
 ?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.
?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.Abstract
The current paper focuses on a multiobjective transportation problem which is a special type of vector minimum problem. In order to deal with such a problem, a new model based on fuzzy goal programming is suggested. Different solutions are obtained according to the priorities of the decision maker in the proposed model. With respect to its properties, at least a weakly efficient solution is yielded by solving the new model. To demonstrate the validity and strengths of the suggested model, some numerical examples are given. Further, a comparison is made with different existing methods.
1. Introduction
In today’s highly competitive market, the pressure on organisations to find ways to create and deliver value to customers becomes stronger [Citation1]. In this manner, transportation problems provide a powerful framework to deal with this challenge. The basic transportation problem deals with transportation of goods from factories (supply points) to customers (demand points). Demand and supply are considered as equality constraints and the objective is to minimise the total transportation cost considering the restrictions of supply and demand. The basic transportation problem was first developed by Hitchcock in 1941 as a particular type of linear programming problem [Citation2]. Due to the special mathematical structure of the transportation problem, efficient solution methods derived from the well-known Simplex method to solve it [Citation3, Citation4].
In real-life transporting system, several objective functions such as minimisation of the transportation cost, transportation time, etc., are normally considered due to various aspects of decision maker as well as real-life situations for an industrial problem. Transportation problem with different objective functions called multiobjective transportation problem is another influential trend worthy of study. In comparison with single objective transportation problem, it is more reasonable and practical in terms of actual applications. Multiobjective transportation problem is a special type of multiobjective linear programming problem [Citation5–8]. Several researchers have intensively investigated multiobjective transportation problems. Diaz [Citation9] and Isermann [Citation10] proposed different algorithms for identifying all nondominated solutions for linear multiobjective transportation problems. Two interactive algorithms for obtaining the solutions of linear multiobjective transportation problems were developed by Ringuest and Rinks [Citation11]. A review of multiobjective design of transportation networks was done by Current et al [Citation12]. Generally, in a multiobjective transportation problem, the available data such as transportation cost, availabilities, demand, etc. are not known precisely. It is due to various aspects, like lack of input information, weather and road conditions, etc. In order to tackle uncertainty, fuzzy set theory which was introduced by Zadeh [Citation13] and Bellman and Zadeh [Citation14] could be applied [Citation15–22].
Goal programming as an applicable tool for dealing with multiobjective programming was introduced by Charnes and Cooper [Citation23]. Due to the efficiency of this approach, it has been gained the attention of many researchers [Citation24–32]. In conventional goal programming, it is assumed that the aspiration levels of the objectives are known precisely. However, it is often a difficult task to determine these values certainly. A goal with an imprecise aspiration level could be handled by fuzzy set theory. Fuzzy goal programming has been used to deal with multiobjective transportation problems. As an instance, Abd El-Wahed and Lee [Citation33] proposed an interactive fuzzy goal programming for multiobjective transportation problems. Zangiabadai and Maleki [Citation34, Citation35] also applied fuzzy goal programming approach to solve multiobjective transportation problems with linear and nonlinear membership functions.
In multiobjective optimisation, weighted additive models are very popular among researchers when weights of objectives are specified. These models have also been used in fuzzy goal programming approach [Citation36–38]. A weighted additive model with some more advantages was also presented by Yaghoobi et al [Citation39].
As stated before, though some investigations have been performed on goal programming as a method in multiobjective optimisation, there are some gaps in its usage in real-life situations, where traditional goal programming is not adequate to tackle the situation. In this regard, our main focus is on fuzzy goal programming to solve multiobjective transportation problems. A new model based on fuzzy goal programming is presented. It could be proved that at least a weakly efficient solution is obtained for the multiobjective transportation problem by solving the new model. Further, an efficient solution is achieved if the new model has a unique optimal solution. The new model may be considered as a modification of the weighted additive model which was presented by Yaghoobi et al. in [Citation39]. To emphasise the effectiveness of the new model, a comparison with some existing methods is made.
The rest of the paper is designed as follows. Section 2 presents the mathematical formulation of a multiobjective transportation problem. In Section 3, the weighted additive model proposed by Yaghoobi et al. in [Citation39] is reviewed. Moreover, our new model for solving multiobjective transportation problems is stated in Section 3. Some numerical examples are provided in Section 4. Further, results and discussions are reflected in this section. Finally, Section 5 is devoted to conclusions and future research directions.
2. Problem Formulation
In the real-world situations, transportation problems usually involve multiple, incommensurable and conflicting objective functions. A transportation problem which deals with different objective functions is called a multiobjective transportation problem (MOTP). Generally, a MOTP consists of m number of sources and n number of destinations. Assume represents the total availability of a homegeneous product at source i and
represents the total demand of this product at destination j. Let
be the cost of transporting one unit product from source i to destination j. It could be considered as the cost of transportation, delivering time, cost of damage or safety of delivery, etc. Let
,
, … ,
be
objectives that are to be minimised. A variable
represents the unknown quantity to be shipped from the ith source to the jth destination. It is assumed that the total demand is equal to the total supply (balance condition). With these assumptions, the mathematical model of the MOTP is as follows.
(1)
(1)
It should be noted that is considered as the set of all feasible solutions of MOTP (1):
Since MOTP (1) is a special type of multiobjective problems, hence efficient and weakly efficient solutions are the most reasonable solutions in this problem. In order to review concepts of efficient and weakly efficient solution, the following definitions are stated [Citation6].
Definition 1:
A feasible solution is an efficient solution of MOTP (1) if there does not exist another
such that
, and
for some
.
Definition 2:
A feasible solution is an efficient solution of MOTP (1) if there does not exist another
such that
.
In MOTP (1), the set of all efficient solutions and the set of all weakly efficient solutions are denoted by and
, respectively. It is obvious that
.
3. Fuzzy Goal Programming Approach for Solving Motp
MOTP (1) is a special type of multiobjective programming problems. There does not usually exist an optimal solution that would simultaneously satisfy all objectives in multiobjective problems. Therefore, it is desirable to seek suitable compromise solutions for such problems. Different methods are existed for dealing with multiobjective problems [Citation6]. One of the most popular approaches is goal programming [Citation28]. Conventional goal programming models assume that the decision maker is able to determine a precise aspiration level for each of the objectives. However, in most real-world problems, the aspiration levels are not known certainly. In such cases, fuzzy goal programming could be employed. Here, in order to deal with MOTP (1) using goal programming approach, it is assumed that the aspiration level for each of the objectives is not known precisely. Hence, the following problem should be optimised.
(2)
(2)
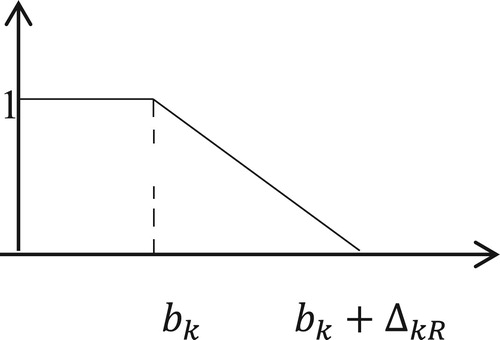
In problem (2), the symbol is interpreted as ‘essentially less than’. Each one of the fuzzy goals of problem (2) can be represented by a fuzzy set defined over the feasible set with the membership function. Applying piecewise linear membership functions to express the fuzzy goals and using weighted goal programming, the following weighted additive model is achieved [Citation39]:
In model (3), denotes the weight of the kth fuzzy goal. It is assumed that weights are provided and normalised such that the sum of
is equal to 1. Further, in the optimal solution of model (3), the slack variable of the constraint
is equal to the degree of membership function for the
th fuzzy goal [Citation39] ().
Figure 1. Fuzzy set .
3.1. The New Model
To propose the new model, instead of using deviational variables , in model (3), it is suggested to use deviational function
. Hence, to solve MOTP (1), the following model based on fuzzy goal programming is stated.
(4)
(4) where
is considered as
. Note that
is an optimal solution of the kth objective function. Furthermore,
is determined by
.
It should be noted that in model (4), values of the deviational function are consistent with the priority of objectives. It means that larger value of will result in a smaller value of the deviational function. This property of model (4) will take the objective with higher priority closer to its aspiration level. However, as will be shown in numerical examples, it is not the case in model (3). Moreover, when no preferences are defined for objectives, the new model (4) could solve MOTP (1). Some other nice properties of model (4) are stated in the following theorems.
Theorem 1:
Let be an optimal solution of model (4). Then
is at least a weakly efficient solution to MOTP (1).
Theorem 2:
Let be a unique optimal solution of model (4). Then
is an efficient solution to MOTP (1).
Note that the proofs of these theorems are straightforward and thus omitted for the sake of brevity.
4. Numerical Examples
Three different MOTPs are investigated in this section. These problems are solved by using the new model (4). To emphasise the advantages of model (4), the numerical examples are also solved by some existing methods and the results are compared.
Example 1:
Consider the following MOTP,
The results that are obtained by solving Example 1 for different weights using model (3), are given in . As could be seen in the table, it is obvious that deviational variables are not consistent with the priority of objectives. For instance, when and
, the deviational variables for the first and the second objective functions are
and
, respectively. It means that the first objective function which is less preferred has the value closer to its aspiration level. However, the consistency exists in which includes the results obtained by the new model (4). Further, shows that the same objective values are achieved for different weights by using model (3). However, the proposed model (4) yields different objective values for different weights ().
Table 1. Optimal objective values obtained from model (3).
Table 2. Optimal objective values obtained from model (4).
Example 2:
The following example is adopted from [Citation5].
By solving Example 2 with model (3) and model (4) for different weights, different results are obtained which are summarised in Tables and . All properties that have been explained in Example 1 for model (4) are also satisfied in this example. Actually, model (4) yields more comprehensive results in accordance to model (3). This example has been solved by Zangiabadi and Maleki in [Citation35] and obtained as the optimal compromise value of the objective vector
. Example 2 is also solved by the weighted sum method [Citation6] and the results are shown in . It can be seen here that, for different weights, the objective values increase and decrease more consistently for the new model (4) than for the weighted sum method. It should be note that when no preferences are given to the objectives,
is obtained by model (4) as the optimal compromise value of the objectives. However, the weighted sum method cannot be used without preference on objectives.
Table 3. Optimal objective values obtained from model (3).
Table 4. Optimal objective values obtained from model (4).
Table 5. Optimal objective values obtained from the weighted sum method.
Example 3:
Consider the following MOTP,
This problem is solved by the new model (4) and the weighted sum method for different weights. According to the results that are given in , different objective values are obtained by using model (4). However, we could see repetitive answers from the weighted sum method. Actually, the new model (4) yields more consistent results that let the decision maker select the best according to his/her preferences. Example 3 has also been considered by some authors. For instances, Ringuest and Rinks [Citation11] computed as the most preferred value of the objectives
and Bit et al [Citation17]. obtained
as the optimal compromise value of the objectives.
Table 6. Optimal objective values obtained from model (4) and the weighted sum method.
5. Conclusion
This paper has proposed a new model based on fuzzy goal programming to solve MOTPs. By varying the weights in the new model, different solutions could be obtained. With regard to its principal properties, at least a weakly efficient solution is obtained for MOTP. Moreover, an efficient solution is achieved if the new model has a unique optimal solution. Some numerical examples have been stated to illustrate the proposed model. To emphasise the advantages of the new model, a comparison has been made with some existing methods. For further investigations, MOTPs with uncertain demand and supplies are considered. Extension of the new model to such problems might be interesting. Moreover, try to propose new algorithms and methods with nice properties for dealing with MOTPs could be considered as a general topic for future research.
Acknowledgements
The authors thank the reviewers’ valuable comments and suggestions that helped them to improve and clarify the manuscript. Sanaz Rivaz was supported by Babol Noshirvani University of Technology with Grant program No. BNUT/395025/99.
Disclosure statement
No potential conflict of interest was reported by the author(s).
Additional information
Funding
Notes on contributors
S. Rivaz
Sanaz Rivaz is an Assistant Professor in the Department of Mathematics at Babol Noshirvani University of Technology, Iran. She completed her PhD degree in Applied Mathematics, Operations Research from Shahid Bahonar University of Kerman. Her main research interests are in the field of multiple criteria decision making, fuzzy programming, interval programming, and transportation problems. She has publications in Fuzzy Optimization and Decision Making, International Transactions in Operational Research, and some other international journals.
S. H. Nasseri
Seyed Hadi Nasseri received his Ph.D degree in 2007 on Fuzzy Mathematical Programming from Sharif University of Technology (SUT), and since 2007 he is a faculty member at the Faculty of Mathematical Sciences (Operations Research) in Babolsar, Iran. Recently, in 2018, he completed a post-doctoral program at Department of Industrial Engineering, Sultan Qaboos University (SQU), Muscat, Oman on Logistic on Uncertainty Conditions. Also, he collaborated with Foshan University (Department of Mathematics and Big Data), Foshan, China as a visiting professor, since 2018. He serves as the Editor-in-Chief (Middle East Area) of Journal of Fuzzy Information and Engineering since 2014 and the Editorial board member of five reputable academic journals. He is a council member of International Association of Fuzzy Information and Engineering (CHIPS), a Standing Director of the International Association of Grey Systems and Uncertainty Analysis (IAGSUA) since 2016, and a council member of Iranian Operations Research Society (IORS). International Center of Optimization and Decision Making (ICODM) is established by him in 2014 and also the Center of Optimization and Logistic (COL) in 2020. He also has received several awards including: International Award for Ph.D students entitled JASSO which is organized and supported by Japan Government, National Elite Foundation Research Award for Young Professors in 2008, Outstanding University Award in 2014 and 2017, Distinguished Researcher Awards in Mazandaran Province, Iran in 2011, 2012, 2013, 2014 and 2019, Distinguished Supervisor on Fuzzy Sets and Systems by Iranian Fuzzy Systems Society (IFSS) in 2018. He has published 7 books and more than 130 journal papers and 150 conference papers, and also has over 13 Ph.D theses and 70 MS.c theses, since 2008. His research interests are in the areas of Fuzzy Mathematical Models and Methods, Fuzzy Arithmetic, Fuzzy Optimization and Decision Making, Operations Research, Grey Systems, Logistic and Transportation.
M. Ziaseraji
Mobina Ziaseraji received her B.Sc. degree in Mathematics in 2018. She started her M. Sc. in Applied Mathematics, Operations Research at University of Mazandaran in 2018. Currently, her main focus is on multiobjective transportation problems.
References
- Kaur A, Kumar A. A new method for solving fuzzy transportation problems using ranking function. Appl Math Model. 2011;35:5652–5661. doi: 10.1016/j.apm.2011.05.012
- Hitchcock FL. Distribution of a product from several sources to numerous locations. J Math Phys. 1941;20:224–230. doi: 10.1002/sapm1941201224
- Charnes A, Cooper WW, Henderson A. An introduction to linear programming. New York: Wiley; 1953.
- Dantzig GB. Linear programming and extensions. Princeton: Princeton University Press; 1963.
- Diaz JA. Solving multiobjective transportation problem. Ekonomicko-matematicky Obzor. 1978;14:267–274.
- Ehrgott M. Multicriteria optimization. Berlin: Springer; 2005.
- Melin P, Sanchez D. Multi-objective optimization for modular granular neural networks applied to pattern recognition. Inf Sci. 2018;460-461:594–610. doi: 10.1016/j.ins.2017.09.031
- Rivaz S, Yaghoobi MA. Some results in interval multiobjective linear programming for recognizing different solutions. OPSEARCH. 2015;52:75–85. doi: 10.1007/s12597-013-0167-9
- Diaz JA. Finding a complete description of all efficient solutions to a multiobjective transportation problem. Ekonomicko-matematicky Obzor. 1979;15:62–73.
- Isermann H. The enumeration of all efficient solutions for a linear multiple-objective transportation problem. Nav Res Logist Q. 1979;26:123–139. doi: 10.1002/nav.3800260112
- Ringuest JL, Rinks DB. Interactive solutions for the linear multiobjective transportation problem. Eur J Oper Res. 1987;32:96–106. doi: 10.1016/0377-2217(87)90274-8
- Current J, Min H. Multiobjective design of transportation networks: taxonomy and annotation. J Oper Res. 1986;26:187–201. doi: 10.1016/0377-2217(86)90180-3
- Zadeh LA. Fuzzy sets. Inf Control. 1965;8:338–353. doi: 10.1016/S0019-9958(65)90241-X
- Bellman RE, Zadeh LA. Decision-making in fuzzy environment. Manage Sci. 1937;17:149–156.
- Abd El-Wahed WF. A multiobjective transportation problem under fuzziness. Fuzzy Sets Syst. 2001;117:27–33. doi: 10.1016/S0165-0114(98)00155-9
- Ammar EE, Youness EA. Study on multiobjective transportation problem with fuzzy numbers. Appl Math Comput. 2005;166:241–253.
- Bit AK, Biswal MP, Alam SS. Fuzzy programming approach to multicriteria decision making transportation problem. Fuzzy Sets Syst. 1992;50:135–141. doi: 10.1016/0165-0114(92)90212-M
- Li LS, Lai KK. A fuzzy approach to the multiobjective transportation problem. Comp Oper Res. 2000;27:43–57. doi: 10.1016/S0305-0548(99)00007-6
- Ochoa P, Castillo O, Soria J. Optimization of fuzzy controller design using a differential evolution algorithm with dynamic parameter adaptation based on type-1 and interval type-2 fuzzy systems. Soft Comput. 2020;24:193–214. doi: 10.1007/s00500-019-04156-3
- Ramzannia-Keshteli G, Nasseri SH. Solving flexible fuzzy multi-objective linear programming problems: feasibility and efficiency concept of solutions. Punjab Univ J Math. 2019;51:19–31.
- Roy SK, Midya S. Multi-objective fixed-charge solid transportation problem with product blending under intuitionistic fuzzy environment. Appl Intell. 2019;49:3524–3538. doi: 10.1007/s10489-019-01466-9
- Santiago A, Dorronsoro B, Nebro AJ, et al. A novel multi-objective evolutionary algorithm with fuzzy logic based adaptive selection of operators: FAME. Inf Sci. 2019;471:233–251. doi: 10.1016/j.ins.2018.09.005
- Charnes A, Cooper WW. Management models and industrial applications of linear programming. New York: Wiley; 1961.
- Aenaida RS, Kwak NW. A linear goal programming for transshipment problems with flexible supply and demand constraints. Fuzzy Sets Syst. 1994;45:215–224.
- Aouni B, Colapinto C, Torre DL. Financial portfolio management through the goal programming model: current state-of-the-art. Eur J Oper Res. 2014;234:536–545. doi: 10.1016/j.ejor.2013.09.040
- Charnes A, Cooper WW. Goal programming and multiobjective optimizations. Eur J Oper Res. 1997;1:39–54. doi: 10.1016/S0377-2217(77)81007-2
- Chen L, Peng J, Zhang B. Uncertain goal programming models for bicriteria solid transportation problem. Appl Soft Comput. 2017;51:49–59. doi: 10.1016/j.asoc.2016.11.027
- Jones DF, Tamiz M. Practical goal programming. New York: Springer; 2010.
- Nasseri SH, Ramzannia-Keshteli G. A goal programming approach for fuzzy flexible linear programming problems. Iran J Oper Res. 2018;9:1–28.
- Nomani MA, Ali I, Ahmed A. A new approach for solving multi-objective transportation problems. Int J Manag Sci Eng Manag. 2017;12:165–173.
- Ramzannia-Keshteli G, Nasseri SH. A multi-parametric approach to solve flexible multi-choice goal programming. Punjab Univ J Math. 2019;51:93–108.
- Rivaz S, Yaghoobi MA, Hladik M. (2015). Goal programming approach for solving interval MOLP problems. 8th Small Workshop on Interval Methods, Prague, Czech Republic.
- Abd El Wahed WF, Lee SM. Interactive fuzzy goal programming for multi-objective transportation problems. Omega. 2006;34:158–166. doi: 10.1016/j.omega.2004.08.006
- Zangiabadi M, Maleki HR. Fuzzy goal programming for multiobjective transportation problems. J Appl Math Comp. 2007;24:449–460. doi: 10.1007/BF02832333
- Zangiabadi M, Maleki HR. Fuzzy goal programming technique to solve multiobjective transportation problems with some non-linear membership functions. Iran J Fuzzy Syst. 2013;10:61–74.
- Chen LH, Tsai FC. Fuzzy goal programming with different importance and priorities. Eur J Oper Res. 2001;133:548–556. doi: 10.1016/S0377-2217(00)00201-0
- Hannan EL. On fuzzy goal programming. Decis Sci. 1981;12:522–531. doi: 10.1111/j.1540-5915.1981.tb00102.x
- Tiwari RN, Dharmar S, Rao JR. Fuzzy goal programming: an additive model. Fuzzy Sets Syst. 1987;24:27–34. doi: 10.1016/0165-0114(87)90111-4
- Yaghoobi MA, Jones DF, Tamiz M. Weighted additive models for solving fuzzy goal programming problems. Asia-Pacific J Oper Res. 2008;25:715–733. doi: 10.1142/S0217595908001973