)
a computation given in Appendix D.2 shows that
(9)
(9)
Therefore, the terms listed in EquationEquation (7)(7)
(7) are linearly dependent on the 13 terms listed in EquationEquation (6)
(6)
(6) . Moreover, if we set
in EquationEquation (9)
(9)
(9) , an elementary computation shows that
Hence, the terms listed in EquationEquation (7)
(7)
(7) are linearly independent of one another. Furthermore, if we set
in EquationEquation (9)
(9)
(9) , then
Hence, the 13 terms listed in EquationEquation (6)
(6)
(6) are linearly independent of one another. In this way, we obtain an expansion given by Equation (Equation6
(6)
(6) ) of SO(3)-invariant terms of the form
that is of full rank.
de Gennes’s original expression [Citation4] for the expansion of the free-energy density in the absence of electric and magnetic fields also included a chiral term linear in the gradient of Q of the form Here,
denotes the Levi-Civita tensor. For terms that are second order in
and up to fourth-order overall in the tensor order parameter there are three other chiral terms linear in the gradient of Q, namely those of the form
and
(cf. [Citation8,Citation11,Citation14]). We remark that these terms do not play a part in the integrand’s convexity, as per the condition of EquationEquation (10)
(10)
(10) , due to the fact that they are only linear in the gradient of Q. Nevertheless, it is possible to consider further higher-order SO(3)-invariants terms like
which are quadratic in derivatives of Q (cf. [Citation14]). Indeed, from the computations in Appendix A, we note that there are 36 invariants of the form
and 70 invariants of the form
When addressing the questions of the existence of a minimizer of the Landau-de Gennes elastic free energy functional, the convexity of the function and a coercivity requirement for fE is a sufficient conditions for the existence of a minimizer of the functional
in the class of Sobolev functions (cf. [Citation15, Theorem 3.30]). Hence we want to equate the convexity of
for the expansions given by the Equations (Equation1
(1)
(1) ), (Equation2
(2)
(2) ), and (Equation6
(6)
(6) ) with conditions for the elliptic constants L1, L2, L3,
These convexity conditions are sought by means of a ‘change of coordinates’ whereby a spherical form of the Q-tensor, rather than the above Cartesian form, provides a natural setting for deriving the desired convexity conditions.
2. Statement of results
Let be an integrand with the assumption that
is a C2-function. Such an integrand f(Q, P) is said to be (uniformly) superelliptic (cf. [Citation16, p. 231]) if the condition
(10)
(10)
holds for some
for all Q, P , and all matrices
(not just those matrices of rank one). Note that if the inequality of EquationEquation (10)
(10)
(10) is fulfilled, then f(Q, P) is strictly convex in P.
For the principal expansion of Equation (Equation1(1)
(1) ), we obtain the following well-known result:
Theorem 2.1
([Citation11]). The integrand satisfies the superelliptic condition of EquationEquation (10)
(10)
(10) if and only if the elastic constants L1, L2, L3 for the integrand given by EquationEquation (1)
(1)
(1) satisfy the inequalities
(11)
(11)
Note that the conditions of EquationEquation (11)(11)
(11) are highly dependent on the imposed symmetry relations
and
Corollary 2.2.
The integrand
satisfies the superelliptic condition of EquationEquation (10)
(10)
(10) whenever
and the conditions of EquationEquation (11)
(11)
(11) hold.
Proof.
The result follows from the fact that together with Theorem 2.1. □
Remark 2.3.
A proof of Theorem 2.1 using spherical tensor representations (along the lines given in [Citation11,Citation14]) is presented in Section 4.1. The idea of this technique is to rewrite in terms of an irreducible tensor decomposition so that the functional of EquationEquation (1)
(1)
(1) can be written out as a sum of squares (cf. Remark 4.1). A new proof via Sylvester’s criterion§ confirms the conditions of EquationEquation (11)
(11)
(11) without the recourse of spherical tensor representations (cf. Section 4.2). In [Citation17], a different proof was given using Lagrange multiplies.
Remark 2.4.
The set of symmetric traceless 2-tensors forms an irreducible 5-dimensional subspace under the action of SO(3) by conjugation, however, the Q-tensor in its Cartesian manifestation takes the form of a 3 × 3 matrices of elements Qαβ with the redundancy that the upper triangle elements are equal to the lower ones and that the trace of the matrix is equal to zero. From this point of view, the usual definition of a tensor in the Cartesian system of coordinates is unsuitable; it is preferable to classify these operators according to their behavior with respect to a rotation of the system of coordinates. One of the advantages of regarding the Q-tensor as a spherical tensor of degree 2 is that it has a naturality in so far as it provides the required five components for this irreducible subspace (that are related to the Cartesian form Qαβ by EquationEquation (31)
(31)
(31) below). Thus the theory of irreducible tensor operators works hand in glove with SO(3)-invariant expansions of the elastic energy integrand, so much so that the integrand given by EquationEquation (1)
(1)
(1) can be rewritten as the square of the irreducible components of the gradient of Q (from which the conditions of EquationEquation (11)
(11)
(11) are a ascertained). The transition from Cartesian to spherical tensors can be regarded as a change of variables that are determined by the Clebsch–Gordan coefficients.
For the benefit of the reader, we give a general review of the representation theory needed for irreducible tensor operators in Section 3. This overview includes the well-known integer-spin index irreducible representation of the Lie group SO(3) via the associated Lie algebra (given in Section 3.1) and the decomposition of the tensor product into irreducible parts using the Clebsch–Gordan coefficients (given in Section 3.2). A review of the general theory of irreducible tensor operator is done in Section 3.3 before in the theory is applied to SO(3) (in Section 3.4) to produce the so-called spherical tensors. Finally, the transformation between Cartesian and spherical tensors is derived recursively in Section 3.5.
We further remark that the results covered in Section 3 are well known in quantum mechanics whereby the angular momentum operator and, in particular, the addition of angular momenta provides the model problem for spherical tensor representations (see, e.g. [18, Chapter XIV]). In fact, the concept of irreducible tensor operators was developed as a part of the new algebraic and group theoretical methods for the analysis of complex spectra in atomic and nuclear spectroscopy. The details of the theory and proofs of the results cover in Section 3 can be found in, e.g. [Citation18–23].
2.1. Higher-order expansions
For an analysis of the higher-order expansions of form given by Equations (Equation2(2)
(2) ) and (Equation6
(6)
(6) ), the spherical tensors technique using in the proof of Theorem 2.1 is not directly applicable. Nevertheless, it is possible to rewrite Equations (Equation2
(2)
(2) ) and (Equation6
(6)
(6) ) in a spherical basis as a sum of terms that are full squares (from which one can obtain positive definiteness as a quadratic form jointly in the variables Qαβ and
).
Theorem 2.5.
The integrand
(12)
(12)
comprising of the sum of the expansions given by EquationEquations (1)
(1)
(1) , Equation(2)
(2)
(2) , and (Equation6
(6)
(6) ), satisfies the superelliptic condition of EquationEquation (10)
(10)
(10) whenever the inequalities of EquationEquation (11)
(11)
(11) are satisfied and the block diagonal matrix of
(13)
(13)
is non-negative definite. The matrix elements of EquationEquation (13)
(13)
(13) are related to the 22 constants given in EquationEquation (1)
(1)
(1) , Equation(2)
(2)
(2) , and (Equation6
(6)
(6) ) by the linear relations
(14)
(14)
with transition matrices
, and
given by EquationEquations (41)
(41)
(41) , (Equation52
(52)
(52) ), and (Equation53
(53)
(53) ).
The definiteness condition for the matrix of EquationEquation (13)(13)
(13) is equivalent to joint convexity of
Also, note that the convexity of
implies the convexity of
However, it is possible that the condition of EquationEquation (10)
(10)
(10) holds even if the definiteness condition for the matrix of EquationEquation (13)
(13)
(13) fails. For example, in contrast to Corollary 2.2, we find (cf. Section 4.5) that the linear dependencies in EquationEquation (9)
(9)
(9) with
imply that:
Corollary 2.6
. The integrand
(15)
(15)
does not have a matrix given by EquationEquation (13)
(13)
(13) that is non-negative definite for any non-zero N14.
Remark 2.7.
A proof of Theorem 2.5 is presented in Section 4.3 (based on ideas from [Citation11]). The idea of the proof is to rewrite the Cartesian expansion of Equation (Citation12) in a spherical representation as a sum of squares which can then be interpreted as a non-negative definite quadratic form. Due to the large number of individual terms in the series expansions, the computation of the transition matrices and
is carried out with the assistance of a computer algebra package (the details of which are presented in Appendices C.Citation1–C.3).
Remark 2.8.
From the linear dependences in EquationEquation (5)(5)
(5) one can choose any six of the seven invariants listed in Equation (59). Likewise, from the linear dependences in EquationEquation (9)
(9)
(9) one can choose any 13 of the 19 invariants listed in Equation (60). Since non-negative definiteness of the matrix of EquationEquation (13)
(13)
(13) is independent of choice of basis, any choice of invariants from Equations (59) and (60) will suffice so long as they are linearly independent and of maximal rank.
Remark 2.9.
If we suppose Sylvester’s criterion implies that the matrix
is positive definite if and only if the inequalities
all hold. On the other hand, it is clear that
has negative eigenvalues whenever
together with some non-vanishing
The application of Sylvester’s criterion to the matrix of EquationEquation (13)(13)
(13) yields polynomial inequalities that are difficult to manage. An alternative approach is to use an elementary polarization identity. This allows one to replace the definiteness requirement for the matrix of EquationEquation (13)
(13)
(13) by a series of linear inequalities, namely:
Corollary 2.10.
The integrand
comprising of the sum of the expansions given by EquationEquations (1)(1)
(1) , (Equation2
(2)
(2) ), and (Equation6
(6)
(6) ), satisfies the superelliptic condition of EquationEquation (10)
(10)
(10) whenever the inqualities of EquationEquation (11)
(11)
(11) are satisfied and the 22 inequalities
(16)
(16)
hold. The parameters in EquationEquation (16)
(16)
(16) are related to the 22 constants given in Equations (Equation1
(1)
(1) ), (Equation2
(2)
(2) ), and (Equation6
(6)
(6) ) by the linear relations of EquationEquation (14)
(14)
(14) with transition matrices
and
given by Equations (Equation41
(41)
(41) ), (Equation52
(52)
(52) ), and (Equation53
(53)
(53) ).
Remark 2.11.
For an integrand of the form of Equation (15), it is easy to see that at least one of the inequalities in EquationEquation (16)(16)
(16) fail to hold for any non-zero value of N14.
2.2. Special cases
The above results indicate the stability requirements for higher-order expansions (as a polynomial in both Qαβ and ) to satisfy the superellipticity of EquationEquation (10)
(10)
(10) could be resolved by imposing upper and lower eigenvalue bounds on Q. Such eigenvalue bounds appear naturally in the mean-field approach of Maier and Saupe. Indeed, we get the following (cf. [Citation24]):
Proposition 2.12.
Let be a subset of
given by
(17)
(17)
If the eigenvalues of the Q-tensor satisfy the bounds
(18)
(18)
and
with
, then the integrand
(19)
(19)
satisfies the superelliptic condition of EquationEquation (10)
(10)
(10) .
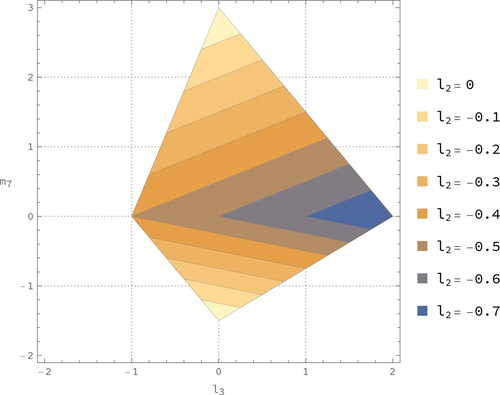
Remark 2.13.
A contour plot of the region defined by EquationEquation (17)(17)
(17) is given in . Note that the conditions given in EquationEquation (17)
(17)
(17) reduce to those of EquationEquation (11)
(11)
(11) whenever
Figure 1. Contour plot of the region defined by EquationEquation (17)
(17)
(17) in the
-plane with
, and
When
the values of
and m7 are bounded by the outer large irregular rectangle.
Proof.
From the assumption of Equation (18) and the SO(3) rotation invariance, we have
Then by Theorem 2.1, we know the desired conclusion follows if and the tuple
is an element of the set of all
such that
where
Elementary algebra shows the latter set is equivalent to the region given by EquationEquation (17)(17)
(17) . □
Remark 2.14.
The work of Ball and Majumdar [Citation24,Citation25] has shown that (for and arbitrary boundary conditions) the functional
(20)
(20)
where the SO(3)-invariant bulk free energy
is unbounded below (i.e. there is no global minimizer for the Landau-de Gennes free energy in the form of EquationEquation (20)
(20)
(20) when this cubic term is present).
Remark 2.15
(Oseen–Frank’s direction representation). In the constrained uniaxial nematic phase, the director approach to continuum modeling sees rod-like molecules represented by a unit vector in the direction of the principal axis with head-to-tail symmetry. The elastic Oseen–Frank energy is given by
with an integrand of the form
(21)
(21)
The first three terms represent energy contributions due to splay, twist, and bend spatial changes of n, respectively; the last term is a null-Lagrangian. The integrand satisfies the invariance properties
for all
The first properties account for the lack of polarity of nematics while the second properties express the frame invariance. Experimental measurements of the temperature-dependent elastic constants K1, K2, and K3 are known in various situations (cf. [Citation8,Citation26–29]).
Now in such a uniaxial region, the order tensor elements may be expressed as
where the scalar order parameter s > 0 is required to be constant in the constrained Landau-de Gennes theory. Given this, we find the elastic constants L1, L2, L3, and M7 for the integrand given by Equationequation (19)
(19)
(19) can be related to the above Oseen–Frank elastic constants by the expression (see, e.g. [Citation24,Citation30])
(22)
(22)
It follows that if and the tuple
is an element of the region defined by EquationEquation (17)
(17)
(17) , i.e. if the integrand
given by Equation (19) satisfies the superellipticity of EquationEquation (10)
(10)
(10) , then
and
is a point in the region
where a computation gives
(23)
(23)
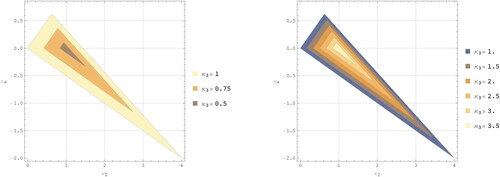
The conditions for the elastic constants in EquationEquation (23)(23)
(23) are different to the Ericksen inequalities stated in [Citation31]. To get an idea of the admissible parameter space afforded by the conditions in EquationEquation (23
(23)
(23) ), a contour plot of the region
is given for the case
in .
Figure 2. Contour plots of the region defined by EquationEquation (23)
(23)
(23) with
in the
-plane. The left-hand plot is for the case
while the right-hand plot is for the case
3. Irreducible tensor representations of the rotation group
A Lie algebra is a vector space over a field F together with a Lie bracket (i.e. an alternating bilinear map
denoted
) that satisfies the Jacobi identity
For a given vector space V, the general linear Lie algebra
consists of all linear endomorphisms of V with a Lie bracket given by the commutator of endomorphisms.
A representation of a Lie algebra
comprises a vector space V and a Lie algebra homomorphism
This allows one to reproduce the Lie bracket for
by the commutator in the general linear algebra of V. The vector space V on which the representation matrices act is called a
-module; the action
of
on V is given by
for all
and
Conversely, if V is a
-module then
defines a representation. Note that it is often convenient to use the language of modules along with the (equivalent) language of representations. A representation
is called irreducible if the only subspaces W of V such that
for all
are either {0} or V. If
and
are two representations of
the tensor product representation
is defined by
for all
and
A representation of a Lie group G acting on a finite-dimensional vector space V is a smooth group homomorphism
where GL(V) is the general linear group of all invertible linear transformations of V under their composition. The vector space V on which the representation matrices act is called a G-module; the action
of G on V is given by
for all
and
If
and
are two representations of G, the tensor product representation
is defined by
for all
and
A unitary representation of a Lie group G acting on a Hilbert space
over
is a group homomorphism
where
is the group of unitary operators on the Hilbert space
Note that a unitary operator is a bounded linear operator
which is both surjective and preserves the inner product (in the sense that
for all
). The induced linear operator representation
acting on the space of linear operators
is given by
for all
and
3.1. Relationship between Lie algebra and Lie group representations
We denote by the real Lie algebra spanned over
by the set
with Lie brackets
Instead of the generators Lx, Ly it is often more convenient to use the complex combinations
We let denote the complex Lie algebra spanned over
by the set
with Lie brackets
One then has (i.e. the complexified Lie algebra of the former equals the latter).
Theorem 3.1
([20, p. 180]). Let the Lie algebra be either
or its complexification
. To each spin index
there exists an irreducible
-dimensional representation
of
. A set of orthonormal basis vectors
for the
-module Vj can be chosen so that
Up to equivalence these are the only irreducible representation of
NB: One can think of as the ‘creation operator’ or the ‘raising operator’ and
as the ‘annihilation operator’ or the ‘lowering operator’ (cf. [21, p. 20]).
We now turn to representations of the special orthogonal group As the real Lie algebra
of
(which consists of antisymmetric real 3 × 3 matrices) is in fact isomorphic to
we have:
Corollary 3.2
([20, p. 184], [22, p. 101]). The -dimensional irreducible representation of
exponentiates to give a
-dimensional irreducible representation of SO(3) if and only if
We remark that since SO(3) is connected, any given finite-dimensional irreducible representation of SO(3) implies a unique representation
of
which is also irreducible (cf. [22, p. 79]).
3.2. Tensor products of irreducible representations
If and
are two irreducible representations of
the decomposition of the tensor product
-module
into irreducible parts has a Clebsch–Gordan series of the form
(24)
(24)
and is multiplicity free (i.e. VJ appears on the right-hand side only once for
). We remark that this direct sum is also the Clebsch–Gordan series for
and SO(3) whenever the spin indices j1 and j2 take non-negative integer values (cf. [20, p. 187]).
A natural basis for the tensor product module is given by the tensor product of the orthonormal basis elements, namely
However, we can also consider a second orthonormal basis
such that
As both and
form an orthonormal basis for the tensor product module, there is a unitary transformation between these two sets of bases given by
The coefficients are referred to as the Clebsch–Gordan coefficients, where in the notation
we have omitted the numbers j1 and j2. When necessary these are included in the form
Note that the Clebsch–Gordan coefficients can be expressed in terms of the Wigner 3j-symbols by the formula
and for J = 0 are given by
(25)
(25)
The Racah formula gives an explicit, but quite lengthy, general expression for the Clebsch–Gordan coefficients (cf. [21, p. 286], [18, p. 435]).
3.3. Representation theory for a family of linear operators sharing a common invariance group
Let be a finite-dimensional representation of a Lie group G on a vector space V and let
be its matrix form in a basis
of the vector space V. Let
be a unitary representation of a Lie group G acting on a Hilbert space
with induced linear operator representation
An intertwiner between the G-modules V and is a linear map
which commutes with the action of G in the sense that
for all
i.e. there is a subspace
of operators invariant under conjugation that acts like vectors invariant under the action of
Since ρ is linear, we find that
for each of the basis vectors ea of V.
A collection of operators is said to be a tensor operator if it forms such an invariant subspace under an intertwiner
i.e. it holds that
(26)
(26)
for all
and each
In other words, a collection of conjugation-invariant operators
in
transforms like a vector with respect to the group action on the G-module V. When the representation Π is irreducible,
is said to be an irreducible tensor operator (cf. [19, Chapter Citation9]). Note that any intertwiner between two irreducible G-modules is either an isomorphism or zero by Schur’s lemma.
The corresponding definition of tensor operators on the level of the Lie algebra of the Lie group G is obtained by inserting the representation of the infinitesimal generators (cf. [22, p. 79])
into EquationEquation (26)
(26)
(26) to obtain
(27)
(27)
for all
and each
Note that
is the induced representation of
on the vector space V and that
is the induced unitary representation of
on the Hilbert space
(where
is Lie algebra of anti-Hermitian operators).
Both definition, Equations (Equation26(26)
(26) ) and (Equation27
(27)
(27) ) are equivalent whenever the Lie exponential map
is surjective. In particular, the exponential map of a compact connected Lie group is surjective (cf. [21, p. 149]). Moreover, SO(3) is both compact and connected.
3.4. Spherical tensors
For a -dimensional irreducible representation
of the rotation group SO(3) with
the set of
components of an irreducible tensor operator must satisfy the rotation condition of EquationEquation (26)
(26)
(26) . A set of such quantities, denoted by
is called a spherical tensor of degree j (cf. [Citation18,Citation32]). For any
the components satisfy the condition
where the coefficients
form a matrix of order
with respect to m and
Each
is equivalent, as regards their transformation properties, to a set of
spherical harmonic functions Yjm (here the spherical harmonics play the role of operators and not of eigenfunctions). A computation (cf. [23, p. 55]) involving infinitesimal rotations for EquationEquation (26)
(26)
(26) yields the Racah commutative relations
The construction of tensor products of spherical tensors and
follows the above decomposition of Section 3.2, i.e. one can form spherical tensors of degrees
by means of the formulae
(28)
(28)
Such tensor products satisfy the condition of EquationEquation (26)(26)
(26) . The scalar product of spherical tensors of the same degree j is given by
(29)
(29)
where the complex conjugate of a spherical tensor is given by
3.5. Transformation between Cartesian and spherical tensors
It is desirable to relate the components of a Cartesian tensor of rank n to their spherical counterparts
of degree jn, i.e. by a general transformation law of the form
and, conversely,
with the unitary condition
Note that the subscripts j1, j2, …,
are sometimes required to distinguish between different spherical tensors with the same degree jn; they can often be dropped all together where no ambiguity results. In particular, j1 is always one but is included in the notation for completeness.
For low-rank tensors of n = 0 (scalars) or n = 1 (vectors), the transformation to spherical tensors is straightforward and unambiguous since the tensors are already irreducible. In the case of scalars the transformation is the identity Vector quantities can be expressed either in a Cartesian basis
with directions
or in a spherical basis
with
The unitary transformation
between bases is given by
or equivalently
Note that a direct computation shows
i.e. the Euclidean dot product of vectors is, up to a constant, equal to the scalar product of spherical tensors of degree
(cf. EquationEquation (29)
(29)
(29) ).
For higher-order tensors, the transformation coefficients can be calculated recursively (cf. [Citation33,Citation34]) by the relation
where
are the Clebsch–Gordan coefficients. In particular, the transformation coefficients for n = 2 are given by
i.e. the components of a spherical tensor of degrees
are given in terms of the Cartesian tensor components Tαβ by the formulae:
(30)
(30)
Note that this corresponds to the decomposition of 2-tensors into the direct sum of SO(3)-invariant subspaces represented by the trace the antisymmetric matrices
and the traceless symmetric matrices
In fact, for the scalar product of spherical tensors of degree 2, we have
whenever the Cartesian tensors Sαβ and Tαβ of rank two are symmetric and traceless.
4. Transformation between Cartesian and spherical representations of SO(3)-invariant integrand expansions
As the space of symmetric traceless 2-tensors forms an irreducible subspace under the action of SO(3) by conjugation, the spherical components of the 2-tensor’s Cartesian components Qαβ () form a quadrupole tensor
(i.e. a spherical tensor of degree 2). From EquationEquation (30)
(30)
(30) the spherical tensor’s components
(
) are given by
(31)
(31)
with
The spherical components of the vector operator
(
) forms a dipole vector operator
(i.e. a spherical tensor of degree 1) with components
(
) given by
(32)
(32)
The action of the dipole vector operator on the quadrupole tensor
is given by the tensor product
The decomposition of this tensor product (cf. the spherical tensor product formula of EquationEquation (28)
(28)
(28) ) yields spherical tensors
of degrees L = 1, 2, three with components given by the formula
(33)
(33)
Our objective is to rewrite these spherical tensor components in terms of (i.e. the partial derivatives of the Q-tensor in the original Cartesian coordinates). In order to do so, we introduce the notational abbreviation
(34)
(34)
with
and
Then, by plugging the Equations (Equation32
(32)
(32) ) and (Equation31
(31)
(31) ) into the right-hand side of EquationEquation (34)
(34)
(34) , a computation (cf. Appendix B.1) shows that the components
are given in terms of their Cartesian derivatives
by the expressions:
(35a)
(35a)
(35b)
(35b)
(35c)
(35c)
We now look to proving the results from Section 2 by exploiting the above relationships between Cartesian and spherical tensor representations.
4.1. Proof of Theorem 2.1
We exploit the fact that spherical tensor representations offer linearly independent invariants of the Q-tensor partial derivatives. Indeed, the scalar products given by EquationEquation (29)(29)
(29) of the spherical tensors
yield invariants of the form
(36)
(36)
By Equation (Equation25(25)
(25) ), the spherical tensors
also have the orthogonality property
Therefore, by rewriting expansion given by Equation (Equation1(1)
(1) ) as a linear combination of these invariants, i.e. by writing
(37)
(37)
the superelliptic condition of EquationEquation (10)
(10)
(10) is fulfilled whenever the constants
and
are positive (since the invariants
by the scalar product of Equation (Equation29
(29)
(29) )). All that remains is to relate the
constants to the original L1, L2, and L3 elliptic constants given in EquationEquation (1)
(1)
(1) .
For the Cartesian expansion of EquationEquation (1)(1)
(1) , we need to take into account the Q-tensor symmetry conditions, namely the traceless condition
and the symmetric condition
(which implies that
). Due to the symmetry requirements, we want to identify the lower triangle matrix elements of Q with the upper triangle matrix elements, i.e. we want to set Qyx = Qxy, Qzx = Qxz and Qzy = Qyz wherever this occurs. Furthermore, from the traceless condition, we want to also set
whenever this occurs. In which case the Cartesian expression of EquationEquation (1)
(1)
(1) can be considered as a quadratic polynomial in the variables
(38)
(38)
Indeed, a direct computation (cf. exprL2 in Appendix C.1) shows that the explicit expansion of EquationEquation (1)(1)
(1) as a polynomial in the variables in EquationEquation (38)
(38)
(38) takes the form
(39)
(39)
On the other hand, one can expand the right-hand side of EquationEquation (37)(37)
(37) by way of the spherical tensor product formula of Equation (Equation33
(33)
(33) ). This gives EquationEquation (37)
(37)
(37) as a quadratic polynomial in the variables given by EquationEquation (34)
(34)
(34) . Then by making the substitutions of Equation (35), a computation (cf. exprK2 in Appendix C.1) shows that the spherical tensor expansion in EquationEquation (37)
(37)
(37) – rewritten in terms of the Cartesian variables in EquationEquation (38)
(38)
(38) – takes the form
(40)
(40)
It is then possible to obtain a system of linear equations for the elliptic constants by comparing the coefficients of both polynomial expansions with respect to the common set of Cartesian variables in EquationEquation (38)(38)
(38) (cf. exprDcoeff Appendix C.1). By solving this system of equations we get
That is to say, the matrix transformation of is given by
(41)
(41)
One then concludes is strictly convex if and only if
Remark 4.1.
By taking the scalar product of with itself, one can rewrite
as a sum of squares (in spherical components). In fact, by exploiting the complex conjugate form of Equations (Equation29
(29)
(29) ) and (35) together with the transition matrix of EquationEquation (41)
(41)
(41) , we find that:
Hence, we see that the expansion given by EquationEquation (1)(1)
(1) can be explicitly factorized a sum of squares in Cartesian components.
4.2. Proof of Theorem 2.1 using Sylvester’s criterion
From Equation (Equation1(1)
(1) ), one can directly compute the Hessian matrix
with respect to the 15 variables listed in EquationEquation (38)
(38)
(38) . By Sylvester’s criterion, H is positive definite if and only if the leading principal minors are strictly positive. A computation (cf. Appendix C.1.1) shows the latter condition for the leading principal minors of H is equivalent to the inequalities:
(42)
(42)
where we denote
In particular, note that if then
Further elementary analysis then shows the inequalities of EquationEquation (42)(42)
(42) hold if and only if the inequalities of EquationEquation (11)
(11)
(11) hold.
4.3. Proof of Theorem 2.5
The expansion given by Equation (12) can be considered as a fourth-order polynomial in the variables Qαβ and
Our objective is to ascertain the convexity criteria by re-interpreting this expansion as a quadratic form. This is done by a transformation from Cartesian to spherical tensors before re-arranging the spherical expansion as a non-negative-definite quadratic form.
Part 1
We want to rewrite the expansion of Equation (Citation12), given by the Cartesian invariants of Equations (Equation1(1)
(1) ), (Equation2
(2)
(2) ), and (Equation6
(6)
(6) ), in terms of a spherical representation written out in terms of the spherical tensors
where we denote
for notational simplicity. Then by taking scalar products of these spherical tensors with themselves (using Equation (Equation29
(29)
(29) )), third and fourth-order polynomial invariants can be formed, namely those of 3rd order spherical invariants of the form
(43)
(43)
with
and 4th order spherical invariants of the form
(44)
(44)
with
and
Part 2
We need to identify all relevant choices of the parameters J, L, and M for which the invariants and
of Equations (Equation43
(43)
(43) ) and (Equation44
(44)
(44) ) are linearly independent.
For the expression given by EquationEquation (43)(43)
(43) , there is a total of nine possible parameter combinations. By writing out a linear combination of all these possibilities and solving
(45)
(45)
for the constants
a computation (cf. exprS3coeff and EquationEquation (63)
(63)
(63) in Appendix E.1) shows that
(46)
(46)
Hence, we conclude that the last three terms on the right-hand side of EquationEquation (45)(45)
(45) are linearly dependent on the first six terms. Therefore, we can equate the six linearly independent invariant of EquationEquation (2)
(2)
(2) with the first six linearly independent invariant on the right-hand side of EquationEquation (45)
(45)
(45) , i.e.
(47)
(47)
For the invariants there is a total of 23 possible parameter combinations (due to the fact that EquationEquation (44)
(44)
(44) is symmetric in L and M). By writing out a linear combination of all these possibilities and solving
(48)
(48)
for the constants
a computation (cf. exprS4coeff and EquationEquation (64)
(64)
(64) in Appendix E.2) shows that:
(49)
(49)
Hence, we conclude that the last 10 terms on the right-hand side of EquationEquation (48)(48)
(48) are linearly dependent on the first 13 terms. Since both the Cartesian and spherical invariants of the form
have the same full rank (cf. Appendix D.2 and E.2), we can equate the 13 linearly independent invariant of EquationEquation (6)
(6)
(6) with the first 13 linearly independent invariant on the right-hand side of EquationEquation (48)
(48)
(48) , i.e.
(50)
(50)
Part 3
We now want to compute:
The transition matrix
that defines the linear relationships between the constants Θi on the right-hand size of EquationEquation (47)
The transition matrix
In order to account for the symmetric and traceless Q-tensor conditions, we identify (in the same way as in the proof of Theorem 2.1) the lower triangle matrix elements of Qαβ with the upper triangle matrix elements and set This allows the Cartesian expansion in EquationEquation (2)
(2)
(2) to be treated as a polynomial in the (gradient) variables listed in EquationEquation (38)
(38)
(38) together with the five independent Q-tensor components
(51)
(51)
The explicit expansion of EquationEquation (2)(2)
(2) in terms of the variables in Equations (Equation38
(38)
(38) ) and (Equation51
(51)
(51) ) (after accounting for the Q-tensor symmetries) is given in Appendix C.2 by exprL3.
On the other hand, we can express the spherical expansion on the right-hand side of EquationEquation (47)(47)
(47) by way of the spherical tensor product decomposition of Equation (Equation28
(28)
(28) ). This gives the spherical expansion as a polynomial in the variables of EquationEquation (34)
(34)
(34) together with the five spherical components
(
). Then, by making the spherical-to-Cartesian substitutions (Equations (35) and (Equation31
(31)
(31) )), a computation (cf. exprK3 in Appendix C.2) allows one to rewrite the spherical expansion of EquationEquation (47)
(47)
(47) back in terms of the Cartesian components listing in Equations (Equation38
(38)
(38) ) and (Equation51
(51)
(51) ).
After making the substitutions of Equations (35) and (Equation31(31)
(31) ), both the original Cartesian expansion of EquationEquation (2)
(2)
(2) and the spherical expansion on the right-hand side of EquationEquation (47)
(47)
(47) are polynomials in the common set of variables listed in Equations (Equation38
(38)
(38) ) and (Equation51
(51)
(51) ). Thus one can compare coefficients between the form expression (given by exprL3 in Appendix C.2) and the latter expression (given by exprK3 in Appendix C.2). By solving the resulting system of linear equations (cf. A3mat in Appendix C.2), we obtain a matrix transform of
given by
(52)
(52)
Similarly, the Cartesian expansion in EquationEquation (6)(6)
(6) can be treated as a polynomial in the variables of Equations (Equation38
(38)
(38) ) and (Equation51
(51)
(51) ). An explicit expansion of this expression (after accounting for the Q-tensor symmetries) is given in Appendix C.3 by exprL4. On the other hand, we can express the spherical expansion on the right-hand side of EquationEquation (50)
(50)
(50) as a polynomial in the variables
and
(
and
). Then, by making the spherical-to-Cartesian substitutions (Equations (35) and (Equation31
(31)
(31) )), a computation (cf. exprK4 in Appendix C.3) allows one to rewrite the spherical expansion of EquationEquation (50)
(50)
(50) back in terms of the Cartesian components listing in Equations (Equation38
(38)
(38) ) and (Equation51
(51)
(51) ).
After making the substitutions of Equations (35) and (Equation31(31)
(31) ), both the original Cartesian expansion of EquationEquation (6)
(6)
(6) and the spherical expansion on the right-hand side of EquationEquation (50)
(50)
(50) are polynomials in the common set of variables listed in Equations (Equation38
(38)
(38) ) and (Equation51
(51)
(51) ). Thus one can compare coefficients between the form expression (given by exprL4 in Appendix C.3) and the latter expression (given by exprK4 in Appendix C.3). The resulting system of linear equations can be solved to give a transform matrix (cf. A4mat in Appendix C.3) for the map
of the form
(53)
(53)
Part 4
As we have now established the expansion of Equation (12) can be rewritten in terms of linearly independent spherical invariants in Equations (Equation47
(47)
(47) ) and (Equation50
(50)
(50) ), it is possible to interpret the spherical representation as a quadratic form, i.e. using EquationEquation (29)
(29)
(29) one can write the expression
of Equation (12) in the form
(54)
(54)
where we denote
and
(55a)
(55a)
(55b)
(55b)
(55c)
(55c)
(55d)
(55d)
Hence, the associated matrix representation for the quadratic form given by Equation (Equation54(54)
(54) ) is of a block diagonal form of order 11 given by
Note that the coefficients of the matrices are related to and
via Equations (Equation41
(41)
(41) ), (Equation52
(52)
(52) ), and (Equation53
(53)
(53) ). In particular,
Part 5
We can now conclude that the function is convex if and only if
(i.e. if
is non-negative-definite).¶ Note that the non-negative-definiteness of
is independent of the choice of basis. For the expansion given in Equation (Citation12), one could have easily chosen for the expression in Equation (Citation12) a different set of linearly independent Cartesian and spherical invariants of full rank. Moreover, the superelliptic condition of EquationEquation (10)
(10)
(10) holds whenever the conditions of EquationEquation (11)
(11)
(11) are additionally assumed to hold (i.e. if
also hold).
4.4. Proof of Corollary 2.10
As Equation (Equation29(29)
(29) ) takes the form of a scalar product, one could proceed from EquationEquation (54)
(54)
(54) by way of the polarization identity
By applying this identity to EquationEquation (54)(54)
(54) one can rewrite the integrand given by Equation (12) in the form
We then conclude that whenever the inequalities in EquationEquation (16)
(16)
(16) hold.
4.5. Proof of Corollary 2.6
We first note that the term
can be written as a linear combination of the other 13 linearly independent invariants of EquationEquation (6)
(6)
(6) . From EquationEquation (9)
(9)
(9) , these linear dependencies are:
(56)
(56)
We can then write each of the coefficients in terms of scalar multiples of N14 by way of the transition matrix
and the linear dependencies in EquationEquation (56)
(56)
(56) . Putting these equations together with the fact that
yields main-diagonal block matrices (Equation (55)) of the form
It is clear that and
have eigenvalues of opposite sign for any
Moreover, as the characteristic polynomial of
is of the form
with
it is also easy to see
has eigenvalues of opposite sign for any non-zero value of N14.
5. Generating all contractions of a given tensorial expression
In the expansion of the free energy functional, we seek the most general Ansatz that contains a specific set of Q-tensors and their derivatives. Whilst finding the most general SO(3)-invariant action for a particular Q-tensor expression is still tractable at lower orders, the problem becomes increasingly tedious and error-prone when considering higher-order invariants. To overcome this problem, we use the tensor computer algebra package xTras of [Citation12] (see xact.es/xtras for documentation) that was developed as a part of the suite of packages xAct. The packages xAct were originally designed for tensor computations in General Relativity. For our purposes here, in particular, the AllContractions command returns a list of all possible full contractions of a tensorial expression over its free indices by way of a brute-force-implementation. This allows us to easily generate the desired SO(3)-invariants of the Q-tensor needed for the expansions of the elastic free energy part of the Landau-de Gennes functional.
To start we load the xTras package in Mathematica then define a 3-dimensional manifold M that is equivalent to the 3-dimensional domain a metric which is used to contract the indices and a (covariant) derivative denoted by CD.
Get["xAct‘xTras’"]
DefManifold[M, 3, IndexRange[a, s]]
DefMetric[1, metric[-a, -b], CD, PrintAs -> "g"]
We then define a symmetric 2-tensor Qab before specifying that it is required to be traceless.
DefTensor[Q[-a, -b], M, Symmetric[-a, -b]];
Q/:Q[a, -(a)] = 0;
Q/:Q[-(a), a] = 0;
Equivalently one could use the following method to force the tensor to be traceless.
DefTensor[Q[-a, -b], M, Symmetric[-a, -b]];
QtrRule = MakeRule[Q[a, -a], 0, PatternIndices -> All,
MetricOn -> All];
AutomaticRules[Q, QtrRule];
We can now use the AllContractions command to find a list of all possible full contractions of the derivatives with itself, i.e. all the SO(3)-invariants of the form
AllContractions[CD[-a][Q[-b, -c]] * CD[-d][Q[-e, -f]]]
This gives us the three invariantsǁ
(58.1)
(58.1)
(58.2)
(58.2)
(58.3)
(58.3)
which correspond to the L1, L2, L3-terms of Equation (Equation1
(1)
(1) ).
To find all the SO(3)-invariants of the form we use:
AllContractions [CD[-a][Q[-b, -c]] * CD[-d][Q[-e, -f]] * Q[-i, -j]]
This gives us the 7 invariants
(59.1)
(59.1)
(59.2)
(59.2)
(59.3)
(59.3)
(59.4)
(59.4)
(59.5)
(59.5)
(59.6)
(59.6)
(59.7)
(59.7)
which correspond to the respective L1, L2, L3, L4, L5, and L6-terms of Equation (Equation2
(2)
(2) ) and the L7-term of EquationEquation (3)
(3)
(3) . In Appendix D.1, we confirm that the first six invariants of Equation (59) are linearly independent of each other and that the last invariant is linearly dependent on the first six invariants.
To find all the SO(3)-invariants of the form we use:
AllContractions [CD[-a][Q[-b, -c]] * CD[-d][Q[-e, -f]]
* Q[-i, -j] * Q[-k, -l]]
This gives us the 19 invariants:
(60.1)
(60.1)
(60.2)
(60.2)
(60.3)
(60.3)
(60.4)
(60.4)
(60.5)
(60.5)
(60.6)
(60.6)
(60.7)
(60.7)
(60.8)
(60.8)
(60.9)
(60.9)
(60.10)
(60.10)
(60.11)
(60.11)
(60.12)
(60.12)
(60.13)
(60.13)
(60.14)
(60.14)
(60.15)
(60.15)
(60.16)
(60.16)
(60.17)
(60.17)
(60.18)
(60.18)
(60.19)
(60.19)
We remark that the first 13 terms listed in Equation (60) correspond to those listed in [11, Equation (12c)]. It was also noted in [Citation11] that the term linearly dependent on these first 13 terms, however, the last five invariants listed in Equation (60) are absent in [Citation11]. In Appendix D.2, we confirm that the first 13 invariants listed in Equation (60) are linearly independent from each other, the last six invariants listed in Equation (60) are linearly independent from each other, but that the last six invariants are linearly dependent on the first 13 invariants.
Continuing in this way, one could also compute:
AllContractions[CD[-a][Q[-b, -c]]*CD[-d][Q[-e, -f]]
*Q[-i, -j]*Q[-k, -l]*Q[-m, -n]]
AllContractions[CD[-a][Q[-b, -c]]*CD[-d][Q[-e, -f]]
*Q[-i, -j]*Q[-k, -l]*Q[-m, -n]*Q[-p, -q]]
This gives 36 invariants of the form and 70 invariants of the form
6. Computational aspects concerning the Cartesian and spherical tensor calculations
The expansions of the various elastic energy functionals in this work have been carried out with the assistance of the computer algebra system of the Mathematica software package. The use of such a program is necessary when considering the sesquipedality of the series expansions. The following commentary aims to exploit the in-built function Coefficient[expr,form] that gives the coefficients of form in the polynomial expr (built from the tensor and its partial derivatives
). Additionally, the computation of the Clebsch–Gordan coefficients
is easily obtained from the in-built function ClebschGordan
6.1. The transformation between Cartesian and spherical representations of the first-order partial derivatives of the Q-tensor
We first define QdmatX to be the Jacobian matrix of first-order partial derivatives of the Q-tensor. The symbols
denote the partial derivatives
and the indices α, β, γ are equal to the different x, y, z Cartesian directions. We then let QtermsX be the outer product of QdmatX with itself. This outer product produces a list of the 225 possible terms of the form
QdmatX = {{Qxx,x,Qxx,y,Qxx,z}, {Qyy,x,Qyy,y,Qyy,z}, {Qxy,x,Qxy,y,Qxy,z},
{Qxz,x,Qxz,y,Qxz,z}, {Qyz,x,Qyz,y,Qyz,z}}
QtermsX = Flatten[Outer[Times, QdmatX, QdmatX]]
Next, we do the same for the spherical representation of the Q-tensor. In the spherical basis, we let the Jacobian matrix of first-order partial derivatives be denoted by QdmatS. The matrix elements QdmatS are denoted by the symbols which represent the m1th derivative of the m2-th component of the Q-tensor as per EquationEquation (34)
(34)
(34) . We likewise let QtermsS denote the outer product of QdmatS with itself.
QdmatS = Table[Qi,j, {i, -2, 2}, {j, -1, 1}] QtermsS = Flatten[Outer[Times, QdmatS, QdmatS]]
We now let As denote the dipole tensor of the gradient vector operator. The spherical components of As are related to their Cartesian form by EquationEquation (32)
(32)
(32) .
As = {An1, A0, Ap1} Ap1[F_]:= - (I * (D[F, {x}] + I * D[F, {y}]))/Sqrt[Citation2] An1[F_]:= (I * (D[F, {x}] - I * D[F, {y}]))/Sqrt[Citation2] A0[F_]:= I * D[F, {z}]
We let Qs denote the quadrupole tensor The spherical components of Qs are given in terms of their Cartesian form by EquationEquation (31)
(31)
(31) . Note that
are proxy functions for the respective Q-tensor components Qxx, Qyy, Qxy, Qxz, Qyz.
Qs = {Qn2, Qn1, Q0, Qp1, Qp2} Qp2 = − (Fa(x, y, z) − Fb(x, y, z) + 2iFc(x, y, z)); Qn2 = −
(Fa(x, y, z) − Fb(x, y, z) − 2iFc(x, y, z)); Qp1 = Fd(x, y, z) + iFe(x, y, z); Qn1 = −(Fd(x, y, z) − iFe(x, y, z)); Q0 =
(Fa(x, y, z) + Fb(x, y, z));
We now calculate how the dipole tensor acts on the quadrupole tensor
The tuple AsQsderiv computes the first-order partial derivatives
of EquationEquation (34)
(34)
(34) in terms of their Cartesian components. The Jacobian matrix of the proxy functions
is given by FdmatX and FQreplace replaces those partial derivatives from FdmatX with the respective
symbols given by QdmatX. We then get a list Qreplacements that tells us how each of the
from QdmatS in the spherical representation are related to the Cartesian partial derivatives
from QdmatX. The resulting list Qreplacements yields Equation (35).
AsQsderiv = Flatten[Table[As[[j + 2]][Qs[[i + 3]]], {i, -2, 2}, {j, -1, 1}]] alab = {a, b, c, d, e}; xlab = {x, y, z}; FdmatX = Table[D[Subscript[F, alab[[i]]][x, y, z], {xlab[[j]]}], {i,1,5}, {j,1,3}] FQreplace = Table[FdmatX[[i, j]] QdmatX[[i, j]], {i, 1, 5}, {j, 1, 3}] QconvertoX = Table[AsQsderiv[[i]]/. Flatten[FQreplace], {i, 1, 15}] Qreplacements = Table[Flatten[QdmatS][[i]]
QconvertoX[[i]], {i, 1, 15}]; TableForm[FullSimplify[Qreplacements]]
7. Computing transition matrices
In this section, we compute the matrices needed for EquationEquation (14)
(14)
(14) in the statement of Theorem 2.5.
7.1. Computing the transition matrix
We want to compare the Li-coefficients of the expansion of the functional given by the principal Equation (Equation1
(1)
(1) ) with the Λi-coefficients of the spherical tensor expansion ofEquationEquation (37)
(37)
(37) given in terms of EquationEquation (36)
(36)
(36) . This is done by explicitly computing the summations of both Equations (Equation1
(1)
(1) ) and (Equation37
(37)
(37) ) while taking into account the symmetries of the Q-tensor.
The expansion of Equation (Equation1(1)
(1) ) is considered as a polynomial in
and the spherical tensor expansion of EquationEquation (37)
(37)
(37) is considered as a polynomial in
We use the Qreplacements substitutions given by Equation (35) to rewrite the spherical tensor forms
in terms of their Cartesian
counterparts. This allows one to compare the coefficients of both polynomial expansions in a common Cartesian basis. The comparison between Equations (Equation1
(1)
(1) ) and (Equation37
(37)
(37) ) results in a system of linear equations for the coefficients. The latter system of linear equation can then be solved to obtain the matrix transformation of
To carry out this procedure in detail we start by explicitly computing the summations given in EquationEquation (1)(1)
(1) for a proxy tensor
L2t1 = L2t2 =
L2t3 =
As the Q-tensor is symmetric, we want to identify the lower triangular matrix elements with the upper triangular entries, i.e. we want to set Qyx = Qxy, Qzx = Qxz and Qzy = Qyz wherever this occurs. Since we identify the respective symmetries for the proxy tensor
by the following Tsymmetric list.
Tsymmetric = {T2,1,1 T1,2,1, T2,1,2
T1,2,2, T2,1,3
T1,2,3, T3,1,1
T1,3,1,T3,1,2
T1,3,2, T3,1,3
T1,3,3, T3,2,2
T2,3,2, T3,2,1
T2,3,1, T3,2,3
T2,3,3};
Having accounted for the symmetries, we can replace the proxy tensor elements
with the respective
elements using the list TconvertoQ. As the Q-tensor is also traceless, we additionally want to set
The latter is done by the substitutions TconvertoQtrless.
TconvertoQ = {T1,1,1 Qxx,x, T1,1,2
Qxx,y, T1,1,3
Qxx,z, T1,2,1
Qxy,x,T1,2,2
Qxy,y, T1,2,3
Qxy,z, T1,3,1
Qxz,x, T1,3,2
Qxz,y, T1,3,3
Qxz,z,T2,2,1
Qyy,x, T2,2,2
Qyy,y, T2,2,3
Qyy,z, T2,3,1
Qyz,x, T2,3,2
Qyz,y, T2,3,3
Qyz,z};
TconvertoQtrless = {T3,3,1 −(Qxx,x + Qyy,x), T3,3,2
−(Qxx,y + Qyy,y), T3,3,3
−(Qxx,z + Qyy,z)};
It is now possible to explicitly compute the expansion of the expression given by EquationEquation (1)(1)
(1) after accounting for the Q-tensor’s symmetric and traceless conditions. This computation gives an expansion exprL2 as a quadratic polynomial in terms of the variables listed in EquationEquation (38)
(38)
(38) (i.e. as a polynomial in the variables QtermsX). The resulting EquationEquation (39)
(39)
(39) is obtained by collects together terms involving the same powers.
exprL2 = L1 * L2t1 + L2 * L2t2 + L3 * L2t3 /. Tsymmetric /. Join[TconvertoQ,TconvertoQtrless];
Collect[Expand[exprL2], QtermsX]
We now turn out attention to the spherical tensor expansion of EquationEquation (37)(37)
(37) . First, we define dQ[L, M] to be the spherical tensor components
given by EquationEquation (33)
(33)
(33) . We then let K2S[L] be the expression
given by EquationEquation (36)
(36)
(36) .
dQ[L-, M-]:= ClebschGordan[{1, m1}, {2, m2}, {L, M}]
* QdmatS[[m2 + 3, m1 + 2]] K2S[L-]:= ClebschGordan[{L, M}, {L, -M}, {0, 0}]
* dQ[L, M] * dQ[L, -M]
The terms in EquationEquation (37)(37)
(37) can then be explicitly calculated and converted into the Cartesian tensor form by way of the Qreplacements substitutions. The resulting EquationEquation (40)
(40)
(40) is obtained by collects together terms involving the same powers of the variables listed in EquationEquation (38)
(38)
(38) .
exprK2 = k1 * K2S[1] + k2 * K2S[2] + k3 * K2S[3]/. Qreplacements; Collect[Expand[Simplify[exprK2]], QtermsX]
We now have the expansions exprK2 of EquationEquation (40)(40)
(40) and exprL2 of EquationEquation (39)
(39)
(39) as polynomials in the same QtermsX variables of EquationEquation (38)
(38)
(38) . Since we require these two expressions to be equal, we can find the coefficients of the polynomial exprK2 - exprL2 with respect to the variables QtermsX and set them to be zero. By solving the resulting system of linear equations, we obtain the transition matrix
given by EquationEquation (41)
(41)
(41) .
exprDcoeff = Union[Coefficient[exprK2 - exprL2, QtermsX]]; exprDcoeffeq = Table[exprDcoeff[[i]] == 0,
{i, 1, Length[exprDcoeff]}]; Expand[Solve[exprDcoeffeq, {k1, k2, k3}]]
7.1.1. Computing the leading principal minors of the Hessian matrix
Given the fact that we have explicitly computed exprL2 as a quadratic polynomial in the variables listed in QmatX, it is possible to check the result of Theorem 2.1 by a direct computation of the Hessian matrix of It then follows by Sylvester’s criterion that exprL2 is positive definite quadratic form if and only if the leading principal minors of Hes are positive definite (i.e. if each of the 15 terms in the list lpMinors are strictly positive). The resulting inequalities are listed in EquationEquation (42)
(42)
(42) .
Hes = (1/2) * D[exprL2, {Flatten[QdmatX], 2}]; lpMinors = Table[Det[Table[Hes[[i, j]], {i, 1, k}, {j, 1, k}]],
{k, 1, 15}]; Apply[And, Table[FullSimplify[lpMinors[[i]]] > 0, {i, 1, 15}]]
7.2. Computing the transition matrix
The basic technique for computing the transition matrix can also be applied to the higher-order expansions (Equations (Equation2
(2)
(2) ) and (Equation6
(6)
(6) )). In this section, we want to compare the expansion of Equation (Equation2
(2)
(2) ) with that of the spherical version (EquationEquation (47)
(47)
(47) ) in order to compute the transition matrix
given by EquationEquation (52)
(52)
(52) . To carry out this procedure we need to introduce a new proxy tensor
in addition to the
tensor of the previous section. This allows us to compute the terms of EquationEquation (2)
(2)
(2) as follows.
Since the Q-tensor is symmetric and traceless, we identify the respective symmetries for the proxy tensor by the list TsymmetricMat. We then make the respective Q-tensor substitutions by the list TconvertoQmat (which also accounts from the traceless condition).
TsymmetricMat = {T2,1 T1,2, T3,1
T1,3, T3,2
T2,3}; TconvertoQmat = {T1,1
Qxx, T1,2
Qxy, T1,3
Qxz,
T2,2 Qyy, T2,3
Qyz,T3,3
−(Qxx + Qyy)};
We can now explicitly compute the expansion of EquationEquation (2)(2)
(2) after accounting for the Q-tensor symmetries. This computation gives exprL3 as a polynomial in terms of the variables listed in Equations (Equation38
(38)
(38) ) and (Equation51
(51)
(51) ).
exprL3 = M1 * L3t1 + M2 * L3t2 + M3 * L3t3 + M4 * L3t4 + M5 * L3t5+ M6 * L3t6/. Join[Tsymmetric, TsymmetricMat]/. Join[TconvertoQ, TconvertoQmat]/. TconvertoQtrless;
The expression exprL3 is a polynomial in the 1125 possible variables of the form which we denote by the list QtermsX3.
QmatX = {Qxx,Qyy,Qxy,Qxz,Qyz}; QtermsX3 = Flatten[Outer[Times, QmatX, QdmatX, QdmatX]];
We now want to compute the spherical expansion of EquationEquation (47)(47)
(47) . In order to do so, the components
of the quadrapole tensor
are denoted by the list
Using Equation (Equation28
(28)
(28) ), we define QdQ[L, J, M] to be the tensor product
built from the quadrapole tensor
and the spherical tensors
of EquationEquation (33)
(33)
(33) . We then let I3S[J, L] be the invariants
given by EquationEquation (43)
(43)
(43) .
QmatS = Table[Qi, {i, -2, 2}]; QdQ[L-,J-,M-]:= ClebschGordan[{2, m1}, {L, m2}, {J, M}] * QmatS[[m1 + 3]] * dQ[L, m2] I3S[J-,L-]:=
ClebschGordan[{J, m}, {J, -m}, {0, 0}] * dQ[J, m] * QdQ[L, J, -m]
We also need the following QreplacementsMat given by EquationEquation (31)(31)
(31) (in addition to the Qreplacements of Equation (35)) so that the terms in Equation (Equation47
(47)
(47) ) can be converted back to a Cartesian tensor form.
QreplacementsMat =
It is then possible to compute Equation (Equation47(47)
(47) ) and convert the spherical expression into its Cartesian tensor form.
exprK3 = a1 * I3S[1, 1] + a2 * I3S[2, 1] + a3 * I3S[1, 3] + a4 * I3S[2, 2] + a5 * I3S[2, 3] + a6 * I3S[3, 3]/. Join[Qreplacements, QreplacementsMat];
As in the previous section, we can compare the expansion exprK3 with exprL3 as two polynomials in the variables given by the outer product QtermX3. By equating the coefficients of these polynomials and solve the resulting system of linear equations, one obtains the transformation matrix given in EquationEquation (52)
(52)
(52) .
exprD3coeff = Union[Flatten[Coefficient[exprK3 - exprL3, QtermsX3]]]; exprD3coeffeq = Table[exprD3coeff[[i]] == 0, {i, 1, Length[exprD3coeff]}]; acoeff = {a1, a2, a3, a4, a5, a6}; Mcoeff = {M1, M2, M3, M4, M5, M6}; A3soln = acoeff/. First[Solve[exprD3coeffeq, acoeff]]; A3mat = Normal[CoefficientArrays[A3soln, Mcoeff][[Citation2]]]; MatrixForm[A3mat]
7.3. Computing the transition matrix
For the fourth-order expansion, we want to compare the expansion given by EquationEquation (6)(6)
(6) with its spherical counterpart (EquationEquation (50)
(50)
(50) ) in order to calculate the transition matrix
To do so, we first introduce the following fourth-order linearly independent invariants written in terms of the proxy tensors
and
The expansion given by Equation (Equation6(6)
(6) ) can now be explicitly computed after taking into account the Q-tensor symmetries. The resulting expression exprL4 is a polynomial given in terms of the variables listed in Equations (Equation38
(38)
(38) ) and (Equation51
(51)
(51) ).
exprL4 = N1 * L4t1 + N2 * L4t2 + N3 * L4t3 + N4 * L4t4 + N5 * L4t5 + N6 * L4t6 + N7 * L4t7 + N8 * L4t8 + N9 * L4t9 + N10 * L4t10 + N11 * L4t11 + N12 * L4t12 + N13 * L4t13 /. Join[Tsymmetric, TsymmetricMat] /. Join[TconvertoQ, TconvertoQmat] /. TconvertoQtrless;
In particular, the expression exprL4 is a polynomial in the 5625 possible variables of the form given by the list QtermsX4.
QtermsX4 = Flatten[Outer[Times, QmatX, QmatX, QdmatX, QdmatX]];
We now want to compute the spherical expansion (EquationEquation (50)(50)
(50) ). We do this by letting I4S[L, M, J] be the spherical invariants
given by EquationEquation (44)
(44)
(44) .
I4S[L-, M-, J-]:= ClebschGordan[{J, m}, {J, -m}, {0, 0}]
* QdQ[L, J, m] * QdQ[M, J, -m]
We can now compute each of the terms in EquationEquation (50)(50)
(50) before converting the spherical components into their respective Cartesian tensor forms.
exprK4 = b1 * I4S[1, 1, 1] + b2 * I4S[1, 1, 2] + b3 * I4S[2, 2, 0] + b4 * I4S[2, 2, 1] + b5 * I4S[2, 2, 2] + b6 * I4S[3, 3, 1] + b7 * I4S[3, 3, 2] + b8 * I4S[3, 3, 3] + b9 * I4S[1, 2, 1] + b10 * I4S[1, 3, 1] + b11 * I4S[1, 3, 2] + b12 * I4S[2, 3, 1] + b13 * I4S[2, 3, 2]/. Join[Qreplacements, QreplacementsMat];
We then compare the expansions exprK4 with exprL4 as two polynomials in the variables given in QtermX4. By extracting the coefficients and solving the resulting system of linear equations, we obtain the transformation matrix given by EquationEquation (53)
(53)
(53) .
exprD4coeff = Union[Flatten[Coefficient[exprK4 - exprL4,
QtermsX4]]];
exprD4coeffeq = Table[exprD4coeff[[i]] == 0, {i, 1, Length[exprD4coeff]}]; bcoeff = {b1, b2, b3, b4, b5, b6, b7, b8, b9, b10, b11, b12, b13}; Ncoeff = {N1, N2, N3, N4, N5, N6, N7, N8, N9, N10, N11, N12, N13}; bsoln = bcoeff/. First[Expand[Solve[exprD4coeffeq, bcoeff]]]; A4mat = Normal[CoefficientArrays[bsoln, Ncoeff][[Citation2]]]; MatrixForm[A4mat]
8. Linear dependencies of Cartesian tensor invariants
In this section, we show that there is a maximum of six linearly independent invariants of the form and a maximum of thirteen linearly independent invariants of the form
with respect to the Cartesian coordinates.
8.1. Third-order Cartesian invariants of the form
To find the linear dependences between the seven invariants listed in Equation (59), we use the same method as was done in Appendix C. In order to do so, we first introduce the final term L3t7 listed in Equation (59) before once again accounting for the Q-tensor symmetries.
L3t7 = exprL3extra = M7 * L3t7 /. Join[Tsymmetric, TsymmetricMat] /. Join[TconvertoQ, TconvertoQmat] /. TconvertoQtrless;
Next, we can compare the difference between the expressions on the left and right-hand sides of EquationEquation (4)(4)
(4) (i.e. the expression exprL3extra and the previous expression exprL3 of Appendix C.2) as two polynomials in the 1125 possible variables of the form
(denote by the list QtermsX3). The desired linear dependencies (EquationEquation (5)
(5)
(5) ) are then obtained by solving the system of equations exprL3extracoeffeq for the coefficients with respect to said polynomial.
exprL3extracoeff = Union[Flatten[
Coefficient[exprL3extra − exprL3, QtermsX3]]];
exprL3extracoeffeq =
Table[exprL3extracoeff[[i]] == 0,
{i, 1, Length[exprL3extracoeff]}]; Solve[exprL3extracoeffeq, Mcoeff]
More information can be extracted by looking at the corresponding matrix matX3 of exprL3extracoeff with respect to In particular, we can compute the matrix rank of matX3 to confirm there is a maximum of six linearly independent invariants. The linear dependences of EquationEquation (5)
(5)
(5) can also be sought by reducing matX3 to row echelon form via Gaussian elimination.
McoeffAll = Union[Mcoeff, {M7}]; matX3 = Normal[CoefficientArrays[Drop[exprL3extracoeff, 1], McoeffAll][[Citation2]]]; Dimensions[matX3] MatrixRank[matX3] REmatX3 = MatrixForm[RowReduce[matX3][[1;; 6, 1;; 7]]]
The first six non-trivial rows of echelon matrix, i.e. the matrix REmatX3, are of the form:
(61)
(61)
8.2. Fourth-order Cartesian invariants of the form
To find the linear dependences between the 19 invariants listed in Equation (60), we use the same method as in the previous section. This is done by first writing out the last six the linearly depending term listed in Equation (60) before accounting for the Q-tensor symmetries.
exprL4extra = N14 * L4t14 + N15 * L4t15 + N16 * L4t16 + N17 * L4t17 + N18 * L4t18 + N19 * L4t19 /. Join[Tsymmetric, TsymmetricMat]/. Join[TconvertoQ, TconvertoQmat] /. TconvertoQtrless;
We can then compares the expression on the left and right-hand sides of EquationEquation (8)(8)
(8) (i.e. the expression exprL4extra and the previous expression exprL4 of Appendix C.3) as polynomials in the variables given by the list QtermsX4. By solving the resulting system of equations for the coefficients with respect to the variables
the desired linear dependencies (EquationEquation (9)
(9)
(9) ) are obtained.
exprL4extracoeff = Union[Flatten[
Coefficient[exprL4extra - exprL4, QtermsX4]]]; exprL4extracoeffeq = Table[exprL4extracoeff[[i]] == 0,
{i, 1, Length[exprL4extracoeff]}]; solnLD = Solve[exprL4extracoeffeq, Ncoeff]
It is easy to see from EquationEquation (9)(9)
(9) that
whenever
(i.e. the first 13 invariants are linearly independent of one another). On the other hand, by solving EquationEquation (9)
(9)
(9) with respect to
we confirm
whenever
(i.e. the last six invariants are linearly independent of one another). The latter claim can be confirmed with the following:
solnLDb = Ncoeff/. First[solnLD]; solnLDbeq = Table[solnLDb[[i]] == 0, {i, 1, Length[solnLDb]}]; Solve[solnLDbeq, {N14, N15, N16, N17, N18, N19}]
Rather than directly solving the set of linear equations exprL4extracoeffeq for the coefficients, one could look at the corresponding matrix matL4 with respect to We can then compute the matrix rank of matL4 to confirm that there is a maximum of 13 linearly independent invariants out of the 19 possibilities listed in Equation (60). The linear dependences of EquationEquation (9)
(9)
(9) can also be sought by reducing matL4 to row echelon form via Gaussian elimination.
NcoeffAll = Union[Ncoeff, {N14, N15, N16, N17, N18, N19}]; matL4 = Normal[CoefficientArrays[Drop[exprL4extracoeff, 1], NcoeffAll][[Citation2]]]; Dimensions[matL4] MatrixRank[matL4] REmatX4 = RowReduce[matL4][[1;; 13, 1;; 19]]
The first 13 non-trivial rows of the echelon matrix, i.e. the matrix REmatX4, are of the form:
(62)
(62)
9. Linear dependencies of spherical tensor invariants
In this section, we confirm that there is also six linearly independent invariants of the form and a maximum of thirteen linearly independent invariants of the form
for the spherical tensor representation of the Q-tensor.
9.1. Third-order spherical invariants of the form
Spherical tensor invariants of the form are given by EquationEquation (43)
(43)
(43) . Due to EquationEquation (24)
(24)
(24) , both J and L can only take the values in the set {1, 2, 3}. Hence there is a total of nine possible terms. A linear combination of these invariants is given by exprS3.
exprS3 = a1 * I3S[1, 1] + a2 * I3S[2, 1] + a3 * I3S[1, 3]
+ a4 * I3S[2, 2] + a5 * I3S[2, 3] + a6 * I3S[3, 3]
+ a7 * I3S[1, 2] + a8 * I3S[3, 1] + a9 * I3S[3, 2];
Next, we want to solve EquationEquation (45)(45)
(45) to find the linear dependencies between the spherical invariants (EquationEquation (43)
(43)
(43) ). Equation (Equation45
(45)
(45) ) can be thought of as a polynomial in the 1125 possible variables QtermsS3 of the form
for
and
The desired linear dependencies (EquationEquation (46)
(46)
(46) ) are then obtained by solving the system of equations exprS3coeffeq for the coefficients of the polynomial exprS3.
QtermsS3 = Flatten[Outer[Times, QmatS, QdmatS, QdmatS]]; exprS3coeff = Union[Flatten[Coefficient[exprS3, QtermsS3]]]; exprS3coeffeq = Table[exprS3coeff[[i]] == 0, {i, 1, Length[exprS3coeff]}]; Solve[exprS3coeffeq, acoeff]
More information can be extracted by looking at the corresponding matrix matS3 of exprS3extracoeff with respect to the seven coefficients of exprS3. In particular, we can compute the matrix rank of matS3 to confirm there is a maximum of six linearly independent invariants. The linear dependences of EquationEquation (46)(46)
(46) can also be sought by reducing matS3 to row echelon form via Gaussian elimination.
acoeffall = Union[acoeff, {a7, a8, a9}]; matS3 = Normal[CoefficientArrays[Drop[exprS3coeff, 1],
acoeffall][[Citation2]]]; Dimensions[matS3] MatrixRank[matS3] REmatS3 = MatrixForm[RowReduce[matS3][[1;; 6, 1;; 9]]]
The first six non-trivial rows of echelon matrix, i.e. the matrix REmatS3, are of the form:
(63)
(63)
9.2. Fourth-order spherical invariants of the form
Spherical tensor invariants of the form are given by EquationEquation (44)
(44)
(44) . Since the expression (Equation44
(44)
(44) ) is symmetric in L and M, we have
and
by the rule in EquationEquation (24)
(24)
(24) . Hence there is a total of 23 possible terms. A linear combination of these invariants is given by exprS4.
LMJs = {{1, 1, 1}, {1, 1, 2}, {2, 2, 0}, {2, 2, 1}, {2, 2, 2}, {3, 3, 1}, {3, 3, 2}, {3, 3, 3}, {1, 2, 1}, {1, 3, 1}, {1, 3, 2}, {2, 3, 1}, {2, 3, 2}, {1, 1, 3}, {1, 2, 2}, {1, 2, 3}, {1, 3, 3}, {2, 2, 3}, {2, 2, 4}, {2, 3, 3}, {2, 3, 4}, {3, 3, 4}, {3, 3, 5}}; exprS4 = Total[Table[ Subscript[b, j]
* I4S[LMJs[[j]][[Citation1]], LMJs[[j]][[Citation2]], LMJs[[j]][[Citation3]]], {j, 1, Length[LMJs]g]];
Next, we want to solve EquationEquation (48)(48)
(48) to find the linear dependencies between the spherical invariants in EquationEquation (44)
(44)
(44) . Equation (Equation48
(48)
(48) ) can be thought of as a polynomial in the 5625 possible variables QtermsS4 of the form
for
and
The desired linear dependencies (EquationEquation (49)
(49)
(49) ) are then obtained by solving the system of equations exprS4coeffeq for the coefficients of the polynomial exprS4.
QtermsS4 = Flatten[Outer[Times, QmatS, QmatS, QdmatS, QdmatS]]; bcoeff13 = Table[Subscript[b, j], {j, 1, 13}]; exprS4coeff = Union[Flatten[Coefficient[exprS4, QtermsS4]]]; exprS4coeffeq = Table[exprS4coeff[[i]] == 0, {i, 1, Length[exprS4coeff]}]; solnS4 = Solve[exprS4coeffeq, bcoeff13]
Alternatively, the linear dependences can be found by looking at the corresponding matrix matS4 for the set of linear equations exprS4extracoeffeq with respect to the 23 constants. We can then compute the matrix rank of matS4 to confirm that there is a maximum of 13 linearly independent invariants out of the 23 possible invariants (EquationEquation (44)(44)
(44) ). The linear dependences of EquationEquation (49)
(49)
(49) can also be sought by reducing matS4 to row echelon form via Gaussian elimination.
bcoeffall = Table[Subscript[b, j], {j, 1, 23}]; matS4 = Normal[CoefficientArrays[Drop[exprS4coeff, 1],
bcoeffall][[Citation2]]]; Dimensions[matS4] MatrixRank[matS4] REmatS4 = MatrixForm[RowReduce[matS4][[1;; 13, 1;; 23]]]
The first 13 non-trivial rows of the echelon matrix, i.e. the matrix REmatS4, are of the form of the 13 × 23 matrix
where I13 is the 13 × 13 identity matrix and B is the 13 × 10 matrix of the form:
(64)
(64)
10.1. One generating all contractions of a given tensorial expression
The following code yields the invariants in Equations (59) and (60).
Listing 1: Generating all contractions of a given tensorial expression
Get["xAct‘xTras‘"] DefManifold[M, 3, IndexRange[a, s]] DefMetric[1, metric[-a, -b], CD, PrintAs -> "g"] DefTensor[Q[-a, -b], M, Symmetric[{-a, -b}]]; Q/: Q[a_, -(a_)] = 0; Q/: Q[-(a_), a_] = 0; AllContractions[Q[-a, -b]*Q[-c, -d]] AllContractions[CD[-a][Q[-b, -c]]*CD[-d][Q[-e, -f]]] AllContractions[CD[-a][Q[-b, -c]]*CD[-d][Q[-e, -f]]*Q[-i, -j]] AllContractions[CD[-a][Q[-b, -c]]*CD[-d][Q[-e, -f]]*Q[-i, -j]*Q[-k, -l]] AllContractions[CD[-a][Q[-b, -c]]*CD[-d][Q[-e, -f]]*Q[-i, -j]*Q[-k, -l]*Q[-m, -n]] AllContractions[CD[-a][Q[-b, -c]]*CD[-d][Q[-e, -f]]*Q[-i, -j]*Q[-k, -l]*Q[-m, -n]*Q[-p, -q]]
10.2. Computational aspects concerning the Cartesian and spherical tensor calculations
The following code computes Equation (35).
Listing 2: The transformation between Cartesian and spherical representations of the first-order partial derivatives of the Q-tensor
QdmatX = {{Subscript[Q,xx,x], Subscript[Q,xx,y], Subscript[Q,xx,z]}, {Subscript[Q,yy,x], Subscript[Q,yy,y], Subscript[Q,yy,z]}, {Subscript[Q,xy,x], Subscript[Q,xy,y], Subscript[Q,xy,z]}, {Subscript[Q,xz,x], Subscript[Q,xz,y], Subscript[Q,xz,z]}, {Subscript[Q,yz,x], Subscript[Q,yz,y], Subscript[Q,yz,z]}}; QtermsX = Flatten[Outer[Times, QdmatX, QdmatX]]; QdmatS = Table[Subscript[Q, i, j], {i, -2, 2}, {j, -1, 1}]; QtermsS = Flatten[Outer[Times, QdmatS, QdmatS]]; As = {An1, A0, Ap1}; Ap1[F_]:= -((I*(D[F, {x}] + I*D[F, {y}]))/Sqrt[Citation2]); An1[F_]:= (I*(D[F, {x}] - I*D[F, {y}]))/Sqrt[Citation2]; A0[F_]:= I*D[F, {z}]; Qs = {Qn2, Qn1, Q0, Qp1, Qp2}; Qp2 = -(Subscript[F, a][x, y, z] - Subscript[F, b][x, y, z] + 2*I*Subscript[F, c][x, y, z])/2; Qn2 = -(Subscript[F, a][x, y, z] - Subscript[F, b][x, y, z] - 2*I*Subscript[F, c][x, y, z])/2; Qp1 = Subscript[F, d][x, y, z] + I*Subscript[F, e][x, y, z]; Qn1 = -(Subscript[F, d][x, y, z] - I*Subscript[F, e][x, y, z]); Q0 = Sqrt[Citation3]*(Subscript[F, a][x, y, z] + Subscript[F, b][x, y, z])/Sqrt[Citation2]; AsQsderiv = Flatten[Table[As[[j + 2]][Qs[[i + 3]]], {i, -2, 2}, {j, -1, 1}]]; alab = {a, b, c, d, e}; xlab = {x, y, z}; FdmatX = Table[D[Subscript[F, alab[[i]]][x, y, z], {xlab[[j]]}], {i, 1, 5}, {j, 1, 3}]; FQreplace = Table[FdmatX[[i,j]] -> QdmatX[[i,j]], {i, 1, 5}, {j, 1, 3}]; QconvertoX = Table[AsQsderiv[[i]]/. Flatten[FQreplace], {i, 1, 15}]; Qreplacements = Table[Flatten[QdmatS][[i]] -> QconvertoX[[i]], {i, 1, 15}]; TableForm[FullSimplify[Qreplacements]]
10.3. Computing transition matrices
The following code computes Equations (Equation39(39)
(39) ) and (Equation40
(40)
(40) ) as well as the transition matrices (Equations (Equation41
(41)
(41) ), (Equation52
(52)
(52) ), and (Equation53
(53)
(53) )).
Listing 3: Computing the transition matrix
L2t1 = Sum[Subscript[T, j, k, i]*Subscript[T, j, k, i], {k, 1, 3}, {j, 1, 3}, {i, 1, 3}]; L2t2 = Sum[Subscript[T, i, k, i]*Subscript[T, j, k, j], {k, 1, 3}, {j, 1, 3}, {i, 1, 3}]; L2t3 = Sum[Subscript[T, i, k, j]*Subscript[T, j, k, i], {k, 1, 3}, {j, 1, 3}, {i, 1, 3}]; Tsymmetric = {Subscript[T,2,1,1] -> Subscript[T,1,2,1], Subscript[T,2,1,2] -> Subscript[T,1,2,2], Subscript[T,2,1,3] -> Subscript[T,1,2,3], Subscript[T,3,1,1] -> Subscript[T,1,3,1], Subscript[T,3,1,2] -> Subscript[T,1,3,2], Subscript[T,3,1,3] -> Subscript[T,1,3,3], Subscript[T,3,2,2] -> Subscript[T,2,3,2], Subscript[T,3,2,1] -> Subscript[T,2,3,1], Subscript[T,3,2,3] -> Subscript[T,2,3,3]}; TconvertoQ = {Subscript[T, 1, 1, 1] -> Subscript[Q, xx, x], Subscript[T, 1, 1, 2] -> Subscript[Q, xx, y], Subscript[T, 1, 1, 3] -> Subscript[Q, xx, z], Subscript[T, 1, 2, 1] -> Subscript[Q, xy, x], Subscript[T, 1, 2, 2] -> Subscript[Q, xy, y], Subscript[T, 1, 2, 3] -> Subscript[Q, xy, z], Subscript[T, 1, 3, 1] -> Subscript[Q, xz, x], Subscript[T, 1, 3, 2] -> Subscript[Q, xz, y], Subscript[T, 1, 3, 3] -> Subscript[Q, xz, z], Subscript[T, 2, 2, 1] -> Subscript[Q, yy, x], Subscript[T, 2, 2, 2] -> Subscript[Q, yy, y], Subscript[T, 2, 2, 3] -> Subscript[Q, yy, z], Subscript[T, 2, 3, 1] -> Subscript[Q, yz, x], Subscript[T, 2, 3, 2] -> Subscript[Q, yz, y], Subscript[T, 2, 3, 3] -> Subscript[Q, yz, z]}; TconvertoQtrless = {Subscript[T, 3, 3, 1] -> -(Subscript[Q, xx, x] + Subscript[Q, yy, x]), Subscript[T, 3, 3, 2] -> -(Subscript[Q, xx, y] + Subscript[Q, yy, y]), Subscript[T, 3, 3, 3] -> -(Subscript[Q, xx, z] + Subscript[Q, yy, z])}; exprL2 = L1 * L2t1 + L2 * L2t2 + L3 * L2t3 /. Tsymmetric/. Join[TconvertoQ, TconvertoQtrless]; Collect[Expand[exprL2], QtermsX] dQ[L_, M_]:= Sum[QdmatS[[m2 + 3,m1 + 2]] *ClebschGordan[{1,m1},{2,m2},{L,M}], {m1,-1,1}, {m2,-2,2}]; K2S[L_]:= Sum[dQ[L,M]*dQ[L,-M] *ClebschGordan[{L,M},{L,-M},{0,0}], {M,-L,L}]; exprK2 = k1 * K2S[1] + k2 * K2S[2] + k3 * K2S[3]/. Qreplacements; Collect[Expand[Simplify[exprK2]], QtermsX] exprDcoeff = Union[Coefficient[exprK2 - exprL2, QtermsX]]; exprDcoeffeq = Table[exprDcoeff[[i]] == 0, {i, 1, Length[exprDcoeff]}]; Expand[Solve[exprDcoeffeq, {k1, k2, k3}]]
Listing 4: Computing the transition matrix
L3t1 = Sum[Subscript[T, j, i, i]*Subscript[T, k, l]*Subscript[T, k, l, j], {l,1,3}, {k,1,3}, {j,1,3}, {i,1,3}]; L3t2 = Sum[Subscript[T, j, i, i]*Subscript[T, k, l]*Subscript[T, k, j, l], {l,1,3}, {k,1,3}, {j,1,3}, {i,1,3}]; L3t3 = Sum[Subscript[T, l, i, i]*Subscript[T, k, j, j]*Subscript[T, k, l], {l,1,3}, {k,1,3}, {j,1,3}, {i,1,3}]; L3t4 = Sum[Subscript[T, k, l]*Subscript[T, k, i, j]*Subscript[T, l, i, j], {l,1,3}, {k,1,3}, {j,1,3}, {i,1,3}]; L3t5 = Sum[Subscript[T, k, l]*Subscript[T, k, i, j]*Subscript[T, l, j, i], {l,1,3}, {k,1,3}, {j,1,3}, {i,1,3}]; L3t6 = Sum[Subscript[T, k, l]*Subscript[T, k, i, j]*Subscript[T, i, j, l], {l,1,3}, {k,1,3}, {j,1,3}, {i,1,3}]; TsymmetricMat = {Subscript[T, 2, 1] -> Subscript[T, 1, 2], Subscript[T, 3, 1] -> Subscript[T, 1, 3], Subscript[T, 3, 2] -> Subscript[T, 2, 3]}; TconvertoQmat = {Subscript[T, 1, 1] -> Subscript[Q, xx], Subscript[T, 1, 2] -> Subscript[Q, xy], Subscript[T, 1, 3] -> Subscript[Q, xz], Subscript[T, 2, 2] -> Subscript[Q, yy], Subscript[T, 2, 3] -> Subscript[Q, yz], Subscript[T, 3, 3] -> -(Subscript[Q, xx] + Subscript[Q, yy])}; exprL3 = M1 * L3t1 + M2 * L3t2 + M3 * L3t3 + M4 * L3t4 + M5 * L3t5 + M6 * L3t6 /.Join[Tsymmetric, TsymmetricMat] /. Join[TconvertoQ, TconvertoQmat] /. TconvertoQtrless; QmatX = {Subscript[Q,xx], Subscript[Q,yy], Subscript[Q,xy], Subscript[Q,xz], Subscript[Q,yz]}; QtermsX3 = Flatten[Outer[Times, QmatX, QdmatX, QdmatX]]; QmatS = Table[Subscript[Q, i], {i, -2, 2}]; QdQ[L_, J_, M_]:= Sum[dQ[L, m2] * QmatS[[m1 + 3]] * ClebschGordan[{2, m1}, {L, m2}, {J, M}], {m1, -2, 2},{m2, -L, L}]; I3S[J_, L_]:= Sum[dQ[J, m] * QdQ[L, J, -m] * ClebschGordan[{J, m}, {J, -m}, {0, 0}], {m, -J, J}]; QreplacementsMat = {Subscript[Q, -2] -> (1/2)*(-Subscript[Q, xx] + 2*I*Subscript[Q, xy] + Subscript[Q, yy]), Subscript[Q, -1] -> -Subscript[Q, xz] + I*Subscript[Q, yz], Subscript[Q, 0] -> Sqrt[3/2]*(Subscript[Q, xx] + Subscript[Q, yy]), Subscript[Q, 1] -> Subscript[Q, xz] + I*Subscript[Q, yz], Subscript[Q, 2] -> (1/2)*(-Subscript[Q, xx] - 2*I*Subscript[Q, xy] + Subscript[Q, yy])}; exprK3 = a1 * I3S[1, 1] + a2 * I3S[2, 1] + a3 * I3S[1, 3] +a4 * I3S[2, 2] + a5 * I3S[2, 3] + a6 * I3S[3, 3] /.Join[Qreplacements, QreplacementsMat]; exprD3coeff = Union[Flatten[ Coefficient[exprK3 - exprL3, QtermsX3]]]; exprD3coeffeq = Union[Table[exprD3coeff[[i]] == 0, {i, 1, Length[exprD3coeff]}]]; acoeff = {a1, a2, a3, a4, a5, a6}; Mcoeff = {M1, M2, M3, M4, M5, M6}; A3soln = acoeff/. First[Solve[exprD3coeffeq, acoeff]]; A3mat = Normal[CoefficientArrays[A3soln, Mcoeff][[Citation2]]]; MatrixForm[A3mat]
Listing 5: Computing the transition matrix
L4t1 = Sum[Subscript[T,j,i,i]*Subscript[T,k,j,k] *Subscript[T,l,m]*Subscript[T,m,l], {m,1,3},{l,1,3},{k,1,3},{j,1,3},{i,1,3}]; L4t2 = Sum[Subscript[T,l,m]*Subscript[T,m,l] *Subscript[T,i,j,k]*Subscript[T,i,j,k], {m,1,3},{l,1,3},{k,1,3},{j,1,3},{i,1,3}]; L4t3 = Sum[Subscript[T,l,m]*Subscript[T,m,l] *Subscript[T,i,j,k]*Subscript[T,k,i,j], {m,1,3},{l,1,3},{k,1,3},{j,1,3},{i,1,3}]; L4t4 = Sum[Subscript[T,i,m]*Subscript[T,m,j] *Subscript[T,k,l,l]*Subscript[T,i,j,k], {m,1,3},{l,1,3},{k,1,3},{j,1,3},{i,1,3}]; L4t5 = Sum[Subscript[T,i,m]*Subscript[T,m,j] *Subscript[T,k,l,l]*Subscript[T,i,k,j], {m,1,3},{l,1,3},{k,1,3},{j,1,3},{i,1,3}]; L4t6 = Sum[Subscript[T,i,k,k]*Subscript[T,i,m] *Subscript[T,j,l,l]*Subscript[T,m,j], {m,1,3},{l,1,3},{k,1,3},{j,1,3},{i,1,3}]; L4t7 = Sum[Subscript[T,i,m]*Subscript[T,j,m] *Subscript[T,i,k,l]*Subscript[T,j,k,l], {m,1,3},{l,1,3},{k,1,3},{j,1,3},{i,1,3}]; L4t8 = Sum[Subscript[T,i,m]*Subscript[T,m,j] *Subscript[T,i,k,l]*Subscript[T,j,l,k], {m,1,3},{l,1,3},{k,1,3},{j,1,3},{i,1,3}]; L4t9 = Sum[Subscript[T,i,m]*Subscript[T,m,j] *Subscript[T,i,k,l]*Subscript[T,k,l,j], {m,1,3},{l,1,3},{k,1,3},{j,1,3},{i,1,3}]; L4t10 = Sum[Subscript[T,i,j]*Subscript[T,k,l] *Subscript[T,l,m,m]*Subscript[T,j,k,i], {m,1,3},{l,1,3},{k,1,3},{j,1,3},{i,1,3}]; L4t11 = Sum[Subscript[T,i,j]*Subscript[T,k,l] *Subscript[T,k,m,i]*Subscript[T,l,m,j], {m,1,3},{l,1,3},{k,1,3},{j,1,3},{i,1,3}]; L4t12 = Sum[Subscript[T,i,j]*Subscript[T,k,l] *Subscript[T,i,j,m]*Subscript[T,m,l,k], {m,1,3},{l,1,3},{k,1,3},{j,1,3},{i,1,3}]; L4t13 = Sum[Subscript[T,i,j]*Subscript[T,k,l] *Subscript[T,i,j,m]*Subscript[T,k,l,m], {m,1,3},{l,1,3},{k,1,3},{j,1,3},{i,1,3}]; exprL4 = N1 * L4t1 + N2 * L4t2 + N3 * L4t3 + N4 * L4t4 + N5 * L4t5 +N6 * L4t6 + N7 * L4t7 + N8 * L4t8 + N9 * L4t9 + N10 * L4t10+N11 * L4t11 + N12 * L4t12 + N13 * L4t13 /. Join[Tsymmetric,TsymmetricMat] /. Join[TconvertoQ,TconvertoQmat] /. TconvertoQtrless; I4S[L_, M_, J_]:=Sum[QdQ[L, J, m] * QdQ[M, J, -m] * ClebschGordan[{J, m}, {J, -m}, {0, 0}], {m, -J, J}] exprK4 = b1 * I4S[1,1,1] + b2 * I4S[1,1,2] + b3 * I4S[2,2,0] + b4 * I4S[2,2,1] +b5 * I4S[2,2,2] + b6 * I4S[3,3,1] + b7 * I4S[3,3,2] + b8 * I4S[3,3,3] +b9 * I4S[1,2,1] + b10 * I4S[1,3,1] + b11 * I4S[1,3,2] + b12 * I4S[2,3,1] +b13 * I4S[2,3,2] /. Join[Qreplacements, QreplacementsMat]; QtermsX4 = Flatten[Outer[Times, QmatX, QmatX, QdmatX, QdmatX]]; exprD4coeff = Union[Flatten[ Coefficient[exprK4 - exprL4, QtermsX4]]]; exprD4coeffeq = Table[exprD4coeff[[i]] == 0, {i, 1, Length[exprD4coeff]}]; bcoeff = {b1, b2, b3, b4, b5, b6, b7, b8, b9, b10, b11, b12, b13}; Ncoeff = {N1, N2, N3, N4, N5, N6, N7, N8, N9, N10, N11, N12, N13}; bsoln = bcoeff /. First[Expand[Solve[exprD4coeffeq, bcoeff]]]; A4mat = Normal[CoefficientArrays[bsoln, Ncoeff][[Citation2]]]; MatrixForm[A4mat]
10.4. Linear dependencies of Cartesian tensor invariants
The following code computes the linear dependences (EquationEquation (5)(5)
(5) ) and shows that the system of linear equations for the coefficients associated with EquationEquation (4)
(4)
(4) has a rank equal to 6.
Listing 6: Linear dependencies of third-order Cartesian tensor invariants of the form
L3t7 = Sum[Subscript[T, k, l]*Subscript[T, i, j, k]*Subscript[T, i, j, l], {l, 1, 3}, {k, 1, 3}, {j, 1, 3}, {i, 1, 3}]; exprL3extra = M7 * L3t7/. Join[Tsymmetric, TsymmetricMat] /. Join[TconvertoQ, TconvertoQmat]/. TconvertoQtrless; exprL3extracoeff = Union[Flatten[ Coefficient[exprL3extra - exprL3, QtermsX3]]]; exprL3extracoeffeq = Table[exprL3extracoeff[[i]] == 0, {i, 1, Length[exprL3extracoeff]}]; Solve[exprL3extracoeffeq, Mcoeff] McoeffAll = Union[Mcoeff, {M7}]; matX3 = Normal[CoefficientArrays[Drop[exprL3extracoeff, 1], McoeffAll][[Citation2]]]; Dimensions[matX3] MatrixRank[matX3] REmatX3 = MatrixForm[RowReduce[matX3][[1;; 6, 1;; 7]]]
The following computes the linear dependences (EquationEquation (9)(9)
(9) ) and shows that the system of linear equations for the coefficients associated with EquationEquation (8)
(8)
(8) has a rank equal to 13.
Listing 7: Linear dependencies of fourth-order Cartesian tensor invariants of the form
L4t14 = Sum[Subscript[T, k, m]*Subscript[T, m, l] *Subscript[T, i, j, k]*Subscript[T, i, j, l], {m,1,3},{l,1,3},{k,1,3},{j,1,3},{i,1,3}]; L4t15 = Sum[Subscript[T, i, j]*Subscript[T, k, l] *Subscript[T, l, m,j]*Subscript[T, i, m, k], {m,1,3},{l,1,3},{k,1,3},{j,1,3},{i,1,3}]; L4t16 = Sum[Subscript[T, i, j]*Subscript[T, k, l] *Subscript[T, i, m,j]*Subscript[T, k, m, l], {m,1,3},{l,1,3},{k,1,3},{j,1,3},{i,1,3}]; L4t17 = Sum[Subscript[T, i, j]*Subscript[T, k, l] *Subscript[T, i, j,k]*Subscript[T, l, m, m], {m,1,3},{l,1,3},{k,1,3},{j,1,3},{i,1,3}]; L4t18 = Sum[Subscript[T, i, j]*Subscript[T, k, l] *Subscript[T, j, m, l]*Subscript[T, i, k, m], {m,1,3},{l,1,3},{k,1,3},{j,1,3},{i,1,3}]; L4t19 = Sum[Subscript[T, i, j]*Subscript[T, k, l] *Subscript[T, j, l, m]*Subscript[T, i, k, m], {m,1,3},{l,1,3},{k,1,3},{j,1,3},{i,1,3}]; exprL4extra = N14 * L4t14 + N15 * L4t15 + N16 * L4t16 + N17 * L4t17 + N18 * L4t18 + N19 * L4t19 /.Join[Tsymmetric, TsymmetricMat] /. Join[TconvertoQ, TconvertoQmat] /. TconvertoQtrless; exprL4extracoeff = Union[Flatten[Coefficient[exprL4extra - exprL4, QtermsX4]]]; exprL4extracoeffeq = Table[exprL4extracoeff[[i]] == 0, {i, 1, Length[exprL4extracoeff]}]; solnL4 = Solve[exprL4extracoeffeq, Ncoeff] solnL4b = Ncoeff/. First[solnL4]; solnL4beq = Table[solnL4b[[i]] == 0, {i, 1, Length[solnL4b]}]; Solve[solnL4beq, {N14, N15, N16, N17, N18, N19}] NcoeffAll = Union[Ncoeff, {N14, N15, N16, N17, N18, N19}]; matX4 = Normal[CoefficientArrays[Drop[exprL4extracoeff, 1], NcoeffAll][[Citation2]]]; Dimensions[matX4] MatrixRank[matX4] REmatX4 = MatrixForm[RowReduce[matX4][[1;; 13, 1;; 19]]]
10.5. Linear dependencies of spherical tensor invariants
The following code computes the linear dependences (EquationEquation (46)(46)
(46) ) and shows that the system of linear equations for the coefficients associated with EquationEquation (45)
(45)
(45) has a rank equal to 6.
Listing 8: Linear dependencies of third-order spherical tensor invariants of the form
exprS3 = a1 * I3S[1, 1] + a2 * I3S[2, 1] + a3 * I3S[1, 3] + a4 * I3S[2, 2] + a5 * I3S[2, 3] + a6 * I3S[3, 3] + a7 * I3S[1, 2] + a8 * I3S[3, 1] + a9 * I3S[3, 2]; QtermsS3 = Flatten[Outer[Times, QmatS, QdmatS, QdmatS]]; exprS3coeff = Union[Flatten[Coefficient[exprS3, QtermsS3]]]; exprS3coeffeq = Table[exprS3coeff[[i]] == 0, {i, 1, Length[exprS3coeff]}]; Solve[exprS3coeffeq, acoeff] acoeffall = Union[acoeff, {a7, a8, a9}]; matS3 = Normal[CoefficientArrays[Drop[exprS3coeff, 1], acoeffall][[Citation2]]]; Dimensions[matS3] MatrixRank[matS3] REmatS3 = MatrixForm[RowReduce[matS3][[1;; 6, 1;; 9]]]
The following code computes the linear dependences (EquationEquation (49)(49)
(49) ) and shows that the system of linear equations for the coefficients associated with EquationEquation (48)
(48)
(48) has a rank equal to 13.
Listing 9: Linear dependencies of fourth-order spherical tensor invariants of the form
LMJs = {{1, 1, 1}, {1, 1, 2}, {2, 2, 0}, {2, 2, 1}, {2, 2, 2}, {3, 3, 1}, {3, 3, 2}, {3, 3, 3}, {1, 2, 1}, {1, 3, 1}, {1, 3, 2}, {2, 3, 1}, {2, 3, 2}, {1, 1, 3}, {1, 2, 2}, {1, 2, 3}, {1, 3, 3}, {2, 2, 3}, {2, 2, 4}, {2, 3, 3}, {2, 3, 4}, {3, 3, 4}, {3, 3, 5}}; exprS4 = Total[Table[Subscript[b, j] * I4S[LMJs[[j]][[Citation1]], LMJs[[j]][[Citation2]], LMJs[[j]][[Citation3]]], {j, 1, Length[LMJs]}]]; QtermsS4 = Flatten[Outer[Times, QmatS, QmatS, QdmatS, QdmatS]]; bcoeff13 = Table[Subscript[b, j], {j, 1, 13}]; exprS4coeff = Union[Flatten[Coefficient[exprS4, QtermsS4]]]; exprS4coeffeq = Table[exprS4coeff[[i]] == 0, {i, 1, Length[exprS4coeff]}]; solnS4 = Solve[exprS4coeffeq, bcoeff13] bcoeffall = Table[Subscript[b, j], {j, 1, 23}]; matS4 = Normal[CoefficientArrays[Drop[exprS4coeff, 1], bcoeffall][[Citation2]]]; Dimensions[matS4] MatrixRank[matS4] REmatS4 = MatrixForm[RowReduce[matS4][[1;; 13, 1;; 23]]]
Acknowledgments
This research was partially supported by the Academy of Finland. The author is grateful for the referee who gave valuable comments and suggestions.
10. Supplementary material
The following listings are the plain text input code for the computations discussed in Appendix A–E. We hope that this work supplies a useful framework to confirm the above calculations and to make the tensor computations tractable for further analysis and applications.
References
- E. Acerbi, and N. Fusco, Arch. Rational Mech. Anal. 86 (2), 125 (1984). doi:10.1007/BF00275731
- L. D. Landau, On the theory of phase transitions. Parts I and II. Zh. Eksp. Teor. Fiz. 7 (19), 627 (1937); Phys. Z. Sowjetunion 11 (26), 545 (1937); Collected papers of L. D. Landau, edited by D. T. Haar (Elsevier, Amsterdam, Netherlands, 1965), pp. 193–216.
- P. G. de Gennes, Phys. Lett. A. 30 (8), 454 (1969). doi:10.1016/0375-9601(69)90240-0
- P. G. de Gennes, Mol. Cryst. Liq. Cryst. 12 (3), 193 (1971). doi:10.1080/15421407108082773
- W. H. de Jeu, Physical Properties of Liquid Crystalline Materials (Gordon and Breach, Philadelphia, PA, 1980).
- A. Jákli, O. D. Lavrentovich, and J. V. Selinger, Rev. Mod. Phys. 90 (4), 045004 (2018). doi:10.1103/RevModPhys.90.045004
- T. C. Lubensky, Phys. Rev. A 2 (6), 2497 (1970). doi:10.1103/PhysRevA.2.2497
- D. W. Berreman, and S. Meiboom, Phys. Rev. A 30 (4), 1955 (1984). doi:10.1103/PhysRevA.30.1955
- A. Poniewierski, and T. J. Sluckin, Mol. Phys. 55 (5), 1113 (1985). doi:10.1080/00268978500101931
- K. Schiele, and S. Trimper, Phys. Stat. Sol. (B). 118 (1), 267 (1983). doi:10.1002/pssb.2221180132
- L. Longa, D. Monselesan, and H.-R. Trebin, Liq. Cryst. 2 (6), 769 (1987). doi:10.1080/02678298708086335
- T. Nutma, Comput. Phys. Commun. 185 (6), 1719 (2014). doi:10.1016/j.cpc.2014.02.006
- M. M. Salomaa, and G. E. Volovik, Rev. Mod. Phys. 59 (3), 533 (1987). doi:10.1103/RevModPhys.59.533
- L. Longa, and H.-R. Trebin, Phys. Rev. A Gen. Phys. 39 (4), 2160 (1989). doi:10.1103/physreva.39.2160
- ] B. Dacorogna, Direct Methods in the Calculus of Variations, 2nd ed., Applied Mathematical Sciences. (Springer, New York, NY, 2008), Vol. 78.
- M. Giaquinta, and S. Hildebrandt, Calculus of Variations I: The Lagrangian Formalism, Grundlehren der Mathematischen Wissenschaften. (Springer-Verlag, Berlin, Germany, 1996), Vol. 310.
- G. Kitavtsev et al., Math. Models Methods Appl. Sci. 26 (14), 2769 (2016). doi:10.1142/S0218202516500664
- L. D. Landau, and E. M. Lifshitz, Quantum Mechanics: Non-Relativistic Theory, 3rd ed., Translated by J. B. Sykes and J. S. Bell, Course of Theoretical Physics, Butterworth-Heinemann, repr. 1991), Vol. 3.
- A. O. Barut, and R. Raczka, Theory of Group Representations and Applications, 2nd ed. (World Scientific, Singapore, 1986).
- C. J. F, Group Theory in Physics: An Introduction (Academic Press, Cambridge, MA, 1997).
- J. Fuchs, and C. Schweigert, Symmetries, Lie Algebras and Representations: A Graduate Course for Physicists (Cambridge Monographs on Mathematical Physics, Cambridge University Press, Cambridge, 1997).
- B. Hall, Lie Groups, Lie Algebras, and Representations. An Elementary Introduction, 2nd ed., Graduate Texts in Mathematics. (Springer, Berlin, Germany, 2015), Vol. 222.
- S. B. L, Irreducible Tensor Methods: An Introduction for Chemists, Physical Chemistry (Academic Press, Cambridge, MA, 1976), Vol. 36.
- J. M. Ball, Mol. Crystal. Liquid Crystal. 647 (1), 1 (2017). doi:10.1080/15421406.2017.1289425
- J. M. Ball, and A. Majumdar, Mol. Cryst. Liq. Cryst. 525 (1), 1 (2010). doi:10.1080/15421401003795555
- G. Babakhanova et al., Phys. Rev. E. 96 (6–1), 062704 (2017). doi:10.1103/PhysRevE.96.062704
- W. H. De Jeu, W. A. P. Claassen, and A. M. J. Spruijt, Mol. Crystal. Liquid Crystal. 37 (1), 269 (1976). doi:10.1080/15421407608084362
- D. Pociecha et al., Phys. Rev. E. 98 (5), 052706 (2018). doi:10.1103/PhysRevE.98.052706
- S. Srigengan et al., J. Mater. Chem. C 6 (5), 980 (2018). doi:10.1039/C7TC04664B
- D. Mucci, and L. Nicolodi, Arch. Rational. Mech. Anal. 206 (3), 853 (2012). doi:10.1007/s00205-012-0543-2
- J. L. Ericksen, Phys. Fluids 9 (6), 1205 (1966). doi:10.1063/1.1761821
- G. Racah, Phys. Rev. 62 (9–10), 438 (1942). doi:10.1103/PhysRev.62.438
- A. J. Stone, Mol. Phys. 29 (5), 1461 (1975). doi:10.1080/00268977500101281
- A. J. Stone, J. Phys. A: Math. Gen. 9 (4), 485 (1976). doi:10.1088/0305-4470/9/4/005