
 ?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.
?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.ABSTRACT
In this paper, we study the cooperation between two searchers start the searching process from the origin to meet a Brownian moving target on a real line. We find the conditions that make the expected value of the first meeting time between one of the searchers and the target is finite. This is the first model which calculates the approximate value for the expected value of the first meeting time. An illustrative example has been given to demonstrate the applicability of this model.
1. Introduction
In physics, the Brownian motion is useful for studying a variety of natural phenomena such as heat conduction and gases diffusion. Modelling the Brownian particle's movement in the cylinder is one of an interesting physics problems. The aim of this model is to obtain the expected value of the first meeting time between two particles after time t. The suitable technique which is used to do this is the Coordinated search technique. In the search theory for the lost targets, the importance of the Coordinated search technique is achieving in the organized collective action among the searchers to find the target with the highest degree of efficiency and the lowest possible cost. Reyniers [Citation1,Citation2] studied this technique on the real line when the target is located on this line according to a known bounded symmetric and asymmetric distribution. Reyniers considered two unit-speed searchers starting at the origin point seek for this hidden target. The objective is to minimize the expected time of the searchers to return to the origin after one of them has found this target. El-Hadidy et al. [Citation3,Citation4] studied this technique in the plane and they found the expected value of detecting the target. Also, they found the optimal search plan which minimizes this expected value in the case of the target position has a symmetric and asymmetric distributions. In an earlier work, the searching problem for a lost target has been studied extensively in many variations, mostly by El-Hadidy et al. [Citation5–13], Kagan and Ben-Gal [Citation14], Guerrier and Holcman [Citation15], Palyulin et al. [Citation16], Radmard and Croft [Citation17], Stone et al. [Citation18].
Recently, in the case of a Random Walk moving target on the line Abou-Gabal and El-Hadidy [Citation19] introduced this technique and found the conditions that make the expected value of the first meeting time between one of the searchers and the target is finite. In addition, they showed the existence of the optimal search strategy which minimizes this first meeting time. Mohamed and El-Hadidy [Citation20] found the conditions that make the expected value of the first meeting time for the searchers to return to (0,0) after one of them has met the conditionally deterministic target, is finite. They showed the existence of an optimal search plan which made the expected value of the first meeting time is minimum. In addition, we find the necessary conditions that make the search strategy be optimal.
In the above techniques, we ask ourselves, how the Coordinated search technique minimizes the expected search time although the searchers return to the origin and one of them is waiting for the other?. The advanced technology can save this lost time without returning any searcher to the origin. Thus, the primary concern of this paper lies in the Coordinated search technique which allows two unit-speed searchers starting at the origin point seek for a Brownian target without returning to the origin. The first searcher searches the right part of the real line towards to and the other searcher searches the left part towards to
. We aim to show there exists a finite search plan that and calculates the expected value of the first meeting time between the searcher and the target.
This paper is organized as follows: Section 2 discusses the assumptions which modelling the search problem for a Brownian target. In Section 3 we determine the conditions that make the search plan be finite. We calculate the expected value of the first meeting time between the searcher and the target, in Section 4. Section 5 gives an example with numerical results that can show the effectiveness of this model. Finally, the paper concludes with a discussion of the results and directions for future research.
2. Problem formulation
In the well-known linear search problem, the searcher does step number after repeating all previous steps, why? This wastes the detection time (cost) (see Beck [Citation21,Citation22]). Here we aim to reduce this cost by presenting a new search model. The idea of this model is inspired by the coordinated search technique. Using the connection technology methods, any one of the searcher should not repeat any steps as in Reyniers [Citation1,Citation2].
2.1. The searching framework
The space of search: The search space is an axis of a cylinder (a real line ).
The target: The target is assumed to move randomly on the real line according to the Brownian motion The initial position of the target is unknown but the searchers know its probability distribution (the probability distribution of the target is given at time 0, and the process
which controls the target’s motion).
The means of search: We have two searchers start together looking for the target from the origin. The searcher
searches in the right part and
in the left part of the real line. They do not return to the origin after searching successively common distances until the target is found. This provides almost half the cost which had been obtained by Reyniers [Citation1,Citation2].
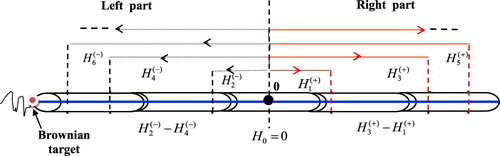
The searcher would conduct its search in the following manner: Start at
and go to the right (left) as far as
. Then, use the wireless communication methods to tell the other searcher if the target is found or not. Retrace the steps again at the point
to explore the right (left) part of
as far as
and so on, see .
Figure 1 Coordinated search technique for finding a Brownian target.
The objective is to obtain the condition that makes the search plan be finite.
3. Existence of a finite search plan
The two searchers and
are coordinating their search and following the search paths
respectively, to detect the target, where,
(1)
(1)
and
,
are the velocities of the searchers in the right and left part respectively. Let
and
are positive integer numbers greater than one. We introduce the sequences
,
,
and
(see El-Rayes et al. [Citation23]) to obtain the distances which the searchers should do them as a function of
and
. In this model the searchers do not return to the origin as in then we can define:
Also, there is no return time to the origin then the travelled distances at the time step
are given by:
in the right and left part of the real line, respectively. And,
, where
,
are rational numbers.
Now, we can define the search paths as follows: in the right part, for any if
, then:
(2)
(2)
In the left part, for any if
, then:
(3)
(3)
Assuming that the notations ,
are held and
is the first meeting between one of the searcher and the target where,
is a random variable which represents the initial position of the target and independent with
In addition, we let the search plan be represented by
, where
.
Since, the probability density function can be described as a calendar for the continuity of the relative frequencies of the data in a given interval, because the sample space contains an infinite number of possible outcomes. Therefore, the probability of any certain value is equal to zero. Due to the occurrence of the first meeting time between one of the searchers and the Brownian target at one certain values (Legal values) on the given field
or
have a known probability values greater than zero, then we need to define a new space (probability space). As a result, the integration will done on these legal and non-certain groups in an unconventional way. Thus, assume that the random variable that represents the position of the Brownian target is defined on a probability space
, where
is the sample space of all possible meeting points,
is the σ- algebra (the collection of all events (mutually exclusive events) that show the position of the target at any time) and
is the probability measure which used as a measure of an integrator factor into
in order to integration, but not the same way as a regular integration.
Theorem 3.1:
If is a given initial probability of the first meeting time and (
,
)
, then the expectation
is finite if:
and
are finite.
Proof:
The first meeting time between and the Brownian target
is a mutually exhaustive event with
(the first meeting time between
and the Brownian target). Hence, for any
we have:
Thus, we can find:
(4)
(4)
But, using the notation
we can get
(El-Hadidy et al. [Citation24,Citation25]), then
and also
Hence,
where
,
is the given initial probability of the first meeting time and
and
Thus,
is finite if :
and
are finite.
It is clear that the expected value of the first meeting time is smaller than the expected value of the first meeting time which has been obtained by El-Rayes et al. [Citation23] where
and
because in El-Rayes et al. [Citation23] and El-Hadidy et al. [Citation24,Citation25] the searchers repeat the searched distances many times tend to infinity in both sides of the real line. Thus, the model which studied here is more effective and applicable more than by the other models which were presented before by Reyniers [Citation1,Citation2], El-Rayes et al. [Citation23] and El-Hadidy et al. [Citation24,Citation25]. To make this model more effective we want to get some conditions as in the following Theorem 3.2.
Theorem 3.2.
The chosen search plan should satisfies and
, where
and
are linear functions.
Proof:
We shall prove the theorem for and the other case can be proved by similar way. If
, then
but for
we get
. Consequently,
(5)
(5)
Since the target starts its motion from a random point on the real line with drift
and variance
then for any
we have
where
is constant. This leads to,
(6)
(6)
where
. Also, in the left part of the real line we can get,
In (5) we have,
where
In addition, for any two positions of the Brownian target we have the probability,
is non-increasing with time
, where
because,
If
then
This leads to the probability
be a non-increasing.
Consider that where
is a sequence of independent identically distributed random variables and
. We define the following:
and
. We choose
and
. Thus, if
and since
is non-increasing with time
then we have
is non-increasing. Thus,
and by applying Lemma 1 in El-Hadidy et al. [Citation24,Citation25] we get:
.
Since, and
then
satisfies the renewal theorem (see Feller [Citation26]). Hence,
is bounded
by a constant. This leads to
Similarly, one can show that
in the right part.
The necessary and sufficient conditions, that shows the existence of a finite search plan, are equivalent to the condition , that is, sufficient from the direct consequence of Theorems 3.1, 3.2 and the following Theorem 3.3.
Theorem 3.3:
If there exists a finite search plan ( ,
)
, then
is finite.
Proof:
See El-Hadidy et al. [Citation24].
4. Calculating 
It is known that the Brownian motion is a limit of the simple Random Walk which has a Markov property. In addition, the Brownian motion is interpreted based on the Normal distribution. Therefore, we can exploit this fact to calculate depending on the probability of meeting the target at the time
provided with the probability of meeting it at the time
as in the following Theorem 4.1.
Theorem 4.1:
The expected value of the first meeting time for the Brownian target is given by:
(7)
(7)
where
and
are the distribution functions of the Normal random variables
and
, respectively.
Proof:
By using the knowing initial probability in (4), we get:
(8)
(8)
and since,
we can find that:
(9)
(9)
It is known that for the times
the random variable
has a normal distribution with mean 0 and variance
where
Thus, we can get:
(see Kelbaner [Citation27]). Since the first meeting is not done at the time
, then
where
is the distribution function of the Normal random variable
Similarly, we can calculate the probability:
Since the target starts its motion from a random point , then we can consider that
. Thus, in (8) we can get the approximate value of
as follows:
Since, and if we have
, then
. Consequently, one can get
where
. In addition,
thus it is easily to conclude that
. This can show that the integrals in (7), are indeed finite where the target is not evading the searching process.
5. Application
Assuming a rocket (target) fires from a random point (rocket launcher carries on lorry’s enemy) on the road (real line) and moves with a Brownian motion. The approximated value of the expected value of the first meeting time between one of the searchers and the rocket depends on the values of the distances that the each searcher should do them. Since, and
then we can let
and
where
and
such that
. Thus, let
and
then by compensation in (7) we get:
where
and
. From probability measure theory one can get,
Also, we know that , then if we let
then we have
Consequently,
After knowing the number of steps, one of the searcher will meet the target. Thus, if the target will be met after step number 10, then we have,
(10)
(10)
Let and let the different values of
and
are given by .
Table 1. Different values of and .
In (11) we find that the expected cost of the first meeting time between one of the searchers and the Brownian target is less than unit of time.
6. Conclusion
The coordinated linear search technique for a Brownian target on the real line has been presented, where the target initial position is given by a random variable . We found the conditions that make the expected value of the first meeting time between one of the searchers and the target is finite in Theorem 3.1 based on the continuity of the search plan. In Theorems 3.2, we presented that The chosen search plan should satisfies the conditions
and
, where
and
are linear functions. We calculated the approximated value for the expected value of the first meeting time. The effectiveness of this model is illustrated using a real-life application.
In future research, it seems that the proposed model will be extendible to the multiple searchers case by considering the combinations of movement of multiple targets.
Disclosure statement
No potential conflict of interest was reported by the authors.
ORCID
Alaa Awad Alzulaibani http://orcid.org/0000-0003-3742-8003
References
- Reyniers DJ. Coordinated search for an object on the line. Eur J Oper Res. 1996;95(3):663–670. doi: 10.1016/S0377-2217(96)00314-1
- Reyniers DJ. Coordinated two searchers for an object hidden on an interval. J Oper Res Soc. 1995;46(11):1386–1392. doi: 10.1057/jors.1995.186
- Mohamed A, Abou-Gabal H, El-Hadidy M. Coordinated search for a randomly located target on the plane. Eur J Pure Appl Math. 2009;2(1):97–111.
- Mohamed A, Fergany H, El-Hadidy M. On the coordinated search problem on the plane. Istan Univ J Sch Busin Admin. 2012;41(1):80–102.
- Kassem M, El-Hadidy M. Optimal Multiplicative Bayesian search for a lost target. Appl Math Comput. 2014;247:795–802.
- El-Hadidy MA. Optimal Spiral search plan for a randomly located target in the plane. Int J Oper Res. 2015;22(4):454–465. doi: 10.1504/IJOR.2015.068561
- El-Hadidy MA. Optimal searching for a Helix target motion. Sci China Math. 2015;58(4):749–762. doi: 10.1007/s11425-014-4864-5
- Mohamed A, Kassem M, El-Hadidy M. M-States search problem for a lost target with multiple sensors. Int J Math Oper Res. 2017;10(1):104–135. doi: 10.1504/IJMOR.2017.080747
- Mohamed AA, Abou Gabal HM, El-Hadidy MA. Random search in a bounded area. Int J Math Oper Res. 2017;10(2):137–149. doi: 10.1504/IJMOR.2017.081921
- El-Hadidy M. Fuzzy optimal search plan for N-Dimensional randomly moving target. Int J Computational Methods. 2016;13(6):1650038 (38 pages). doi: 10.1142/S0219876216500389
- El-Hadidy M. On Maximum Discounted Effort Reward search problem. Asia-Pacific J Oper Res. 2016;33(3):1650019 (30 pages). doi: 10.1142/S0217595916500196
- El-Hadidy M. On the existence of a finite linear search plan with random distances and velocities for a One-Dimensional Brownian target. Int J Oper Res. 2017. http://www.inderscience.com/info/ingeneral/forthcoming.php?jcode=ijor
- El-Hadidy MA. Existence of finite Parbolic Spiral search plan for a Brownian target. Int J Oper Res. 2017. http://www.inderscience.com/info/ingeneral/forthcoming.php?jcode;otherinfo>=ijor/otherinfo>.
- Kagan E, Ben-Gal I. Search and Foraging: Individual motion and Swarm Dynamics. Boca Raton (FL): CRC Press; 2015.
- Guerrier C, Holcman D. Brownian search for targets hidden in cusp-like pockets: Progress and Applications. Eur Phy J Spec Top. 2014;223(14):3273–3285. doi: 10.1140/epjst/e2014-02332-6
- Palyulin VV, Chechkin AV, Metzler R. Space-fractional Fokker–Planck equation and optimization of random search processes in the presence of an external bias. J Stat Mech Theor Exp. 2014;11:P11031. doi: 10.1088/1742-5468/2014/11/P11031
- Radmard S, Croft E. Active target search for high dimensional robotic systems. Auton Robots. 2017;41(1):163–180. doi: 10.1007/s10514-015-9539-8
- Stone LD, Royset JO, Washburn AR. Optimal search for moving targets, part of the International Series in Operations research & Management Science book series. Cham: Springer; 2016.
- El-Hadidy M, Abou-Gabal H. Coordinated search for a random Walk target motion. Fluctuation Noise Lett. 2018;17(1):1850002 (11 pages). doi: 10.1142/S0219477518500025
- Mohamed A, El-Hadidy M. Coordinated search for a conditionally deterministic target motion in the plane. Eur J Math Sci. 2013;2(3):272–295.
- Beck A. On the linear search problem. Israel J Math. 1964;2(4):221–228. doi: 10.1007/BF02759737
- Beck A. More on the linear search problem. Israel J Math. 1965;3(4):61–70. doi: 10.1007/BF02760028
- El-Rayes AB, Mohamed AA, Abou Gabal HM. Linear search for a brownian target motion. Acta Math Scientia J. 2003;23 (B)(3):321–327. doi: 10.1016/S0252-9602(17)30338-7
- Mohamed A, Kassem M, El-Hadidy M. Multiplicative linear search for a brownian target motion. Appli Math Model. 2011;35(9):4127–4139. doi: 10.1016/j.apm.2011.03.024
- El-Hadidy M. Searching for a d-dimensional Brownian target with multiple sensors. Int J Math Oper Res. 2016;9(3):279–301. doi: 10.1504/IJMOR.2016.10000114
- Feller W. An Introduction to probability theory and its applications. Vol II. New York: Wiley; 1966.
- Klebaner FC. Introduction to stochastic calculus with applications. London: Imperial College Press; 1998.