?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.
Abstract
In this paper, we explore the boundedness and persistence of positive solution, existence as well as uniqueness of positive equilibrium point, existence of invariant rectangle, local and global dynamics, and rate of convergence of three-directional discrete-time exponential system. Finally, numerical simulations are given to verify not only obtained results but also to have the appearance of stable invariant close curves. The appearance of close curves grantee the fact that the system undergoes a supercritical hopf bifurcation.
Difference equations manifest themselves as mathematical models describing real-life situations in queuing problems, stochastic time series, statistical problems, number theory, geometry, combinatorial analysis, genetics in biology, quanta in radiation, economics, electrical networks, sociology, probability theory, psychology, etc. Generally, difference equations are considered as approximations of differential equations but fascinating on their own. Historically, difference equations were occurred before differential equations and have played a major role in the development of the later. During last few decades, theory of difference equations received attention for mathematicians and users of mathematics, and developed impressively because of its internal mathematical beauty and applicability in almost all branches of modern science. Examining the qualitative nature of such equations, especially an exponential difference equation, is very interesting and attracted many researchers in recent times. In this regard, El-Metwally et al. [Citation1] have explored global dynamics of the following exponential difference equation:
(1) (1) where and are +ve real numbers. Ozturk et al. [Citation2] have explored global dynamics of the following exponential difference equation:
(2) (2) where and are +ve real numbers. Papaschinopoulos et al. [Citation3] have explored global dynamics of the following systems of the exponential difference equation:
(3) (3) where and are +ve real numbers. Khan [Citation4] has explored global dynamics of the following systems of exponential difference equations:
(4) (4) where and are +ve real numbers. Bozkurt [Citation5] has explored the global dynamics of the following difference equation:
(5) (5) where and are +ve real numbers. Khan and Qureshi [Citation6] have explored the global dynamics of the following exponential system:
(6) (6) where and are +ve real numbers. Motivation from above existing studies, here our purpose is to explore the global dynamical properties of the following three-directional exponential system, that is, the extension of the work of Bozkurt [Citation5] and Khan and Qureshi [Citation6]:
(7) (7) where and are +ve real numbers.
The remaining paper is organized as follows: in Section 2, we investigate that every +ve solution of (Equation7(7) (7) ) is bounded and persists, whereas construction of invariant rectangle is explored in Section 3. In Section 4, we explore the existence as well as uniqueness of the +ve equilibrium point of (Equation7(7) (7) ). In Section 5, we explore the local dynamical properties about the unique +ve equilibrium point of (Equation7(7) (7) ). In Section 6, we investigate the global dynamics about the +ve equilibrium by a discrete-time Lyapunov function. We study the rate of convergence in Section 7, whereas numerical simulation is given in Section 8. A brief summary is given in the last section.
2. Boundedness and persistence
Theorem 2.1
Every positive solution of (Equation7(7) (7) ) is bounded and persists.
Proof.
If is a +ve solution of (Equation7(7) (7) ), then
(8) (8) From (Equation7(7) (7) ) and (Equation8(8) (8) ), one gets
(9) (9) From (Equation8(8) (8) ) and (Equation9(9) (9) ), we obtain
(10) (10)
3. Invariant rectangle for the system under consideration
Theorem 3.1
If the solution of (Equation7(7) (7) ) is , then its corresponding invariant rectangle is .
Proof.
If is the +ve solution with and , then from (Equation7(7) (7) ), one has
(11) (11) Hence, (Equation11(11) (11) ) then implies that and . Finally from (Equation7(7) (7) ), it is easy to establish that if .
4. Existence as well as uniqueness of the +ve fixed point
Theorem 4.1
System (Equation7(7) (7) ) has a unique fixed point: if
(12) (12) where Λ is defined in (Equation21(21) (21) ).
Proof.
From (Equation7(7) (7) ), one has
(13) (13) From (Equation13(13) (13) ), one obtains
(14) (14) From (Equation14(14) (14) ), set
(15) (15) Denote
(16) (16) where
(17) (17) and . Here, one need to prove if , then . From (Equation16(16) (16) ) and (Equation17(17) (17) ), one obtains
(18) (18) where
(19) (19) Using (Equation17(17) (17) ) and (Equation19(19) (19) ) in (Equation18(18) (18) ), we obtain
(20) (20) where
(21) (21) Now assuming that if (Equation12(12) (12) ) and (Equation21(21) (21) ) hold from (Equation20(20) (20) ), we obtain .
5. Local dynamics about the unique +ve equilibrium point
Theorem 5.1
For equilibrium Υ of (Equation7(7) (7) ), the following holds:
Υ is a sink if
(22) (22)
Υ is a source if
(23) (23)
Proof.
If Υ is an equilibrium point of (Equation7(7) (7) ), then
(24) (24) Moreover, we have the following map for constructing the corresponding linearized form of (Equation7(7) (7) ):
(25) (25) with
(26) (26) The about Υ subject to map (Equation25(25) (25) ) is
(27) (27) where
(28) (28) The auxiliary equation of about Υ is
(29) (29) where
(30) (30)
Assuming that (Equation22(22) (22) ) holds, then from (31), one obtains: . Hence, Υ of (Equation7(7) (7) ) is locally asymptotically stable.
By similar manipulation as for the proof of , we obtain
(32) (32) Assuming that (Equation23(23) (23) ) holds, then from (Equation32(32) (32) ), one obtains: . Hence, Υ of (Equation7(7) (7) ) is a source.
6. Global dynamics of (7) about the +ve equilibrium point
Hereafter, global dynamical properties of (Equation7(7) (7) ) are explored about Υ by constructing a discrete-time Lyapunov function motivated from the exiting work [Citation5].
Theorem 6.1
Equilibrium Υ of (Equation7(7) (7) ) is globally asymptotically stable if
(33) (33)
Proof.
Consider the following discrete-time Lyapunov function:
(34) (34) Now,
(35) (35) From (Equation33(33) (33) ) and (Equation35(35) (35) ), one obtains: for all . Hence, we obtain that , and thus Υ of (Equation7(7) (7) ) is globally asymptotically stable.
7. Rate of convergence
We will explore the convergence result about Υ motivated from the work of Garić-Demirović and Kulenović [Citation7] in this section.
Theorem 7.1
If the solution of (Equation7(7) (7) ) is , ,
(36) (36) with
(37) (37) then error vector, i.e. satisfies
(38) (38) where are root of .
Proof.
If the +ve solution of (Equation7(7) (7) ) is , s.t., (Equation36(36) (36) ) along (Equation37(37) (37) ) hold, then
(39) (39) Denote
(40) (40) From (Equation40(40) (40) ), (Equation39(39) (39) ) becomes
(41) (41) where
(42) (42) From (Equation42(42) (42) ), one obtains:
(43) (43) that is
(44) (44) where as . Now, we have system 1.10 of Ref. [Citation8], where and
(45) (45) where . Therefore, about Υ, the limiting system becomes
(46) (46) which is as about Υ.
8. Numerical simulations
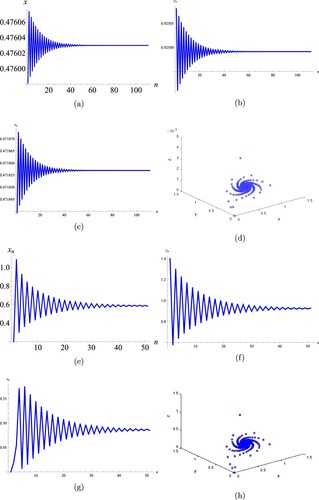
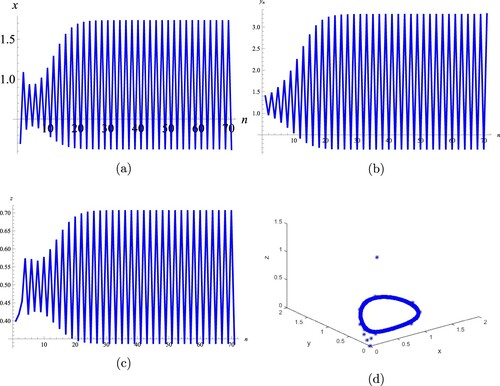
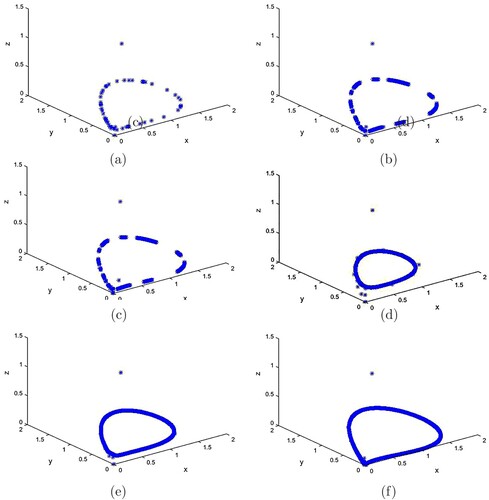
In this section, we will present simulation to verify not only obtained results but also exhibits that (Equation7(7) (7) ) undergoes a supercritical hopf bifurcation. For instance, if are 13, 0.24, 8, 12, 0.1, 5, 5,0.14, 4, then condition (Equation22(22) (22) ) holds, i.e.
which clearly indicate the fact that the unique positive equilibrium point of (Equation7(7) (7) ) is locally stable (see Figure (a–c)). Moreover, for said values, condition (Equation33(33) (33) ) also hold, i.e. , which indicates that positive equilibrium point is globally stable (see Figure (d)), and hence, these computations agree with theoretical results. Similarly, for choosing parameters as , then from Figure (e–g), the unique +ve equilibrium point of (Equation7(7) (7) ) is stable and its corresponding attractor is shown in Figure (h). But if are 18, 0.24, 8, 20, 0.1, 5, 5,0.4, 4, then from Figure (a–c), the unique positive equilibrium point of (Equation7(7) (7) ) is unstable and in the meantime stable closed curve appeared which is depicted in Figure (d). The appearance of the stable closed curve implies that (Equation7(7) (7) ) undergoes a supercritical hopf bifurcation. More bifurcation diagrams subject to and are plotted in Figure .
Figure 1. Trajectories for (Equation7(7) (7) ) with are 1.7, 0.2, 0.9, 1.4, 0.9, 0.24.
Figure 2. Trajectories for (Equation7(7) (7) ) with are 0.07, 0.2, 1.9, 1.4, 0.9, 0.4.
The presented work is about the dynamical properties of the three-directional system of difference equations, that is the extension of the work studied by Bozkurt [Citation5] and Khan and Qureshi [Citation6]. We have proved that the +ve solution of (Equation7(7) (7) ) is bounded and persists, i.e. , , , and the set where
is invariant rectangle. Furthermore, we have proved that (Equation7(7) (7) ) has a unique +ve equilibrium point: Υ if
where Λ is defined in (Equation21(21) (21) ). By linear stability, we have explored the local dynamics about Υ and proved that it is sink (respectively unstable) if (Equation22(22) (22) ) (respectively (Equation23(23) (23) )) holds. By constructing the discrete-time discrete-time Lyapunov function, we explored that Υ of (Equation7(7) (7) ) is globally asymptotically stable if , and hold. We have also explored the rate of convergence that converges to unique +ve equilibrium Υ. Finally, simulations are presented to verify obtained results. These simulations not only verify our obtained results but also proved that (Equation7(7) (7) ) undergoes a supercritical hopf bifurcation.
Acknowledgments
This work was supported by the Higher Education Commission of Pakistan.
Disclosure statement
No potential conflict of interest was reported by the authors.
Additional information
Funding
.
References
El-Metwally E, Grove EA, Ladas G, et al. On the difference equation xn+1=α1+α2xn−1e−xn. Nonlinear Anal. 2001;47:4623–4634. doi: 10.1016/S0362-546X(01)00575-2
Papaschinopoulos G, Radin M, Schinas CJ. Study of the asymptotic behavior of the solutions of three systems of difference equations of exponential form. Appl Math Comput. 2012;218:5310–5318.
Garić-Demirović M, Kulenović MRS. Dynamics of an anti-competitive two dimensional rational system of difference equations. Sarajevo J Math. 2014;7(19):39–56.

 ?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.
?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.(22)
 Assuming that (Equation22
Assuming that (Equation22