
 ?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.
?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.Abstract
The problem of determining an unknown piecewise-continuous refractive index of an inhomogeneous scatterer is considered. The boundary value problem is reduced to the Lippmann–Schwinger integral equation. The solution of the inverse problem is obtained in two steps. At the first step, the integral equation of the first kind is solved in the inhomogeneity region using measured values of the total field outside the region. It is proved that the solution to the integral equation of the first kind is unique in the class of piecewise constant functions. At the second step, the unknown refractive index is explicitly calculated via the found solution of the integral equation and the given total field. The proposed method was implemented and verified by solving a test inverse problem with a given refractive index. Efficiency of the two-step method was approved by comparison between the exact solution and the approximate ones.
1. Introduction
The present paper describes a novel two-step method (TSM) for solving a two-dimensional inverse problem of recovering the refractive index of an inhomogeneous lossy scatterer.
Formulations of inverse problems in the two-dimensional space have been considered through several decades (see, e.g. [Citation1,Citation2] and the bibliography therein) and are relevant up to now [Citation3–5].
One of the approaches to solving such problems involves minimizing some error functionals. Such methods include Tikhonov regularization of the minimized functionals as well as iterative procedures that require a good initial approximation [Citation6].
In [Citation7] there was proposed a novel iterative technique that converges globally, i.e. it does not require a good initial approximation. Papers [Citation8–10] represent more advanced globally convergent algorithms (the so-called convexification approach) for coefficient inverse problems. This approach based on the construction of a weighted globally strictly convex cost functional eliminates the phenomenon of multiple local minima of least-squares cost functionals and provides the global convergence to the correct solution of the gradient projection method.
We propose a non-iterative approach for identifying an unknown function represents the contrast source of an inhomogeneous scatterer of a monochromatic wave. This approach was first used in [Citation11] and was named the TSM for solving inverse problems of recovering an unknown refractive index (the method is also described in [Citation12]).
The paper is organized as follows.
In Section 2, we consider the direct problem of diffraction by an inhomogeneous obstacle characterized by a piecewise-continuous refractive index. The original boundary value problem (BVP) for the Helmholtz equation is given in the quasiclassical formulation [Citation13] which differs from the one considered in [Citation14] and is seemingly more relevant from the physical point of view.
Since TSM is based on the contrast source integral representations, it is important to prove the equivalency between the original BVP and used system of integral equations (IEs). This system is shown to be an equivalent formulation of the diffraction problem and includes the Lippmann–Schwinger equation (LSE) which follows from the BVP. We prove theorems on the smoothness of solutions to the LSE and establish its unique solvability. This study is given in Section 2.2.
In the next section, the statement of the inverse problem is given, and the TSM for its solving is described. The method consists in solving a linear IE of the first kind (step 1) with respect to the current (here
is the total field,
is the given wave number of free space), followed by an explicit calculation of the sought-for refractive index k (step 2).
The IEs used in TSM are well known under the name of source-type IEs (see, e.g. [Citation15,Citation16] and the bibliography therein). However, we use another approach for their studying. In this work, the linear IE of the first kind is solved with subsequent explicit calculation of the unknown function whereas in [Citation15] authors use an error functional minimization technique.
Solving the used IE is known to be an ill-posed problem since the uniqueness of a solution is not guaranteed; we show that the corresponding homogeneous IE has an infinite set of smooth solutions. However, it can be proved that the solution to the IE is unique in the class of piecewise constant functions. The sufficient conditions for the IE unique solvability are represented in Section 3.2.
Such a choice of the solution space is seemingly valid for several reasons. First, we use piecewise constants for the approximation of the function rather than for studying discontinuous currents. Further, the total field u corresponding to the piecewise constant J satisfies the smoothness conditions which are formulated in the direct problem. That is due to the representation of the field u via the potential with the density J. Finally, application of piecewise constant functions with rectangular support is a relevant approach for solving some practical problems, e.g. diffraction by nanomaterials which have a periodic structure with a rectangular grid. In such problems, the grid is given, whereas the values of an unknown function (e.g. permittivity) are to be found.
In TSM, we define (and fixate) the computational grid. Therefore, classical theorems on the convergence of the method are not considered in the article. Such an approach is valid in practice since it is usually clear what accuracy (and, consequently, what grid) is needed. For example, it is sufficient to consider grids with 2 to 5 mm step in the method of microwave tomography for the breast cancer early diagnosis (thus, any grid refinement is no use).
The last section of the paper is concerned with numerical experiments whose results are represented in Figures . The modelling of the inverse scattering problem is organized as follows. At the beginning, we define the wave number of the space and the function
which represents the space-dependent contrast of the scattering object. Then we solve the direct problem of diffraction of a given field
with respect to the total field
In all experiments, we consider the incident field
of a point source located outside the scatterer. Thus, we obtain the synthetic field data. Further, the TSM is applied for solving the model inverse problem. At the first step, we use the contrast source integral representation outside the scatterer and numerically solve the IE of the first kind to find the current J, being the product of the contrast of the scattering object and the total field. At the second step we explicitly calculate the sought-for function
using the LSE.
Figure 1. The given function
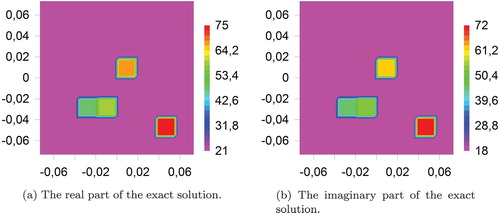
Figure 2. The approximate solution of the inverse problem with noiseless data.
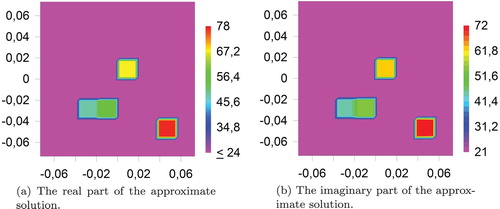
Figure 3. The approximate solution of the inverse problem with noisy data. The noise level is denoted by
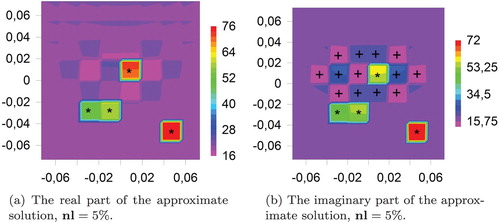
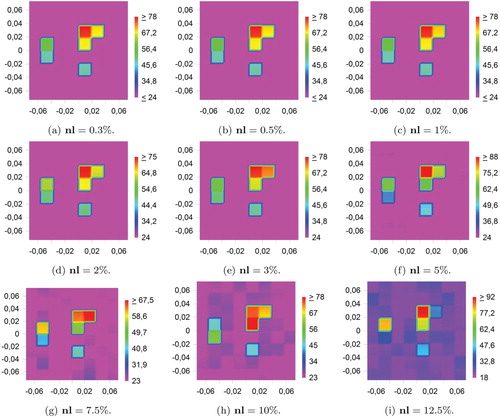
Figure 4. Solutions' real part obtained before the data processing at various noise levels (denoted by ).
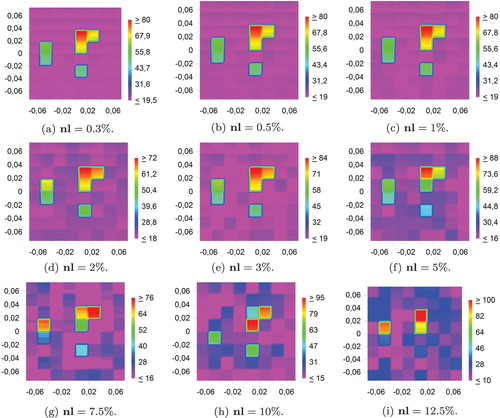
Figure 5. Real part of two solutions used for postprocessing: the data is noisy, True inhomogeneities and artefacts are marked by * and +, respectively.
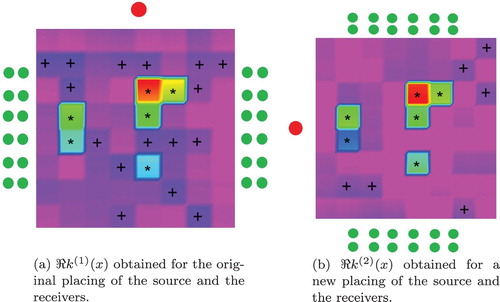
Figure 6. Solutions' real part obtained after pre- and postprocessing at various noise levels (denoted by ).
Section 4 also contains comments on the implementation of the numerical method for solving the inverse problem, as well as a detailed description of our technique of solutions' refinement. The refinement is made in two steps. First, we propose to filter the noise of near field data. Second, we propose a postprocessing procedure for finding true inhomogeneities in a more accurate way, as well as for excluding artefacts and levelling of the background. The numerical simulation shows high efficiency of the proposed methods if the noise is less than 5% of the pure data.
2. Direct problem of diffraction
We consider the problem of diffraction in the two-dimensional unbounded space filled with isotropic medium. The homogeneous space is characterized by a given wave number
where
and c>0 are, respectively, the frequency and the speed of the incident wave
2.1. Statement of the direct problem of diffraction
We consider the problem of diffraction of a monochromatic wave by a rectangular scatterer P,
We introduce the mesh of nodes
and the set of finite elements
k=1,2 and
We denote the unions of vertices and sides of the rectangles by
and
respectively, and introduce the notation
Define piecewise constant functions in the region P,
(1)
(1) and assume that P is an inhomogeneous domain characterized by a piecewise Hölder function
More precisely,
at
and
are Hölder continuous functions in
where
Remark 2.1
According to the above assumptions, the unknown (or
) can be a discontinuous function that has jumps on
or a continuous function. Thus, one can also consider a function
Introduce the multi-index and define the function
for each
by equality
At points
the function
can be defined via the one-sided limit from any side of the line
We represent the total field via the sum
where
is the scattered field. Since the fields depend on time harmonically, then it suffices to formulate the scattering problem for the scalar complex amplitude
of the total field.
We define the incident wave as follows:
(2)
(2)
Here is the Hankel function of the first kind [Citation17], and
is a fixed point outside
The field
is a solution to equation
satisfying the Sommerfeld radiation conditions
The direct problem of diffraction is to find a function
(3)
(3) which satisfies the Helmholtz equation
(4)
(4) as well as the transmission conditions
(5)
(5) the energy finiteness condition
(6)
(6) and the Sommerfeld radiation conditions
(7)
(7)
Any solution of problem (Equation4(4)
(4) )–(Equation7
(7)
(7) ) satisfying continuity conditions (Equation3
(3)
(3) ) is called a quasiclassical solution to the direct scattering problem in differential statement
Let us prove the uniqueness of a solution to the problem
Theorem 2.1
For any wave number and any function
such that
the problem
has at most one quasiclassical solution.
Proof.
Since is a linear boundary value problem, it is sufficient to show that the homogeneous problem with
in
has only the trivial solution
1. Let B be a sufficiently large circle of radius R such that Define the bounded domain
with the boundary
and the unbounded region
The boundary value problem for u can be reduced to a transmission problem in the subdomains Q and W. The problem is to find the function
which satisfies the Helmholtz equations,
(8)
(8) as well as transmission conditions
(9)
(9) The function u also satisfies radiation conditions (Equation7
(7)
(7) ).
Let us apply the first Green formula to the functions u and
in the bounded domains
and Q. Taking into account the Helmholtz equations, we derive
(10a)
(10a)
(10b)
(10b)
Summing up Equations (Equation10a(10a)
(10a) ) and (Equation10b
(10b)
(10b) ) and using the transmission conditions (Equation9
(9)
(9) ), we obtain
(11)
(11)
Remark 2.2
If belongs to appropriate Sobolev classes [Citation18], the Green formulas can be applied in the entire region P, and the above evaluation can be written in a shorter form.
2. Taking into account conditions (Equation7(7)
(7) ), we get
By virtue of the Rellich lemma (see [Citation2, p.55]) we deduce
in W, which implies that the solution of the problem is trivial outside the inhomogeneity domain P.
3. Let us prove that in P.
Introduce the function
Consider an arbitrary rectangle
such that
). We will use the integral representation of the solution u,
(12)
(12) Let us investigate
in a sufficiently small vicinity U of an arbitrary point
Since the kernels of the integral operators are infinitely differentiable for any
then
Using continuity conditions (Equation3
(3)
(3) ) and representation (Equation12
(12)
(12) ), we obtain
(13)
(13) The function
satisfies equation
in the subdomain
with a coefficient
Hence (see §12 Ch. III in [Citation19]) the inclusion
holds. Since the boundary values of the function
on S are smooth,
then
Thus, the function satisfies the Helmholtz equation
with a piecewise Hölder coefficient in U. Consequently,
in U. By virtue of the unique continuation principle ([Citation14, p.272]) it follows from
in
that
in the entire rectangle
Similar to the above reasoning, we can conclude that
everywhere in P.
2.2. The LSE: smoothness of a solution
Let us derive the boundary value problem (Equation4(4)
(4) )–(Equation7
(7)
(7) ) to a system of IEs. Rewrite the Helmholtz equation in the domains
as follows:
(14)
(14) In the bounded domain
we have
(15)
(15) where
is a circle of sufficiently large radius and
By the second Green formula, we derive
(16)
(16)
(17)
(17) and
(18)
(18) Summing up equalities (Equation16
(16)
(16) )–(Equation18
(18)
(18) ), we deduce
(19)
(19) Passing to the limit as the radius R of the circle S tends to infinity, we obtain from (Equation19
(19)
(19) ) that
(20)
(20) Finally, we have the following system of IEs:
(21)
(21)
(22)
(22)
Definition 2.2
The integral formulation of the direct diffraction problem is the system consisting of Equation (Equation21
(21)
(21) ) in P and representation (Equation22
(22)
(22) ) in
We will also write Equation (Equation21(21)
(21) ) in the operator form
treating
and
as mappings in the
space.
Let us show that and
are equivalent formulations of the direct diffraction problem.
Theorem 2.3
If is a quasiclassical solution of problem (Equation4
(4)
(4) )–(Equation7
(7)
(7) ), then
satisfies equalities (Equation21
(21)
(21) ) and (Equation22
(22)
(22) ). Vice versa, if
is a solution to (Equation21
(21)
(21) ) with the given right-hand side
then the function
extended by (Equation22
(22)
(22) ) to
is a quasiclassical solution to problem (Equation4
(4)
(4) )–(Equation7
(7)
(7) ).
Proof.
1. The former part of the theorem follows from the derivation of IEs (Equation4(4)
(4) )–(Equation7
(7)
(7) ).
2. Let be a solution to Equation (Equation21
(21)
(21) ). Let us first show that the total field
extended outside P by (Equation22
(22)
(22) ) satisfies continuity conditions (Equation3
(3)
(3) ).
Since by definition and the integral operator in representation (Equation22
(22)
(22) ) has the infinitely differentiable kernel, then
Further, we have By virtue of Sobolev space embedding theorems [Citation20], we get
for any
Extracting the singularity of the kernel of the operator
we obtain
where
is a piecewise-continuous and bounded function in P whereas
The latter yields
Further, since
for any
as
then
(23)
(23) where
is an absolutely integrable and bounded function in P. From the latter, it follows [Citation17] that
Thus, which also yields the energy finiteness condition
It suffices to show that for any I. Using (Equation22
(22)
(22) ), we represent u as follows:
(24)
(24) where
It was shown above that
From the definition of the function
it follows that it satisfies the Helmholtz equations
almost everywhere in
Since
then theorem 12.1 [Citation19] yields the necessary inclusion
3. It now follows that u satisfies (in the classical sense) the Helmholtz equation in the domains
as well as outside the inhomogeneity domain,
The total field satisfies the transmission condition by virtue of the inclusion whereas the scattered field
satisfies the radiation conditions.
Since for any we have
then
is a compact operator in
Consequently,
is a Fredholm operator with index zero.
Consider the homogeneous IE
By Theorem 2.3, the field
extended to
is a quasiclassical solution to the problem
This solution is, by virtue of Theorem 2.1, is trivial and, consequently,
is an injective operator. Thus, we arrive at
Theorem 2.4
The operator is continuously invertible.
3. Inverse problem of diffraction
3.1. Statement of the problem
We consider an inhomogeneous rectangle P located in with a given mesh nodes
and a set of rectangular subdomains
defined in Section 2. We assume that P is characterized by an unknown refractive index
which is a piecewise Hölder function in P.
By D we denote a bounded domain such that We assume that the measured values of the total field
(25)
(25) are given in the points
at a fixed frequency ω.
The incident monochromatic wave (the source field) is defined by where
is introduced by (Equation2
(2)
(2) ); the source point
We will use the system of IEs to formulate the inverse diffraction problem. This system is equivalent to the boundary value problem
and represents the relation between the function
and the total field
Definition 3.1
Statement of the inverse problem
Consider a rectangle P. Let be a given set of rectangles,
k=1,2 and
Let
be an unknown piecewise Hölder function that may have discontinuities on
only (see also Remark 2.1). Assume that
satisfies inequality
in P. The inverse problem of diffraction in the integral formulation is to find the function
in the entire inhomogeneity domain P (i.e. in all
) from equation
(26)
(26) using values of the total field
and taking into account equation
(27)
(27)
3.2. TSM for solving the inverse problem
We assume that the condition is satisfied everywhere in P. Introducing the function
in P, we rewrite Equations (Equation22
(22)
(22) ) and (Equation21
(21)
(21) ) as
(28)
(28) and
(29)
(29) The idea of TSM for reconstruction of the unknown function
is as follows:
using the values of the incident wave
and the total field
we explicitly evaluate the function
It can be shown that homogeneous equation (Equation28(28)
(28) ) has non-trivial solutions for any
Indeed, consider the function
in the rectangle
and define
Since ψ satisfies the homogeneous boundary conditions
then
Introduce the potential
Obviously,
in P. However,
at any point
Below we will establish uniqueness of a solution J to the IE of the first kind assuming that J belongs to the class of piecewise constant functions,
(30)
(30) where
are unknown coefficients and
are the indicator functions of subdomains
3.3. Uniqueness of the piecewise constant solution
Let us denote by a given partition of the region P by the rectangles
defined in Section 2.1. We define the class
of piecewise constant functions
where
are some coefficients and
are the characteristic functions of subdomains
Theorem 3.2
Let
(31)
(31)
Then equation
(32)
(32) has at most one solution
Remark 3.1
The equivalent formulation is as follows. Suppose that there exist two piecewise constant solutions and
of Equation (Equation32
(32)
(32) ) with the same right-hand side
Assume that the characteristic functions
are the same for both functions
and
i.e.
are defined on the same partition
Let
and
at
If condition (Equation31
(31)
(31) ) is satisfied, the
for all rectangles
Proof.
It suffices to prove that the homogeneous equation
(33)
(33) has only the trivial solution
in P.
1. Introduce the potential
(34)
(34) Note that
the equation
holds outside
(one has
inside P), and
in the domain
Then, by virtue of the unique continuation principle ([Citation14, p.272]) the function v is equal to zero in
The inclusion
implies that
(35)
(35)
2. Consider the fundamental solution of the Helmholtz equation. Applying the second Green formula (see [Citation18, p.617–618], and Remark 2.2) to the functions
in P, taking into account the homogeneous boundary conditions on
we derive
(36)
(36) The latter implies that
(37)
(37) Subtracting (Equation37
(37)
(37) ) from (Equation34
(34)
(34) ), we obtain
where
Note that the kernel
is an analytic function which satisfies the homogeneous Helmholtz equation. Since the repeated differentiation is valid for
then
Thus, the function
is a classical solution to the Helmholtz equation
and is equal to zero in P. The unique continuation principle implies that
in
3. It follows from the latter that the Fourier transform is also equal to zero everywhere in
Introduce the grid parameters (i=1,2) and define vectors
Then any finite element
in P can be defined via the shift of
by an appropriate vector
The function can be represented as
(38)
(38) Let us evaluate the Fourier transform of the function w taking into account relations (Equation38
(38)
(38) ). Since
(39)
(39) then
(40)
(40) Thus, the relation
is reduced to the equality
(41)
(41) on the circle
of radius
4. Let us prove that the functions are linearly independent on
To this end, we will establish non-singularity of the corresponding Gram matrix Γ.
Any element of the Gram matrix can be represented in the following way:
(42)
(42)
Note that the last integral in (Equation42(42)
(42) ) does not depend on
Then, applying formula (see [Citation21, p.214])
(43)
(43) with n=2 and
we finally derive
(44)
(44)
Applying formula 3.753.1 from [Citation22], we obtain
Thus, we get
(45)
(45)
5. Represent the Gram matrix as follows:
where
is the unit matrix. We will show that estimate (Equation31
(31)
(31) ) yields
so that the determinant of the matrix Γ is non-zero.
Let us fix the row number and define
We obtain
(46)
(46) if condition (Equation31
(31)
(31) ) is satisfied. The proof is complete.
By virtue of Theorem 3.2 and relation (Equation29(29)
(29) ), the solution
to the inverse problem is unique.
Remark 3.2
on the existence of a solution
Let the right-hand side of (Equation32(32)
(32) ) belong to the linear span of functions
(for a given mesh on P). Then
can be treated as an operator in finite-dimensional spaces. By theorem 2.4 this operator is continuously invertible. Thus, there exists a unique solution of the inverse problem which depends continuously on near field data (on the measured values of the total field).
4. Numerical simulation
We consider a model problem with an inhomogeneous rectangular scatterer P whose contrast function is everywhere non-zero, i.e. the function is not equal to the wavenumber
of the obstacle-free space.
We obtain the solution of the model problem in the following way. First, we consider the square scatterer P and define the mesh of nodes and a set
of rectangle subdomains of the region P. In the entire region P we define a function
which represents the exact solution to the inverse problem and satisfies the condition
in P. We consider a piecewise Hölder function which is continuous in each element
of the a priori defined mesh and has jumps on several sides
Given the function we find a unique solution
to the direct scattering problem. This solution is then used to simulate the total field
in the inverse problem of diffraction according to (Equation22
(22)
(22) ).
For the given incident wave and the simulated total field, we obtain the solution J of Equation (Equation28
(28)
(28) ). Finally, the approximate solution
of the inverse problem is calculated explicitly by formula (Equation29
(29)
(29) ). Thus, using the TSM, we reconstruct the function
in the entire domain P.
To solve IE (Equation28(28)
(28) ), we use the collocation method
(47)
(47) choosing the collocation points
in domain D, where the total field is given. Approximations to
are sought in the form (Equation30
(30)
(30) ). If the originally introduced grid
doesn't provide sufficient accuracy of a solution, we can define a more fine grid by splitting the rectangles
into a finite number of new rectangles
Note that in our method the number of equations coincides with the number of unknown coefficients We apply the central rectangles quadrature formula to calculate the integrals of the left-hand side of Equation (Equation47
(47)
(47) ). Since we integrate over subdomains
of P, the points
and, by assumption,
then the kernel G is infinitely differentiable. Consequently, the rectangle method provides sufficient accuracy even with a small number of subdivisions. In the carried out experiments, we applied the midpoint rule taking from 16 to 40 terms in the quadrature.
Since we use the collocation method and don't involve any iterative procedures for finding approximate solutions, the TSM turns out to be a relatively fast method. We used a PC with the CoreI5–2500 processor with the clock speed 3.37 GHz. The code was compiled using full 64 bit optimization. The entire solution procedure took less than 5 min. The RAM required for solving the problem depends primarily on the number of unknown complex coefficients and can be approximately estimated as
where the last factor depends on the definition of the complex numbers. According to our implementation of the algorithm, the required RAM varies from 0.5 to 1.5 GB. Thus, TSM is quite an efficient numerical technique which doesn't require supercomputing or distributed computing.
Below, we represent the comparison of the exact solution of the inverse problem and the approximate ones.
We consider the problem of diffraction by a square i.e. with a side of 15 cm. The incident wave is field (Equation2
(2)
(2) ) of the point source located at the point
the wave frequency
MHz.
The real and the imaginary parts of the exact solution of this model problem are shown in Figure , whereas Figure represents the approximate solution obtained using the TSM.
To show dependence of the solution accuracy on the amount of noise in the given data (the given values of the field in the right-hand side of the equation), we carried out a series of experiments. The idea of the data noising test is as follows. We first solve the direct scattering problem with “pure” data. Then we calculate the near field according to definition by formula (Equation22(22)
(22) ) adding random noise to the previously found solution
of the direct problem. So we obtain a good simulation of perturbed near field data
of the inverse problem.
Figure represents the approximate solution of the inverse problem with a noisy scattered field (the scatterer is the same as in Figure ). In this experiment, the true inhomogeneities (marked by *) are well-distinguished despite the noisy background and some artefacts (marked by +). The last ones are in fact comparatively large disturbances of the background.
Figure demonstrates the real part of the approximate solutions (henceforward we consider another kind of inhomogeneity) corresponding to noisy data in the region D with various noise level ranging from to
with respect to the amplitude of the noiseless field.
We propose a method for excluding the artefacts and more accurate detection of true inhomogeneities which consists of two steps: a preprocessing procedure (filtering of the noisy data) and a postprocessing procedure (refinement of obtained approximate solutions).
At the first step, we filter the given near field data which is then used in the collocation method. We take a collocation node and consider it's small vicinity
with diameter
where δ is the minimal distance from
to other collocation points. We calculate the average value
in
using (Equation22
(22)
(22) ) and make a comparison between
and the given value
If
is not within 5% of the value
then we set
in the collocation method. Otherwise, the given value
is used.
During the postprocessing procedure, we first make a series of two experiments (see Figure ) considering two variants of placing the source point (shown by the single dot) and the receivers (the collocation points shown by the double rows of dots): the original placing is shown in Figure (a), while Figure (b) represents rotation of the original structure by counter-clockwise. Then we consider two approximate solutions
and
at the points of subdomains
Note that the true homogeneities are at the same positions in both pictures, whereas most of the artefacts changed their location or even disappeared. Further analysis is quite simple: if the difference between these values is less than 5% of the average
and is within 10% of the background values, then we say that
represents the wavenumber of the background. Otherwise we set
and call it the wavenumber of the sought-for inhomogeneity. In fact, it may be not a true inhomogeneity but an artefact.
Finally, we make levelling of the background in those grid cells that are marked as background subdomains. To this end, we consider all background cells
and first replace the values of
for all
by the average values
Then we consider all background cells again in a given order to compare the values
If
then we set
otherwise, the value
remains unchanged.
Figure demonstrates the real part of the refined approximate solutions according to the above described pre- and postprocessing procedures.
Conclusion
We have proposed and theoretically justified the two-step numerical method for solving the two-dimensional problem of reconstructing a piecewise Hölder refractive index of an inhomogeneous scatterer P using near field data. The index is described by a piecewise-continuous function that may have discontinuities on sides of rectangles which represent an a priori given rectangular partition of P. The proposed method is a non-iterative technique which involves solving a linear IE of the first kind in the inhomogeneity domain with consequent evaluation of the sought-for refractive index by an explicit formula. Uniqueness of a solution to the IE is proven in the class of piecewise constant functions. We also have proposed and implemented an efficient two-stage algorithm for refining approximate solutions of the problem. The method consists of noise filtering (the preprocessing) and the refinement itself (the postprocessing), and provides high accuracy of solutions if the noise level doesn't exceed 5%.
Disclosure statement
No potential conflict of interest was reported by the authors.
ORCID
M. Yu. Medvedik http://orcid.org/0000-0003-4066-1818
Yu. G. Smirnov http://orcid.org/0000-0001-9040-628X
A. A. Tsupak http://orcid.org/0000-0002-4462-4697
Additional information
Funding
References
- Colton DL, Kress R. Integral equation methods in scattering theory. New York (NY): Wiley; 1983.
- Cakoni F, Colton D. Qualitative methods in inverse scattering theory. Berlin: Springer-Verlag; 2006.
- Moiseev T, Cameron DC. A three-step algorithm for solving 2d inverse magnetostatic problems for magnetron design applications. Inverse Probl Sci Eng. 2005;13(3):279–297. doi: 10.1080/17415970500044000
- Olson LG, Throne RD. An inverse problem approach to stiffness mapping for early detection of breast cancer. Inverse Probl Sci Eng. 2013;21(2):314–338. doi: 10.1080/17415977.2012.700710
- Hamdi A. A non-iterative method for identifying multiple unknown time-dependent sources compactly supported occurring in a 2d parabolic equation. Inverse Probl Sci Eng. 2018;26(5):744–772. doi: 10.1080/17415977.2017.1347648
- Bakushinsky AB, Kokurin MY. Iterative methods for approximate solution of inverse problems. New York (NY): Springer; 2004.
- Beilina L, Klibanov M. Approximate global convergence and adaptivity for coefficient inverse problems. New York (NY): Springer; 2012.
- Klibanov M, Kolesov A, Nguyen L, et al. Globally strictly convex cost functional for a 1-d inverse medium scattering problem with experimental data. SIAM J Appl Math. 2017;77(5):1733–1755. doi: 10.1137/17M1122487
- Klibanov MV, Kolesov AE, Nguyen D-L. Convexification method for a coefficient inverse problem and its performance for experimental backscatter data for buried targets. 2018; https://arxiv.org/pdf/1805.07618v1.
- Klibanov MV, Li J, Zhang W. Convexification of electrical impedance tomography with restricted Dirichlet-to-Neumann map data. Inverse Probl. 2019;35(3):035005. doi: 10.1088/1361-6420/aafecd
- Medvedik MY, Smirnov YG, Tsupak AA. Two-step method for solving inverse problem of diffraction by an inhomogeneous body. In: Beilina L, Smirnov YG, editors. Nonlinear and inverse problems in electromagnetics. Cham: Springer International Publishing; 2018. p. 83–92. (Springer Proceedings in Mathematics & Statistics; vol. 243).
- Medvedik MY, Smirnov YG, Tsupak AA, Inverse problem of diffraction by an inhomogeneous solid with a piecewise holder refractive index. 2018; http://arxiv.org/submit/2193011/pdf.
- Smirnov Y, Tsupak AA. Method of integral equations in a scalar diffraction problem on a partially screened inhomogeneous body. Differ Equ. 2015;51(9):1225–1235. doi: 10.1134/S0012266115090128
- Colton D, Kress R. Inverse acoustic and electromagnetic scattering theory, third edition. Berlin: Springer-Verlag; 2013.
- Abubakar A, Habashy TM, vandenBerg PM. et al. The diagonalized contrast source approach: an inversion method beyond the born approximation. Inverse Probl. 2005;21:685.702 doi: 10.1088/0266-5611/21/2/015
- Zakaria A, Gilmore C, LoVetri J. Finite-element contrast source inversion method for microwave imaging. Inverse Probl. 2010;26:115010. doi: 10.1088/0266-5611/26/11/115010
- Vladimirov VS. Equations of mathematical physics. New York (NY): Marcel Dekker; 1971.
- Costabel M. Boundary integral operators on Lipschitz domains: elementary results. SIAM J Math Anal. 1988;19:613–626. doi: 10.1137/0519043
- Ladyzhenskaya OA, Ural'tseva NN. Linear and quasilinear elliptic equations. New York (NY): Academic Press; 1968.
- Adams RA. Fournier JJF: Sobolev spaces. Amsterdam: Academic Press; 2003.
- Natterer F. The mathematics of computerized tomography. Stuttgart: Wiley and BG Teubner; 1986.
- Gradshteyn IS, Ryzhik IM. Table of integrals, series, and products. New York (NY): Academic Press; 1965.