

ABSTRACT
This paper proposes a numerical control (NC) machining simulation system with adaptive look-ahead interpolator and on-line collision detection function. Adaptive collision detection between tool and machine can be executed synchronously to avoid interference during the machining process. Traditional multi-axis machines are used to process free-form surfaces. However, determining how to check whether or not the machining path is correct remains a challenge. In path planning, determining how to avoid the wrong path resulting in the waste of materials and machine damage has become an important issue in the industry. Currently, most of planning use pre- processing simulation prior to actual machining aims to eliminate the wrong path that may result in collision. In this study, the efficiency of a developed multi-axis collision detection system is based on the computational complexity of possible collision parts. Hence, during simulation, the number of collision detections is variable and depends on the time interval of each path; this ensures that the most sophisticated collision detection can be done in limited processing time. The NC simulation structure with adaptive look-ahead interpolator and on-line collision detection proposed in this study can be applied to all kinds of processing machines. Through the results of this study, the value of the controller can be greatly enhanced to achieve the purposes of real-time motion planning and adaptive collision detection.
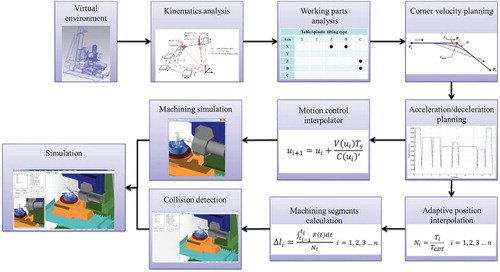
GRAPHICAL ABSTRACT
ORCID
Hong-Tzong Yau http://orcid.org/0000-0001-8823-8520
Chia-Hao Chang http://orcid.org/0000-0002-1434-1063
Tsan-Jui Yang http://orcid.org/0000-0002-9326-929X
Jiun-Ting Lin http://orcid.org/0000-0002-0872-8923