
 ?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.
?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.ABSTRACT
In this paper, we deal with the problem of estimating the local strain tensor from a sequence of micro-structural images realized during deformation tests of engineering materials. Since the strain tensor is defined via the Jacobian of the displacement field, we propose to compute the displacement field by a variational model which takes care of properties of the Jacobian of the displacement. In particular, we are interested in areas of high strain. The data term of our variational model relies on the brightness invariance property of the image sequence. As prior we choose the second order total generalized variation of the displacement field. This splits the Jacobian into a smooth and a non-smooth part. The latter reflects the material cracks. An additional constraint is incorporated to handle physical properties of the non-smooth part for tensile tests. We prove that the resulting convex model has a minimizer and show how a primal-dual method can be applied to find a minimizer. The corresponding algorithm has the advantage that the strain tensor is directly computed within the iteration process. It is further equipped with a coarse-to-fine strategy to cope with larger displacements. Numerical examples with simulated and experimental data demonstrate the very good performance of our algorithm. In comparison to state-of-the-art engineering software, our method can resolve local phenomena much better.
1. Introduction
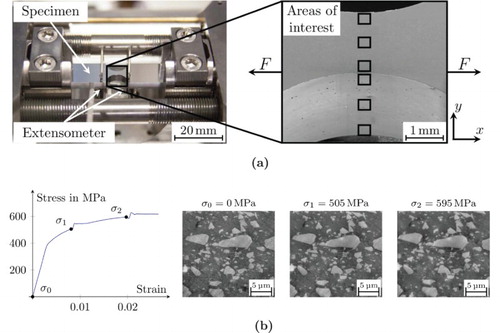
The (Cauchy) strain tensor plays a fundamental role in mechanical engineering for deriving local mechanical properties of materials. In this paper, we are interested in estimating the strain tensor from a sequence of microstructural images of a certain material acquired during in situ deformation tests. An experimental setup of a tensile test is shown in Figure .
Figure 1. Illustration of an in situ tensile test. (a) Experimental setup for the tensile test inside a scanning electron microscope. Left: Test material within the microscope. Right: Part of the material with the regions of interest, where a sequence of images (micrographs) is taken for increasing load and (b) Stress–strain curve with three selected micrographs taken under increasing load. The stress is defined as the applied force F divided by the initial cross section of the specimen
. The (global) strain is defined as the relative elongation of the specimen measured by the extensometer.
Let be the displacement field that describes how each point moves from one image to another. For deformations of a continuum body, the strain tensor ϵ is defined via the Jacobian of the displacement field u by
(1)
(1)
State-of-the-art software packages for strain analysis like Veddac [Citation1], VIC [Citation2], NCorr [Citation3], and [Citation4–6] apply correlation-based methods to estimate the displacement field and use the result to compute the strain tensor. Roughly speaking, correlation- based methods compare certain windows around each pixel in a predefined search window. Due to the extent of the window around the pixels and since the displacement is often only computed on a coarser grid to reduce the computational effort, the local resolution of these methods is limited. This is especially a drawback when we are interested in the local strain behaviour and the appearance of microstructural damage.
In this paper, we propose to use a variational model to compute the displacement field u from a sequence of images f. Variational models are composed of a data term , which incorporates the information given by the image sequence, and a prior
, which has to be chosen in such a way that its minimizer reflects known or desirable properties of the displacement field:
In image processing, the apparent displacement u between image frames is known as optical flow. Variational methods for optical flow estimation go back to Horn and Schunck [Citation7], and there is a vast number of refinements and extensions of their approach. We refer to [Citation8] for a comprehensive overview. In particular, optical flow models with priors containing higher order derivatives of the flow were successfully used, e.g. in [Citation9–17].
Although it seems natural to apply ideas from variational optical flow models also for strain analysis, such methods have rarely been addressed in the literature. The papers [Citation9,Citation11] aim at computing derivatives simultaneously to the optical flow field but are not related to engineering applications. The computation of the (Lagrangian) strain tensor by a variational method was addressed in [Citation18]. There, the authors proposed a smooth fourth order optical flow model which directly computes the strain tensor from an image sequence obtained in a biaxial tensile test with an elastomer. In contrast to our work, they were interested in the macro-scale behaviour and compute the minimizer of their smooth energy function by solving the corresponding Euler-Lagrange equations.
We propose a data term based on the brightness invariance assumption of the image sequence, which is usual in optical flow estimation. The more interesting part is the choice of the prior, where we have in mind that we are interested in local variations of the Jacobian of the displacement field, i.e. of the strain. In the conference paper [Citation19], we built up on the assumption that the displacement field u is additively composed of a non-smooth part v and a smooth part w. Then, we penalized the Jacobian of v and the second order derivative of w by an infimal convolution prior. The infimal convolution (IC) of the first and the second order derivatives was introduced in imaging by Chambolle and Lions [Citation20]. For a recent generalization called ICTV, we refer to [Citation10]. In this paper, we will see that it is better for our task to split the Jacobian of u instead of u itself. To this end, we apply the second order total generalized variation (TGV) of the displacement field as prior. For tensile tests, a physical prior on the non-smooth part of the strain is added. The TGV of functions was introduced by Bredies et al. [Citation21] for image restoration tasks and has meanwhile found many applications. For a discrete variant, see also [Citation22,Citation23]. In particular, TGV regularization was successfully used in connection with optical flow in [Citation15–17]. We mention that there is a software package corresponding to [Citation16] available since 2015. Our first code in [Citation19] was written before any public software package with TGV or infimal convolution prior was available. Our applications show the potential of the method in an impressive way.
The resulting variational model is convex and a minimizer can be computed with primal–dual methods, which are meanwhile standard in image processing. The corresponding algorithm computes the strain tensor directly within the iteration process. This is an advantage compared to standard engineering software, which estimates the displacement field by correlation-based methods first and then computes its Jacobian. Our algorithm is further equipped with a coarse-to-fine strategy to cope with larger displacements as proposed, e.g. in [Citation24–27].
We demonstrate by artificial and real-world examples that the proposed model leads to very good results, which cannot be obtain by state-of-the-art software packages. With our extensive numerical results, we aim at convincing engineers of the advantages of the proposed method.
2. Model
We start with the continuous model and turn to the discrete model for digital images afterwards. The reason is that the discrete notation appears more clumsy and it is easier to get the clue from the continuous notation.
2.1. Continuous model
Suppose that we are given grey-valued images
We are interested in the flow field
, which describes how
transforms into
. Here, we focus on the brightness invariance assumption, which reads with
as
(2)
(2) A first order Taylor expansion around an initial optical flow field
gives
(3)
(3) Plugging (Equation3
(3)
(3) ) into (Equation2
(2)
(2) ), we obtain
Later, we apply a coarse-to-fine scheme [Citation24,Citation25] and use the result from one scale as an initialization for the next one. Applying a non-negative increasing function
results in the data term
(4)
(4) For the task at hand, we need a prior which recognizes local changes in the displacement field. Therefore, it seems to be useful to consider the smooth global and non-smooth local behaviour of the displacement field. For
we denote by
the square root of the sum of the squared components of z, i.e. its Frobenius norm.
Let us first consider the following Banach spaces of scalar functions :
functions of bounded variation
with norm
functions of bounded Hessian
of functions of total generalized variation of order two
In our task we deal with vector fields and define
,
and
componentwise.
In the previous paper [Citation19], we assumed that u=v+w can be decomposed additively into a (componentwise) non-smooth part and a smooth part
and suggested under the above smoothness assumptions the prior
(5)
(5) which is the infimal convolution of
and
.
In this paper, we decompose instead of u and use the TGV of the displacement field u as a prior, which reads under the corresponding smoothness assumptions as
(6)
(6) Of course, if a is a conservative vector field, i.e. the Jacobian of some function w, then
and
coincide. However, the latter is in general not the case. In our applications, cracks are reflected by the non-smooth part
of
. Here, it is important to notice the following difference: the IC prior (Equation5
(5)
(5) ) enforces sparsity of the Jacobian
of the non-smooth part v of u; while the TGV prior enforces sparsity of the non-smooth part
of the Jacobian
of u.
2.2. Discrete model
In practice, we are concerned with images defined on a two-dimensional rectangular grid
. Besides this notion, we use the alternative representation of an image f as a vector of length
. In the task at hand, we are given micrographs
and
, e.g. from a tensile test, corresponding to different loads as depicted in Figure . Considering only grid points
and assuming for a moment that also the partial derivatives of
are given, the data term in (Equation4
(4)
(4) ) becomes
(7)
(7) This term is only well defined if
. Here, we use bilinear interpolation to compute the required values of
between grid points. If points lie outside the grid, we assume mirror extension of the image at the boundary. By
we denote the forward differences in x-direction with Neumann boundary conditions defined as
Again, we use the notation
both for the function and the vectorized version. Furthermore, we denote also the corresponding difference matrix by
. The differences in y-direction can be defined analogously. We replace the partial derivatives of
in (Equation7
(7)
(7) ) by the forward differences
and apply once more bilinear interpolation to compute values between grid points which results in the data term
For our task, we use the function
because it is well-known that the
-norm reduces the influence of outliers. Then the data term can be rewritten in the convenient matrix–vector notation
(8)
(8) where
For the discrete versions of the TGV prior, we also need the backward differences in x-direction, i.e.
and analogously for the y-direction. We set
and use the tensor products
Denoting by
the mixed norm defined for
as
the discrete counterpart of the TGV prior in (Equation6
(6)
(6) ) reads
In summary, our model is given by
(9)
(9) From a physical point of view, it makes sense to incorporate additional constraints on the displacement field or the strain. In the TGV model, we split the strain into parts representing the global and local features. With this interpretation, it is a reasonable assumption that for tensile tests the strain corresponding to local phenomena is positive in the direction of the applied force. This is motivated by the fact that cracks can only open or widen during a tensile test. Mathematically, if a force is applied in x-direction, we make the restriction
so that the model becomes
(10)
(10)
Remark 1
Let us emphasize that strain in materials science is only defined for continuous deformation. In this sense, it is not defined for cracks. In accordance with the definition (Equation1(1)
(1) ) in the continuous setting, we refer to its discrete counterpart
as the strain. Nevertheless, we will see later that strain in the classical sense is sometimes better resembled by the smooth part a.
By the next proposition, the functions (Equation9(9)
(9) ), resp. (Equation10
(10)
(10) ) possess minimizers under a mild assumption which was in particular fulfilled for all our practical examples.
Proposition 2
Let . Then there exist minimizers of (Equation9
(9)
(9) ) and (Equation10
(10)
(10) ).
Proof.
It is sufficient to show that the continuous, convex function E in (Equation9(9)
(9) ) is coercive, which implies the assertion for (Equation9
(9)
(9) ). Regarding (Equation10
(10)
(10) ), the assertion follows immediately since the function remains coercive after adding the constraint.
Assume in contrast that E is not coercive. Then, for some , there exists a sequence
with
and
. We split
with
and
, where
denotes the orthogonal complement of
.
Suppose that as
. Then we have
where
. Let
, where
and
. Then
and since
is injective on
we have that
as
. Now
is injective on
such that
as
. Let
be a minimizer of
, where
and
. Then, by the equivalence of norms,
can only be bounded as
if
is bounded, which is only possible if
. But then we get
as
. Thus, we obtain the contradiction
Assume that as
. Then there exists a subsequence
with
for some
and it follows
Since by assumption
is injective on
, the right-hand side goes to
as
, which is a contradiction.
3. Algorithm
In this section, we use the primal–dual hybrid gradient method with modified dual variable (PDHGMp) [Citation29,Citation30] to compute a minimizer of (Equation9(9)
(9) ). The minimization of (Equation10
(10)
(10) ) follows similarly.
We rewrite the minimization problem as
(11)
(11) The basic PDHGMp algorithm for this problem is given in Algorithm 1. For the special form, we refer to [Citation31, Alg. 8].
We have to comment on the proximal steps within the algorithm. The update for a is straightforward. Regarding s,t, observe that the problems can be separated into N subproblems, e.g. for s they have the form
where
,
. The solution of these problems is given by a grouped or coupled shrinkage, see the appendix. If we extend the model by the positivity constraint, i.e. (Equation10
(10)
(10) ), the update step for s becomes a bit more involved since we need to compute N problems of the form
with x as above. For
, the term
can be neglected and we end up with the usual coupled shrinkage. For
, we have
and for the remaining three components the usual coupled shrinkage can be applied.
Due to the diagonal structure of A and B, the proximal step to get u can be separated into N subproblems of the form
(12)
(12) where
. The solution is a generalized soft shrinkage of x explained in the appendix.
Remark 3
Computation of the strain ϵ within the primal–dual algorithm
The primal–dual method uses the Lagrangian of (Equation11(11)
(11) ), which contains the summand
, with the dual variable b. Hence, the algorithm computes the desired strain tensor directly within the iteration process and no subsequent computation of the derivative of the optical flow is required.
We updated the basic PDHGMp algorithm by a coarse-to-fine scheme as proposed, e.g. in [Citation24–27] to cope with large displacements. Moreover, we applied the common trick median filtering on every scale to improve the results, see also [Citation26,Citation27]. For more information and the pseudo code for the coarse-to-fine scheme we refer to [Citation32]. To ensure convergence of the algorithm, we use 3000 iterations of the PDHGMp algorithm in each level of the coarse-to-fine scheme. The high number of iterations leads to a computation time of about 20 min which is not competitive to state-of-the-art optical flow methods. We want to emphasize that there is still some potential to optimize the computation time but for our applications this was not necessary since the computation time is negligible in comparison to the time demand of the experiments.
4. Numerical examples
In this section, we present and analyse numerical results of our approaches.
First, we consider artificial data to demonstrate the behaviour of different optical flow models and to underline why the TGV regularized model appears to be appropriate for the described practical tasks. Then, we deal with displacements in aluminium matrix composites (AMC) during tensile tests, where we focus on the detection of local damage and crack propagation. Finally, we demonstrate the flexibility of our method by showing results for different experimental settings and materials.
The algorithm is implemented in C++. Unless stated otherwise, we set
(13)
(13) for all real-world examples. The positivity constraint (Equation10
(10)
(10) ) on the strain is used for the real-world examples of tensile tests with AMCs. For the artificial examples and the compression and fatigue tests, we do not involve the constraints.
The data in Figure was provided by K. Lichtenberg from the ‘Institute for Applied Materials (IAM)’ at the Karlsruhe Institute of Technology (KIT).
4.1. Artificial examples
To explain the differences between various regularization terms, we use the following simple example: a segment of pixels of one exemplary micrograph of an aluminium composite is taken and the simulated displacement field in Figure consisting of the sum of a piecewise constant and a linear part is applied to warp this image. Then, the warped and the initial image are used as the input to reconstruct the simulated displacement field and its strain tensor via variational models with the same data term (Equation8
(8)
(8) ) and the following priors: besides the TGV prior, we used the
Figure 2. Original displacement in pixels, additively composed of a piecewise constant and a linear part and
.

The minimizers of the various models and the strain component
are shown in Figure (a,b), respectively. The parameters stated in the caption are optimized with respect to the best visual impression. The models with
and
priors cannot find a sharp displacement field boundary, while the
model introduces additional boundaries due to the so-called staircasing effect. The
regularized model is better, but it is clearly worse than the IC and TGV methods. Clearly, for this example both methods IC and TGV give good results since
is indeed additively composed of a non-smooth and a smooth component. The next example does not have this property.
Figure 3. Results for the simulated example from Figure for various regularization terms. Parameters: for (
),
for (TV),
for (
),
,
for (
),
,
,
for (
) and
,
for (TGV). (a) Displacement
in pixels using various regularization terms and (b) Derivative
using various regularization terms.
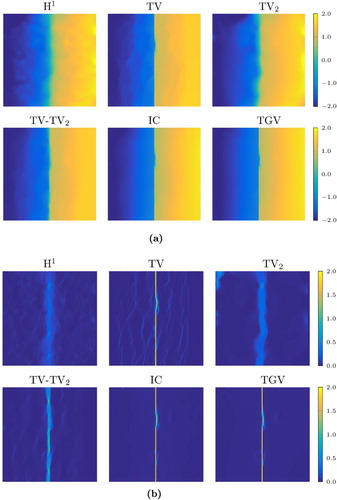
Our next artificial example in Figure shows a displacement field consisting of two parts. The lower part contains a jump whereas we have a purely linear transition in the upper part. In terms of a tensile test, this might be seen as a crack in the lower part and a purely elastic deformation in the upper part of the image. As the displacement field is a transition between the non-smooth upper part and the smooth lower one, it can not be split additively in an appropriate way, whereas it is actually possible to split the strain. Therefore, the TGV model clearly outperforms the IC model. The parameters for the TGV model are those in (Equation13(13)
(13) ). Compared to the TGV model, we chose smaller parameters for the IC model, namely
,
,
, since otherwise the resulting displacement was too smooth. We also added the result of the large displacement optical flow (LDOF) model by Brox and Malik [Citation35] using their implementation with standard parameters. However, it is clearly visible that the result contains too much structures in the smooth upper part and at the same time is not able to reconstruct the jump in the lower part.
Figure 4. Results for a simulated example with a linear transition of the displacement field in the upper half and a jump in the lower half of the image. (a) Displacement in pixels using IC, TGV regularization, and the method in [Citation35] and (b) Derivative
using IC, TGV regularization, and the method in [Citation35].
![Figure 4. Results for a simulated example with a linear transition of the displacement field in the upper half and a jump in the lower half of the image. (a) Displacement u1 in pixels using IC, TGV regularization, and the method in [Citation35] and (b) Derivative ∇xu1 using IC, TGV regularization, and the method in [Citation35].](/cms/asset/4d4cffc8-8bb1-4d38-9369-2dff5eec5fac/gipe_a_1475479_f0004_c.jpg)
4.2. Tensile tests with AMC
Next, we deal with tensile tests of aluminium matrix composites (AMC). An AMC material is highly suitable for lightweight applications in aerospace, defense and automotive industry. Compared to monolithic materials, composite materials have advantageous properties such as higher ultimate tensile strength or a higher stiffness to density ratio. Here, we mainly focus on calculating local strains of silicon carbide particle reinforced AMCs from a sequence of scanning electron microscope (SEM) images acquired during tensile tests, where the specimen is pulled in x-direction and elongates with increasing force. Figure illustrates the experimental setup and the resulting image sequence schematically. We are interested in the local deformation behaviour of the composite material on a microscale. Therefore, it is necessary to perform SEM monitored tensile tests to study deformation and crack initiation due to the inhomogeneous microstructure. We will especially focus on , which describes the change in displacement
for the x-direction. A positive value indicates tension and a negative one compression.
Unless stated otherwise, we use the image under no or low load as the reference image and compute the displacement between the reference image and images under higher load. Hence, the displacement and strain are given in the coordinates of the reference image and we overlay the results with the reference image.
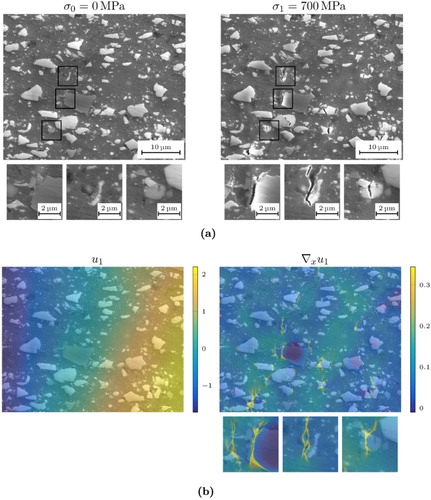
The real-world example in Figure illustrates again the difference between the TGV and IC regularized models. In this example, the material has a few cracks in its initial state and they widen up, but the surrounding aluminium matrix deforms smoothly. Whereas the computed displacement looks roughly the same for both methods, the differences are visible in its derivative
. The TGV model only shows some structure where the cracks actually are, but the IC model leads to structures that pass through the whole image since it is, in analogy to the previous artificial example, impossible to split the displacement into two parts for this example. The TGV model outperforms the IC model in this setting. Nevertheless, for the cracks themselves, both methods lead to equally good results as the lower half of the enlarged region in Figure shows. In summary, both methods show the main structures, but the IC model introduces wrong structures. Therefore, we focus on the TGV model in the rest of our examples.
Figure 5. Comparison of IC and TGV models for a real-world example where the cracks widen up but the surrounding aluminium matrix deforms smoothly. (a) Microstructure images of the specimen under low and high load and (b) Results of the TGV and IC models showing the displacement in
(
) and the strain
.
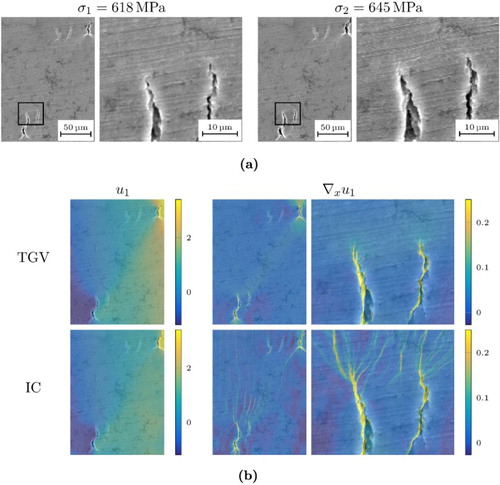
In our next example, we are interested in the detection of different kind of cracks. Figure shows other real-world data arising from a tensile test. Cracks correspond to peaks in . In the enlarged regions, three different types of cracks are shown, namely
a crack due to decohesion of a particle from the surrounding matrix,
a crack in the aluminium matrix, and
a crack inside a particle.
Figure 6. Detection of different kind of cracks by the TGV model. (a) Microstructure images of the specimen under low and high load and (b) Results of the TGV model showing the displacement in
(
) and the strain
.
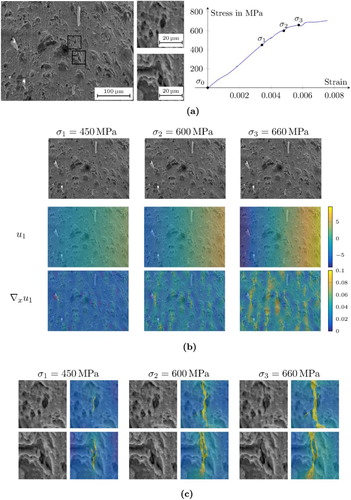
Next, we are interested in crack propagation. Figure shows the displacement and the strain
for certain regions under different load. It is remarkable that even under low load, when the cracks are not or hardly visible in the images, the strain in the corresponding regions is large. Thus, it is a sensitive and useful tool to study crack initiation mechanisms.
Figure 7. Results on crack propagation by the TGV model. (a) Microstructure images without load () and stress–strain curve, (b) Displacement
in
(
) and the strain
. The colourbar for the strain is cut off at 0.1 to make smaller values under low load visible, and (c) Two enlarged regions and the strain
for increasing loads. The colour map for the strain is cut off at 0.1 to make smaller values under low load visible.
4.3. Comparison to correlation-based methods
Now, we draw our attention to a comparison of the proposed method to correlation-based methods. In the following, we use NCorr [Citation3] for a comparison since it is a freely available software package. Note that other state-of-the-art software packages for strain analysis such as Veddac [Citation1] or VIC [Citation2] are based on similar methods. In particular in [Citation36], it is shown that NCorr produces equally good results as VIC. The underlying idea of correlation- based methods is the comparison of windows around each pixel in certain search windows. The window sizes are parameters which must be appropriately chosen. The size of the search window directly influences the computation time and needs to be chosen according to the maximal displacement. The smoothness of the results can be steered by the size of the window around the pixels, similar to the regularization parameters in our model. Due to the extent of this windows, the local resolution of correlation-based methods is limited. Figure shows three examples where the proposed TGV regularized method is compared to NCorr. The first example in Figure shows the same specimen as Figure . Although the cracks are relatively large, it is not possible to resolve them with NCorr and there occur some artefacts around them. Thus, the low resolution is especially a drawback in our applications since we are interested in the local behaviour and in particular cracks. Besides the cracks, the smooth parts look very similar to the result using the proposed method. For the cracks, is a good result. A peak is visible at the crack tip, which is the position where the crack is expected to propagate. In contrast, the result of NCorr shows a peak everywhere around the crack.
Figure 8. Comparison of the proposed model to the correlation-based method NCorr for three different image pairs and enlarged regions.
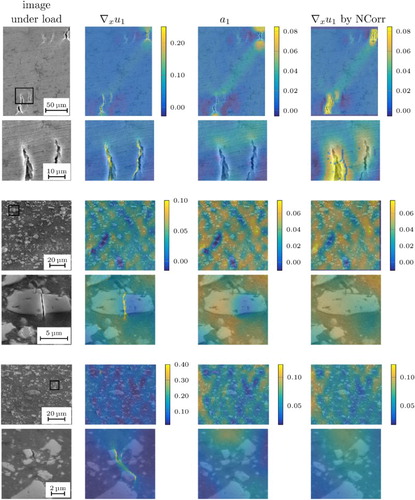
The second and the third example show more complicated deformations. In addition to , we depict the smooth strain part
, that is split off by the TGV regularizer. It is visible that the result of NCorr looks very similar to
, in particular, the same peaks and structures in a degree of
can be observed. But in addition to this smooth part, which resembles the strain in the classical meaning in materials science, our method is able to resolve also the local damage.
In summary, the proposed method is on the one hand able to extract the information that also commercial software extracts. This warrants that the model in general gives correct results from the viewpoint of materials science. On the other hand, it is possible to visualize the local behaviour with a very high resolution where correlation-based methods fail.
4.4. Results for other materials and experimental settings
Finally, we leave the setting of tensile tests and show some results for other experimental settings and materials.
Figure contains results for a compression test of a fibre reinforced aluminium matrix where load was applied in x-direction. Since the material is compressed in x-direction, cracks are expected to open up in y-direction. Hence, we depict also and
since these are more suitable for this setting. Also in this case, the proposed method provides reasonable results and resolves cracks.
Figure 9. Results for a compression test of a fibre reinforced aluminium matrix. (a) Microstructure images of the uncompressed and compressed state and (b) Displacement ,
in
(
) and the strain
,
.
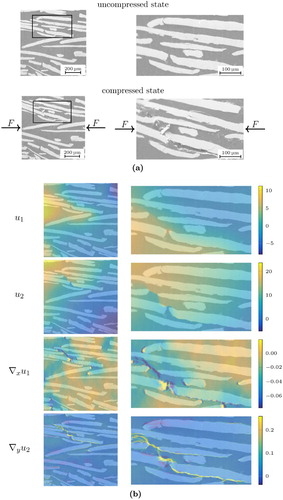
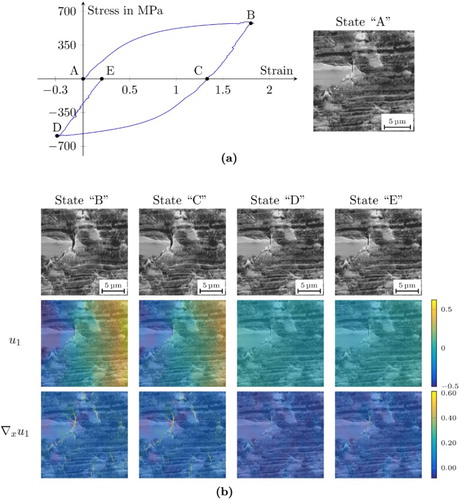
Figure shows the results for a fatigue test. Here, we depict the images and results for one load cycle illustrated in Figure (a). The first image shows the specimen in state ‘A’ without load , then load is applied, i.e. state ‘B’ with
. For the third image, i.e. state ‘C’, the load is released again, i.e.
and then the specimen is compressed to state ‘D’ with
. For the last image in state ‘E’, the load is released again, i.e.
. We use the image of state ‘A’ as the reference image. The computed results are shown in Figure (b). Similar to the previous examples of tensile tests, we see that the strain is positive almost everywhere for the image under load and we see exactly where cracks open up. For state ‘C’, which corresponds to the state after releasing the tension, the strain is mainly positive as well since only the elastic deformation reverses. For the image under compression, the displacement
slightly decreases from left to right and the strain is mainly negative. In the last state ‘E’ after completing the load cycle, the specimen is slightly more strained than in the initial state ‘A’. In particular, the crack in the particle opened up a bit. This is visible in the strain component
. Also the stress–strain curve in Figure (a) shows a positive strain for state ‘E’.
Figure 10. Results for different states of a fatigue test. An exemplary hysteresis curve is shown in (a), the results for the states ‘A’–‘E’ are shown in (b). (a) Hysteresis curve of one cycle of a fatigue experiment and microstructure image of the initial state ‘A’ and (b) Results for the states shown in (a). Displacement in
(
) and the strain
.
5. Conclusions
In this paper, we proposed a variational optical flow model for computing engineering strains on a microscale. Motivated by the setting of tensile tests, several first and the second order terms were evaluated for regularization. The method of our choice is a TGV regularized model with an optional constraint on the strain based on physical assumptions. The primal–dual method for finding a minimum of the corresponding energy function is especially suited since it directly computes the strain tensor within the iteration process. The results of the proposed model can be used for the detection of cracks and for an analysis of crack initiation and propagation. A comparison to state-of-the-art software used for strain analysis showed that the proposed method clearly outperforms this software, in particular when analysing the local strain. Further, it highlights microstructural damage as an additional benefit. We have shown that, besides tensile tests with AMCs, the method is also applicable for different materials as well as in other experiments such as compression and fatigue tests.
Acknowledgements
The authors thank K. Lichtenberg from the ‘Institute for Applied Materials (IAM)’ at the Karlsruhe Institute of Technology (KIT) for providing the data in Figure .
Disclosure statement
No potential conflict of interest was reported by the author(s).
Additional information
Funding
References
- Chemnitzer Werkstoffmechanik GmbH. VEDDAC—digital image correlation software. [cited 2017]. Available at http://www.cwm-chemnitz.de/.
- Correlated Solutions Inc. VIC 2D—digital image correlation software. [cited 2017]. Available at http://correlatedsolutions.com/vic-2d/.
- Blaber J, Adair B, Antoniou A. Ncorr: open-source 2D digital image correlation Matlab software. Exp Mech. 2015;55(6):1105–1122. doi: 10.1007/s11340-015-0009-1
- Scherer S, Werth P, Pinz A. The discriminatory power of ordinal measures—towards a new coefficient. In: IEEE Conference on Computer Vision and Pattern Recognition; Jun 23–25; Fort Collins, CO, USA. IEEE; 1999. p. 76–81.
- Tatschl A, Kolednik O. A new tool for the experimental characterization of micro-plasticity. Mater Sci Eng: A. 2003;339(1–2):265–280. doi: 10.1016/S0921-5093(02)00111-9
- Werth P, Scherer S. A novel bidirectional framework for control and refinement of area based correlation techniques. In: IEEE International Conference on Pattern Recognition. Vol. 3; Sep 3–7; Barcelona, Spain. IEEE; 2000. p. 730–733.
- Horn BK, Schunck BG. Determining optical flow. Artif Intell. 1981;17(1–3):185–203. doi: 10.1016/0004-3702(81)90024-2
- Becker F, Petra S, Schnörr C. Optical flow. In: Scherzer O, editor. Handbook of mathematical methods in imaging, New York: Springer; 2015. p. 1945–2004.
- Alvarez L, Castaño C, García M, et al. Variational second order flow estimation for PIV sequences. Exp Fluids. 2008;44(2):291–304. doi: 10.1007/s00348-007-0402-3
- Holler M, Kunisch K. On infimal convolution of TV-type functionals and applications to video and image reconstruction. SIAM J Imaging Sci. 2014;7(4):2258–2300. doi: 10.1137/130948793
- Corpetti T, Memin E, Perez P. Dense estimation of fluid flows. IEEE Trans Pattern Anal Mach Intell. 2002;24(3):365–380. doi: 10.1109/34.990137
- Trobin W, Pock T, Cremers D, et al. An unbiased second-order prior for high-accuracy motion estimation. In: DAGM Pattern Recognition Symposium; Jun 10–13; Munich, Germany. Berlin: Springer; 2008. p. 396–405.
- Yuan J, Schnörr C, Mémin E. Discrete orthogonal decomposition and variational fluid flow estimation. J Math Imaging Vis. 2007;28:67–80. doi: 10.1007/s10851-007-0014-9
- Yuan J, Schnörr C, Steidl G. Simultaneous higher order optical flow estimation and decomposition. SIAM J Sci Comput. 2007;29(6):2283–2304. doi: 10.1137/060660709
- Ranftl R, Bredies K, Pock T. Non-local total generalized variation for optical flow estimation. In: European Conference on Computer Vision; Sep 6–12; Zurich, Switzerland. Cham: Springer; 2014. p. 439–454.
- Vogel C, Roth S, Schindler K. An evaluation of data costs for optical flow. In: German Conference on Pattern Recognition; Sep 3–6; Saarbrücken, Germany. Cham: Springer; 2013. p. 343–353.
- Braux-Zin J, Dupont R, Bartoli A. A general dense image matching framework combining direct and feature-based costs. In: IEEE International Conference on Computer Vision; Dec 1–8; Sydney, NSW, Australia. IEEE; 2013.
- Hewer A, Weickert J, Seibert H, et al. Lagrangian strain tensor computation with higher order variational models. In: British Machine Vision Conference; Sept 9–13; Bristol, UK. Durham: BMVA Press; 2013.
- Balle F, Eifler D, Fitschen JH, et al. Computation and visualization of local deformation for multiphase metallic materials by infimal convolution of TV-type functionals. In: International Conference on Scale Space and Variational Methods in Computer Vision; May 31–June 4; Lège-Cap Ferret, France. Cham: Springer; 2015. p. 385–396.
- Chambolle A, Lions P-L. Image recovery via total variation minimization and related problems. Numer Math. 1997;76(2):167–188. doi: 10.1007/s002110050258
- Bredies K, Kunisch K, Pock T. Total generalized variation. SIAM J Imaging Sci. 2010;3(3):492–526. doi: 10.1137/090769521
- Setzer S, Steidl G. Variational methods with higher order derivatives in image processing. In: Approximation XII: San Antonio 2007 Mar 4–8; San Antonio, Texas. Brentwood: Nashboro Press; 2008. p. 360–385.
- Setzer S, Steidl G, Teuber T. Infimal convolution regularizations with discrete ℓ1-type functionals. Commun Math Sci. 2011;9(3):797–827. doi: 10.4310/CMS.2011.v9.n3.a7
- Anandan P. A computational framework and an algorithm for the measurement of visual motion. Int J Comput Vis. 1989;2(3):283–310. doi: 10.1007/BF00158167
- Brox T, Bruhn A, Papenberg N, et al. High accuracy optical flow estimation based on a theory for warping. In: European Conference on Computer Vision; May 11–14; Prague, Czech Republic. Berlin: Springer; 2004. p. 25–36.
- Sun D, Roth S, Black MJ. Secrets of optical flow estimation and their principles. In: IEEE Conference on Computer Vision and Pattern Recognition; Jun 13–18; San Francisco, CA, USA. IEEE; 2010. p. 2432–2439.
- Sun D, Roth S, Black MJ. A quantitative analysis of current practices in optical flow estimation and the principles behind them. Int J Comput Vis. 2014;106(2):115–137. doi: 10.1007/s11263-013-0644-x
- Bredies K, Valkonen T. Inverse problems with second-order total generalized variation constraints. In: International Conference on Sampling Theory and Applications; May 2–6; Singapore; 2011.
- Chambolle A, Pock T. A first-order primal–dual algorithm for convex problems with applications to imaging. J Math Imaging Vis. 2011;40(1):120–145. doi: 10.1007/s10851-010-0251-1
- Pock T, Chambolle A, Cremers D, et al. A convex relaxation approach for computing minimal partitions. In: IEEE Conference on Computer Vision and Pattern Recognition; Jun 20–25; Miami, FL, USA. IEEE; 2009. p. 810–817.
- Burger M, Sawatzky A, Steidl G. First order algorithms in variational image processing. In: Glowinski R, Osher S, Yin W, editors. Operator splittings and alternating direction methods. Cham: Springer; 2016. p. 345–407.
- Fitschen JH. Variational models in image processing with applications in the materials sciences [PhD thesis]. Kaiserslautern: University of Kaiserslautern; 2017.
- Rudin LI, Osher S, Fatemi E. Nonlinear total variation based noise removal algorithms. Phys D: Nonlinear Phenom. 1992;60(1):259–268. doi: 10.1016/0167-2789(92)90242-F
- Papafitsoros K, Schönlieb CB. A combined first and second order variational approach for image reconstruction. J Math Imaging Vis. 2014;2(48):308–338. doi: 10.1007/s10851-013-0445-4
- Brox T, Malik J. Large displacement optical flow: descriptor matching in variational motion estimation. IEEE Trans Pattern Anal Mach Intell. 2011;33(3):500–513. doi: 10.1109/TPAMI.2010.143
- Harilal R, Ramji M. Adaptation of open source 2D DIC software Ncorr for solid mechanics applications. In: International Symposium on Advanced Science and Technology in Experimental Mechanics; Nov 1–6; New Delhi, India; 2014.
Appendix 1. Soft and coupled shrinkage
The following two propositions state well-known facts (see e.g. [Citation31]), which are required to compute the proximal maps in Algorithm 1.
Proposition 4
Let . Then,
is given by the soft shrinkage
(A1)
(A1)
Proposition 5
Let . Then,
is given by the grouped or coupled shrinkage
Computation of (Equation12(12)
(12) ).Finally, we compute for given
the value
where
. We need to distinguish the following cases:
For
The following proposition provides a solution to the minimization problem.
Proposition 6
Let . Then, the unique minimizer of
is given by
Proof.
Since F is not differentiable at , we distinguish whether
or not.
Remark 7
The soft shrinkage (EquationA1(H1)
(H1) ) is obtained in the special case
and
.