
 ?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.
?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.Abstract
This paper analyzes the stability, uniformly stability, asymptotically stability, boundedness, uniformly boundedness and square integrability of solutions of a system of differential equations of second order with variable delay by applying the direct method of Lyapunov- Krasovskii. By means of a new Lyapunov-Krasovskii functional, we simplify and extend some previous work that is found in the recent literature. Finally, the validity and applicability of the proceeded results are indicated by some numerical examples applying MATLAB-Simulink. By the results of this paper, we can obtain the results of Omeike et al. [Stability and boundedness of solutions of certain vector delay differential equations. J Nigerian Math Soc. 2018;37(2):77–87], Theorem 1.1 and Theorem 1.2, under weaker conditions. In addition, we establish two new results on the uniformly stability and integrabilty of solutions the considered equation. Finally, in particular cases, the applicability of the results of this paper can be shown by two new examples. These are the contribution of this paper to the subject and the relevant literature.
1. Introduction
In the past few decades, qualitative analysis of solutions of ordinary or delay differential equations of second order have attracted increasing attention due to its wide application in physics, engineering, signal processing, medicine, population dynamics and so on. Due to these facts, stability and some related concepts as important index of control systems receive considerable attention. A large number of papers are devoted to various kinds of stability, boundedness, convergence and some other properties of ordinary and delay differential equations and systems of differential equations [Citation1–61]. To the best of our information, the results of these papers are derived by means of the Lyapunov or the Lyapunov- Krasovskii direct method applying various Lyapunov functions or Lyapunov- Krasovskii functionals. In this paper, we are not interested in the details of obtained results and used methods. However, during qualitative analysis of that differential equations, we should point out that suitable candidate function(s) or functional(s) are very effective for construction of stronger and weaker conditions.
In Omeike et al. [Citation27], Omeike et al. considered the following Lienard delay differential equation (DDE) with the variable delay :
(1)
(1) in which
,
.
Omeike et al. [Citation27] proved the following two theorems on the asymptotically stability and uniformly boundedness, uniformly ultimately boundedness of solutions, respectively, when and
The results of Omeike et al. [Citation27] are given by the following theorems.
Let
Theorem 1.1
[Citation27]
Consider DDE (1), let and suppose that:
is a positive constant,
the matrices
and
(Jacobian matrix of
are symmetric and positive definite, and furthermore that the eigenvalues
and
of
and
respectively, satisfy
where
and
are finite constants;
the matrices
and
commute.
Then the zero solution of DDE (1) is asymptotically stable provided that
Now, let
Theorem 1.2
[Citation27]
If, in addition to the conditions and
of Theorem 1.1, the inequality
holds, then the solutions of DDE (1) are uniformly bounded and uniformly ultimately bounded provided the constant
satisfies
DDE (2) is the vector version of the below nonlinear differential equations of second order:
We can write DDE (2) as the below differential system:
(3)
(3) where
is the Jacobian matrix of
defined by
and
are the components of
and
respectively,
It is assumed that the Jacobian matrix exists and is continuous. Let
Then, we define
and
For brevity in notation, if a function is written without its argument, we mean that the argument is always For example,
represents
The aim of this paper is to obtain the results of [Citation27] under weaker conditions and give some additional new results. Besides, the validity and applicability of the results to be proceed are indicated by some numerical examples applying MATLAB-Simulink. These are contributions of the results of this paper to be given below.
2. Basic definitions and fundamental results
For a given number let
denote the space of continuous functions mapping the interval
into
and for
denotes the set of
in
for which
For any continuous function
defined on
any fixed
the symbol
denotes the function
We consider the autonomous delay differential equation (DDE):
(4)
(4) It is assumed that
is a functional defined for every
in
and
is the right side derivative of
We say
is a solution of DDE (4) with the initial condition
in
at
if there is a
such that
is a function from
Lemma 2.1
[Citation8]
Suppose Let
be a continuous functional defined on
with
and let
be a function, non-negative and continuous for
as
with
If for all
in
then the zero solution of DDE (4) is stable.
Let be a set of all functions
where
If
is the largest invariant set in
then the solution
of DDE (4) is asymptotically stable.
Let us consider the following non-autonomous delay differential equation (DDE):
(5)
(5) where
is a continuous mapping,
and we suppose that
takes closed bounded sets into bounded sets of
Here
is the Banach space of continuous function
with supremum norm,
is the open
-ball in
Let
be the set of
such that
We denote by
the set of all functions
such that
where
is large enough.
Definition 2.1
[Citation4]
A continuous function with
if
and
strictly increasing is a wedge. (We denote wedges by
or
, where
is an integer.)
Definition 2.2
[Citation4]
Let be an open set in
with
A function
Theorem 2.1
[Citation4]
Suppose that there is a continuous Lyapunov-Krasovskii for DDE (5) and wedges satisfying the following:
(where
and
are wedges);
Then the zero solution of DDE (5) is uniformly stable.
Theorem 2.2
[Citation50]
Suppose that there exists a continuous Lyapunov-Krasovskii functional defined for all
where
denotes the families of continuous increasing functions), and are positive for
and
as
Then, the solutions of DDE (5) are uniformly bounded.
3. Qualitative results for solutions
In this section, we ensure the main problem of this paper.
3.1. Hypotheses
Suppose the following hypotheses hold:
There are positive constants
and
such that the symmetric matrix
satisfies
There are some positive constants
and
such that
is symmetric and
for all
is a positive constant,
There is a continuous and non-negative function
such that
where
is space of integrable Lebesgue functions.
Lemma 3.1
[Citation27]
If is a real symmetric
-matrix and
then for any
we have
where
and
are the least and the greatest eigenvalues of the matrix
Lemma 3.2
[Citation27]
Let be a continuously differentiable vector function with
Then
Lemma 3.3
[Citation27]
Let be a continuously differentiable vector function with
Then
Proof:
It is clear that
=
Then we have
3.2. Main results
Let
Our first result is the following theorem.
Theorem 3.1:
Let hypotheses and
hold. If
holds, then the zero solution of DDE (2) is uniformly stable and asymptotically stable.
Proof:
We define a continuously differentiable Lyapunov-Krasovskii functional by
where
is a positive constant, and it is chosen later.
It is clear that By Lemmas 3.1–3.3, it follows that
where
By the similar procedure, we can derive that
Then, we can find a continuous function
such that
The time derivative of the Lyapunov-Krasovskii functional
along any solution of DDS (2) is given by
It is clear that
and
Hence, we have
The assumptions
and the inequality
(with
and
are real numbers) combined with the classical Cauchy-Schwartz inequality leads
Then
Let
Hence, this equality implies
If
then there exists a positive constant
such that
This inequality shows that the time derivative of the Lyapunov-Krasovskii functional
is negative semidefinite. Hence, we can conclude that the zero solution of DDE (2) is uniformly stable. On the same time, the zero solution of DDE (2) is also stable.
We now consider the set defined by
If we apply the LaSalle’s invariance principle, then we observe that
implies that
Hence, DDS (3) and together
necessarily, implies
Since then
is a vector. This equality can be hold if and only if
Hence,
so that
Therefore, we have
In fact, this result shows that the largest invariant set contained in the set
is
Therefore, we can conclude that the zero solution of DDE (2) is asymptotically stable. This result completes the proof of Theorem 3.1.
Corollary 3.1:
In the light of the assumptions of Theorem 3.1, it can be proceeded that all solutions of DDE (2) is uniformly bounded. We omit the details of the proof.
Theorem 3.2:
If assumptions and
hold, then the first derivatives of the solutions of DDE (2) are square integrable when
Proof:
We now give our attention to the Lyapunov-Krasovskii which is used in the proof of Theorem 3.1.
It is known from Theorem 3.1 that
Integrating this inequality from
to
we have
Hence, it is clear that
Since
is positive definite, then we can assume
Hence, we can derive
Then
This result completes the proof of Theorem 3.2.
Theorem 3.3:
If the assumptions of Theorem 3.1 hold, then all solutions of DDE (2) and their first order derivatives are bounded as when
.
Proof:
We again consider the estimates
and
which can be found in the former proofs.
Then, in view of these inequalities, we can conclude that
This inequality competes the proof of Theorem 3.3.
Let
Our fourth and the last result is the following theorem.
Theorem 3.4:
If assumptions hold, then there exists a positive constant
such that all solutions DDE (2) satisfy the inequalities
as
when
Proof: We re-consider the Lyapunov-Krasovskii functional, which is defined in Theorem 3.1. It is clear that
Since
, then the time derivative of the function
can be revised as follows
Hence, it is clear that
Integrating the last estimate from
to
we have
Then, it can be derived that
Let
Thus, we can conclude that
This completes the proof of Theorem 3.3.
Remark 1:
In the proof of Theorem 3.3, without using the Gronwall-Bellman [Citation1] inequality, we proved the bounded result. In fact, in Theorem 3.3, we have weaker conditions than that can found in literature and delete some reasonless of the conditions therein. This the positive effect of assumption in the proof.
Corollary 3.2:
In the light of the assumptions of Theorem 3.3, all solutions of DDE (2) is uniformly bounded (see, Theorem 2.2, also Yoshizawa [Citation50]).
4. Illustrative examples
In this section, in the particular cases, two numerical examples are presented to demonstrate the accuracy and applicability of the obtained results. The graphs of the solutions of the given examples are displayed by MATLAB-Simulink.
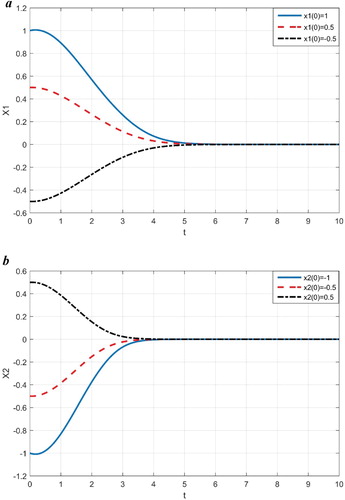
Example 4.1:
In the particular case of DDE (2), we consider the following non-linear DDE with the variable delay,
(6)
(6) It is clear that
where
and the variable delay
satisfies
Next, as eigenvalues of the matrix we have
and
We can derive
Next, the Jacobian matrix of
is
Hence
Thus, all hypotheses
and
of Theorem 2.1 hold. In addition, since
then
that is,
holds. For the particular case of DDE (2) when
, we give DDE (6) in Example 4.1. Then, it can be seen that the zero solution of DDE (6) is uniformly stable, asymptotically stable, and all solutions of DDE (6) are uniformly bounded, their first derivatives are square integrable. Besides, all solutions of DDE (6) and their first order derivatives are bounded as
(see ).
Figure 1. (a) Orbits of x1 (t) for Example 4.1. (b) Orbits of x2 (t) for Example 4.1.
Now, let
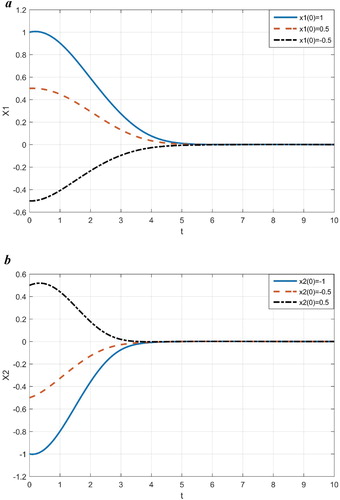
Example 4.2:
In the particular case of DDE (2), we now consider the following DDE with the variable delay,
(7)
(7) It is clear that
Further, we proceed
that is,
Thus, all the conditions of Theorem 3.2 are hold. For the particular case of DDE (2), we give DDE (7) in Exampe 4.2. Then, all solutions of DDE (7) are bounded as and also uniformly bounded (see ).
Figure 2. (a) Orbits of x1 (t) for Example 4.2. (b) Orbits of x2 (t) for Example 4.2.
5. Conclusion
In this paper, we define a Lyapunov-Krasovskii functional to derive new sufficient conditions for the qualitative analysis of solutions; stability, uniformly stability, asymptotically stability, boundedness, uniformly boundedness and square integrability of solutions of a kind of a system of non-linear differential equations of second order with variable delay. We prove four new theorems on the mentioned properties of solutions. Here, the derived sufficient conditions are expressed in terms of that system non-linear of differential equations. By this work, we not only weaken and delete some reasonless conditions of the related theorems in [Citation27], but also improve the results of [Citation27]. That is, we obtain the results of [Citation27] under weaker conditions. At the same time, in addition, we obtain new results on the uniformly stability and integrabilty of solutions of the considered system. Further, two examples are given to illustrate the validity and feasibility of the main results of this paper.
Contribution
All the authors have equal contribution in this paper and there is no competing interest.
Disclosure statement
No potential conflict of interest was reported by the authors.
ORCID
Cemil Tunç http://orcid.org/0000-0003-2909-8753
References
- Ademola AT, Ogundare BS, Ogundiran MO, et al. Periodicity, stability, and boundedness of solutions to certain second order delay differential equations. Int J Differ Equ. 2016; Art. ID 2843709:1–10.
- Ahmad S, Rama Mohana Rao M. Theory of ordinary differential equations. With applications in biology and engineering. New Delhi: Affiliated East-West Press Pvt. Ltd.; 1999.
- Burton TA. On the equation x′′ + f (x) h (x′) x′ + g (x)=e (t). Ann Mat Pura Appl. 1970;85:277–285.
- Burton TA. Stability and periodic solutions of ordinary and functional differential equations. Corrected version of the 1985 original. Mineola (NY): Dover Publications, Inc; 2005.
- Caldeira-Saraiva F. The boundedness of solutions of a Liénard equation arising in the theory of ship rolling. IMA J Appl Math. 1986;36(2):129–139.
- Cantarelli G. On the stability of the origin of a non-autonomous Lienard equation. Boll Un Mat Ital A. 1996;7(10):563–573.
- Gao SZ, Zhao LQ. Global asymptotic stability of generalized Lienard equation. Chin Sci Bull. 1995;40(2):105–109.
- Hale J. Sufficient conditions for stability and instability of autonomous functional-differential equations. J Differ Equ. 1965;1:452–482.
- Hara T, Yoneyama T. On the global center of generalized Lienard equation and its application to stability problems. Funkcial Ekvac. 1988;31(2):221–225.
- Heidel JW. Global asymptotic stability of a generalized Liénard equation. SIAM J Appl Math. 1970;19(3):629–636.
- Huang LH, Yu JS. On boundedness of solutions of generalized Lienard’s system and its application. Ann Differ Equ. 1993;9(3):311–318.
- Jitsuro S, Yusuke A. Global asymptotic stability of nonautonomous systems of Liénard type. J Math Anal Appl. 2004;289(2):673–690.
- Kato J. A simple boundedness theorem for a Lienard equation with damping. Ann Polon Math. 1990;51:183–188.
- Kolmanovskii V, Myshkis A. Introduction to the theory and applications of functional differential equations. Dordrecht: Kluwer Academic Publishers; 1999.
- Krasovskii NN. Stability of motion. Applications of Lyapunov���s second method to differential systems and equations with delay. Stanford (CA): Stanford University Press; 1963.
- Li HQ. Necessary and sufficient conditions for complete stability of the zero solution of the Lienard equation. Acta Math Sinica. 1988;31(2):209–214.
- Liu ZR. Conditions for the global stability of the Lienard equation. Acta Math Sinica. 1995;5:614–620.
- Liu B, Huang L. Boundedness of solutions for a class of retarded Liénard equation. J Math Anal Appl. 2003;286(2):422–434.
- Liu B, Huang L. Boundedness of solutions for a class of Lienard equations with a deviating argument. Appl Math Lett. 2008;21(2):109–112.
- Liu CJ, Xu SL. Boundedness of solutions of Lienard equations. J Qingdao Univ Nat Sci Ed. 1998;11(3):12–16.
- Long W, Zhang HX. Boundedness of solutions to a retarded Liénard equation. Electron J Qual Theory Differ Equ. 2010;24:1–9.
- Luk WS. Some results concerning the boundedness of solutions of Lienard equations with delay. SIAM J Appl Math. 1976;30(4):768–774.
- Malyseva IA. Boundedness of solutions of a Liénard differential equation. Differetial’niye Uravneniya. 1979;15(8):1420–1426.
- Muresan M. Boundedness of solutions for Lienard type equations. Mathematica. 1998;63(2):243–257.
- Napoles Valdes JE. Boundedness and global asymptotic stability of the forced Lienard equation. Rev Un Mat Argentina. 2000;41(4):47–59.
- Ogundare BS, Ademola AT, Ogundiran MO, et al. On the qualitative behaviour of solutions to certain second order nonlinear differential equation with delay. Ann Univ Ferrara Sez VII Sci Mat. 2017;63(2):333–351.
- Omeike MO, Adeyanju AA, Adams DO. Stability and boundedness of solutions of certain vector delay differential equations. J Nigerian Math Soc. 2018;37(2):77–87.
- Sugie J, Chen DL, Matsunaga H. On global asymptotic stability of systems of Liénard type. J Math Anal Appl. 1998;219(1):140–164.
- Tunç C. Some new stability and boundedness results of solutions of Liénard type equations with a deviating argument. Nonlinear Anal Hybrid Syst. 2010;4(1):85–91.
- Tunç C. A note on boundedness of solutions to a class of non-autonomous differential equations of second order. Appl Anal Discrete Math. 2010;4(2):361–372.
- Tunç C. New stability and boundedness results of Lienard type equations with multiple deviating arguments. Izv Nats Akad Nauk Armenii Mat. 2010;45(4):47–56.
- Tunç C. Boundedness results for solutions of certain nonlinear differential equations of second order. J Indones Math Soc. 2010;16(2):115–128.
- Tunç C. Stability and boundedness of solutions of non-autonomous differential equations of second order. J Comput Anal Appl. 2011;13(6):1067–1074.
- Tunç C. On the stability and boundedness of solutions of a class of Lienard equations with multiple deviating arguments. Vietnam J Math. 2011;39(2):177–190.
- Tunç C. Uniformly stability and boundedness of solutions of second order nonlinear delay differential equations. Appl Comput Math. 2011;10(3):449–462.
- Tunç C. Stability and uniform boundedness results for non-autonomous Lienard-type equations with a variable deviating argument. Acta Math Vietnam. 2012;37(3):311–325.
- Tunç C. Stability to vector Liénard equation with constant deviating argument. Nonlinear Dynam. 2013;73(3):1245–1251.
- Tunç C. Stability and boundedness in multi delay vector Liénard equation. Filomat. 2013;27(3):435–445.
- Tunç C. A note on the stability and boundedness of non-autonomous differential equations of second order with a variable deviating argument. Afr Mat. 2014;25(2):417–425.
- Tunç C. A note on the bounded solutions to x′′ + c (t, x, x′) + q (t) b (x) = f (t). Appl Math Inf Sci. 2014;8(1):393–399.
- Tunc C. Instability to vector Lienard equation with multiple delays. Cubo. 2015;17(1):1–9.
- Tunç C. Instability of solutions of vector Lienard equation with constant delay. Bull Math Soc Sci Math Roumanie (N.S.). 2016;59(2):197–204.
- Tunç C. On the qualitative behaviors of a functional differential equation of second order. Appl Appl Math. 2017;12(2):813–842.
- Tunç C. On the properties of solutions for a system of non-linear differential equations of second order. Int J Math Comput Sci. 2019;14(2):519–534.
- Tunç C, Tunç O. On behaviors of functional Volterra integro-differential equations with multiple time-lags. J Taibah Univ Sci. 2018;12(2):173–179.
- Tunç C, Ayhan T. On the asymptotic behavior of solutions to nonlinear differential equations of the second order. Comment Math. 2015;55(1):1–8.
- Tunc C, Dinç Y. Qualitative properties of certain non-linear differential systems of second order. J Taibah Univ Sci. 2017;11(2):359–366.
- Tunç C, Erdur S. New qualitative results for solutions of functional differential equations of second order. Discrete Dyn Nat Soc. 2018;2018; Art. ID 3151742:1–13.
- Tunç C, Tunç E. On the asymptotic behavior of solutions of certain second-order differential equations. J Franklin Inst. 2007;344(5):391–398.
- Tunç C, Yazgan R. Existence of periodic solutions to multidelay functional differential equations of second order. Abstr Appl Anal. 2013; Art. ID 968541:1–5.
- Yang QG. Boundedness and global asymptotic behavior of solutions to the Lienard equation. J Systems Sci Math Sci. 1999;19(2):211–216.
- Ye GR, Ding HS, Wu XL. Uniform boundedness of solutions for a class of Liénard equations. Electron J Differ Equ. 2009;97:1–5.
- Yoshizawa T. Stability theory by Liapunov’s second method. Publications of the Mathematical Society of Japan, no. 9. Tokyo: The Mathematical Society of Japan; 1966.
- Zhang B. On the retarded Lienard equation. Proc Amer Math Soc. 1992;115(3):779–785.
- Zhang B. Boundedness and stability of solutions of the retarded liénard equation with negative damping. Nonlinear Anal Theor. 1993;20(3):303–313.
- Zhang XS, Yan WP. Boundedness and asymptotic stability for a delay Lienard equation. Math Pract Theor. 2000;30(4):453–458.
- Zhou X, Jiang W. Stability and boundedness of retarded Lienard-type equation. Chinese Quart J Math. 2003;18(1):7–12.
- Zhou J, Liu ZR. The global asymptotic behavior of solutions for a non-autonomous generalized Lienard system. J Math Res Expo. 2001;21(3):410–414.
- Zhou J, Xiang L. On the stability and boundedness of solutions for the retarded Lienard-type equation. Ann Diff Equ. 1999;15(4):460–465.
- Wei J, Huang Q. Global existence of periodic solutions of Lienard equations with finite delay. Dynam Contin Discrete Impuls Syst. 1999;6(4):603–614.
- Wiandt T. On the boundedness of solutions of the vector Lienard equation. Dynam Syst Appl. 1998;7(1):141–143.