
 ?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.
?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.Abstract
We present the existence of a finite search plan to find Brownian target on the d-space by using d-searchers. Each searcher moves continuously in both directions of the origin (starting point) of the line (field of its search) with random distances and velocities. We express theses distances and velocities with independent random variables with known probability density functions (PDFs). We present more analysis about the density of the random distances in our model by using Fourier–Laplace representation. This analysis will provide us with the conditions that make the expected value of the first meeting time between the target and one of the searchers finite.
1. Introduction
The searching techniques for a randomly moving target on the space has many applicabilitions in our life, for example, finding the charged particles in plasmas that move in the space with d-dimensional Brownian motion. In all searching techniques, the searchers move with known distances and velocities. If the search space is a line, then the searcher aims to detect the target in the right or left part of the starting point, where the searcher can change its direction without losing any time. Most of the techniques that have been studied for the line deal with deterministic distances and velocities, see [Citation1–7]. On the plane, Mohamed and El-Hadidy [Citation8, Citation9] and El-Hadidy [Citation10] presented more interesting search strategies with deterministic distance and regular fixed velocity to find the two-dimensional randomly moving targets. On the space, El-Hadidy and colleagues [Citation11–16] studied different techniques with deterministic distances and velocities by using multiple searchers. The main objective of these earlier works is to obtain the conditions that make the first meeting time between one of the searchers and the moving target finite. On the other hand, when the target is located, some earlier works discussed many different search strategies with deterministic distances and velocities to find this target in minimum time on the line, plane and space , such as [Citation17–25].
In this work, we need to find the condition that makes the expected value of the first meeting time between one of the d searchers and the d-dimensional Brownian target finite. We consider that the searchers have a nonstop random motion with random distances and velocities where there are no restrictions on the searcher's movement. We use the Fourier–Laplace transform to give an analytical expression for the random distance density functions that the searchers should do them with random velocities.
This paper is organized as follows. Section 1 gives an analytical expression for the density of random distances and velocities. In Section 2, we describe the searching problem based on this analytical expression. The condition that shows the existence of our search strategy is discussed in Section 3. Finally, the paper concludes with a discussion of the results.
2. Formulation of the model
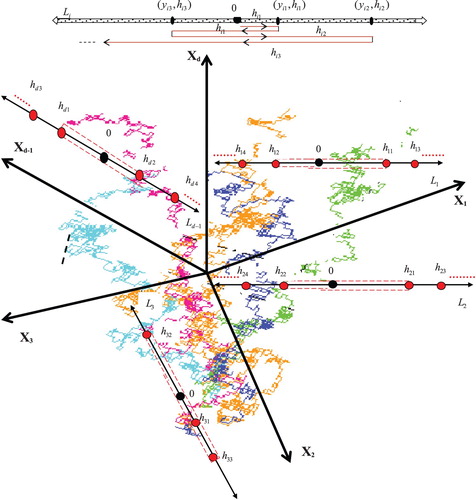
We consider that the searching process starts from the origin of the d-space by d-searchers. These searchers move continuously along d-line. Each searcher moves in both directions of its origin. On the line we consider the searcher
has the following strategy: start at
to cut a random distance
with a certain random velocity
on the left (right) part of
. After that, turn back to
and go a distance
to search the other right (left) part of
. Retrace the steps again to search the left (right) part of
as far as
and so on. Now, the searcher changes the direction and magnitude of its velocity (this velocity can have positive as well as negative values to include the direction of searcher motion) to another random point with random distance
and continues the search for another random distance. For our model, we assume
and
to be Probability Densities Functions (PDFs) of the basic and independent random distances and the velocities variables, respectively. Each one of these PDFs is normalized to one, where
and
(the velocity distribution is symmetric) for all
then there is no bias in the search model. In our model, we let the searcher
changes its direction on
at the random points
as in Figure . Let
be the PDFs for the initial distribution of the searchers at the random points
respectively, then we aim to determine the evolution of the density functions
of the locations for the searchers
respectively.
Figure 1. The search strategy for meeting a d-dimensional Brownian target.
At time t, let PDFs represent the changes of the searchers' velocities at the position
and refer to it as the frequency of velocity changes:
(1)
(1) After doing the random distance
at time t, each searcher
changes its velocity
at the point
, distance
and position
. In addition, we let
to be the probability density function of a certain velocity
. Thus, we can integrate the first term on the right-hand side of (Equation1
(1)
(1) ), over all these events. In the last term of (Equation1
(1)
(1) ),
, and the velocities are changed at
, then
will become an impulse function. By using the changes in the frequencies of the velocities, we can express
with the following:
(2)
(2) where
is the PDF of nonchange velocity until the distance
. As a result of velocities changes,
.
shows that
does not choose another velocity before passing the point
. Now, the motion of
on the line
with a given initial density and the two PDFs for the distances and velocities is described by Equations (Equation1
(1)
(1) ) and (Equation2
(2)
(2) ) which can be solved analytically. Hence, we aim to find the frequency of velocity changes
and then substitute with result (Equation2
(2)
(2) ).
According to the shift property of the Fourier transformation and by applying it with respect to the spatial coordinate in (Equation1(1)
(1) ), we get the factor
appears under the integral. If we integrate with respect to
then we get the Fourier transformation of
with a reciprocal velocity
. The Fourier transformation of (Equation1
(1)
(1) ) can be given by
(3)
(3) (see [Citation26]) where the indices k and
denote the Fourier components. Now, by applying the Laplace transformation with respect to t and by using convolution property, we get
(4)
(4) where
and
denotes the Laplace component. Thus, the frequency velocity changes in the Fourier–Laplace domain,
, is given by
(5)
(5) By the same method, the Fourier–Laplace transformation of the two equations (Equation2
(2)
(2) ) and (Equation5
(5)
(5) ) together gives:
(6)
(6) As in [Citation27], the Fourier–Laplace representation of the exponential functions is more suitable to get our analytical expression. Thus, by using the spatial coordinate in (Equation1
(1)
(1) ), our analytical expression for
densities
and
(nonnegative locally integrable functions on
) with random distances and velocities is sufficient to prove the existence of finiteness for these kinds of search strategies.
2.1. The searching problem
We consider a d-dimensional Brownian target that moves in with families of independent random variables
. These independent processes have a drift vector
and a covariance matrix Σ that is a diagonal matrix with only non-zero
. The initial position of the target has a known probability distribution.
Let be a combination of vectors of continuous functions, where
with random speed
, and it is given by
,
. These functions are considered as the search strategies of the d-searchers
where
(7)
(7) Let
be a random variable which represents the first meeting time between one of the searchers and the target. It is defined by
where
is a vector of random variables that is independent of
and represents the initial position of the target in
. For each searcher
we consider the set of all search strategies that satisfies (Equation7
(7)
(7) ) and with a speed (Equation5
(5)
(5) ) be
. We seek for the condition that gives finiteness of the expected value of
(i.e.
), where
(is the class of all of search strategies) and
.
3. Existence of finiteness
At time t on the line the searcher
will become at the random point
after cutting the distance
(see Figure ). Thus, we define the sequences:
and
such that
and (Equation11
(11)
(11) ) satisfied, where
is constant (
),
and
. By using (Equation6
(6)
(6) ), we can get the expected value of the random distance
as follows:
(8)
(8) By using (Equation5
(5)
(5) ), we obtain
(9)
(9) Consequently, from (Equation8
(8)
(8) ) and (Equation9
(9)
(9) ), the expected value of the searching time to search
is
(10)
(10) When
(11)
(11) for all
, we have
, where
is different from one searcher to another. There are very large numbers of events such that the first meeting between one of the searchers and the target may be done on the space. Now, we should turn into a new space called a probability space. Let the random variables that represent the target position are defined on a probability space
, where Ω is the set of all possible meeting points,
is the sigma algebra on these points and the location of the target at any time can be described by the probability measure γ. The following theorems contribute to the achievement of an existential search strategies. They help us to minimize
.
Theorem 3.1
Let be a combination of vectors of continuous functions, where
with random speed
. Then
is finite if
(12)
(12) is finite.
Proof.
For each line if we consider
,
and apply the same method in [Citation28], then we have
then
This gives
then
. By the same method and by using the notation
we obtain
.
Since the events
are mutually exclusive events, then
or
or ··· or
. Thus, for any
and
we get
also,
Therefore,
is given by
Since
are independent events, then we get
Assuming
leads to
Consequently, at any time t, if the searcher speed is finite and
then
is finite if
is finite.
Example 3.1
Let the target moves from a random point on the real line with a Brownian motion.
has an approximated value that depends on
. If we choose
and
then
and
. Also, we consider
have a standard normal distribution with mean 0 and variance
. Then, by using (Equation6
(6)
(6) ) the expected value of the random distances of the searcher (around the origin of
) with no changes of its velocity until the distance
are given from (Equation8
(8)
(8) ) by
and
respectively. Consequently, from (Equation5
(5)
(5) ) and (Equation10
(10)
(10) ) one can get the expected value of the searching times to search
by
respectively. One can get, the Fourier–Laplace representation of
and
by using the standard normal density function of
and
[Citation27] to get the values of
and
. Using these results in (Equation12
(12)
(12) ), we can get
when j = 1, 2 and d = 1.
To show the finiteness of our search model, we present the following theorem which gives the conditions that make (Equation12(12)
(12) ) finite.
Theorem 3.2
The search strategies of all searchers should satisfy:
(13)
(13) and
(14)
(14) where
are linear functions.
Proof.
At time t, when the position of the target ,
we have
but when
, we have
and
Thus,
At any
there exist
where
is the drift vector of
and
is vector of constants. One can get
where
. Therefore,
For each line
, we let
, where
is a sequence of independent and identically distributed random variables and
. In addition, if
,
and
then
is non-increasing with t, see [Citation4]. Consequently, let
then by putting
and
, we have
. Also, let
and
Then,
where
satisfy the renewal theorem conditions, see [Citation29]. This leads to the bounded of
for all
and
. Thus,
By similar way, we can prove that
4. Conclusion and future works
We use the Fourier–Laplace transform to give an analytical expression for the random distance density functions which the searchers should do them with random velocities to find a d-dimensional Brownian target. The initial target position is given by a vector of independent random variables . The search space is considered as a set of d non-intersected real lines in d-space. We showed the existence of a finite search strategy by doing some analytical expressions to use it in proving
, where
is the expected value of the first meeting time. Theorem 3.1 gives the condition which is sufficient to prove this existentialism. In addition, Theorem 3.2 provided more analysis to show that the
(which is a combination of vectors of continuous functions where
with random speed
is finite if conditions (Equation13
(13)
(13) ) and (Equation14
(14)
(14) ) are held.
In future work, we can extend this model as a generalized model with dependent random distance and velocities with d-searchers to find a combination of d-dimensional Brownian moving targets.
Disclosure statement
No potential conflict of interest was reported by the authors.
ORCID
Mohamed Abd Allah El-Hadidy http://orcid.org/0000-0002-9407-9586
Alaa Awad Alzulaibani http://orcid.org/0000-0003-3742-8003
References
- Fristedt B, Heath D. Searching for a particle on the real line. Adv Appl Prob. 1974;6(1):79–102. doi: 10.2307/1426208
- El-Hadidy M, Abou-Gabal H. Coordinated search for a random walk target motion. Fluct Noise Lett. 2018;17(1):1850002 (11 pages). doi: 10.1142/S0219477518500025
- El-Hadidy M, Abou-Gabal H. Searching for the random walking microorganism cells. Int J Biomath. 2019;12(6):1950064 (12 pages). doi: 10.1142/S1793524519500645
- El-Rayes A, Mohamed A, Abou Gabal H. Linear search for a Brownian target motion. Acta Math Sci J. 2003;23B(3):321–327. doi: 10.1016/S0252-9602(17)30338-7
- El-Hadidy M. Studying the finiteness of the first meeting time between Lévy flight jump and Brownian particles in the fluid reactive anomalous transport. Mod Phys Lett B. 2019;33(22):1950256 (8 pages). doi: 10.1142/S0217984919502567
- El-Hadidy M, Alzulaibani A. Cooperative search model for finding a Brownian target on the real line. J Taibah Univ Sci. 2019;13(1):177–183. doi: 10.1080/16583655.2018.1552493
- El-Hadidy M, Alzulaibani A. A mathematical model for preventing HIV virus from proliferating inside CD4 T Brownian cell using Gaussian jump nanorobot. Int J Biomath. 2019;12(7):1950076 (24 pages).
- Mohamed A, El-Hadidy M. Existence of a periodic search strategy for a parabolic spiral target motion in the plane. Afrika Mat J. 2013;24(2):145–160. doi: 10.1007/s13370-011-0049-3
- Mohamed A, El-Hadidy M. Coordinated search for a conditionally deterministic target motion in the plane. Eur J Math Sci. 2013;2(3):272–295.
- El-Hadidy MA. Existence of finite parbolic spiral search plan for a Brownian target. Int J Oper Res. 2018;31(3):368–383. doi: 10.1504/IJOR.2018.10010400
- Mohamed A, Kassem M, El-Hadidy M. Multiplicative linear search for a Brownian target motion. Appl Math Model. 2011;35(9):4127–4139. doi: 10.1016/j.apm.2011.03.024
- Mohamed A, El-Hadidy M. Optimal multiplicative generalized linear search plan for a discrete random walker. J Optim. 2013;2013:706176 ( 13 pages). DOI:10.1155/2013/706176
- El-Hadidy M. Optimal searching for a helix target motion. Sci China Math. 2015;58(4):749–762. doi: 10.1007/s11425-014-4864-5
- El-Hadidy M. Fuzzy optimal search plan for n-dimensional randomly moving target. Int J Comput Methods. 2016;13(6):1650038 (38 pages). doi: 10.1142/S0219876216500389
- El-Hadidy M. Study on the three players' linear rendezvous search problem. Int J Oper Res. 2018;33(3):297–314. doi: 10.1504/IJOR.2018.10016675
- El-Hadidy M. Generalised linear search plan for a d-dimensional random walk target. Int J Math Oper Res. 2019;15(2):211–241. doi: 10.1504/IJMOR.2019.10022970
- Reyniers D. Coordinated search for an object on the line. Eur J Oper Res. 1996;95(3):663–670. doi: 10.1016/S0377-2217(96)00314-1
- Balkhi Z. The generalized linear search problem, existence of optimal search paths. J Oper Res Soc Japan. 1987;30(4):399–420.
- Ohsumi A. Optimal search for a Markovian target. Nav Res Log. 1991;38(4):531–554. doi: 10.1002/1520-6750(199108)38:4<531::AID-NAV3220380407>3.0.CO;2-L
- Kassem M, El-Hadidy M. Optimal multiplicative Bayesian search for a lost target. Appl Math Comput. 2014;247:795–802.
- Mohamed A, Abou Gabal H, El-Hadidy M. Coordinated search for a randomly located target on the plane. Eur J Pure Appl Math. 2009;2(3):97–111.
- El-Hadidy M. Optimal spiral search plan for a randomly located target in the plane. Int J Oper Res. 2015;22(4):454–465. doi: 10.1504/IJOR.2015.068561
- El-Hadidy M, Abou-Gabal H. Optimal searching for a randomly located target in a bounded known region. Int J Comput Sci Math. 2015;6(4):392–403. doi: 10.1504/IJCSM.2015.071811
- El-Hadidy M. On maximum discounted effort reward search problem. Asia-Pac J Oper Res. 2016;33(3):1650019 (30 pages). doi: 10.1142/S0217595916500196
- Mohamed A, Abou-Gabal H, El-Hadidy M. Random search in a bounded area. Int J Math Oper Res. 2017;10(2):137–149. doi: 10.1504/IJMOR.2017.081921
- Gradshteyn I, Ryzhik I. Table of integrals, series, and products. 8th ed. Translated from the Russian by Scripta Technica, Inc. New York (NY): Academic Press; 2014.
- Musin I. On the Fourier-Laplace representation of analytic functions in tube domains. Collect Math. 1994;45(3):301–308.
- El-Hadidy M. Searching for a d-dimensional Brownian target with multiple sensors. Int J Math Oper Res. 2016;9(3):279–301. doi: 10.1504/IJMOR.2016.10000114
- Feller W. An introduction to probability theory and its applications. 2nd ed. New York (NY): Wiley; 1966.