
 ?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.
?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.Abstract
The studies in operator theory are attracting many researchers. The central aim of this investigation is to formulate a special parametric differential operator (PDO) based on the error function in the open unit disk. The suggested operator is related to the well-known Carlson–Shaffer operator and the differential operator due to Salagean. We express a class of analytic functions to study its performance in view of the geometric function theory. As application, we employ PDO to present the conformable d'Alembert's equation. We discuss the univalent solution of the suggested equation and study some of its geometric behaviours.
1. Introduction
A class of parametric differential operators (PDO) is a special class of parametric equations. Parametric equations are generally utilized to define the coordinates of the points that make up a geometric shape such as a curve or surface, in which situation the formulas are cooperatively known as a parametric representation or parameterization of the image. The PDOs are normally employed in kinematics, where the arc of a graph is characterized by equations depending on time as the parameter. Nevertheless, parameters can characterize other physical magnitudes (such as geometric variables as in our study) or can be picked randomly for convenience. Parameterizations are non-unique; additional set of parametric equations can require the same graph.
The complex differential equation has attracted many researchers taking the general form
where
is an analytic function in a complex domain with non zero coefficients. Classes of this formula are investigated widely. Most of these studies are focused on the connection problem and its boundary. For example, Pommerenke investigated [Citation1] the second order; Heittokangas [Citation2] studied a special case of the kth order, while Walter [Citation3] presented a meromorphic solution for a class of complex differential equation. Later, the equation is generalized by using fractional calculus in the open unit disk [Citation4–6].
The theory of differential and integral operators is a study of the various classes of operators over function spaces. The operators can have structures which are formulated abstractly by their characteristics. During the times, this theory becomes very interesting in applications not only in mathematics, but in other subjects especially physics. Nowadays, the fractional, fractal and conformable operators play a major role developing applications in engineering, medical studies including the dynamic of recent pandemic, economic and computer sciences. More applications of this theory is appeared, when some classes of differential and integral operators are extended to the complex plane [Citation7–9].
One of the most important recent operators in the complex plane is the conformable differential operator [Citation10] and generalized by a fractional differential operator in [Citation11]. The basic idea of the parametric differential operator (PDO) came from the controller system, which is employed by Anderson and Ulness [Citation12] to define the well-known PDO for a real variable. The main aim of this study is to suggest a special PDO based on the error function in the open unit disk then use it to generalize the D'Alembert's equation. To study the analytic univalent solution of the generalized equation, we formulate a class of analytic functions, investigating its behaviour in view of the geometric function theory.
2. Methodology
This section displays the method and concepts that we will employ in our study.
2.1. Error function
The error function singed by the three letters erf, is an odd complex function of a complex variable formulating by the integral
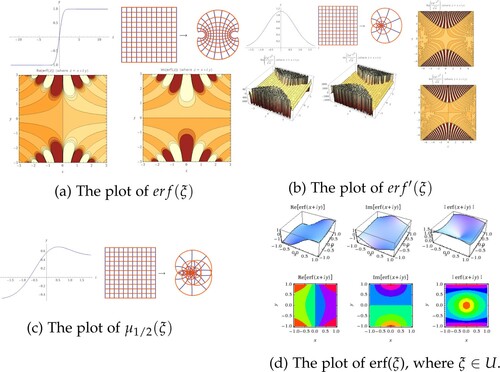
where the integral is a special sigmoid function (see Figure ) having the series
where
indicates the confluent hypergeometric function. The k th derivatives of
are given by the formula
where H indicates the Hermite polynomials. In the open unit disk
the error function satisfies
where
where
Figure 1. Three graphs of error function including PDO of order .
2.2. Parametric differential operator (PDO)
Anderson and Ulness [Citation12] formulated a new conformable differential operator based on the control theory. The proportional-derivative controller for controller output μ at time τ with two tuning parameters has the structure
(1)
(1)
where
indicates the proportional gain,
presents the derivative gain, and erf is the error between the state variable and the process variable (see [Citation13]).
For a fractional value , (Equation1
(1)
(1) ) can be considered for a complex variable
as follows:
(2)
(2)
,
and
Note that
where
is called the complex controller output. This type of controller has been suggested for the first time in 2007 by Tomasz et al. [Citation14]. Later it has been used in many applications in engineering and physics, especially in the thermal dynamics for boiling, cooling and optical studies (see [Citation15–17]).
2.3. Normalized class of analytic functions
To study the operator geometrically in U, we need to consider the class of normalized analytic functions denoting by Λ and structuring by the formula
(3)
(3)
It is clear that
Two functions
and
are convoluted if and only if they satisfy the structure [Citation18]
Based on the above information, we formulate a new linear operator
as follows
where
and
The class of linear operators in U is investigated, for the first time, by Carlson and Shaffer [Citation19] (recent advance work can be located in [Citation20, Citation21]) when they introduced the convoluted linear operator
where β indicates the incomplete beta function. Since
and
then we have the relation
As a conclusion,
admits a linear combination of special types of the Carlson–Shaffer operator in U. Proceeding, we introduce the following generalized parametric differential operator
(4)
(4)
Note that, the special case
represents the Salagean differential operator [Citation22], when
.Next subsection is deal with the generalized D'Alembert's equation using (Equation4
(4)
(4) ). In this place, we refer to different types of the D'Alembert's equation, which can be located in [Citation23–30].
2.4. D'Alembert's equation
In this part, we shall generalize D'Alembert's equation [Citation31]
This type of differential equations has applications in the wave theory. For example,
has a solution
Assuming
we have
Employing the operator (Equation4
(4)
(4) ), then the conformable D'Alembert's equation can be viewed as follows:
(5)
(5)
We deal with the following class of the conformable d'Alembert's Equation
Definition 2.1
Consider the normalized functions Then the function ϕ is in the class
if it satisfies the Ma-Minda type [Citation32] of subordination inequality
where ≺ indicates the subordination notion [Citation33].
Our aim is to collect all the inequalities that bring the above subordination using a class of Equation (Equation5(5)
(5) ). In other words, we shall present the suitable value of a that satisfies the above subordination providing
. Moreover, we shall study the following class
where
is the class of convex univalent functions in U.
2.5. Lemmas
To illustrate our result, we need the following lemma ([Citation33], pp. 139–140).
Lemma 2.2
Let Then
when
and the solution is sharp.
Lemma 2.3
[Citation33]
Assume that υ is univalent in U and V is analytic in a domain contains If
is starlike then
and υ is the best dominant.
3. Results
We start our first result:
Theorem 3.1
Let If one of the following inequalities holds
then .
Proof.
Consider By letting
in Lemma 2.2 such that
and
we have from the condition inequalities
which leads to
The next result indicates that every univalent solution of D'Alembert's equation is the best dominant for all other solutions.
Theorem 3.2
Let (the class of convex univalent analytic functions in U). Assume that
is a univalent solution in U of the conformable D'Alembert's equation
If ϕ and
then
Proof.
Suppose that
Clearly,
and since
then
Moreover, we have
and
Thus, in view of [Citation33] , Theorem 3.4.c,
such that
is the best dominant of the last subordination.
We proceed to present more information about solutions of Bernoulli's equation. Next two results indicate that a solution of Bernoulli's equation can be considered as a solution of the Briot–Bouquet equation. More interesting outcome is that the equation has a positive real solution and univalent.
Theorem 3.3
Let g be analytic and λ be analytic starlike function in U. Assume that is a solution of Bernoulli's equation
where
Then ϕ is a solution of the Briot–Bouquet equation
such that
Moreover, if (starlike of order α) then
and
Proof.
Since λ is starlike analytic function in U then
Define a function
as follows:
Thus,
According to [Citation33] , Theorem 3.4j, the Briot–Bouquet equation
such that
Since then in view of [Citation18], Corollary 2.2, there is a probability measure
such that
That is,
satisfies the majority inequality
But,
is starlike in U, then in virtue of [Citation34], Corollary 2, we have
which leads to
The last part comes immediately from [Citation34], Theorem 3.
Corollary 3.4
Consider d'Alembert's equation
(6)
(6)
Then the solution is defined by the hypergeometric function as follows:
where c is a real constant,
and
.
Theorem 3.5
Let where
is convex univalent function in U. Then
where
is analytic in U, with
and
. In addition, for
,
fulfills the relation
Proof.
By the definition of we obtain
which satisfies that there is an analytic function with
and
confirming
Proceeding, we get
Integrating yields
Accordingly, we attain
(7)
(7)
In virtue of the subordination, we have
Note that
transforms the disk
onto a convex symmetric domain with x-axis, which yields
Thus, we have the conclusion
and
Equation (Equation7
(7)
(7) ) implies that
This leads to
Thus, we obtain
Corollary 3.6
Let . Then
where
is the extreme starlike function in U.
Proof.
Clearly, the function is convex univalent in U (see [Citation33]). Therefore, by letting
in Theorem 3.5, we have
consequently, we obtain
Corollary 3.7
Let . Then
where γ is Euler constant,
and
are the hyperbolic cosine and sine integrals, respectively
and
Proof.
Clearly, the function is convex univalent in U (see [Citation33]). Thus, by putting
in Theorem 3.5, we obtain
consequently, we obtain
Corollary 3.8
Let . Then
where
is the extreme convex function in U.
Proof.
From Corollary 3.7, we obtain
The majority of the coefficients implies that
which indicates that
Corollary 3.9
Let . Then
where
is the extreme convex function in U.
Proof.
Let A computation shows that
This condition is sufficient to prove that
is convex in U provided
Then, by assuming
then in view of Theorem 3.5, we have
Since
which is majorized by the convex function
then we have
and consequently, we attain
Finally, we have the following result
Theorem 3.10
Let Then the subordination
implies
where the function
indicates the Limacon domain.
Proof.
In view of [Citation35] , Lemma 2, the function is starlike in U. But
Thus, by consuming
and
in Lemma 2.3, then we have the desire assertion.
Example 3.11
Let
Let
Let
Let
Figure 2 shows the behaviour of solutions of Equation (Equation6(6)
(6) ) for different values of α. In view of Theorem 3.1, we selected the maximum value of at
We confirm that the solution
(the class of normalized analytic univalent functions). Note that the functional
is starlike function in U (see [Citation33], Corollary 4.5.f.1) under the conditions
and
Figure 2. The behaviour of solutions of the conformable d'Alembert's Equation (Equation6
(6)
(6) ).
![Figure 2. The behaviour of solutions ϕ(ξ) of the conformable d'Alembert's Equation (Equation6(6) Θ[ϕ(ξ)]=ξ(1−ξ)2−2α,|ξ|∈(0.21,0.3).(6) ).](/cms/asset/c467abea-fa67-4c0e-9d83-5eefa2ee44a9/tusc_a_1987006_f0002_oc.jpg)
For example, when we have the solution
which is starlike in U.
4. Conclusion
The above study showed that a linear combination of special types of the Carlson–Shaffer linear operator can be suggested to define a new parametric fractional operator. Some of its geometric presentations are discussed. Moreover, we formulated a class of analytic functions involving the operator in terms of D'Alembert's equation. The sharp solutions is investigated using the subordination results. For future works, one can develop the PDO using quantum calculus.
Acknowledgments
The authors would like to express their full thanks to the respected reviewers for the deep comments, which improved our paper.
Disclosure statement
No potential conflict of interest was reported by the author(s).
References
- Pommerenke Ch. On the mean growth of the solutions of complex linear differential equations in the disk. Complex Variables Elliptic Equ. 1982;1(1):23–38.
- Heittokangas J. On complex differential equations in the unit disc. Helsinki, Finland: Suomalainen Tiedeakatemia; 2000.
- Bergweiler W. On a theorem of gol'dberg concerning meromorphic solutions of algebraic differential equations. Complex Variables Theory Appl: An Int J. 1998;37(1-4):93–96.
- Ibrahim RW. Ulam stability for fractional differential equation in complex domain. Abstr Appl Anal. 2012;2012:1–9. Hindawi.
- Ibrahim RW, Jahangiri JM. Boundary fractional differential equation in a complex domain. Boundary Value Probl. 2014;2014(1):1–11.
- Ibrahim RW, Ulam-Hyers stability for cauchy fractional differential equation in the unit disk. Abstr Appl Anal. 2012;2012:1–11. Hindawi.
- Ibrahim RW, Baleanu D. On quantum hybrid fractional conformable differential and integral operators in a complex domain. Revista De La Real Academia De Ciencias Exactas Fisicas Y Naturales Serie A Matematicas. 2021;115(1):1–13.
- Ibrahim RW. Geometric process solving a class of analytic functions using q-convolution differential operator. J Taibah Univ Sci. 2020;14(1):670–677.
- Yasar E. On convolutions of slanted half-plane mappings. J Taibah Univ Sci. 2021;15(1):71–76.
- Ibrahim RW, Jahangiri JM. Conformable differential operator generalizes the Briot-Bouquet differential equation in a complex domain. AIMS Math. 2019;4(6):1582–1595.
- Ibrahim RW, Baleanu D. On a combination of fractional differential and integral operators associated with a class of normalized functions. AIMS Math. 2021;6(4):4211–4226.
- Anderson DR, Ulness DJ. Newly defined conformable derivatives. Adv Dyn Syst Appl. 2015;10(2):109–137.
- Li Y, Ang KH, Chong GCY. PID control system analysis and design. IEEE Control Syst Mag. 2006;26(1):32–41.
- Czarski T, Pozniak KT, Romaniuk RS, et al. Multi-cavity complex controller with vector simulator for TESLA technology linear accelerator. In: Photonics Applications in Astronomy, Communications, Industry, and High-Energy Physics Experiments 2007. Vol. 6937. Wilga, Poland: International Society for Optics and Photonics; 2007. p. 69370G.
- Shi J, Shen J, Qu B, et al. High-performance complex controller for high-power converters with low pulse ratios. In: 2015 9th International Conference on Power Electronics and ECCE Asia (ICPE-ECCE Asia). Białystok, Poland: IEEE; 2015. p. 2180–2187.
- Xie K, Hu G, Yi H, et al. A novel digital control method of a single-phase grid-connected inverter based on a virtual closed-loop circuit and complex vector representation. Energies. 2017;10(12):2068.
- Zheng X, Sun S, Liu X, et al. Complex current controller design based on multiple equations construction of Three-Phase inverter. J Electr Eng Technol. 2021;2017:1–11.
- Ruscheweyh S. Convolutions in geometric function theory. Les Presses De L'Universite De Montreal, Montreal. 1981;16(2021):2245–2255.
- Carlson BC, Shaffer DB. Starlike and prestarlike hypergeometric functions. SIAM J Math Anal. 1984;15(4):737–745.
- Ibrahim R, Sokol J. Linear operator associated with the generalized fractional differential operator. Miskolc Math Notes. 2016;17(1):339–355.
- Ibrahim RW, Sokol J. On a new class of analytic function derived by a fractional differential operator. Acta Mathematica Scientia. 2014;34(5):1417–1426.
- Salagean GS. Subclasses of univalent functions. In: Complex Analysis-Fifth Romanian-Finnish Seminar. Berlin, Heidelberg: Springer; 1983. p. 362–372.
- Ozkan YS, Yasar E, Seadawy AR. A third-order nonlinear Schrodinger equation: the exact solutions, group-invariant solutions and conservation laws. J Taibah Univ Sci. 2020;14(1):585–597.
- Ozkan YS, Yasar E, Seadawy AR. On the multi-waves, interaction and peregrine-like rational solutions of perturbed Radhakrishnan-Kundu-Lakshmanan equation. PhysicaScripta. 2020;95(8):085205.
- Younas U, Seadawy AR, Younis M, et al. Dispersive of propagation wave structures to the Dullin-Gottwald-Holm dynamical equation in a shallow water waves. Chinese J Phys. 2020;68:348–364.
- Seadawy AR, Arshad M, Lu D. Modulation stability analysis and solitary wave solutions of nonlinear higher-order SchrOdinger dynamical equation with second-order spatiotemporal dispersion. Indian J Phys. 2019;93(8):1041–1049.
- Ali A, Seadawy AR, Lu D. New solitary wave solutions of some nonlinear models and their applications. Adv Differ Equ. 2018;93(1):1–12.
- Ismael HF, Seadawy A, Bulut H. Rational solutions, and the interaction solutions to the (2+1)-dimensional time-dependent Date-Jimbo-Kashiwara-Miwa equation. Int J Computer Math. 2021;2018:1–9.
- Seadawy AR, Kumar D, Hosseini K, et al. The system of equations for the ion sound and langmuir waves and its new exact solutions. Results Phys. 2018;9:1631–1634.
- Cheemaa N, Seadawy AR, Chen S. More general families of exact solitary wave solutions of the nonlinear Schrodinger equation with their applications in nonlinear optics. European Phys J Plus. 2018;133(12):1–9.
- Zwillinger D. Handbook of differential equations. 3rd ed., Boston, MA: Academic; 1997.
- Ma W, Minda D. A unified treatment of some special classes of univalent functions. In: Li Z, Ren F, Yang L, et al., editors. Proceeding of the Conference on Complex Analysis. Boston: Int. Press; 1994. p. 157–169.
- Miller SS, Mocanu PT. Differential subordinations: theory and applications. Tianjin, China: CRC Press; 2000.
- Campbell DM. Majorization-subordination theorems for locally univalent functions, II. Can J Math. 1973;25(2):420–425.
- Masih VS, Kanas S. Subclasses of starlike and convex functions associated with the limacon domain. Symmetry. 2020;12(6):942.