
 ?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.
?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.ABSTRACT
A novel Lyapunov-type inequality for Dirichlet problem associated with the quasilinear impulsive system involving the -Laplacian operator for j=1,2 is obtained. Then utility of this new inequality is exemplified in finding disconjugacy criterion, obtaining lower bounds for associated eigenvalue problems and investigating boundedness and asymptotic behaviour of oscillatory solutions. The effectiveness of the obtained disconjugacy criterion is illustrated via an example. Our results not only improve the recent related results but also generalize them to the impulsive case.
1. Introduction
In this paper, we obtain a Lyapunov type inequality for the following Dirichlet problem associated with the quasilinear impulsive system involving the -Laplacian operator for j=1,2
(1)
(1) Throughout this section, we assume that
is continuous on each interval
Definition 1.1
By a solution of system (Equation1
(1)
(1) ) on the interval
, we mean a nontrivial pair of continuous functions
defined on
such that
satisfying (Equation1
(1)
(1) ) for
.
Definition 1.2
[Citation24]
The solution of system (Equation1
(1)
(1) ) has a zero at the point c if both components of the solution w have a zero at this point.
We also need the following definitions.
Definition 1.3
[Citation24]
System (Equation1(1)
(1) ) is called disconjugate on an interval
if and only if there is no real nontrivial solution
of system (Equation1
(1)
(1) ) having two or more zeros on
.
Definition 1.4
[Citation24]
A nontrivial solution of system (Equation1
(1)
(1) ) is bounded on
if both components of w are bounded on
. If at least one component of w is not bounded on
, then this solution is called unbounded.
Definition 1.5
[Citation24]
A nontrivial solution of system (Equation1
(1)
(1) ) is said to be oscillatory if both components of w are oscillatory on
, i.e if for each
there is a point
such that
. If either at least one component of w is not oscillatory or they are oscillatory but they become zero at different points, this solution is called nonoscillatory.
Definition 1.6
[Citation24]
A nontrivial solution of system (Equation1
(1)
(1) ) tends to zero as
if both components of w tend to zero as
. If at least one component of w does not approach zero as
, then this solution does not approach zero as
.
Lyapunov type inequality is one of the main tools to investigate asymptotic behaviours, such as oscillation, disconjugacy, stability, of solutions of differential equations and to analyse boundary and eigenvalue problems. It was established by Lyapunov [Citation1] and generalized to linear impulsive case in [Citation2]. For a comprehensive exibition of the results, we refer two surveys [Citation3,Citation4] and references therein. The half linear version of Lyapunov inequality was obtained in [Citation5–9]. To the best of our knowledge, although many results have been obtained for quasilinear systems [Citation10–23], there is little known for the impulsive quasilinear systems [Citation24]. Although there is a large body of literature on quasilinear systems that we can not cover completely, the results in [Citation10,Citation11,Citation24] and in [Citation22] are worth mentioning due to their contribution to these subject.
Recall that the numbers are said to be conjugate if
In the sequel, we denote
and
Theorem 1.7
[Citation10]
In system (Equation1(1)
(1) ), let
and
and
be conjugate numbers for
and
, respectively. If system (Equation1
(1)
(1) ) has a real nontrivial solution
such that
with a<b are consecutive zeros, and u,v are not identically zero on
, then we have the following Lyapunov type inequality
Theorem 1.8
[Citation11]
In system (Equation1(1)
(1) ), let
and
and
be conjugate numbers for
and
, respectively. If system (Equation1
(1)
(1) ) has a real solution
such that
,
with a<b are consecutive zeros, and u,v are not identically zero on
then we have the following Lyapunov type inequality
Theorem 1.9
[Citation24]
In system (Equation1(1)
(1) ), let
and
and
be conjugate numbers for
and
, respectively and
be a nontrivial solution of the homogenous system
(2)
(2) where
for k=1, 2 and
. If the system (Equation1
(1)
(1) ) has a real nontrivial solution
such that
with a<b are consecutive zeros, and u,v are not identically zero on
, then we have the following Lyapunov type inequality
Theorem 1.10
[Citation22]
In system (Equation1(1)
(1) ), let
and
If the system (Equation1
(1)
(1) ) has a real nontrivial solution
such that
with a<b are consecutive zeros, and u,v are not identically zero on
then we have the following Lyapunov type inequality
Since our main interest is Lyapunov type inequality for system (Equation1(1)
(1) ), we assume the existence of nontrivial solution of this system. Our main purpose is to establish Lyapunov type inequality for the impulsive system of differential equations (Equation1
(1)
(1) ) satisfying Dirichlet boundary conditions. Although our motivation comes from the papers of [Citation11,Citation22,Citation24], our results not only extend the results of such papers to the impulsive case but also improve them.
1.1. Lyapunov type inequality
In the sequel, we assume that
(3)
(3) For the sake of convenience, we define the following integral operator
where
, k is a real-valued continuous function such that
for all
, and
are conjugate numbers.
Remark 1.1
For a given number μ and function k, set for
.
obtains its minimum at the point
such that
holds. Thus, we have
Remark 1.2
Since the function is convex for t>0, Jensen's inequality
with
and
implies
Similarly, we obtain
and
Now we are ready to give the main result of this paper as follows.
Theorem 1.11
Assume that the condition (Equation3(3)
(3) ) holds. Let
and
be conjugate numbers for
and
,
respectively and
be a nontrivial solution of the homogenous system
(4)
(4) where
for k=1, 2 and
. If the system (Equation1
(1)
(1) ) has a real nontrivial solution
such that
with a<b are consecutive zeros, then we have the following Lyapunov type inequality
(5)
(5)
Proof.
Multiplying the first equation of system (Equation1(1)
(1) ) by u and integrating from a to b and using
and
, we have
(6)
(6) Let
and
then from (Equation6
(6)
(6) ), we have
(7)
(7) Similarly from the second equation of system (Equation1
(1)
(1) ) and by using
and
, we get
On the other hand by employing Hölder inequality with indices
and
, one can obtain
or
(8)
(8) Similarly, by using Hölder inequality with indices
and
, one can obtain
(9)
(9) Adding (Equation8
(8)
(8) ) and (Equation9
(9)
(9) ) together yields
(10)
(10) Repeating the above procedure with
and
one can obtain the following inequality
(11)
(11) Moreover, the similar process implies the following inequalities
(12)
(12) and
(13)
(13) Adding (Equation10
(10)
(10) ) and (Equation12
(12)
(12) ), we have
By using (Equation7
(7)
(7) ), we get
where we have used
with
and
Hence we can conclude that
(14)
(14) The above process is applied to inequality (Equation11
(11)
(11) ) and inequality (Equation13
(13)
(13) ) to obtain the following inequality
(15)
(15) Raising inequalities (Equation14
(14)
(14) ) and (Equation15
(15)
(15) ) by
and
, respectively, then multiplying the resulting inequalities yield
(16)
(16) Now, we choose
and
such that
and
cancels out, i.e. they solve the homogeneous linear system (Equation4
(4)
(4) ). Based on the results obtained in Remark 1.1 and Remark 1.2 and inequality (Equation16
(16)
(16) ), the desired result can be obtained.
The following corollaries provide new Lyapunov type inequalities for the particular cases of system (Equation1(1)
(1) ). Since system (Equation4
(4)
(4) ) has infinitely many solutions
assuming different conditions on the relations between
and
yields more inequalities than we will show.
Corollary 1.12
Assume that the condition (Equation3(3)
(3) ) holds. Let
and
be conjugate numbers for
and
, respectively. Suppose that
(17)
(17) If system (Equation1
(1)
(1) ) has a real solution
such that
with a<b are consecutive zeros, then we have the following Lyapunov type inequality
Proof.
From the proof of Theorem 1.11, we see that condition (Equation17(17)
(17) ) implies that
is a nonzero solution of (Equation4
(4)
(4) ). Now, Corollary 1.12 is a direct consequence of Theorem 1.11.
Corollary 1.13
Assume that the condition (Equation3(3)
(3) ) holds. Let
and
be conjugate numbers for
and
respectively. Suppose that
(18)
(18) If system (Equation1
(1)
(1) ) has a real solution
such that
with a<b are consecutive zeros, then we have the following Lyapunov type inequality
Proof.
From the proof of Theorem 1.11, we see that condition (Equation18(18)
(18) ) implies that
is a nonzero solution of (Equation4
(4)
(4) ). Now, Corollary 1.13 is a direct consequence of Theorem 1.11.
Corollary 1.14
Assume that the condition (Equation3(3)
(3) ) holds. Let
and
be conjugate numbers for
and
respectively. Suppose that condition (Equation18
(18)
(18) ) holds. If system (Equation1
(1)
(1) ) has a real solution
such that
with a<b are consecutive zeros, then we have the following Lyapunov type inequality
Proof.
From the proof of Theorem 1.11, we see that condition (Equation18(18)
(18) ) implies that
is a nonzero solution of (Equation4
(4)
(4) ). Now, Corollary 1.14 is a direct consequence of Theorem 1.11.
Corollary 1.15
Assume that the condition (Equation3(3)
(3) ) holds. Let
and
be conjugate numbers for
and
, respectively,
and
and
be a nontrivial solution of the homogenous system
(19)
(19) where
for k=1,2 and
. If the system (Equation1
(1)
(1) ) has a real nontrivial solution
such that
with a<b are consecutive zeros, then we have the following Lyapunov type inequality
Remark 1.3
Since no sign condition is assumed for f and g, Theorem 1.11 is an impulsive generalization and improvement of [Citation22, Theorem 2.1]. Since system (Equation1(1)
(1) ) is more general than system (15) of [Citation11] and system (6.1) of [Citation24], Theorem 1.11 extends [Citation11, Corollary 2] and [Citation24, Theorem 6.1.1].
Remark 1.4
In the absence of impulse effect, Theorem 1.11 still improves [Citation22, Theorem 2.1], which implies that Theorem 1.11 is new even for the nonimpulsive case.
Remark 1.5
In view of and
we may replace the Lyapunov type inequality (Equation5
(5)
(5) ) by
2. Applications
In this section, we give some applications of Lyapunov type inequalities which are used as a handy tool in studying of the qualitative nature of solutions.
2.1. Disconjugacy
In this part by using Lyapunov type inequality (Equation5(5)
(5) ) obtained in Section 1.1, we establish a disconjugacy criterion for system (Equation1
(1)
(1) ).
Theorem 2.1
Assume that the condition (Equation3(3)
(3) ) holds. Let
and
be conjugate numbers for
and
,
respectively and
be a nontrivial solution of the homogenous system (Equation4
(4)
(4) ). If
(20)
(20) holds, then system (Equation1
(1)
(1) ) is disconjugate on
.
Proof.
Suppose on the contrary that there is a real solution with nontrivial
having two zeros
such that
for all
. Applying Theorem 1.11 we see that
Since
for
we obtain
Clearly, the last inequality contradicts (Equation20
(20)
(20) ). The proof is complete.
Remark 2.1
If we consider a particular case, where we obtain system (6.1) in [Citation24]. In this case, inequality (Equation5
(5)
(5) ) reduces to the following form
and disconjugacy criterion becomes exactly the same as in Theorem 6.3.1 of [Citation24]. This implies that Theorem 2.1 generalizes the previous disconjugacy criterion given in [Citation24].
Example 2.2
Let us consider system (Equation1(1)
(1) ) with
and
Then condition (Equation17
(17)
(17) ) is valid and
Moreover if we choose
and
then the assumptions (i) –(iv) are satisfied. In this case system (Equation1
(1)
(1) ) is reduced to the following second-order linear system of impulsive differential equations
(21)
(21) If we compute all the terms of inequality (Equation20
(20)
(20) ), then we will show that all the conditions of Theorem 2.1 are satisfied. Observe that
and
Therefore the left hand side of inequality (Equation20
(20)
(20) ) is
On the other hand
Therefore the right hand side of inequality (Equation20(20)
(20) ) is
Since all the conditions of Theorem 2.1 are satisfied, we can conclude that system (Equation1
(1)
(1) ) is disconjugate on
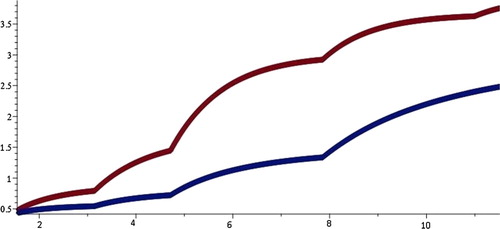
. This result can be visualized in Figure . If we impose the initial conditions
to the system (Equation21
(21)
(21) ), the numerical solution of system (Equation21
(21)
(21) ) can be shown as in Figure . In this figure, the red and blue curves represent the solutions u and v, respectively. These solutions have zeros only at
and they are different than zero when
Therefore, the solution
of system (Equation21
(21)
(21) ) can not be zero when
This implies that solution
of system (Equation21
(21)
(21) ) is disconjugate on
. Since the solution
is continuous at all points in
but its derivative has jumps at the jump points
the edges on the graph of solution
occur at the impulse points
2.2. Eigenvalue problems
Now, we present an application of the obtained Lyapunov-type inequality for system (Equation1(1)
(1) ). By using techniques similar to the technique in Napoli and Pinasco [Citation10], we establish the following result which gives lower bounds for eigenvalues of the associated eigenvalue problem of system (Equation1
(1)
(1) ). The proof of the following theorem is based on the Lyapunov type inequality derived in Theorem 1.11.
Figure 1. The graph of solutions and
of system (21).
Let ,
,
and
where
and
. Then system (Equation1
(1)
(1) ) reduces to the following impulsive eigenvalue problem
(22)
(22)
Definition 2.3
A pair is called an eigenvalue of (Equation22
(22)
(22) ) if there is a corresponding solution
such that
on
.
Theorem 2.4
Assume that the condition (Equation3(3)
(3) ) holds. Let
and
be conjugate numbers for
and
,
respectively and
be a nontrivial solution of the homogenous system (Equation4
(4)
(4) ) and
(23)
(23) Then there exists a function
such that
for every eigenvalue pair
of the system (Equation22
(22)
(22) ) where the constants C and D are given as
Proof.
Let be an eigenvalue pair and
be the corresponding eigenfunctions of the system (Equation22
(22)
(22) ). If we apply Lyapunov inequality obtained in Theorem 1.11 for system (Equation22
(22)
(22) ), we get
(24)
(24) For the eigenvalue μ, we can find the following lower bound as
Also by rearranging terms in (Equation24
(24)
(24) ), we obtain
Since the proofs of following corollaries are the same as that of Theorem 2.4, they are omitted.
Corollary 2.5
Assume that the condition (Equation3(3)
(3) ) holds. Let
and
be conjugate numbers for
and
, respectively. Suppose that (Equation17
(17)
(17) ) and (Equation23
(23)
(23) ) hold. Then there exists a function
such that
for every eigenvalue pair
of the system (Equation22
(22)
(22) ) where the constants
and
are given as
Corollary 2.6
Assume that the condition (Equation3(3)
(3) ) holds. Let
and
be conjugate numbers for
and
, respectively. Suppose that (Equation18
(18)
(18) ) and (Equation23
(23)
(23) ) hold. Then there exists a function
such that
for every eigenvalue pair
of the system (Equation22
(22)
(22) ) where the constants
and
are given as
Corollary 2.7
Assume that the condition (Equation3(3)
(3) ) holds. Let
and
be conjugate numbers for
and
, respectively,
and
and
be a nontrivial solution of the homogenous system (Equation19
(19)
(19) ). Suppose that (Equation23
(23)
(23) ) holds. Then there exists a function
such that
for every eigenvalue pair
of the system (Equation22
(22)
(22) ) where the constants
and
are given as
2.3. Asymptotic behaviour of oscillatory solutions
In this section as an application of Lyapunov type inequality given in Section 1.1, we establish the following results to study the asymptotic behaviour of the oscillatory solutions of system (Equation1(1)
(1) ).
Theorem 2.8
Assume that the condition (Equation3(3)
(3) ) holds. Let
and
be conjugate numbers for
and
,
respectively and
be a nontrivial solution of the homogenous system (Equation4
(4)
(4) ). Let
where
Then every oscillatory solution
of system (Equation1
(1)
(1) ) is bounded and approaches zero as
.
Proof.
First we prove the boundedness of oscillatory solution . Let us suppose that
is oscillatory but not bounded. Then
Then for every
, we can find
such that
for all t>T. Since w is oscillatory, there exists an interval
with
such that
. By using Lyapunov inequality for
, we get
Since
for
we obtain
or
where
Then we get
which implies contradiction. Therefore, w is bounded. Since w is bounded,
for t>T for any T. If
does not approach zero as
, then there exists a constant d>0 such that
Since w has arbitrarily large zeros, there exists an interval
with
, where T is sufficiently large, such that
. The remainder of the proof is similar to above, hence it is omitted.
The following corollaries and their proofs follow easily from Theorem 2.8 and its proof, respectively.
Corollary 2.9
Assume that the condition (Equation3(3)
(3) ) holds. Let
and
be conjugate numbers for
and
, respectively. Suppose that (Equation17
(17)
(17) ) holds. Let
where
Then every oscillatory solution
of system (Equation1
(1)
(1) ) is bounded and approaches zero as
.
Corollary 2.10
Assume that the condition (Equation3(3)
(3) ) holds. Let
and
be conjugate numbers for
and
respectively. Suppose that (Equation18
(18)
(18) ) holds. Let
where
Then every oscillatory solution
of system (Equation1
(1)
(1) ) is bounded and approaches zero as
.
Corollary 2.11
Assume that the condition (Equation3(3)
(3) ) holds. Let
and
be conjugate numbers for
and
, respectively,
and
and
be a nontrivial solution of the homogenous system. Suppose that (Equation19
(19)
(19) ) holds. Let
where
Then every oscillatory solution
of system (Equation1
(1)
(1) ) is bounded and approaches zero as
.
Disclosure statement
No potential conflict of interest was reported by the author.
ORCID
Zeynep Kayar http://orcid.org/0000-0002-8309-7930
References
- Liapounoff AM. Problème général de la stabilité du mouvement. Ann Fac Sci Toulouse Sci Math Sci Phys. 1907;2:203–474. Reprinted as Ann. Math. Studies, No, 17, Princeton, 1947..
- Guseinov GS, Zafer A. Stability criterion for second order linear impulsive differential equations with periodic coefficients. Math Nachr. 2008;281:1273–1282. doi: 10.1002/mana.200510677
- Cheng SS. Lyapunov inequalities for differential and difference equations. Fasc Math. 1992;23:25–41.
- Tiryaki A. Recent developments of Lyapunov-type inequalities. Adv Dyn Syst Appl. 2010;5:231–248.
- Pinasco JP. Lower bounds for eigenvalues of the one-dimensional p-Laplacian. Abstr Appl Anal. 2004;2:147–153. doi: 10.1155/S108533750431002X
- Lee CF, Yeh CC, Hong CH, et al. Lyapunov and Wirtinger inequalities. Appl Math Lett. 2004;17:847–853. doi: 10.1016/j.aml.2004.06.016
- Yang X. On inequalities of Lyapunov type. Appl Math Comput. 2003;134:293–300.
- Došlý O, Řehák P. Half-linear differential equations. Amsterdam: Elsevier Science B.V.; 2005. (North-Holland Mathematics Studies; Vol. 202).
- Wang X. Lyapunov type inequalities for second-order half-linear differential equations. J Math Anal Appl. 2011;382:792–801. doi: 10.1016/j.jmaa.2011.04.075
- De Nápoli PL, Pinasco JP. Estimates for eigenvalues of quasilinear elliptic systems. J Differ Equ. 2006;227:102–115. doi: 10.1016/j.jde.2006.01.004
- Çakmak D, Tiryaki A. On Lyapunov-type inequality for quasilinear systems. Appl Math Comput. 2010;216:3584–3591.
- Sim I, Lee YH. Lyapunov inequalities for one-dimensional p-Laplacian problems with a singular weight function. J Inequal Appl. 2010;2010:1–9. Article ID 865096. doi: 10.1155/2010/865096
- Çakmak D, Tiryaki A. Lyapunov-type inequality for a class of Dirichlet quasilinear systems involving the (p1,p2,…,pn)-Laplacian. J Math Anal Appl. 2010;369:76–81. doi: 10.1016/j.jmaa.2010.02.043
- Yang X, Kim YI, Lo K. Lyapunov-type inequality for a class of quasilinear systems. Math Comput Model. 2011;53:1162–1166. doi: 10.1016/j.mcm.2010.11.083
- Tang XH, He X. Lower bounds for generalized eigenvalues of the quasilinear systems. J Math Anal Appl. 2012;385:72–85. doi: 10.1016/j.jmaa.2011.06.026
- Aktas MF, Çakmak D, Tiryaki A. A note on Tang and He's paper. Appl Math Comput. 2012;218:4867–4871.
- Çakmak D, Aktas MF, Tiryaki A. Lyapunov type inequalities for nonlinear systems involving the (p1,p2,…,pn)-Laplacian. Electron J Differ Equ. 2013;2013:1–10. doi: 10.1186/1687-1847-2013-1
- Aktas MF. Lyapunov-type inequalities for n-dimensional quasilinear systems. Electron J Differ Equ. 2013;2013:1–8. doi: 10.1186/1687-1847-2013-1
- Yang X, Kim Y, Lo K. Lyapunov-type inequality for n-dimensional quasilinear systems. Math Inequal Appl. 2013;16:929–934.
- Tiryaki A, Çakmak D, Aktas MF. Lyapunov-type inequalities for a two classes of Diriclet quasilinear systems. Math Inequal Appl. 2014;17:843–863.
- Çakmak D. On Lyapunov-type inequality for a class of quasilinear systems. Electron J Qual Theory Differ Equ. 2014;2014:1–10. doi: 10.14232/ejqtde.2014.1.9
- Jleli M, Samet B. On Lyapunov-type inequalities for (p,q)-Laplacian systems. J Inequal Appl. 2017;2017:1–9. doi: 10.1186/s13660-017-1377-0
- Li QL, Cheung WS. Lyapunov-type inequalities for Laplacian systems and applications to boundary value problems. J Nonlinear Sci Appl. 2018;11:8–16. doi: 10.22436/jnsa.011.01.02
- Kayar Z. Lyapunov type inequalities and their applications for linear and nonlinear systems under impulse effect [PhD dissertation]. Ankara: Middle East Technical University; 2014.