
 ?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.
?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.ABSTRACT
This paper presents the effect of Albedo on the behaviour of the fourth body in the CR4BP with the variation of masses of all bodies. By using Meshcherskii transformation, we have determined the equations of motion and found how Jacobi-integral constant varies with time due to variable masses. We have plotted the Lagrangian points, the periodic orbits, Poincaré surface of sections and basins of attraction for four cases (a. Classical Case, b. Variation of mass, c. Solar radiation pressure effect, d. Albedo effect). And then, we checked the stability of Lagrangian points at the Albedo effect only and got all the points are unstable.
1. Introduction
In the restricted four-body problem (R4BP), three bodies are placed at vertices of a triangle, they are moving under their mutual gravitational attractions around their common centre of mass and fourth body is moving in the space under the influence of the primaries but not influencing them.
Many mathematicians and physicists have studied this model. Moulton [Citation1] evaluated the particular solution of the four-body problem. Simo [Citation2] studied linear stability of relative Lagrangian solutions in the four-body problem. Majorana [Citation3] checked the stability of the Lagrangian points which depends on the values of primary masses. Michalodmitrakis [Citation4] generalized R3BP to R4BP in which he studied about the equilibrium points, regions of possible motion and periodic orbits. Baltagiannis and Papadakis [Citation5] investigated R4BP and got the equilibrium points depending the primaries masses. Abdullah [Citation6] determined the periodic orbits around Lagrangian points in three cases (i) the spherical shape of all the primaries, (ii) one of the primaries as oblate body, (iii) two of the primaries as oblate bodies. Papadakis [Citation7] studied the 3D symmetric periodic orbits of R4BP, through simple vertical bifurcation from plane orbits.
And also many scientists have studied about the solar radiation pressure in R4BP. Kalvouridis et al. [Citation8] studied R4BP with the effect of solar radiation pressure but not considered the albedo effect. Papadouris et al. [Citation9,Citation10] studied the existence, the location, stability and periodic orbits of the equilibrium points on and out of the orbital plane in the photo-gravitational R4BP. Singh and Vincent [Citation11,Citation12] studied equilibrium points in CR4BP with the effect of solar radiation pressure and also not considered the albedo effect.
Many mathematicians studied CR3BP and CR4BP when the masses vary with time as Jeans [Citation13], Meshcherskii [Citation14], Shrivastava et al. [Citation15], Lichtenegger [Citation16], Singh et al. [Citation17–21], Lukyanov [Citation22], Zhang et al. [Citation23], Abouelmagd et al. [Citation24], Ansari et al. [Citation25–30], Alhussain [Citation31,Citation32].
The sun is the greatest source of radiations in our solar system. The radiations emitted by the sun, some radiations absorbed by the planets and some radiations reflected back into the space. This reflected radiations are known as Albedo.
The circular as well as elliptic case of restricted three-body problem taking into account albedo effect is studied by Anselmo et al. [Citation33], Bhanderi et al. [Citation34], Harris et al. [Citation35], Idrisi et al. [Citation36–40], MacDonald et al. [Citation41], Pontus et al. [Citation42], Rocco [Citation43].On the other hand, many scientists illustrated the basins of attraction in both CR3BP and CR4BP cases as Douskos [Citation44], Kumari et al.[Citation45], Zotos [Citation46,Citation47], Ansari [Citation28–30].
Taking on account of the above literature, we have performed the motion of the fourth body in CR4BP in which the masses of the all four body vary and also albedo effect is considered. This study contains various sections. First, we have formulated the equations of motion and also determined the expression for the variation of Jacobi Integral constant. Second, plotted numerically the Lagrangian points, periodic orbits, Poincaré surface of sections and basins of attraction in four cases. Third, checked the stability of the all points under the effect of perturbations. And finally, concluded the problem.
2. Equations of motion
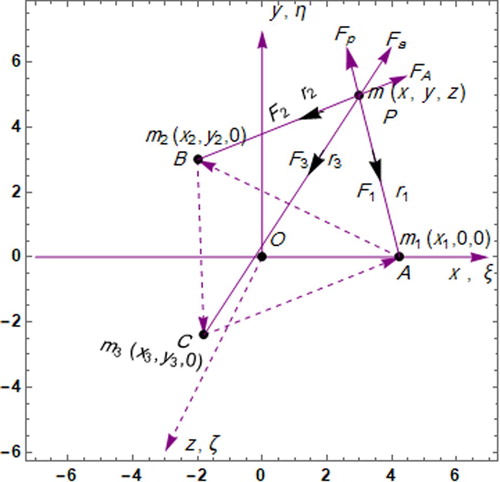
Let ,
,
and
be four variable masses in which three primaries
,
and
are placed at an equilateral triangle ABC with side ℓ. They are moving under their mutual gravitational force around their common centre which is considered as origin O. Here
is taken as the solar radiation pressure
due to which
and
are producing Albedo
and
, respectively (i.e. Albedo = (radiation reflected back into space)/(incident radiation)). The fourth body
is moving in space under gravitational forces
and
of the primaries but not influencing them. The total force on infinitesimal body will be
, where
Let the coordinates of
,
,
and
in the rotating frame be
and
, respectively (Figure ). Let the inertial frame be coincident with the rotating frame which has angular velocity
Following the procedure given in Abouelmagd et al. [Citation24] and Alhussain [Citation32], we can write the equations of motion of the fourth body in the rotating coordinate system when the variation is non-isotropic with zero momentum as
(1)
(1) where
are the distances from the primaries to the fourth body, respectively,
. Using Meshcherskii transformation
where
are constants for
and
shows the relation between both times t and τ.
The system (Equation1(1)
(1) ) becomes
(2)
(2) where
Prime (
) is w.r.to τ. Putting unit of mass, distance and time
such that
New parameter as
(all the masses of the primaries are taken as equal), where υ is the ratio of the mass.
Figure 1. The geometric configuration of the problem in CR4BP with Albedo.
Finally, (Equation2(2)
(2) ) becomes
(3)
(3) where
and
,
,
If there are constant masses, then there is a constant motion (i.e. Moulton [Citation48]), the Jacobi Integral constant defined as
(4)
(4) Multiplying in the first part of (Equation3
(3)
(3) ) by
, in the second part of (Equation3
(3)
(3) ) by
and in the third equation of (Equation3
(3)
(3) ) by
and add and using Equation (Equation4
(4)
(4) ), we get the variation of the Jacobi Integral constant as
(5)
(5) where
is the Jacobi Integral Constant.
3. Computational work
Here, plotted numerically the Lagrangian points, the periodic orbits, the Poincaré surfaces of section and the basins of attraction for four different cases by using Mathematica software:
Classical case (i.e.
),
Variation of masses (i.e.
Solar radiation pressure (i.e.
Albedo effect (i.e.
3.1. Lagrangian points during motions
The Lagrangian points are the solutions of , and
but the solutions of these equations represent the locations during in-plane motions when
, (Figure ) and represent the locations of the out of planes when
, (Figure ) and
,(Figure ), where
(6)
(6)
(7)
(7)
(8)
(8)
Figure 2. The positions of Lagrangian points during in-plane motion (i.e. ) in four cases.
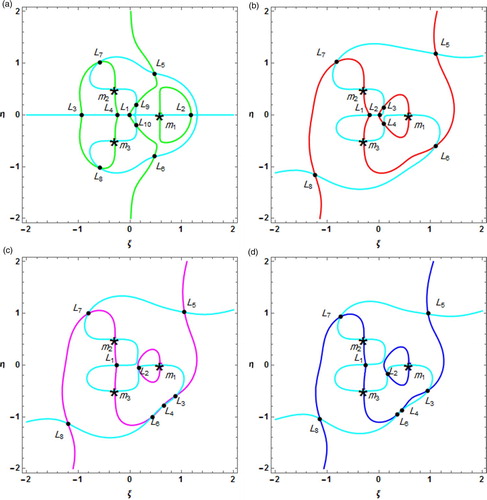
Figure 3. The positions of Lagrangian points during out of plane motion (i.e. ) in four cases.
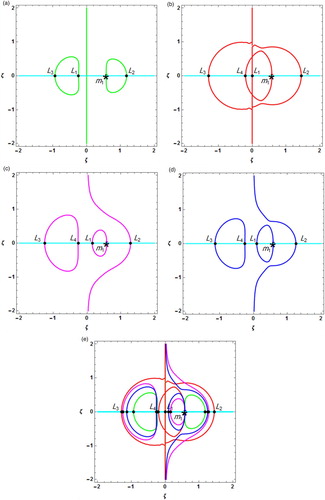
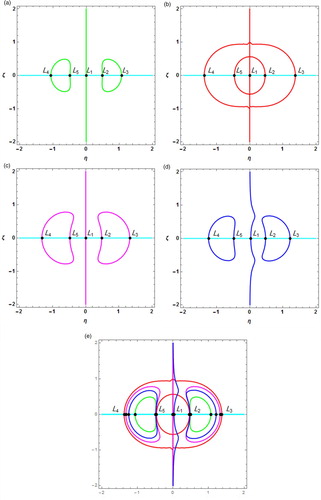
Figure 4. The positions of Lagrangian points during out of plane motion (i.e.
) in four cases.
3.1.1. During in-plane motion (i.e. ) positions of Lagrangian points
During in-plane motion, we have plotted graphs for the locations of the Lagrangian points in four cases. We found ten Lagrangian points in which four points () are collinear and six points (
) are non-collinear and also (
), (
), (
) are symmetrical with respect to the ξ-axis in the classical case (Figure (a)). It is observed that the Lagrangian points (
) and (
) exist inside and outside of the Lagrangian configuration, respectively. In the variable mass case, we found eight Lagrangian points (Figure (b)) in which two points
are collinear but rest six points
are non-collinear. Here only (
) are symmetrical and rests points are non-symmetrical. It is observed that the Lagrangian points (
) and (
) exist inside and outside of the Lagrangian configuration, respectively. In the solar radiation case, we found eight Lagrangian points (Figure (c)) in which two points
are collinear and six points
are non-collinear. It is observed that the Lagrangian points (
) and (
) exist inside and outside of the Lagrangian configuration, respectively. On the other hand with the Albedo effects, we found eight Lagrangian points (Figure (d)) in which only one point (
) is on the ξ-axis and rest seven points are non-collinear. Here also the Lagrangian points (
) and (
) exist inside and outside of the Lagrangian configuration, respectively. In all the figures, black dot and black stars denote the locations of Lagrangian points and the primaries, respectively.
3.1.2. During out of plane (i.e. and ) the locations of Lagrangian points
During out of plane (i.e. ), we found three Lagrangian points on the ξ-axis in the first case (Figure (a)). The points (
) and
lie left and right side of the origin, respectively. In the variable mass case, we found four Lagrangian points on the ξ-axis (Figure (b)). The points (
) and
lie left and right side of the origin, respectively, but point
lie at the origin. In the solar radiation case, we found four Lagrangian points on the ξ-axis (Figure (c)). The points (
) and
lie left and right side of the origin, respectively. On the other hand with the albedo effect, we found four Lagrangian points on the ξ-axis (Figure (d)). The points (
) and
lie left and right side of the origin, respectively. It is observed from the Figure (e) that Lagrangian points are moving away from the origin from the classical case to the variable mass case and then towards the origin in the other cases. The black star denotes the location of the primary
.
On the other hand, during the out of plane (i.e. ), we found five Lagrangian points (Figure ) in all four cases. The points (
) and
lie left and right side of the origin, respectively, but the point
lie at the origin. It is also observed from the Figure (e) that Lagrangian points are moving away from the origin from the classical case to the variable mass case and then towards the origin in the other cases.
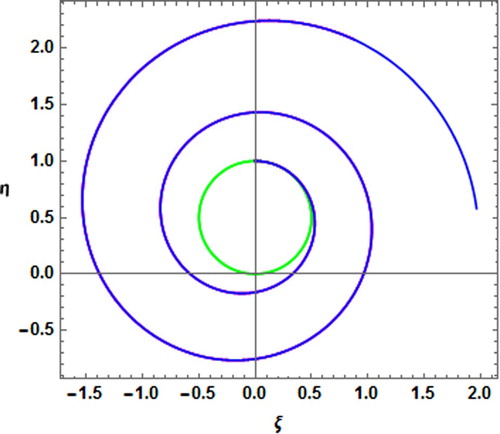
3.2. Periodic orbits
Here, periodic orbits studied in four cases. In the classical case, we found that the orbit is periodic (in green colour) but in the other three cases orbits are not periodic (Figure ). In these three cases, orbits are overlapped but they have time difference in orbits, i.e. very small effect on the periodic orbits due to these perturbations.
Figure 5. Periodic orbits in four cases: (a). Green, (b). Red, (c). Magenta, (d). Blue. But Red, Magenta and Blue are overlapped.
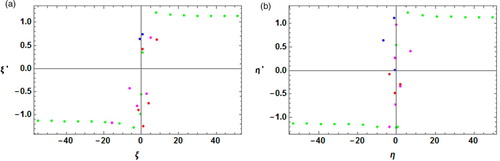
3.3. Poincaré surface of section
This section is devoted to illustrate the Poincaré surfaces for four cases in both the -plane (Figure (i)) and the
-plane (Figure (ii)). We found that in both planes, the surfaces have the same discrete type pattern.
Figure 6. Poincaré surface of sections: (a). Classical case (Green),(b). variable mass case (Red), (c). radiation pressure (Magenta), (d). Albedo effect (Blue).
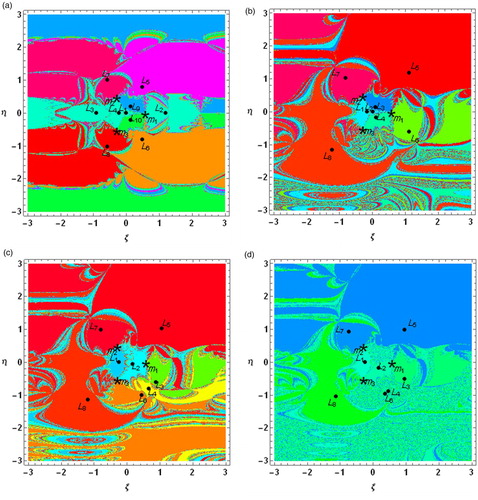
3.4. Basins of attraction
The N-R method is used very frequently for solving non-linear system of equations because it shows much better rate of convergence. And hence our aim is to draw the basins of attraction for CR4BP by using the N-R iterative method for the different cases (a. Classical Case, b. Variation of mass case, c. Solar radiation pressure effect, d. Albedo effect). The iterative algorithm of our problem is given by
(9)
(9) where
are the coordinates of the
step of the N-R process. If the initial point converges to one of the Lagrangian points then the point
is a member of the basin of attraction of the root. This stops when the successive process converges to a point. In the classical case (Figure (a)),
and
represent mint green colour regions,
represents light purple colour region,
represents orange colour region,
represent red colour regions,
represents light blue colour region and
represents light green colour region. The basins of attraction corresponding to the Lagrangian points
extend to infinity but the basins of attraction corresponding to the Lagrangian points
cover finite area. In the variable mass case (Figure (b)),
and
represent cyan colour regions,
represents light blue colour region,
represents mint green colour region,
represents light green colour region and
represent red colour regions. The basins of attraction corresponding to the Lagrangian points
cover finite areas but corresponding to the Lagrangian points
extend to infinity. In the solar radiation pressure case (Figure (c)),
,
,
,
,
and
represent light blue, cyan, light green, yellow, orange and red colour regions, respectively. The basins of attraction corresponding to the all Lagrangian points
and
extend to infinity. On the other-hand, in the case of albedo (Figure (d)),
,
,
and
represent cyan colour, mint green colour, light green colours and light blue colour regions, respectively but
and
have mixed colour regions.
Figure 7. The basin of attraction for the (a): classical case, (b): variable mass case, (c): solar radiation pressure case, (d): Albedo case.
4. Linear stability
We check the stability of Lagrangian points under the effect of Albedo by taking in system (Equation3
(3)
(3) ), we get
(10)
(10) where
and
are displacements of fourth body from the Lagrangian point.
To solve system (Equation10(10)
(10) ), let
where
and
are constants. Then system (Equation10
(10)
(10) ) become
(11)
(11) The system (Equation11
(11)
(11) ), will be solution for
and
if
which is equivalent to
(12)
(12) From the solution of Equation (Equation12
(12)
(12) ), we found that λ has complex values and at least one of them has a positive real value. Hence, all the Lagrangian points are unstable (Table ).
Table 1. Characteristic roots corresponding to each Lagrangian points in in-plane motion
5. Conclusion
This paper studied the effect of Albedo in CR4BP with variable masses. We determined the equations of motions which are different from the classical case by the variation parameters and k and the radiations effect
,
and
and also the expression for the variation of Jacobi integral constant have been evaluated which is also depending on the variation parameter
. We have plotted all the figures in four different cases by using the Mathematica software. The Lagrangian points during in-plane motion (Figure ), we found ten Lagrangian points in the classical case which meet the result of Baltagiannis [Citation9], while in the cases variable mass, solar radiation pressure and albedo we found eight Lagrangian points. During out-of-plane motions (i.e.
)(Figure ), we found three Lagrangian points in the classical case and four Lagrangian points in rest three cases. It is observed from Figure (e) that Lagrangian points are moving away from the origin from the classical case to the variable mass case and then towards the origin in the other cases.
On the other hand, during the out of plane (i.e. ), we found five Lagrangian points (Figure ) in all four cases. It is also observed from Figure (e) that Lagrangian points are moving away from the origin from the classical case to the variable mass case and then towards the origin in the other cases. In these four cases, the periodic orbits have been drawn ( Figure ). In the classical case, orbit is periodic but in the other three cases, orbits are not periodic. It is observed that in three cases orbits are overlapped but they have time difference. The poincaré surface of sections have been determined in two phase spaces (
, Figure (i) and
, Figure (ii)). In both the cases, surfaces are discrete type with a similar pattern.
The N-R basins of attraction have studied in four different cases (Figure (a)–(d)). We used the colour code for the Lagrangian points on the -plane. Finally, we have examined the stability of Lagrangian points in CR4BP under the effect of Albedo only and got all the Lagrangian points unstable.
Acknowledgments
We are thankful to the Deanship of Scientific Research, Majmaah University, Kingdom of Saudi Arabia, for providing all the research facilities in completion of this research work with grant number 37/29.
Disclosure statement
No potential conflict of interest was reported by the author.
ORCID
Ziyad A. Alhussain http://orcid.org/0000-0001-8593-0239
References
- Moulton FR. On a class of particular solutions of the problem of four bodies. Trans Am Math Soc. 1900;1:17–29.
- Simo C. Relative equilibrium solutions in the four body problem. Celest Mech. 1978;18:165–184.
- Majorana A. On a four-body problem. Celest Mech. 1981;25:267–270.
- Michalodmitrakis M. The circular restricted four-body problem. Astrophys Space Sci.. 1981;75:289–30.
- Baltagiannis A, Papadakis KE. Equilibrium points and their stability in the restricted four body problem. Int J Bifurcat Chaos. 2011;21(8):2179–2193. doi: 10.1142/S0218127411029707.
- Abdullah A. Periodic orbits around Lagrangian points of the circular restricted four-body problem. Invertis J Sci Technol. 2014;7(1):29–38.
- Papadakis KE. Families of three-dimensional periodic solutions in the circular restricted four-body problem. Astrophys Space Sci. 2016;361:129.
- Kalvouridis TJ, Arribas M, Elipe A. Dynamical properties of the restricted four-body problem with radiation pressure. Mech Res Commun. 2006;33:811–817.
- Papadouris JP, Papadakis KE. Equilibrium points in the photogravitational restricted four-body problem. Astrophys Space Sci. 2013;344:21–38.
- Papadouris JP, Papadakis KE. Periodic solutions in the photogravitational restricted four-body problem. MNRAS. 2014;442:1628–1639.
- Singh J, Vincent AE. Equilibrium points in the restricted four-body problem with radiation pressure. Few-Body Syst. 2016;57:83–91.
- Singh J, Vincent AE. Out-of-plane equilibrium points in the photogravitational restricted four-body problem with oblateness. British J Math Comput Sci. 2016;19(5):1–15.
- Jeans JH. Astronomy and cosmogony. Cambridge: Cambridge University Press; 1928.
- Meshcherskii IV. Works on the mechanics of bodies of variable mass. GITTL Moscow; 1952.
- Shrivastava AK, Ishwar B. Equations of motion of the restricted problem of three bodies with variable mass. Celest Mech. 1983;30:323–328.
- Lichtenegger H. The dynamics of bodies with variable masses. Celest Mech.. 1984;34:357–368.
- Singh J. Effect of perturbations on the location of equilibrium points in the restricted problem of three-bodies with variable mass. Celest Mech. 1984;32:297–305.
- Singh J, Ishwar B. Effect of perturbations on the stability of triangular points in the restricted problem of three-bodies with variable mass. Celest Mech. 1985;35:201–207.
- Singh J. Photogravitational restricted three-body problems with variable mass. Indian J Pure Appl Math. 2003;32(2):335–341.
- Singh J, Leke O. Stability of photogravitational restricted three-body problem with variable mass. Astrophys Space Sci. 2010;326(2):305–314.
- Singh J, Leke O. Existence and stability of equilibrium points in the Robe's restricted three-body problem with variable masses. Int J Astron Astrophys. 2013;3:113–122. doi.org/10.4236/ijaa.2013.32013.
- Lukyanov LG. On the restricted circular conservative three-body problem with variable masses. Astron Lett. 2009;35(5):349–359.
- Zhang MJ, Zhao CY, Xiong YQ. On the triangular libration points in photo-gravitational restricted three-body problem with variable mass. Astrophys Space Sci. 2012;337:107–113. doi:10.1007/s10509-011-0821-8.
- Abouelmagd EI, Mostafa A. Out of plane equilibrium points locations and the forbidden movement regions in the restricted three-body problem with variable mass. Astrophys Space Sci. 2015;357:58. doi:10.1007/s10509-015-2294-7
- Ansari AA. Stability of the equilibrium points in the photogravitational circular restricted four-body problem with the effect of perturbations and variable mass. Sci Int. 2016;28:859–866.
- Ansari AA. The photogravitational circular restricted four-body problem with variable masses. J Eng Appl Sci. 2016;3(2):30–38.
- Ansari AA. The circular restricted four-body problem with variable masses. Nonlinear Sci Lett A. 2017;8(3):303–312.
- Ansari AA, Kellil R, Alhussain ZA. Locations and stability of the libration points in the CR3BP with perturbations. J Math Analysis. 2017;8(5):131–144.
- Ansari AA, Kellil R, Alhussain ZA. The effect of perturbations on the circular restricted four-body problem. J Math Computer Sci. 2017;17(3):365–377.
- Ansari AA, Alhussain ZA, Prasad S. Circular restricted three-body problem when both the primaries are heterogeneous spheroid of three layers and infinitesimal body varies its mass. J Astrophys Astr. 2018;39:57.
- Alhussain ZA. The yarkovsky effect on the circular restricted three-body problem with perturbations. Adv Differ Equ Control Process. 2018;19(3):156–168.
- Alhussain ZA. Effect of Poynting-Robertson drag on the circular restricted three-body problem with variable masses. J Taibah Univ Sci. 2018;12(4):455–1463.
- Anselmo L, Farinella P, Milani A, Nobili AM. Effects of the Earth reflected sunlight on the orbit of the LAGEOs satellite. Astron Astrophys. 1983;117(1):1–3.
- Bhanderi DDV, Bak T. Modeling Earth Albedo Satellites in Earth orbit. AIAA Guidance, Navigation and Control Proceedings, San Franciso, CA, 2005
- Harris M, Lyle R. Spacecraft Radiation Torque. NASA Space Vehicle Design Criteria (Guidance and Control) NASA SP-8027, 1969; October 1–37
- Idrisi M Javed, Ullah M Shahbaz. Non-collinear libration points in ER3BP with albedo effect and oblateness. J Astrophys Astro. 2018;39(3):10. doi:10.1007/s12036-018-9520-y
- Idrisi M Javed. A study of libration points in CR3BP under albedo effect. Int J Adv Astro. 2017;5(1):01–06.
- Idrisi MJaved. A study of libration points in modified CR3BP under albedo effect when smaller primary is an ellipsoid. J Astronautical Sci. 2017;64(4):379–398. doi:10.1007/s40295-017-0115-7.
- Idrisi MJaved, Ullah MShahbaz. Restricted three-body problem with albedo effect when smaller primary is an oblate spheroid. Global J Sci Frontier Res. 2017;17(5):09–24.
- Idrisi MJaved. A study of libration points in CR3BP under albedo effect. Int J Adv Astron. 2017;5(1):01–06.
- MacDonald M, McInnes C. Solar sail science mission applications and advancement. Adv Space Res. 2011;48:1702–1716.
- Pontus A. Attitude estimation from magnometer and earth-albedo-corrected coarse Sun sensor measurements. J Acta Astonautica. 2005;56:1–2.
- Rocco EM. Evaluation of the terestrial Albedo-Applied to some scientific missions. Space Sci Rev. 2009;151:135–147. DOI 10.1007/s11214-009-9622-6.
- Douskos CN. Collinear equilibrium points of Hill's problem with radiation pressure and oblateness and their fractal basins of attraction. Astrophys Space Sci. 2010;326:263–271.
- Kumari R, Kushvah BS. Stability regions of equilibrium points in the restricted four-body problem with oblateness effects. Astrophys Space Sci. 2014;349:693–704.
- Zotos EE. Fractal basins of attraction in the planar circular restricted three-body problem with oblateness and radiation pressure. Astrophys Space Sci. 2016;181:17.
- Zotos EE. Revealing the basins of convergence in the planar equilateral restricted four-body problem. Astrophys Space Sci. 2017;362:2.
- Moulton FR. An introduction to celestial mechanic. 2nd ed. New York: Dover; 1914.