
 ?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.
?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.Abstract
We explore the global dynamics of following three directional discrete-time exponential systems of difference equations:
where
,
and
are belonging to
. Precisely, we explore the boundedness and persistence of positive solution, existence of invariant rectangle, existence and uniqueness of positive equilibrium point, local and global dynamics about the unique positive equilibrium, and rate of convergence of these discrete-time exponential systems. Finally, theoretical results are verified numerically.
1. Introduction
Global dynamical properties of discrete-time exponential difference equations or systems of difference equations have widely investigated in the recent years. For instance, Ozturk et al. [Citation1] have explored the dynamical properties of following exponential difference equation:
(1)
(1)
where and
are belonging to
. Papaschinopoulos et al. [Citation2] have explored the dynamical properties of following discrete-time exponential systems:
(2)
(2)
where and
are belonging to
. Motivated from above studies, we explore the global dynamics of following two three-species discrete-time models which are extension of the work of [Citation1,Citation2]:
(3)
(3)
(4)
(4) where
,
and
are belonging to
. Discrete-time systems (3) and (4) viewed as models in mathematical biology where biological interpretation of parameters
,
are depicted in Table :
Table 1. Parameters of the discrete-time models (3) and (4) along their Biological interpretations.
Our main contribution in this paper is to explore the global dynamical properties for discrete-time systems (3) and (4). Global dynamics and rate of convergence of (3) are explored in Section 2. This includes the study of boundedness and persistence, existence of invariant rectangle, existence of the unique equilibrium, global dynamics, and Rate of convergence. Same analysis for system (4) is explored in Section 3. Theoretical results are verified numerically in Section 4. Conclusion is given in Section 5.
2. Dynamics of the system (3)
2.1. Boundedness and persistence
In the following theorem, we explore that every solution
of (3) is bounded and persists (see [Citation3,Citation4]).
Theorem 2.1:
The solution
of (3) is bounded and persists.
Proof:
If the solution of (3) is
then
(5)
(5) From (3) and (5), one gets
(6)
(6)
. Finally from (5) and (6), one gets
.
2.2. Existence of invariant rectangle
Theorem 2.2:
If is a
solution of (3) then its corresponding invariant rectangle is
where
Proof:
Follows by induction.
2.3. Existence of unique  equilibrium, global and local dynamics
equilibrium, global and local dynamics
Hereafter we will study existence of the equilibrium, global and local dynamics of (3). It is worthwhile to mentioned that in more general setting, system (3) can also be written as
(7)
(7)
Lemma 2.1:
Let and
be intervals of real numbers, s.t.,
(8)
(8) where
and
are continuous functions that satisfy the following conditions:
Let
If
Proof:
Set
(11)
(11) And for
, define
(12)
(12) Clearly
(13)
(13) Using the monotonicity of
and
one gets
(14)
(14) By induction, we obtain for
,
(15)
(15) Clearly
(16)
(16) which by the monotonicity of
and
Implies
(17)
(17) By induction it follows that
(18)
(18) Thus for every
, there exist numbers
,
,
(19)
(19) Clearly
(20)
(20) Using the continuity of
and
, equation (12) then implies that
(21)
(21) By assumption (b) one gets:
.
Hereafter based on Lemma 2.1, we will prove the following Theorem:
Theorem 2.3:
If
(22)
(22) then
is the unique
equilibrium of (3) and every
solution of (3) tends to
of (3) as
.
Proof:
From (3) one has
(23)
(23) It is clear that
and
satisfies the hypothesis of Lemma 2.1 and let
be positive numbers, s.t.,
(24)
(24) From (24) one gets
(25)
(25) which implies that
(26)
(26) Moreover one gets
(27)
(27) In view of (27), equation (26) then implies that
(28)
(28) From (28) one gets
(29)
(29) From (22) and (29) one gets
(30)
(30) Finally equation (30) then implies that
and
. Therefore from (5) and (6) and statement (b) of Lemma 2.1, (3) has a unique
equilibrium
and every
solution of (3) tends to
as
.
Hereafter global dynamics of (3) about is investigated.
Theorem 2.4:
Assume that (22) hold and if
(31)
(31) then
of (3) is globally asymptotically stable.
Proof:
Jacobian matrix about
is
(32)
(32) where
(33)
(33) Moreover Characteristic equation of
about
is given by
(34)
(34) where
(35)
(35) Now
(36)
(36) Assuming condition (31) holds then from (36) one get
and hence Theorem 1.5 of [Citation5] implies that
of (3) is locally asymptotically stable. Moreover by Theorem 2.3,
of (3) is globally asymptotically stable.
Hereafter Rate of convergence about of (3) is investigated motivated from the work of [Citation6].
2.4. Rate of convergence
Theorem 2.5:
If is a
solution of (3), s.t.,.
(37)
(37) where
(38)
(38) Then error vector
of every
solution of (3) satisfying
(39)
(39) where
are the Characteristic Root of
.
Proof:
If is a
solution of (3), s.t., (37) along with (38) hold. For error terms one has
(40)
(40) that is
(41)
(41) Set
(42)
(42) By (42), (41) gives
(43)
(43) where
(44)
(44) Taking the limits of
one gets
(45)
(45) that is
(46)
(46) where
as
. Now we have system (1.10) of [Citation7], where
(47)
(47) and
(48)
(48)
and ,
. Thus error terms about
similar to (32) is
(49)
(49)
3. Dynamics of the system (4)
3.1. Boundedness and persistence
Theorem 3.1:
The solution
of (4) is bounded and persists.
Proof:
If the solution of (4) is
then
(50)
(50) In addition from (4) and (50), one gets
(51)
(51)
. Finally from (50) and (51), one gets
3.2. Existence of invariant rectangle
Theorem 3.2:
If is a
solution of (4) then its corresponding invariant rectangle is
where
3.3. Existence of the unique equilibrium, global and local dynamics
We will study existence of the equilibrium, local and global dynamics of (4). It is also noted that in more general notation (4) can also be written as
(52)
(52)
Lemma 3.1:
Let and
be intervals of real numbers, s.t.,
(53)
(53) where
and
are differentiable functions that satisfy the following conditions:
Let
If
Proof:
Set
(56)
(56) And for
define
(57)
(57) Clearly
(58)
(58) Using the monotonicity of
and
one gets:
(59)
(59) By induction, we obtain for
(60)
(60) Moreover it is clear that
(61)
(61) Now monotonicity of
and
then implies that
(62)
(62) By induction it follows that
(63)
(63) Thus for every
there exist numbers
s.t.,
(64)
(64) Clearly,
(65)
(65) Using the continuity of
and
, equation (57) then implies that
(66)
(66) By assumption (b) one gets
(67)
(67)
Theorem 3.3:
If
(68)
(68) then
is the unique
equilibrium and
solution of (4) tends to
of (4) as
.
Proof:
From (4), we have
(69)
(69) It is clear that
and
satisfies the hypothesis of Lemma 3.1 and let
be positive numbers such that
(70)
(70) From (70) one gets
(71)
(71) which implies that
(72)
(72) Moreover
(73)
(73) In view of (73), equation (72) then implies that
(74)
(74) And so
(75)
(75) In addition from (68) and (75) one gets
(76)
(76) From which one can see that
and
. Therefore from (50) and (51) and statement (b) of Lemma 3.1, (4) has a unique
equilibrium point
and every
solution of (4) tends to
as
.
Theorem 3.4:
Assume that (68) hold and if
(77)
(77) then
of (4) is globally asymptotically stable.
Proof:
Jacobian matrix about
is
(78)
(78) where
(79)
(79) Moreover the Characteristic equation of
about
is
(80)
(80) where
(81)
(81) Now
(82)
(82) Assuming condition (77) holds then from (82) one get
and hence Theorem 1.5 of [Citation5] implies that
of (4) is locally asymptotically stable. Moreover by Theorem 3.3, one can see that
of (4) is globally asymptotically stable.
3.4. Rate of convergence
Theorem 3.5:
If is a
solution of (4) such that (37) along with following relation hold:
(83)
(83) Then
of every
solution of (4) satisfying
(84)
(84) where
are Characteristic root of
.
Proof:
If is a
solution of (4), s.t., (37) along with (83) hold. For error terms, one has
(85)
(85) that is
(86)
(86) Set
(87)
(87) By (87), (86) gives
(88)
(88) where
(89)
(89) Taking the limits of
and
one gets
(90)
(90) that is
(91)
(91) where
as
. Now we have system (1.10) of [Citation7], where
(92)
(92) and
(93)
(93) and
,
. Thus error terms about
similar to Linearized system of (4) is
(94)
(94)
4. Numerical simulations
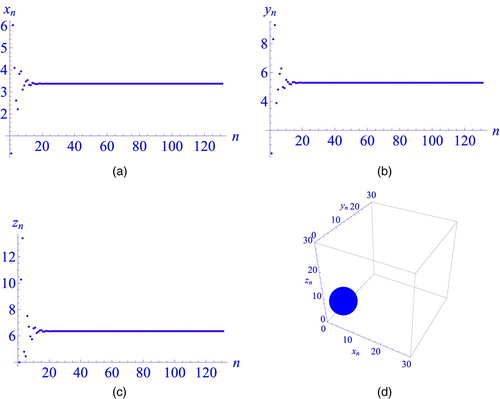
Here we will verify theoretical results obtain in Section 2–3 numerically. If then (3) with
can be written as
(95)
(95)
From computations it is easy to confirm that for above chosen values of parameters conditions under which
is globally asymptotically stable hold, i.e.
Moreover, plot of and its Global attractor is shown in Figure (a–d), respectively. Now if
then (3) with
can be written as
(96)
(96) Computations show that if
then conditions under which
is globally asymptotically stable hold, i.e.
Figure 1. Graph for (95).
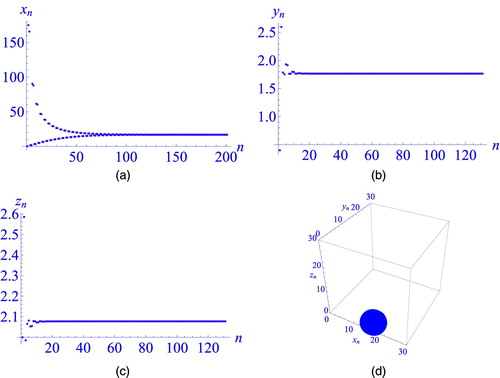
Moreover, plot of and Global attractor is shown in Figure (a–d), respectively. For system (4), if we choose
with
can be written as
(97)
(97) For these values
the conditions under which
is globally asymptotically stable satisfied, i.e.
and
Moreover, plot of
and its attractor is shown in Figure (a–d), respectively.
Figure 2. Graph for (96).
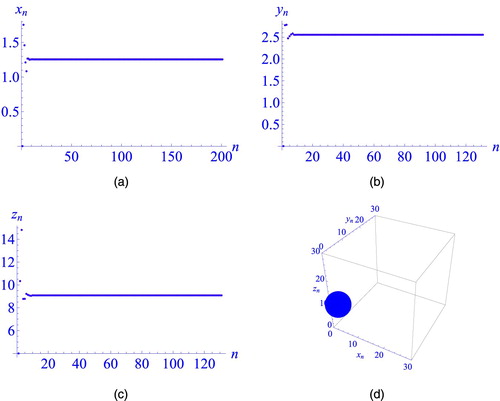
Figure 3. Graph for (97).
5. Conclusions
We have explored the global properties of exponential systems of difference equations. For both systems, we have studied the dynamics including boundedness and persistence, existence of invariant rectangle, existence of the unique equilibrium, global and local dynamics about the unique
equilibrium point and conclusion are presented in Tables . Furthermore rate of convergence for each system is also demonstrated. Finally, theoretical results are verified numerically.
Table 2. Existence of invariant rectangle corresponding to system (3) and (4).
Table 3. Existence of the uniqueness equilibrium of system (3) and (4).
Table 4. Existence of parametric conditions under which the equilibrium of system (3) and (4) is globally asymptotically stable.
Acknowledgement
The author declares that he got no funding on any part of this research.
Disclosure statement
No potential conflict of interest was reported by the author.
ORCID
A. Q. Khan http://orcid.org/0000-0002-0278-1352
References
- Ozturk I, Bozkurt F, Ozen S. On the difference equation: xn+1=(α1+α2e−xn)/α3+xn−1. Appl Math Comput. 2006;181:1387–1393.
- Papaschinopoulos G, Radin MA, Schinas CJ. Study of the asymptotic behavior of the solutions of three systems of difference equations of exponential form. Appl Math Comput. 2012;218:5310–5318.
- Grove EA, Ladas G. Periodicities in nonlinear difference equations. Boca Raton, FL: CRC Press; 2004.
- Kulenovic MRS, Ladas G. Dynamics of second-order rational difference equations. Boca Raton, FL: CRC Press; 2002.
- Sedaghat H. Nonlinear difference equations: theory with applications to social science models. Dordrecht: Kluwer Academic; 2003.
- Kalabusic S, Kulenovic MRS. Rate of convergence of solutions of rational difference equations of second-order. Adv Diff Eq. 2004;2:121–139.
- Pituk M. More on Poincare’s and Perron’s theorems for difference equations. J Diff Eq Appl. 2002;8:201–216.