
 ?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.
?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.ABSTRACT
In this article, we use the operation matrix (OM) of Riemann–Liouville fractional integral of the shifted Gegenbauer polynomials with the Lagrange multiplier method to provide efficient numerical solutions to the multi-dimensional fractional optimal control problems. The proposed technique transforms the under consideration problems into sets of nonlinear equations which are easy to solve. Numerical tests including numerical comparisons with some existing methods are introduced to demonstrate the accuracy and efficiency of the suggested technique.
1. Introduction
The mathematical topic of optimal control problems (OCPs) has received much attentions in the last years because it has a lot of important applications in physics, chemistry, engineering, etc. [Citation1, Citation2]. Recently, fractional calculus has demonstrated its accuracy in modelling many applications in various scientific fields [Citation3–5]
Fractional optimal control problem (FOCP) is an OCP in which the differential equations governing the dynamics of the system contain at least one fractional derivative operator. Due to the various applications of FOCPs in physics and engineering, they received much attentions from many researchers. these applications include the materials with memory and hereditary effects, dynamical processes containing gas diffusion and heat conduction in fractal porous media. Other applications of FOCPs are given in [Citation1, Citation6]. Because of a lot of FOCPs does not have analytical exact solutions, numerous numerical methods are offered to overcome these problems [Citation7–12]. In recent years, various OMs for different polynomials like Chebyshev polynomials [Citation13, Citation14], Legendre polynomials [Citation11, Citation15], Jacobi polynomials [Citation10, Citation16, Citation17], Bernstein polynomials [Citation18] and Lagguerre polynomial [Citation19] have been developed to cover the numerical solutions of different types of fractional differential equations [Citation20–23]. Our technique depends on the OM of RL fractional integral of shifted Gegenbauer polynomial (SGPs). The Gegenbauer polynomials have many useful properties. They generalize Legendre polynomials and Chebyshev polynomials of the first
and second
kind, and they are special cases of Jacobi polynomials. The most important characteristic of SGPs is achieving rapid rates of convergence [Citation24–27]. This encourages us to use these polynomials in the suggested technique as basis functions for finding the approximate solutions to a wide class of FOCPs in the following form:
(1)
(1) subject to
(2)
(2) with
where
is the Caputo fractional derivative of order
and
is the number of variables. In the proposed technique; the state and the control variables are approximated by SGPs. By using the OM of Riemann–Liouville fractional integral (RLFI) of the SGPs with the Lagrange multiplier method (LMM), the FOCPs are reduced to simple sets of nonlinear equations (NEs). The efficiency of the proposed technique is demonstrated by some numerical examples including problems in one-, two- and three-dimensional spaces, Also numerical comparisons between the suggested technique and some published results are held.
The rest of the paper is systemized as follows: We begin with some preliminaries of fractional calculus and GPs. In Section 3, the shifted Gegenbauer operational matrix (SGOM) of RL fractional integral is derived. In Section 4, the convergence of the proposed method is discussed. In Section 5, the proposed technique of applying SGOM of fractional integration for solving FOCPs is presented. In Section 6, some illustrative examples are offered. Finally concluding remarks end the paper.
2. Preliminaries and definitions
2.1. Fractional calculus definitions
Definition 2.1
One of the popular definitions of the fractional integral is the Riemann–Liouville (RL), which get from the relation
(3)
(3) The operator
has properties said in [Citation28], we just recall the next property
(4)
(4)
Definition 2.2
is the RL fractional derivative of order ν is defined by
(5)
(5) where m is the smallest integer greater than ν.
Lemma 2.1
If then
(6)
(6)
2.2. Shifted Gegenbauer polynomials and their properties
The shifted ultraspherical (Gegenbauer) polynomials of degree
with the associated parameter
are a sequence of real polynomials in the finite domain
They are a family of orthogonal polynomials which has many properties:
The analytical form of the SGP is given by
(7)
(7) and
The orthogonal relation of SGPs is:
(8)
(8) where
is the weight function, and it is even function given from the relation
and
This polynomial recover the shifted Chebyshev polynomial of the first kind the shifted Legendre polynomial
and the shifted Chebyshev polynomial of the second kind
.
The square integrable function in
is approximated by SGPs as:
where the coefficients
are getting from
(9)
(9) The approximation of function
in the vector form is defined by
(10)
(10) where
is the shifted Gegenbauer coefficient vector, and
(11)
(11) is the shifted Gegenbauer vector. The q times repeated integration of Gegenbauer vector is
(12)
(12) where
is called the OM of the integration of
.
3. Fractional SGOM of integration
In this section, the SGOM of RLFI will be derived.
Theorem 3.1
Let be the shifted Gegenbauer vector and
then
(13)
(13)
where
and
is called OMFI of order ν in the RL sense, it is an
and is written as
(14)
(14) where
is given by
where
(15)
(15)
Proof.
From relation (Equation7(7)
(7) ) and by using Equations (Equation3
(3)
(3) ) and (Equation4
(4)
(4) ), we can write
(16)
(16) The function
can be written as a series of N+1 terms of Gegenbauer polynomial,
(17)
(17) where
(18)
(18) Now, by employing Equations (Equation16
(16)
(16) )–(Equation18
(18)
(18) ) we obtain:
(19)
(19) where
is given in Equation (Equation15
(15)
(15) ).
Writing the last equation in a vector form gives
(20)
(20) which finishes the proof.
4. Error estimation and convergence analysis
4.1. Error estimation
In the following theorem, the error estimation for the approximated functions will be expressed in terms of Gram determinant [Citation29].
Theorem 4.1
Assume that is the Hilbert space, and let Y be a closed subspace of H such that
Let
be an arbitrary element of H and
be the unique best approximation of
out of Y, then
(21)
(21) where
4.2. Convergence analysis
Consider the error, of the operational matrix of RLFI as
where
is an error vector.
From Equation (17), we had approximated as
From the above theorem, we have
(22)
(22) By using Equation (19), the upper bound of the operational matrix of integration will be
(23)
(23)
(24)
(24) The following theorem illustrates that by increasing the number of SGPs the error tends to zero.
Theorem 4.2
Suppose that function is approximated by
as follows
where
Consider
then we have
For the proof [Citation30].
5. Application of SGOM for FOCPs
In this section, the SGPs are used with the OM of the RLFI for solving the following FOCPs (Equation1(1)
(1) ) and (Equation2
(2)
(2) )
5.1. Shifted Gegenbauer approximation
Firstly, approximating and
by, SGPs,
as
(25)
(25) and
where X and U are unknown coefficients matrices which are written as
respectively. By using the relation
into Equation (Equation25
(25)
(25) ), we have
(26)
(26) By using SGOM relation together with Equation (Equation25
(25)
(25) ), we get
(27)
(27) From Equations (Equation26
(26)
(26) ) and (Equation27
(27)
(27) ), we get
(28)
(28) where
is the coefficients vector of
By approximating t and by the SGP
as
(29)
(29) where R and
are known vectors defined as
where
(30)
(30)
By using Equations (Equation25(25)
(25) ), (Equation28
(28)
(28) ) and (Equation29
(29)
(29) ) into Equation (Equation1
(1)
(1) ), we get
(31)
(31)
Employing Equations (Equation25(25)
(25) ), (Equation28
(28)
(28) ) and (Equation29
(29)
(29) ), the dynamic constraints (Equation2
(2)
(2) ) can be approximated as
(32)
(32) Let
(33)
(33) where
is an
matrix.
The elements of the matrix are getting from the following relation
(34)
(34) where
and
By using Equation (Equation33(33)
(33) ) into Equation (Equation32
(32)
(32) ), we obtain
(35)
(35) Secondly, assume that
(36)
(36) where Λ is the unknown Lagrange multiplier vector,
By applying the necessary conditions of optimality to Equation (Equation36(36)
(36) ), we have
(37)
(37)
By using Newton iterative method, this system of NEs can be solved for the unknown coefficients of the vectors X, U and Λ.
5.2. Approximation of our problem
In our case, the set of Gegenbauer polynomials, is used as a basis which form the space
is continuously differentiable on interval
with uniform norm
Let us consider
where
is the n-dimensional subspace of
and
are arbitrary real numbers. If we choose
in such a way that
minimizes J, denoting the minimum by
Then, we should have
this implies
.
Theorem 5.1
Consider the functional J then where
For the proof, see [Citation21, Citation31].
6. Illustrative problems
One-Dimensional Problems
Problem 6.1
Consider the following FOCP [Citation21],
with the dynamic constraint
At
the exact solution is
where
By applying the suggested technique to Problem 6.1, the resultant numerical results for the state and the control
variables are displayed through Figure (a,b), respectively, at
with the exact solutions for N=8. We noted that the obtained solutions cover the classical results when the value of the fractional order tends to unity. Also in Tables and , the absolute errors of the state
and the control
variables for Problem 6.1 are calculated at various choices of N. It is observed that the efficiency of the proposed method is increased by increasing N.
Figure 1. The behaviour of the approximate solutions of problem 6.1 for N=5 and with the exact solution. (a)
. (b)
.
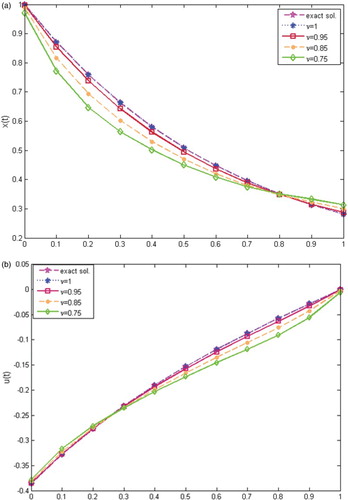
Table 1. The absolute errors of  for Problem 6.1 at various choices of N.
for Problem 6.1 at various choices of N.
Table 2. The absolute errors of for Problem 6.1 at various choices of N.
Problem 6.2
Consider the following FOCP [Citation21, Citation32]
subject to
In Figure (a,b), the obtained results of the variables and
of Problem 6.2 are plotted for different values of ν. In Table , comparisons of our numerical results for the minimum values of J of Problem 6.2 with different values of ν at N=8 together with the results obtained in [Citation13] and [Citation33] are tabulated. Obviously, our estimated results are in a good agreement with the results in [Citation13, Citation33].
Figure 2. The behaviour of the approximate solutions of problem 6.2 for N=3 and . (a)
. (b)
.
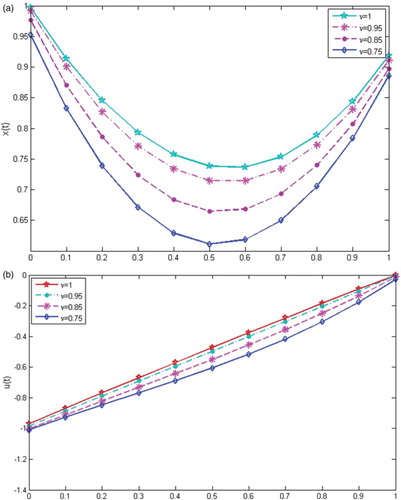
Table 3. The estimated values of J for different values of ν and N=8 for Problem 6.2.
Problem 6.3
Consider the following FOCP [Citation14]
with the dynamic
Figure (a,b) show the approximated results of state and the control
variables of Problem 6.3 at N=3 and
and 2. In Table comparisons of obtained results for the minimum values of J of Problem 6.3 at different choices of N together with the results obtained in [Citation14] are tabulated. It is noted that the approximated results obtained by the suggested technique are more accurate than the results in [Citation14].
Figure 3. The behaviour of the approximate solutions of problem 6.3 for N=3 with . (a)
. (b)
.
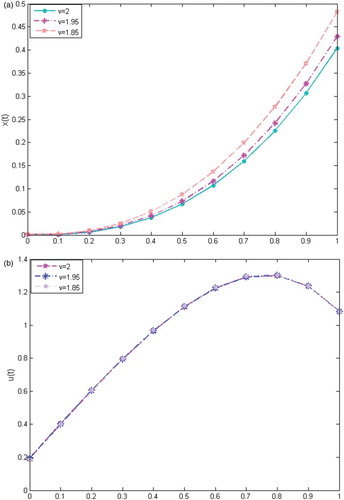
Table 4. The estimated values of J at various choices of N and for Problem 6.3.
Two-Dimensional Problems
Problem 6.4
Consider the following FOCS [Citation34]
under the constraint
At
the exact solution is
Figure (a–c) illustrate the behaviour of state variables and control variable
, respectively, for N=8 and
and 1 with the exact solutions. Tables – display the comparison of the absolute errors by using our mechanism and the method mention in [Citation35] of the variables
and
for Problem 6.4 at
and
. These results show that the suggested method is more accurate than the results of [Citation35]. This problem was solved in [Citation34] by a different technique. The results shown in Figure (a–c) are in a good agreement with the results established in [Citation34]. It is remarkable that we achieved satisfactory numerical results with at last 8 numbers of the SGP while in [Citation34], number of approximations starts in 8 and increases up to 128 are used to obtain satisfactory results. So we can deduce that our numerical technique is less computational than that in [Citation34].
Figure 4. The behaviour of the approximate solutions of problem 6.4 for N=8 and , with exact solution. (a)
. (b)
. (c)
.
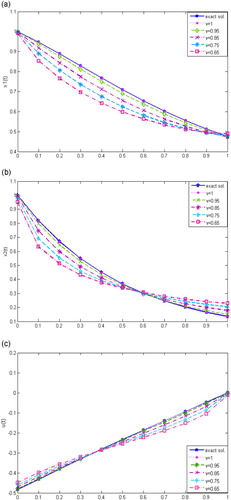
Table 5. Absolute errors of for at various choices of N for Problem 6.4.
Table 6. Absolute errors of for at different choices of N for Problem 6.4.
Table 7. Absolute error of for at different values of N for Problem 6.4.
Three-Dimensional Problem
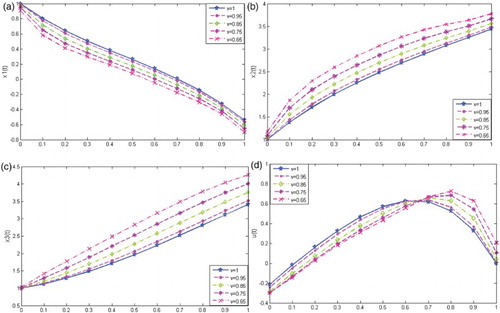
Problem 6.5
Consider the following FOCS ([Citation36])
with the dynamic constraints
Figure (a–d) illustrate the behaviour of approximate solution of the variables and
, respectively, for N=5 at various choices of ν (
and 1).
Figure 5. The behaviour of the approximate solutions of problem 6.5 for N=5 and . (a)
. (b)
. (c)
. (d)
.
7. Conclusions
In this paper, a new numerical mechanism has been derived to find the approximate solutions of the multi-dimensional FOCPs, this numerical mechanism depends on the SGOM of RLFI. The SGOM of fractional integration reduced the FOCP into an equivalent integral problem. The properties of the SGPs together with the LMM are used to transform the equivalent functional integral equation problem into an algebraic system of equations, which is easily to solve. The applicability, accuracy and rapidity by using few terms of the SGPs of the proposed mechanism are illustrated by numerical applications and the numerical comparisons with some existing methods in the literatures.
Disclosure statement
No potential conflict of interest was reported by the author.
ORCID
Hoda F. Ahmed http://orcid.org/0000-0001-8930-1296
References
- Bohannan GW. Analog fractional order controller in temperature and motor control applications. J Vib Control. 2008;14(9–10):1487–1498.
- Suarez JI, Vinagre BM, Chen Y. A fractional adaptation scheme for lateral control of an AGV. J Vib Control. 2008;14(9–10):1499–1511.
- Atanackovic TM, Pilipovic S, Stankovic B, et al. Fractional calculus with applications in mechanics: wave propagation, impact and variational principles. New York (NY): Wiley; 2014.
- Machado JAT, Silva MF, Barbosa RS, et al. Some applications of fractional calculus in engineering. Math Prob Eng. 2010;2010:1–34.
- Kilbas AA, Srivastava HM, Trujillo JJ. Theory and applications of fractional differential equations. San Diego (CA): Elsevier; 2006.
- Jesus IS, Machado JT. Fractional control of heat diffusion systems. Nonlinear Dyn. 2008;54:263–282.
- Agrawal OP. Fractional optimal control of a distributed system using eigenfunctions. J Comput Nonlinear Dyn. 2008;3(2):021204.
- Tricaud C, Chen Y. An approximate method for numerically solving fractional order optimal control problems of general form. Comput Math Appl. 2010;59(5):1644–1655.
- Debbouche A, Nieto JJ, Torres DF. Optimal solutions to relaxation in multiple control problems of Sobolev type with nonlocal nonlinear fractional differential equations. J Optim Theory Appl. 2017;174(1):7–31.
- Bhrawy AH, Doha EH, Baleanu D, et al. A spectral tau algorithm based on Jacobi operational matrix for numerical solution of time fractional diffusion-wave equations. J Comput Phys. 2015;293:142–156.
- Erjaee GH, Akrami MH, Atabakzadeh MH. The operational matrix of fractional integration for shifted Legendre polynomials. Iranian J Sci Technol (Sciences). 2013;37(4):439–444.
- Nemati A, Yousefi S, Soltanian F, et al. An efficient numerical solution of fractional optimal control problems by using the Ritz method and Bernstein operational matrix. Asian J Control. 2016;18(6):2272–2282.
- Doha EH, Bhrawy AH, Ezz-Eldien SS. A Chebyshev spectral method based on operational matrix for initial and boundary value problems of fractional order. Comput Math Appl. 2011;62(5):2364–2373.
- Bhrawy AH, Alofi AS. The operational matrix of fractional integration for shifted Chebyshev polynomials. Appl Math Lett. 2013;26(1):25–31.
- Saadatmandi A, Dehghan M. A new operational matrix for solving fractional-order differential equations. Comput Math Appl. 2010;59(3):1326–1336.
- Doha EH, Bhrawy AH, Ezz-Eldien SS. A new Jacobi operational matrix: an application for solving fractional differential equations. Appl Math Model. 2012;36(10):4931–4943.
- Bhrawy AH, Tharwat MM, Alghamdi MA. A new operational matrix of fractional integration for shifted Jacobi polynomials. Bull Malays Math Sci Soc. 2014;37(4):983–995.
- Saadatmandi A. Bernstein operational matrix of fractional derivatives and its applications. Appl Math Model. 2014;38(4):1365–1372.
- Bhrawy AH, Baleanu D, Assas LM. Efficient generalized Laguerre-spectral methods for solving multi-term fractional differential equations on the half line. J Vib Control. 2014;20(7):973–985.
- Kucuk I, Sadek I. An efficient computational method for the optimal control problem for the Burgers equation. Math Comput Model. 2006;44(11):973–982.
- Lotfi A, Dehghan M, Yousefi SA. A numerical technique for solving fractional optimal control problems. Comput Math Appl. 2011;62(3):1055–1067.
- Maleknejad K, Almasieh H. Optimal control of Volterra integral equations via triangular functions. Math Comput Model. 2011;53(9):1902–1909.
- Maleknejad K, Hashemizadeh E, Basirat B. Computational method based on Bernstein operational matrices for nonlinear Volterra–Fredholm–Hammerstein integral equations. Commun Nonlinear Sci Numer Simul. 2012;17(1):52–61.
- El-Hawary HM, Salim MS, Hussien HS. An optimal ultraspherical approximation of integrals. Int J Comp Math. 2000;76(2):219–237.
- El-Kady MM, Hussien HS, Ibrahim MA. Ultraspherical spectral integration method for solving linear integro-differential equations. Int J Appl Math Comput Sci. 2009;5:1.
- Elgindy KT. High order numerical solution of second order one dimensional hyperbolic telegraph equation using a shifted Gegenbauer pseudospectral method. Numer Methods Partial Differ Equ. 2016;32(1):307–349.
- Elgindy KT, Smith-Miles KA. Optimal Gegenbauer quadrature over arbitrary integration nodes. J Comput Appl Math. 2013;242:82–106.
- Miller KS, Ross B. An introduction to the fractional calculus and fractional differential equations. Wiley-Interscience; 1993.
- Kreyszig E. Introductory functional analysis with applications. New York (NY): Wiley; 1989.
- Rivlin TJ. An introduction to the approximation of functions. New York: Dover-Publications-Inc; 2003.
- Phang C, Ismail NF, Isah A, et al. A new efficient numerical scheme for solving fractional optimal control problems via a Genocchi operational matrix of integration. J Vib Control. 2017. https://doi.org/10.1177/1077546317698909
- Agrawal OP. A general formulation and solution scheme for fractional optimal control problems. Nonlinear Dyn. 2004;38(1–4):323–337.
- Akbarian T, Keyanpour M. A new approach to the numerical solution of fractional order optimal control problems. Appl Appl Math. 2013;8:523–534.
- Defterli O. A numerical scheme for two-dimensional optimal control problems with memory effect. Comput Math Appl. 2010;59(5):1630–1636.
- Yousefi SA, Lotfi A, Dehghan M. The use of a Legendre multiwavelet collocation method for solving the fractional optimal control problems. J Vib Control. 2011;17(13):2059–2065.
- Bhrawy AH, Doha EH, Tenreiro Machado JA, et al. An efficient numerical scheme for solving multi-dimensional fractional optimal control problems with a quadratic performance index. Asian J Control. 2015;17(6):2389–2402.