
 ?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.
?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.Abstract
This paper is devoted to the problem of determining the initial data for the backward non-homogeneous time fractional heat conduction problem by the Fourier truncation method. The exact solution for the forward and backward fractional heat problems is expressed in terms of eigen function expansion and Mittag–Leffler function. Due to the instability of determining initial data, a regularized truncated solution is considered. Further, the stability estimate for the exact solution and the convergence estimates for the regularized solution using an á-priori choice rule and an á-posteriori choice rule are derived.
1. Introduction
Currently, a lot of research activities on the time fractional diffusion equations has been taking place due to its importance in several areas of science and engineering such as for describing the memory as well as hereditary properties for super diffusion and subdiffusion phenomena in the theory of plasma turbulence [Citation1,Citation2], random walks [Citation3,Citation4], viscoelastic material, biological systems [Citation5] and in various other physical models [Citation6]. Not only in physics and biological sciences, fractional heat equation has rich mathematical treatments on numerical simulation and regularity results (see, e.g. [Citation7–13]). For heat conduction problems with time fractional partial derivative, one may be interested in the inverse problem determining boundary or initial data, or diffusion coefficients, or source term using certain measurements. Such problems are ill-posed, in the sense that small perturbations in the data can lead to large deviations in the solutions (see, e.g. [Citation14,Citation15]).
Throughout the paper, we take and
for some
. We consider the non-homogeneous time fractional heat equation
(1)
(1) along with the following conditions:
(2)
(2) for
. Here,
is the α-order time fractional partial derivative of u with respect to t, that is,
For a known source function
, the time fractional backward heat conduction problem (TFBHCP) that we consider is the following inverse problem.
Given and
, find
satisfying (Equation1
(1)
(1) ) and (Equation2
(2)
(2) ), and the final value requirement
.
Thus the problem is to solve Equation (Equation1(1)
(1) ) satisfying (Equation2
(2)
(2) ) and the requirement
(3)
(3) We shall see that the above problem of determining
for t>0 is well-posed, whereas determining
is ill-posed, in the sense that small perturbations in the data η can result in large deviation in the solution.
For a function and
, by abusing the notation, we shall denote the function
from Ω to
by
. Thus
Thus
if and only if the function
is an
-valued measurable function such that
It is known that
is a Banach space with norm
We are concerned with the problem of determining the initial temperature
from the measured final temperature
and the measured source term
with some noise level
. As this problem is known to be ill-posed, some regularization method is required for obtaining stable approximations for a sought solution. For detailed study on regularization of partial differential equation and for regularization of linear ill-posed operator equations, one may refer Isakov [Citation16] and Nair [Citation17], respectively.
In the literature, we can find a few papers on recovering initial data for homogeneous TFBHCP, that is for f=0, by some regularization methods, such as quasi reversibility [Citation18] in 2010, data regularization [Citation19] and boundary condition regularization [Citation20] in 2013, Tikhonov scheme [Citation21] in 2013, modified quasi boundary value method [Citation22] in 2014 and generalized Tikhonov scheme [Citation23] in 2017. Very recently, Tuan et al. in [Citation24] and [Citation25] considered non-homogeneous TFBHCP of determining initial data from final data and source term by using a quasi boundary value method and Tikhonov method respectively.
It is clear that the research work related to the problem of determining initial data from final and source data for TFBHCP is still in the initial stage. Motivated by this fact, this work is devoted to the problem of determining the initial data for the non-homogeneous TFBHCP by the measured final data and the measured source term with some noise level, by using the standard easy-to-comprehend procedure of the Fourier Truncation method.
This paper is organized as follows: In Section 2, basic results from fractional calculus are stated. After that, the solution for the forward and backward time fractional heat conduction problems is derived. We also show that problem of determining for t>0 is well-posed, whereas determining
is ill-posed, in the sense that small perturbations in the data η can result in large deviation in the solution. In Section 3, instability of initial data and its conditional stability under the priori bound are analysed. In Sections 4 and 5, a regularized solution is formulated by cutting off the high frequencies on Fourier coefficients and choosing the number of Fourier coefficients (regularization parameter) depending on the error level in the noisy data. Further, we obtain error estimates for the regularized solution by choosing the regularization parameter, namely the level of truncation, by an á-priori as well as an á-posteriori rules.
2. Preliminaries
2.1. Some basic results from fractional calculus
Let us recall the definition and some results associated with Riemann–Liouville fractional integral, Caputo fractional derivative and Mittag–Leffler function as given in [Citation26,Citation27].
In this paper, we shall be concerned only with left Riemann–Liouville fractional integral and left Caputo fractional derivative, and we denote them by and
, respectively, and we denote
by
. Thus
We may recall that Riemann–Liouville fractional integral and Caputo fractional derivative can be defined for any
and for
for appropriate functions (see [Citation26]). However, we restrict these definitions to the case of
and
.
Recall also that (see [Citation27]), for and
, the Mittag–Leffler function
is defined by
We shall denote
by
, that is,
We may observe that the above function is a generalization of the exponential function
, in the sense that
. Further, we also have
Associated with
, we quote a few results, which we shall use in the due course.
Lemma 2.1
(cf. [Citation13], Lemma (3.2) and (3.3)) For and
, the following are true.
The function
is continuous on
The function
Lemma 2.2
(cf. [Citation18]) Let . Then there exists positive constants
and
, depending on
, such that
(4)
(4) for all
and for all
Corollary 2.3
(cf. [Citation21]) Let and
. Then there exist positive constants
, depending on
such that
(5)
(5) for all
and for all
.
2.2. Solution for the forward fractional heat conduction problem
For and
, consider the non-homogeneous forward time fractional heat conduction problem,
(6)
(6) along with the boundary conditions
(7)
(7) and the initial condition
(8)
(8) It can be shown that
as
. Hence, in the limiting case, the heat equation (Equation6
(6)
(6) ) is reduced to the standard heat equation. We shall also see that ( see Theorem 2.6) if
is a solution of (Equation6
(6)
(6) ), (Equation7
(7)
(7) ), (Equation8
(8)
(8) ), and if
for
, then
satisfies the standard heat equation
(9)
(9) along with the conditions in (Equation7
(7)
(7) ) and (Equation8
(8)
(8) ).
With the help of the following lemmas, we shall represent the solution of the forward fractional heat conduction problem (Equation6(6)
(6) )–(Equation8
(8)
(8) ).
Throughout the paper, we use the notation
for
and
. Note that
is an orthonormal basis of
. Also, for
, we denote the
-inner product of g with
, namely,
by
, that is,
and for a function
and
, we denote
by
, that is,
For
and
, we shall denote
Lemma 2.4
(cf. [Citation28], Lemma 2.9) For , and
, the function
defined by
(10)
(10) satisfies the fractional initial value problem
(11)
(11)
The following result on forward fractional heat conduction problem (Equation6
(6)
(6) )–(Equation8
(8)
(8) ) is well known [12].
Theorem 2.5
Let . For
and
, the function
defined by
(12)
(12) is the solution of the forward fractional heat conduction problem (Equation6
(6)
(6) )–(Equation8
(8)
(8) ).
Hereafter, for and
,
, and
, we shall also use the notation
(13)
(13) The next theorem shows how the solution of the standard heat equation (Equation9
(9)
(9) ) along with the boundary condition (Equation7
(7)
(7) ) and the initial condition (Equation8
(8)
(8) ) is the limit of
as
. This result is known and is stated in the literature. As the form of the solution is used throughout the paper, we include its proof also.
Theorem 2.6
For , let
be the solution of the forward fractional heat conduction problem (Equation6
(6)
(6) )–(Equation8
(8)
(8) ),
where
is as in (Equation13
(13)
(13) ). Then
exists, and it is the solution of the standard heat equation (Equation9
(9)
(9) ) along with the boundary condition (Equation7
(7)
(7) ) and the initial condition by (8).
Proof.
Let . For
, let
where
is as in (Equation13
(13)
(13) ). Recall from Corollary 2.3 and Lemma 2.1 (ii) that
for any
. Also,
and
Thus, for
, using Lemma (2.1) (ii), we have
(14)
(14) and hence
Since
converges, it then follows that
uniformly
.
On the other hand, using the facts that
for all
, we have
Thus for each
,
uniformly for
as
, and
for every
.
Hence, by a standard theorem in analysis (see Theorem 7.11 in Rudin [Citation29]),
Note that
and it is the solution of the standard heat equation (Equation9
(9)
(9) ) along with the boundary condition (Equation7
(7)
(7) ) and the initial condition (Equation8
(8)
(8) ).
3. Existence of solution for TFBHCP
The following theorem, proved in [Citation24], gives conditions on the functions η and f in (Equation3(3)
(3) ) and (Equation1
(1)
(1) ), respectively, so that the TFBHCP (Equation1
(1)
(1) )–(Equation3
(3)
(3) ) with
has a unique solution.
Theorem 3.1
For and
, the TFBHCP (Equation1
(1)
(1) )–(Equation3
(3)
(3) ) has a unique solution if and only if
(15)
(15) and it is given by
(16)
(16) for
and
.
3.1. Solution under noisy data
Let us denote by the solution
defined as in (Equation16
(16)
(16) ) corresponding to the data
. Then the following theorem shows that
depends continuously on the data
whenever
.
Theorem 3.2
Let and
. Then, for
,
where
and
.
Proof.
Let and let
be as in (Equation13
(13)
(13) ) with f replaced by
. Then
for
so that
where
By Lemma 2.2, we have
(17)
(17) where
Therefore,
Using the relation
, we have
where
Thus
We observe that
Using Lemma 2.1(ii), we have
for all
. Hence, using the fact that
, we obtain
where
and
. Thus, for
,
This completes the proof.
Remark 3.3
Although the above theorem shows that depends continuously on the data
whenever
, the same is not guaranteed when t=0. To see this consider the error
when t=0. In this case, we have
where
Hence, using the estimate in (Equation17
(17)
(17) ), we have
In particular, with
we have
Since
, the above inequality shows that small error in the data can lead to large deviations in the solution. In other words, the problem of determining solution at t=0 is ill-posed. This issue is further investigated in the following sections.
3.2. Ill-posedness of determining initial data and stability estimates
Recall from (Equation16(16)
(16) ) that the solution
of the TFBHCP (Equation1
(1)
(1) )–(Equation3
(3)
(3) ) for
is given by
where
is defined as in (Equation13
(13)
(13) ). For t=0, we have
(18)
(18) Thus the problem of determining initial data
from final data
and source term
can be written as an operator equation,
(19)
(19) where K is the integral operator from
into itself defined by
(20)
(20) with kernel
defined by
and
(21)
(21) At this point, we observe that
, as the following lemma shows.
Lemma 3.4
Let and
. Then h is defined as in (Equation21
(21)
(21) ) belongs to
and
where
Proof.
Note that, for each ,
Hence, by (Equation14
(14)
(14) ),
Therefore,
This completes the proof.
It can be shown that . Therefore,
is compact operator of infinite rank. Hence K does not have continuous inverse [Citation17].
Thus the problem of determining the initial data from the data
, where
, need not have a solution, and if a solution exists, it does not depend continuously on the data. Thus the problem of solving (Equation19
(19)
(19) ) is ill-posed.
For , define the space
It can be shown that
is a Hilbert space with the inner product
and the corresponding norm
given by
and
respectively (see [Citation30], p.142–144). Note that
for every
.
In this paper, we assume that the final data η and the source term f are such that Equation (Equation19(19)
(19) ) has a unique solution ψ. For a given
, consider the source set.
(22)
(22) Now, we have one of the main theorems of this paper giving stability estimates associated with the ill-posed problem of determining the initial condition from the knowledge of the final value and the source term.
Theorem 3.5
Let be as in (Equation18
(18)
(18) ). If
for some
, then
(23)
(23) where
is as in (Equation5
(5)
(5) ).
Further, if for some
and
for some
, then
(24)
(24)
Proof.
From the representation (Equation18(18)
(18) ) for ψ and using Hölder's inequality, we have
(25)
(25)
(26)
(26)
where
Recall from (Equation18
(18)
(18) ) that
Hence, using the estimate (Equation5
(5)
(5) ),
(27)
(27) Note also that
Thus (Equation26
(26)
(26) ) implies (Equation23
(23)
(23) ). Also, by Lemma 3.4,
so that (Equation24
(24)
(24) ) also follows.
4. Fourier truncation method and convergence estimates
Let us assume that the data are available only with some noise, and let the noisy data be
with some known noise level, say
(28)
(28) for some
. For the sake of simplicity of presentation of the analysis that follows, we assume that
(29)
(29) for some
. In fact, (Equation28
(28)
(28) ) implies (Equation29
(29)
(29) ) with
If we write
Then, by Lemma 3.4 together with (Equation29
(29)
(29) ), we obtain
(30)
(30) Corresponding to the data
and
, let
and
, respectively, be the solution of the TFBHCP (Equation1
(1)
(1) )–(Equation3
(3)
(3) ), that is, (Equation16
(16)
(16) ),
where
is as in (Equation13
(13)
(13) ) and
is obtained from (Equation13
(13)
(13) ) by replacing f by
. Let us denote the nth truncation of the series corresponding to the exact data
and noisy data
by
and
, respectively, that is,
(31)
(31)
(32)
(32) Thus the nth truncated approximations of
and
are given by
(33)
(33) and
(34)
(34) respectively.
4.1. Convergence estimate under à-priori parameter choice
Our goal is to choose a regularization parameter such that
as
and also to obtain estimates for the error
.
Theorem 4.1
Let ψ, and
be as in (Equation18
(18)
(18) ), (Equation33
(33)
(33) ) and (Equation34
(34)
(34) ) respectively. Let
be as in (Equation5
(5)
(5) ). Assume that ψ belongs to the source set
in (Equation22
(22)
(22) ) and
satisfies (Equation29
(29)
(29) ). Then
(35)
(35) If
, then
(36)
(36)
Proof.
First let us obtain an estimate for . Note that
Next, we obtain a bound for
. For this, first we note from (Equation33
(33)
(33) ) and (Equation34
(34)
(34) ) that
where
and
. Now, by the relation (Equation5
(5)
(5) ) and Lemma 3.4, we obtain
Thus
Since
for all
, we obtain the estimate (Equation35
(35)
(35) ).
Next, note that
Hence, taking
the largest positive integer less than or equal to
, from (Equation35
(35)
(35) ), we obtain the inequality (Equation36
(36)
(36) ).
4.2. Convergence estimate under á-posteriori parameter choice
In the last section, we obtained an error estimate (Equation36(36)
(36) ) corresponding to the regularized solution
by choosing N á priorily, as this N depends on ρ and δ appearing in the source set
. Now, following some of the standard procedures (see, e.g. [Citation31] and the references therein), we choose the regularization parameter N a posteriori and obtain the same order for the error estimate.
First, let us recall from Section 3 that the problem of determining initial data from final data
and source term f is same as solving the operator equation (Equation19
(19)
(19) ), that is,
(37)
(37) where K is the integral operator on
defined by (Equation20
(20)
(20) ) and
, where
are given by (Equation18
(18)
(18) ), that is,
Throughout, we assume that
.
Now, corresponding to the noisy data , let
We assume that
and
satisfy the relation (Equation29
(29)
(29) ) for some
, so that (Equation30
(30)
(30) ) is satisfied, that is
Let
and
be the nth truncation of h and
, respectively, that is
Since
and
are the Fourier coefficients of h and
, respectively, we have the convergence
Let us denote
(38)
(38) Since
as
and
, for any fixed
and for every
small enough, say
for some
, there exists
such that
Let
be the first N satisfying the above inequality. That is,
(39)
(39) Choosing
, the following lemma gives a bound for
in terms of δ and μ.
Lemma 4.2
Let and
be defined as in (Equation39
(39)
(39) ). Assume that
. Then
(40)
(40)
Proof.
Let be as in (Equation39
(39)
(39) ). Note that for
,
Recall from (Equation18
(18)
(18) ) that
Hence, using the inequalities in (Equation5
(5)
(5) ) and the fact that
, we have
Thus, since
, we have
(41)
(41) On the other hand, using the estimates
and
we have
(42)
(42)
From (Equation41
(41)
(41) ) and (Equation42
(42)
(42) ), we obtain
from which the inequality (Equation40
(40)
(40) ) for
follows.
Theorem 4.3
Let ψ and be as in (Equation18
(18)
(18) ) and (Equation34
(34)
(34) ), respectively, and let
be as in (Equation22
(22)
(22) ). Assume that
and
satisfies (Equation29
(29)
(29) ), and
is as in (Equation39
(39)
(39) ) with
. Then
(43)
(43) where
with
and
are as in (Equation5
(5)
(5) ).
Proof.
Let . From (Equation33
(33)
(33) ) and (Equation34
(34)
(34) ), using the relation
in (Equation5
(5)
(5) ) and the inequality (Equation30
(30)
(30) ), we have
(44)
(44) Next, we obtain a bound for
. Using the relations as in (Equation25
(25)
(25) ) and (Equation27
(27)
(27) ), we have
Since
and
we have
Hence,
(45)
(45) Now, triangle inequality and the estimates (Equation44
(44)
(44) ) and (Equation45
(45)
(45) ) give
Hence, using the estimate for
from Lemma 4.2, we obtain
This completes the proof.
5. Numerical results
In this section, a numerical illustration is presented to show the efficiency of the regularization method that we considered in this paper. Our acknowledgements are due to Mathworks for the MATLAB R2017a and to Igor Podlubny for the computation of Mittag–Leffler function given in the mlf.m file.
For , consider the time fractional heat conduction problem (Equation6
(6)
(6) )–(Equation8
(8)
(8) ) with the source function.
5.1. Numerical procedure
For the purpose of numerical illustration, we take the sought for initial temperature as
and then find the final value
using (Equation12
(12)
(12) ), and then determine regularized approximations of ψ by the Fourier truncation method.
The approximations on the initial function from the noisy final temperature and the noisy source term will be done along the following steps for different α's such as .
Final value
We take p=2. Then
Noisy data and regularized solution: The noisy data
Discretization process: To approximate the integrals, we make use of the trapezoidal rule. For that consider the equidistant grid for the space and the time variables
Error estimates: The absolute error estimate (AEE) and the relative error estimate (REE) between the exact and the regularized solution are obtained by the following formula:
5.2. Results and discussion
For p=2, using we take
which helps to find
and
for various noise level δ and α along with
.
In the figures, ψ denotes the exact solution and denotes the regularized solution
corresponding to the noise level δ. According to the a-priori and a-posteriori choice rule, the exact solution ψ and its approximations are plotted in Figures – and Figures –, respectively for various
. Further, Tables and and Tables and give the estimates for the error between the exact solution and the truncation solution corresponding to the priori and posteriori parameter choices, respectively.
Figure 1. Exact and truncated solution for different δ with .
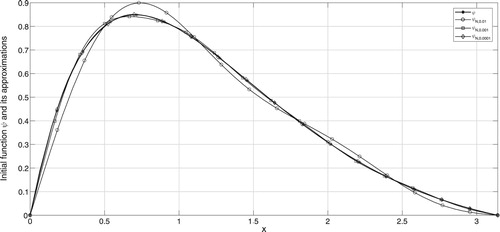
Figure 2. Exact and truncated solution for different δ with .
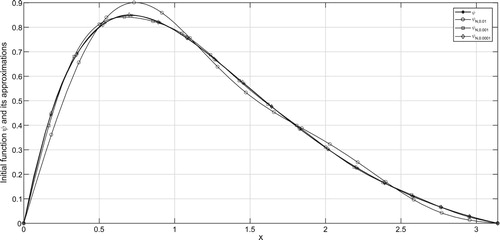
Figure 3. Exact and truncated solution for different δ with .
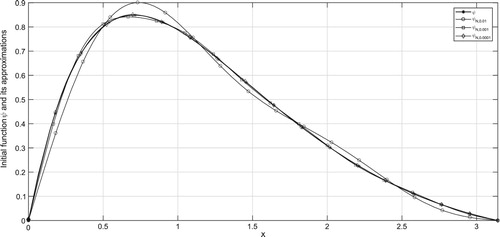
Figure 4. Exact and truncated solution for different δ with .
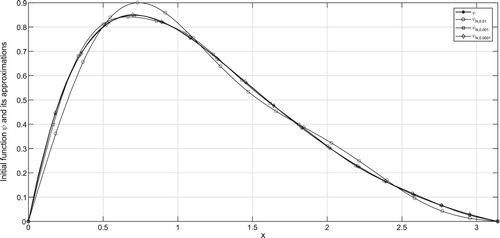
Figure 5. Exact and truncated solution for different δ with .
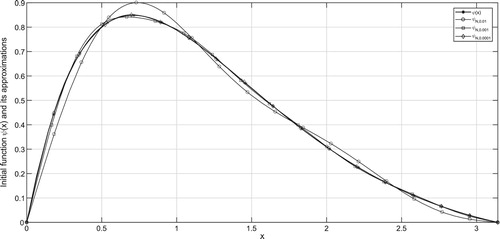
Figure 6. Exact and truncated solution for different δ with .
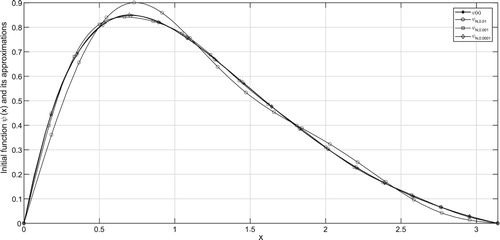
Figure 7. Exact and truncated solution for different δ with .
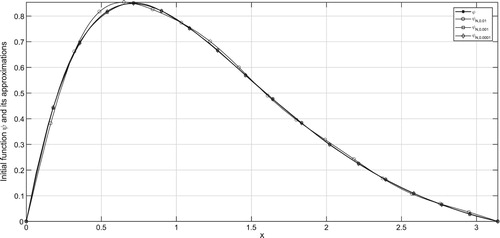
Figure 8. Exact and truncated solution for different δ with .
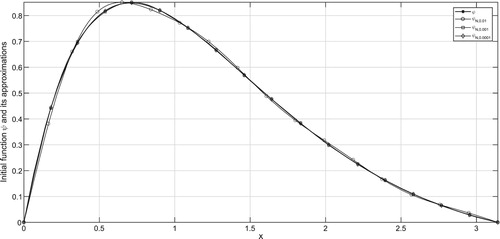
Figure 9. Exact and truncated solution for different δ with .
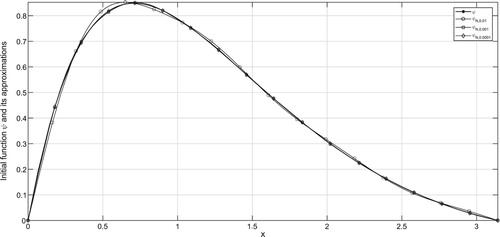
Figure 10. Exact and truncated solution for different δ with .
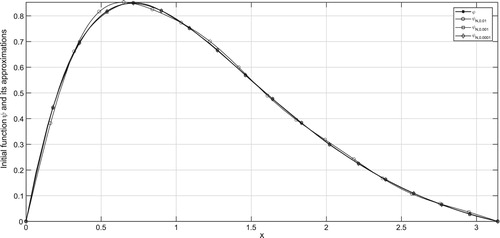
Figure 11. Exact and truncated solution for different δ with .
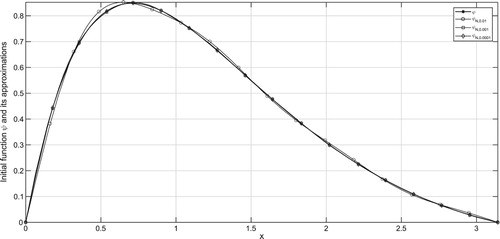
Figure 12. Exact and truncated solution for different δ with .
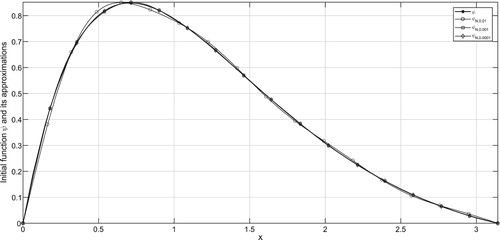
Table 1. Relative and absolute error estimates for different δ and α values.
It can be seen from the figures that larger values of N result in stable solution and smaller values of N result with better approximations. From Tables , one can easily find that smaller values of α give better regularized solutions.
Table 2. Relative and absolute error estimates for different δ and α values.
Table 3. Relative and absolute error estimates for different δ and α values.
Table 4. Relative and absolute error estimates for different δ and α values.
Acknowledgements
The first author would like to acknowledge the support received from Indian Institute of Technology Madras and also the excellent facilities provided by the Department of Mathematics at Indian Institute of Technology Madras. Further, the authors thank the referees for their comments and suggestions which made the revised version better in many respects.
Disclosure statement
No potential conflict of interest was reported by the authors.
Additional information
Funding
References
- Del Castillo Negrete D, Carreras BA, Lynch VE. Fractional diffusion in plasma turbulence. Phys Plasmas. 2004;11:3854–3864. doi: 10.1063/1.1767097
- Del Castillo Negrete D, Carreras BA, Lynch VE. Nondiffusive transport in plasma turbulence: a fractional diffusion approach. Phys Rev Lett. 2005;94:065–003. doi: 10.1103/PhysRevLett.94.065003
- Gorenflo R, Mainardi F, Moretti D, et al. Fractional diffusion: probability distributions and random walk models. Phys A Stat Mech Appl. 2002;305:106–112. doi: 10.1016/S0378-4371(01)00647-1
- Metzler R, Klafter J. The random walks guide to anomalous diffusion: a fractional dynamics approach. Phys Rep. 2000;339:1–77. doi: 10.1016/S0370-1573(00)00070-3
- Kneller G. Anomalous diffusion in biomolecular systems from the perspective of non-equilibrium statistical physics. Acta Phys Pol B. 2015;46:1167–1199. doi: 10.5506/APhysPolB.46.1167
- Nigmatullin RR. The realization of the generalized transfer equation in a medium with fractal geometry. Phys Status Solidi B. 1986;133:425–430. doi: 10.1002/pssb.2221330150
- Gorenflo R, Luchko Y, Mainardi F. Wright functions as scale-invariant solutions of the diffusion-wave equation. J Comput Appl Math. 2000;118:175–191. doi: 10.1016/S0377-0427(00)00288-0
- Gorenflo R, Luchko Y, Yamamoto M. Time-fractional diffusion equation in the fractional Sobolev spaces. Frac Calc Appl Anal. 2015;18:799–820.
- Kubica A, Yamamoto M. Initial-boundary value problems for fractional diffusion equations with time-dependent coefficients. Frac Calc Appl Anal. 2018;21:276–311. doi: 10.1515/fca-2018-0018
- Li Z, Liu Y, Yamamoto M. Initial-boundary value problems for multi-term time-fractional diffusion equations with positive constant coefficients. Appl Math Comput. 2015;257:381–397.
- Liu Y, Rundell W, Yamamoto M. Strong maximum principle for fractional diffusion equations and an application to an inverse source problem. Frac Calc Appl Anal. 2016;19:888–906.
- Luchko Y. Initial boundary value problems for the one dimensional time fractional diffusion equation. Frac Calc Appl Anal. 2012;15:141–160.
- Sakamoto K, Yamamoto M. Initial value boundary value problems for fractional diffusion wave equation and applications to some inverse problems. J Math Anal Appl. 2011;382:426–447. doi: 10.1016/j.jmaa.2011.04.058
- Cheng J, Nakagawa J, Yamamoto M, et al. Uniqueness in an inverse problem for a one dimensional fractional diffusion equation. Inverse Probl. 2009;25:115002. doi: 10.1088/0266-5611/25/11/115002
- Li Z, Yamamoto M. Uniqueness for inverse problems of determining orders of multi-term time fractional derivatives of diffusion equation. Appl Anal. 2015;94:570–579. doi: 10.1080/00036811.2014.926335
- Isakov V. Inverse problems for partial differential equations. Berlin: Springer-Verlag; 2006.
- Nair MT. Linear operator equation: approximation and regularization. Singapore: World Scientific; 2009.
- Liu JJ, Yamamoto M. A backward problem for the time fractional diffusion equation. Appl Anal. 2010;89:1769–1788. doi: 10.1080/00036810903479731
- Wang L, Liu J. Data regularization for a backward time fractional diffusion problem. Comput Math Appl. 2012;64:3613–3626. doi: 10.1016/j.camwa.2012.10.001
- Yang M, Liu J. Solving a final value fractional diffusion problem by boundary condition regularization. Appl Numer Math. 2013;66:45–58. doi: 10.1016/j.apnum.2012.11.009
- Wang JG, Wei T, Zhou YB. Tikhonov regularization method for a backward problem for the time-fractional diffusion equation. Appl Math Model. 2013;37:8518–8532. doi: 10.1016/j.apm.2013.03.071
- Wei T, Wang J. A modified quasi boundary value method for the backward time fractional diffusion problem. ESAIM Math Model Num. 2014;48:603–621. doi: 10.1051/m2an/2013107
- Zhang H, Zhang X. Generalized Tikhonov method for the final value problem of time-fractional diffusion equation. Int J Comput Math. 2017;94:66–78. doi: 10.1080/00207160.2015.1089354
- Tuan NH, Long LD, Nguyen VT, et al. On a final value problem for the time fractional diffusion equation with inhomogeneous source. Inverse Probl Sci En. 2016. doi:10.1080/17415977.2016.1259316.
- Tuan NH, Long LD, Tatar S. Tikhonov regularization method for a backward problem for the inhomogeneous time-fractional diffusion equation. Appl Anal. 2018;97:842–863. doi:10.1080/00036811.2017.1293815.
- Kilbas AA, Srivastava HM, Trujillo JJ. Theory and applications of fractional differential equations. Amsterdam: Elsevier; 2006.
- Podlubny I. Fractional differential equations. London: Academic Press; 1999.
- Wei T, Zhang ZQ. Robin coefficient identification for a time-fractional diffusion equation. Inverse Probl Sci Eng. 2014;24:647–666. doi: 10.1080/17415977.2015.1055261
- Rudin W. Principles of mathematical analysis. Singapore: McGraw-Hill; 1976.
- Kress R. Linear integral equations. 3rd ed New York: Springer; 2014.
- YX Zhang, Fu CL, Deng ZL. An a posteriori truncation method for some Cauchy problems associated with Helmholtz-type equations. Inverse Probl Sci Eng. 2013;21:1151–1168. doi: 10.1080/17415977.2012.743538