
 ?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.
?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.Abstract
The scalar problem of reconstruction of an unknown refractive index of an inhomogeneous solid is considered. The original boundary value problem for the Helmholtz equation with an unknown refractive index is reduced to the source-type integral equation. The solution to the inverse problem is obtained in two steps. First, the integral equation of the first kind is solved in the inhomogeneity domain using measurements of the total field outside the domain. The uniqueness of a solution to the integral equation of the first kind is proved in a special class of functions. Second, the sought-for refractive index is explicitly expressed via the found solution and the total field. The two-step method was verified by solving a test problem with a given refractive index. Procedures for refining approximate solutions were proposed and implemented. Efficiency of the proposed method was approved by comparison between the exact solution and the approximate ones.
1. Introduction
The paper deals with a non-iterative two-step method (TSM) for solving the scalar inverse problem of diffraction by an inhomogeneous solid located in the unbounded homogeneous space
The importance of the considered problem is due to a wide range of applications such as microwave tomography or reconstruction of characteristics of composite materials.
Among theoretical works dedicated to theoretical investigation of existence and uniqueness of solutions to inverse problems, we only mention [Citation1] which contains an extensive and up-to-date bibliography on the subject.
Common numerical methods for studying inverse problems are based on solving hyperbolic systems of differential equations in the time domain using finite difference or finite element methods, with subsequent minimization of the corresponding functionals and Tikhonov regularization [Citation2–10].
There have recently appeared several works in which novel iterative globally convergent algorithms were proposed. The approaches presented in [Citation11, Citation12] are based on the construction of weighted globally strictly convex cost functionals. Eliminating the phenomenon of multiple local minima of cost functionals provides the global convergence to the correct solution of the gradient projection method.
The volume singular integral equation method is an alternative approach to solving the inverse problems of electrodynamics and acoustics (see e.g. [Citation7, Citation13–20]).
In this paper, we use the integral equation which is well-known as the ‘source-type integral equation’ (STIE). Common techniques for numerical solving STIE involve minimization of special error functionals (see, e.g. [Citation13, Citation20]) and require a good initial approximation to avoid local minima of the cost functionals. The idea of TSM is in direct numerical solving the linear source-type integral equation with subsequent explicit evaluation of the sought-for contrast function.
The article consists of four sections.
In Section 2, we rigorously formulate the forward problem of diffraction and give main theoretical results of its investigation. Note that some results are similar to the ones described in [Citation15]. The major difference from [Citation15] is that we consider the quasiclassical setting of the boundary value problem (BVP) for the Helmholtz equation, assuming that a solution should satisfy additional smoothness conditions. Then, we write the integral Lippmann–Schwinger equation (LSIE) with respect to the unknown total field in the inhomogeneity region Q. The operator of the equation is well studied [Citation15] and is known to be a Fredholm operator of index zero. Further, we show that any solution
to LSIE with a smooth right-hand side represents in fact a quasiclassical solution to the original BVP. Thus, we obtain that the BVP for the Helmholtz equation is equivalent to the system of integral equations used for recovering the refractive index in Section 3 of the article.
Section 3 describes theoretical investigation of the inverse scattering problem. We assume that the incident wave is the field of a point source located outside , whereas the sought-for refractive index
is assumed to be a continuous or piecewise Hölder function in Q such that
. Here
is the given wave number of the free space
To find the function
we consider STIE under assumption that the near field data is determined in some bounded domain D such that
, whereas the source point
is outside
.
In Section 3.2, we describe TSM. The first step is in direct solving the STIE. Note that we introduce the current in the inhomogeneity domain Q and then solve STIE with respect to J using the near field data given in D. The second step of TSM involves direct calculation of the sought-for solution
via the given functions
,
and
using the LSIE in the domain Q.
Solving STIE, one faces the well-known problem of non-uniqueness of a solution to STIE. In Section 3.2, we give an example of a smooth non-trivial solution to the homogeneous STIE. However, unique solvability is then proved in special function classes. In [Citation21], we introduced the class of piecewise-constant functions with rectangular support. In the present work, we describe much wider classes of solutions which can be represented by linear combinations of compactly supported basis functions.
The main theoretical result presented in Section 3.3 is the theorem on uniqueness of a solution to the STIE that was first announced in [Citation22]. As in [Citation21, Citation23], we prove that, for almost all values of the wave number the STIE has at most one solution in the introduced classes of functions.
In Section 4, we describe conditions of numerical tests, show in several figures the obtained approximate solutions, and explain the algorithm of solutions' refinement. It is clear that in a realistic experiment, one cannot use some ‘pure’ field data which can be analytically modelled. That is why we simulate noisy near filed data which results in disturbing a solution, as well as appearing of false inhomogeneities and loss of the true ones. We propose several techniques for obtaining accurate solutions: extraneous noise screening out (filtering the input near filed data), analysis of disturbed solutions obtained for various wave frequencies with the further construction of an accurate approximate solution, and final postprocessing (levelling of the sought-for function).
The last section of the paper contains proofs of the theorems.
2. Forward scattering problem: statement and main results
We consider a bounded solid Q located in the isotropic homogeneous space . The lossless homogeneous medium
is characterized by a given wave number
The inhomogeneity domain Q is filled with isotropic inhomogeneous medium. We assume that Q can be represented by a union of several subdomains (
),
and
is a piecewise smooth boundary that consists of a finite number of surfaces of the class
.
We consider inhomogeneities of the domain Q of two types. Inhomogeneities of the first type are presented by continuous functions whereas inhomogeneities of the second type are described by piecewise-continuous functions
In the latter case, we set
(1)
(1) where
are arbitrary Hölder continuous functions. At the points of the boundaries
, the function
can be defined via the one-sided limit from any side of the surface.
Introducing the set of characteristic functions
(2)
(2) we can define the function
at any point
by the equality
(3)
(3)
We define as the union of all edges of the solids
and introduce the following notation:
(4)
(4)
We use the representation of the total field via the sum
of the incident wave
and the scattered field
All fields depend on time harmonically:
and
.
The function
(5)
(5) describes the incident field of a point source that satisfies the Helmholtz equation
and the Sommerfeld radiation condition.
Definition 2.1
The forward scattering problem in the rigorous mathematical statement is to find a solution to the following boundary value problem:
(6)
(6) Here
denotes the jump of the function u, i.e. the difference of traces of u on
from the inside and the outside of the domain
.
Definition 2.2
Any solution to the problem that satisfies the conditions
(7)
(7) is a quasiclassical solution to the forward scattering problem.
Remark 2.1
Note that a solution to problem should be understood in the distributional sense due to the choice of the incident field and the equation considered in
Nevertheless, we formulate the Helmholtz equation in
and the Sommerfeld radiation condition in the classical sense assuming that any solution to
is in fact a smooth function at any point
The problem can be reduced [Citation15] to the following system of integral equations:
(8)
(8)
(9)
(9)
Definition 2.3
The integral statement of the forward diffraction problem is understood as the system consisting of equation (Equation8
(8)
(8) ) in the domain Q and representation (Equation9
(9)
(9) ) in
.
The operator in (Equation8(8)
(8) ) denoted by
is treated as a mapping in the
space.
First, it can be shown that any solution of the problem
satisfies the smoothness conditions formulated in the quasiclassical statement of the problem.
Theorem 2.4
Let (Equation8(8)
(8) ) have a solution
Then, the total field
extended outside Q by (Equation9
(9)
(9) ) satisfies smoothness conditions (Equation7
(7)
(7) ).
The next two theorems are on the equivalency between two formulations of the forward scattering problem, and on uniqueness of the quasiclassical solution to .
Theorem 2.5
The problems and
are equivalent. More precisely, if
is a quasiclassical solution to the problem
then u satisfies (Equation8
(8)
(8) ) and (Equation9
(9)
(9) ). Vise versa, if
is a solution to the IE (Equation8
(8)
(8) ), then the total field
extended to
by (Equation9
(9)
(9) ) is a quasiclassical solution to the problem
.
Theorem 2.6
For any the problem
has at most one quasiclassical solution.
The proof of Theorem 2.6 can be found in [Citation24, Citation25].
From Theorems 2.5 and 2.6, it follows that is an invertible operator. For any
we have
which implies that
is a compact operator in
Let
in
Then the boundary value problem
has only the trivial solution (see Theorem 2.6). By virtue of the equivalency between
and
u = 0 is the only solution to the IE
. Hence,
is an injective Fredholm operator with index zero. Thus, we arrive at
Theorem 2.7
The operator is continuously invertible.
Thus, summarizing Theorems 2.4–2.7, we derive that the forward diffraction problem has a unique quasiclassical solution.
3. Refractive index reconstruction
3.1. Statement of the inverse problem
Consider an inhomogeneous solid
(10)
(10) and assume that Q is characterized by an unknown refractive index
which can be a continuous function in
or a piecewise-continuous function. In the latter case,
is assumed to be a piecewise Hölder function in Q such that
where
.
Introduce a bounded domain D, . The values of the total field
(11)
(11) are given at the points
at a frequency ω.
The incident wave is
(12)
(12) where
is an arbitrary source point such that
In the proposed statement of the inverse diffraction problem, we use the system of integral equalities which represent the relation between the total field
and the function
It is shown above that problems
and
are equivalent.
Definition 3.1
Statement of the inverse problem
Let
be an unknown continuous (or piecewise Hölder) function. Assume that inequality
(13)
(13) holds in
. The inverse problem of diffraction in the integral formulation is to find the function
in the entire domain Q from equation
(14)
(14) using given values of the total field
and taking into account the equation (Equation8
(8)
(8) ).
(15)
(15)
Remark 3.1
Inequality (Equation13(13)
(13) ) should not be treated as a restriction on considered domains. It merely describes the scatterer's refractive index that differs from the index of the free space which is a standard condition in acoustics and electrodynamics.
3.2. Formulation of TSM for solving the inverse problem
We introduce the function in the region Q and rewrite Equations (Equation14
(14)
(14) ) and (Equation15
(15)
(15) ) as follows
(16)
(16)
(17)
(17)
The proposed non-iterative TSM for reconstructing the unknown function consists of two steps:
using the given values of the incident wave
and the total field
we evaluate the function
It can be shown that the IE (Equation16(16)
(16) ) has multiple solutions which follows from the proposition below.
Proposition 3.2
For any , there exist non-trivial solutions to the homogeneous integral equation
.
Proof.
Consider an arbitrary domain Q and a smooth function that satisfies the homogeneous boundary conditions (closed-form expressions of ψ can easily be given in cases of elementary shapes, i.e. parallelepipeds, balls, etc. [Citation21]). Define
. By virtue of the boundary conditions for ψ one gets the representation
Introduce the potential
Then at any point
one obtains
However, the relation
holds outside the closed cube
3.3. Uniqueness of a solution in a special function class
Introduce the mesh of nodes
(18)
(18) and the set of subdomains
(19)
(19) where l denotes the multi-index
.
Definition 3.3
Let where
. Then
(20)
(20) is a given partition of the region Q by the parallelepipeds
which satisfy the condition
(21)
(21)
Below we will define the classes of the sought-for solutions to Equation (Equation16
(16)
(16) ). Let Q be a bounded region with a given partition
Let
be a set of functions such that
the function
Here is a standard measure on a sphere
of radius
centred at the origin, and
is the Fourier transform of the function ψ.
Definition 3.4
The class is a set of finite linear combinations
(22)
(22) where
are some coefficients, and
satisfy the above written conditions. By
, we denote the image of
under the action of the operator
.
Remark 3.2
(1) Note that in general we do not assume that , i.e. we do not reconstruct the inhomogeneity of the solid on an a priory given set of subdomains. (2) The supports of the functions
may in fact differ from the parallelepipeds
Thus, one can consider not only piecewise constants but a much wider approximating classes of functions (see Figure ).
Figure 1. Plots of various approximating functions in Q (the variable
is fixed).

Theorem 3.5
Let
(23)
(23) Then equation
(24)
(24) has at most one solution
In addition, Equation (Equation24
(24)
(24) ) has at most one solution
for every
and for any wave number
with the possible exception of finite number of its values.
Let us assume that the right-hand side of (Equation24
(24)
(24) ) belongs to the class
Then the operator of the left hand side of (Equation24
(24)
(24) ) can be treated as a mapping in finite-dimensional spaces. It results from Theorem 3.5 that such a mapping is continuously invertible. Thus, we arrive at
Theorem 3.6
If condition (Equation23(23)
(23) ) is satisfied, then for any
there exists a unique solution of Equation (Equation24
(24)
(24) ).
4. Numerical simulation
To illustrate the proposed method, we numerically study a series of test inverse problems assuming that Q is an inhomogeneous parallelepiped whose contrast function is everywhere non-zero. More precisely, condition (Equation13(13)
(13) ) is always satisfied.
The approach for solving a test problem is as follows. First, we consider the cube Q with a function
which represents the exact solution to the inverse problem. Second, for the given function
we find a unique solution
of the forward scattering problem which is then used for determining the simulated total field
of the inverse scattering problem (see relation (Equation9
(9)
(9) )).
Given the incident wave and the simulated total field u in D, we find a solution J to (Equation16
(16)
(16) ). In the present work, we consider the classes
of piecewise-constant functions
. Here
are the characteristic functions of the balls
of radius
centred at points
The radius
is fixed for any given partition and the points
are chosen as to satisfy conditions (1)–(4) on page 15. Actually, we define
as the centres of the rectangles
defined by (Equation18
(18)
(18) ),(Equation19
(19)
(19) ). Finally, using formula (Equation17
(17)
(17) ), we recover the sought-for function
.
We use collocation method for approximate solving equation (Equation16(16)
(16) ). To this end, we define sets of collocation nodes
in the domain D, where the total field is given. Approximate solutions are sought in the form (Equation22
(22)
(22) ) with the characteristic functions
To obtain a unique approximate solution we require that the number of equations be equal to the number N of unknown coefficients
This implies that the number of collocation points representing the receivers' positions (or points of the field measuring) should be equal to N. We use the central rectangles rule for calculating the integrals of the left hand side of (Equation24
(24)
(24) ). Since the integration domains are
the points
and
then the kernel G is smooth. Consequently, the rectangle rule provides sufficient accuracy. In practice, we apply the midpoint rule with at most
terms in the quadrature.
Application of the collocation method and non-iterative procedures for finding solutions makes the TSM a relatively fast method which doesn't require supercomputing or distributed computing. In the carried out experiments which took from 1 to 18 min, a PC with the CoreI5–8300h processor with the clock speed 3.9 GHz was used. The random-access memory (RAM) requirements depend primarily on the number of the sought-for coefficients In the tested implementation of the algorithm, the required RAM varied from 0.15 to 1.5 GB.
Below, we discuss results of numerical solving the inverse problem as well as the comparison of the exact solution of the inverse problem and the approximate ones.
We take the cube with a side of 15 cm. The incident wave is defined by (Equation5
(5)
(5) ), where the source is located at the point
the wave frequency varies within the range of 25–27 GHz. We consider the domain
where
and
are located on the opposite sides of Q:
and
The mesh sizes in Q and D vary from 0.5 to 1.5 cm depending on n (see formulas (Equation18
(18)
(18) ) and (Equation19
(19)
(19) )).
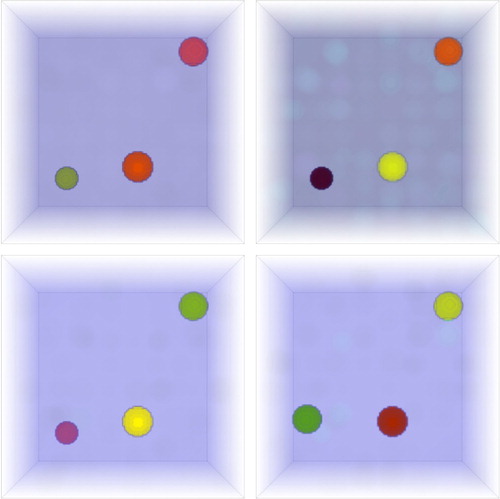
In this work, we consider the case of three ball-shaped inclusions: the inhomogeneity of the solid is described by a piecewise-continuous complex-valued function which is equal to 20 + 10i except for three spherical subdomains, where
varies from 33 to 38 and
is chosen within the segment
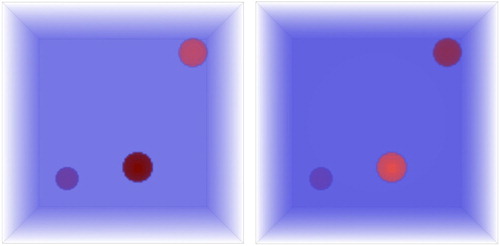
Figure shows the real and the imaginary parts of the exact solution to the test problem.
Figure 2. The real (left) and the imaginary (right) parts of the exact solution of the model inverse problem with noiseless data: The wave frequency is 27 GHz.
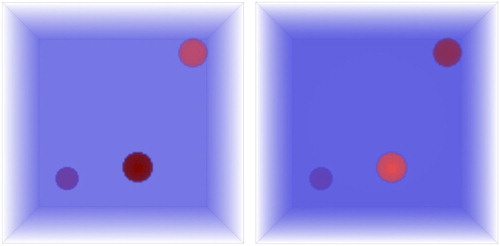
The next set of figures is presented for understanding the dependance of approximate solutions' accuracy on the amount of noise in the data. Note that, given pure simulated data (undisturbed field u in the domain D), we obtain very accurate solutions which can hardly be distinguished from the exact ones (see Figure ).
We simulate noising of the data in the following way: we first solve the forward problem with ‘pure’ data; then we evaluate the field in the region D by formula (Equation9(9)
(9) ) adding random noise to the density
of the volume potential. More precisely, we set
where the
Here
returns a random real from the interval
and ν is the noise level. So, if
we say that the data is noisy with the noise level
Thus, a good simulation of perturbed near field data
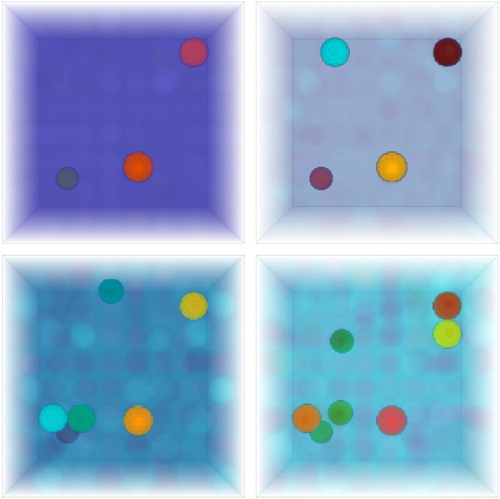
is obtained. Figure demonstrates approximate solutions of the inverse problem with disturbed data showing noisy background and numerous artefacts. The noise level denoted by
ranges from
to
with respect to the amplitude of the noiseless field.
Figure 3. The real (left) and the imaginary (right) parts of the approximate solution of the model inverse problem with noiseless data: The wave frequency is 27 GHz.
We use the same method for erasing artefacts and more accurate detection of true inhomogeneities as in [Citation21]. The method is in two procedures.
Figure 4. The real part of approximate solution of the model inverse problem with noisy near field data. The values of the noise level are ,
,
, and
. The wave frequency is 27 GHz.
The first preprocessing procedure is used for filtering noisy near field data in the domain D. We take a collocation node and consider its small vicinity
with diameter
where δ is the minimal distance from
to other collocation points. We calculate the average value
in
using (Equation9
(9)
(9) ) and make a comparison between
and the given value
If
is not within 5% of the value
then we set
in the collocation method. Otherwise, the given value
is used. The same averaging procedure can also be applied to experimentally obtained data.
The second is the postprocessing procedure (refinement of approximate solutions). We make a series of several experiments and find approximate solutions at three various frequencies (see Figure ).
Then we compare the approximate solutions
and
at the points of subdomains
assuming that the true homogeneities are at the same positions of the inhomogeneity domain, and the artefacts change their location or even disappear. The solution
corresponding to the original value of the wave frequency is the one to be refined, whereas
and
are supplementary solutions. The further analysis is as follows: if the difference between these values is less than 5% of the average
and is within 10% of the background values then we say that
represents the wave number of the background. Otherwise we set
and call it the wave number of the sought-for inhomogeneity. In addition, a background levelling can be carried out in those grid cells
that are treated as background subdomains. This procedure is a kind of averaging the values at background cells (a detailed description is given in [Citation21]). The result of solution's refinement is presented in Figure .
Figure 5. Approximate solutions of the model inverse problem with noisy near field data obtained at three wave frequencies: 25, 26 and 27 GHz. The noise level is .

Figure demonstrates the real part of the approximate solutions refined by the pre- and postprocessing procedures.
Figure 6. The refined approximate solution of the model problem with noisy near field data with
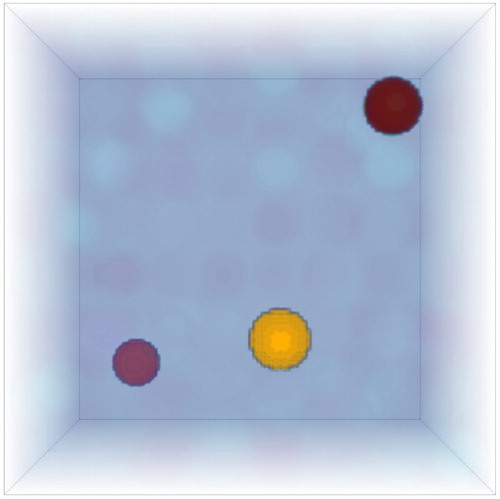
Figure 7. The real part of refined approximate solutions of the model inverse problem with noisy near field data. The values of the noise level are ,
,
, and
Thus, the experiments show high efficiency of the described methods if the noise level is less than 0.5% of the pure data.
5. Proofs of the theorems
Proof of Theorem 2.4.
Proof of Theorem 2.4
From the definition of the incident wave in the considered statement of the problem it follows that .
The extension of a solution to the integral equation is infinitely differentiable outside the solid since the smoothness of the integral operator kernel at each
.
Now we consider equation (Equation8(8)
(8) ). For each index l, we have
(25)
(25)
The right-hand side of the equation is infinitely smooth in the open domain
since, for any
we have
.
The inclusion implies
and, consequently,
for all
Then
[Citation26]. It follows from the latter that
which also results in the energy finiteness condition
.
It suffices to prove that for any l. Write the following equality for u according to (Equation25
(25)
(25) ):
where
.
Let be an arbitrary inner point of the lth sub-domain such that
Introduce the cut-off function
(26)
(26) We represent v in the form
(27)
(27) Since the kernel in the second term is smooth, we obtain
.
Note that
and, consequently,
(28)
(28)
Using the properties of the volume potential (for details, see [Citation15]), we obtain from the latter that .
Thus, a solution is twice differentiable in a vicinity of each point
i.e.
.
Proof of Theorem 2.5.
Proof of Theorem 2.5
(1) The former part of the theorem follows from the derivation of the integral equation (Equation8(8)
(8) ).
(2) Let u be a solution to (Equation8(8)
(8) ) with
. The definition of u in terms of a volume potential together with smoothness of the term
in
imply that u is a solution to the Helmholtz equation in the domains
and
.
The scattered field satisfies the radiation condition, whereas the transmission conditions are fulfilled since the inclusion
shown in Theorem 2.4. Note that the equality
cannot be formulated on the edges of the sub-domains
.
Proof of Theorem 3.5.
Proof of Theorem 3.5
(1) Consider the homogeneous equation
Introduce the volume potential
(29)
(29)
Since is a continuous (or piecewise continuous and bounded) function, then
As a result, the transmission conditions
hold on the boundaries of
Moreover, the inclusions are valid. Consequently, the Helmholtz equation
holds at the inner points
(in the classical sense).
Outside we obtain
and
By the assumption of the theorem, the function v is equal to zero in the domain . Then, applying the unique continuation principle [Citation15], we derive that
everywhere in
.
It follows from the inclusion that the relation
(30)
(30) holds.
(2) Consider the fundamental solution of the Helmholtz equation. Applying the second Green formula to the functions v and
in the domains
taking into account the homogeneous boundary conditions (Equation30
(30)
(30) ) and the transmission conditions on
for the function v, we find
It follows from the latter that
(31)
(31)
Subtracting (Equation31(31)
(31) ) from (Equation29
(29)
(29) ), we deduce
Note that the kernel is an analytic function which satisfies the homogeneous Helmholtz equation. Since the repeated differentiation is valid for
then
Thus, the function
is a classical solution to the Helmholtz equation in
and is equal to zero in Q. The unique continuation principle implies that
in
.
(3) Thus, in
. Then everywhere in
the Fourier transform
identically equals zero. Since
for all
, then the function
can now be represented as follows
Evaluating the Fourier transform of w and taking into account the latter relation, we find
The properties of the functions (see page 8) imply that the relation
can be reduced to the equality
on the centred sphere
of the radius
.
(4) Let us show that the functions are linearly independent on the sphere
To this end we will prove that the corresponding Gram matrix Γ is nonsingular.
We denote a unit sphere in (
) by
For an arbitrary matrix element
we deduce
(32)
(32)
In the above evaluation, the integrals
over the unit centred sphere
do not depend on the variable
and, consequently, can be presented [Citation27] as below:
From (Equation32
(32)
(32) ) it follows that
(5) Represent Γ via sum
where
is the unit matrix, and obtain the estimate
(33)
(33)
Fix the row index and define
:
The estimate (Equation33(33)
(33) ) implies that the determinant of the Gram matrix is non-zero, since its diagonal element dominate at sufficiently large n.
Note that the determinant of the Gram matrix depends analytically on
(in terms of functions of a complex variable) for arbitrary
Hence,
can have a finite number of zeros within any bounded segment
Thus, Equation (Equation24
(24)
(24) ) has a unique solution from the class
for every
and for any wave number
with the possible exception of finite number of its values.
The proof is complete.
Conclusion
We have theoretically justified and implemented the two-step method for solving the three-dimensional problem of recovering a refractive index of a volumetric scatterer Q using noisy near field data. The index can be described by a continuous or piecewise Hölder function that may have discontinuities on boundaries of several subdomains
of Q. The proposed non-iterative method involves solving a linear source-type integral equation. We proved uniqueness of a solution to such an equation in the class of linear combinations of functions with compact supports
. An efficient two-stage refinement procedure is proposed and implemented. The procedure allows to obtain solutions to the problem with noisy near field data, where the noise level is within
.
Disclosure statement
No potential conflict of interest was reported by the author(s).
ORCID
M. Yu. Medvedik http://orcid.org/0000-0003-4066-1818
Yu. G. Smirnov http://orcid.org/0000-0001-9040-628X
A. A. Tsupak http://orcid.org/0000-0002-4462-4697
Additional information
Funding
References
- Brown BM, Marlett M, Reyes JM. Uniqueness for an inverse problem in electromagnetism with partial data. J Differ Equations. 2016;260:6525–6547. doi: 10.1016/j.jde.2016.01.002
- Ammari H, Kang H. Reconstruction of small inhomogeneities from boundary measurements. New York (NY): Springer-Verlag; 2004. (Lecture notes in mathematics; vol. 1846).
- Bakushinsky AB, Kokurin MY. Iterative methods for approximate solution of inverse problems. New York (NY): Springer; 2004.
- Beilina L, Klibanov M. Approximate global convergence and adaptivity for coefficient inverse problems. New York (NY): Springer; 2012.
- Isakov H. Inverse problems for partial differential equations. New York (NY): Springer; 2005.
- Kabanikhin SI, Satybaev AD, Shishlenin MA. Direct methods of solving multidimensional inverse hyperbolic problems. Utrecht: VSP; 2004.
- Kirsch A. An introduction to the mathematical theory of inverse problems. New York (NY): Springer; 2011.
- Romanov VG. Inverse problems of mathematical physics. Utrecht: VNU; 1986.
- Karchevsky AL, Dedok VA. Reconstruction of permittivity from the modulus of a scattered electric field. J Appl Ind Math. 2018;12(3):470–478. doi: 10.1134/S1990478918030079
- Dedok VA, Karchevsky AL, Romanov VG. A numerical method of determining permittivity from the modulus of the electric intensity vector of an electromagnetic field. J Appl Ind Math. 2019;13(3):436–446. doi: 10.1134/S1990478919030050
- Klibanov MV, Kolesov AE, Nguyen L, et al. Globally strictly convex cost functional for a 1-D inverse medium scattering problem with experimental data. SIAM J Appl Math. 2017;77(5):1733–1755. doi: 10.1137/17M1122487
- Klibanov MV, Li J, Zhang W. Convexification of electrical impedance tomography with restricted Dirichlet-to-Neumann map data. Inverse Probl. 2019;35(3):035005. doi: 10.1088/1361-6420/aafecd
- Abubakar A, Habashy TM, Van den Berg PM, et al. The diagonalized contrast source approach: an inversion method beyond the Born approximation. Inverse Probl. 2005;21:685. doi: 10.1088/0266-5611/21/2/015
- Van den Berg PM, Abubakar A. Inverse scattering algorithms based on contrast source integral representations. Inverse Probl Eng. 2002;10(6):559–576. doi: 10.1080/1068276031000086787
- Colton D, Kress R. Inverse acoustic and electromagnetic scattering theory. 3rd ed. Berlin: Springer-Verlag; 2013.
- Kirsch A, Lechleiter A. The operator equations of Lippmann-Schwinger type for acoustic and electromagnetic scattering problems in L2. Appl Anal. 2009;88(6):807–830. doi: 10.1080/00036810903042125
- Shestopalov Y, Smirnov Y. Existence and uniqueness of a solution to the inverse problem of the complex permittivity reconstruction of a dielectric body in a waveguide. Inverse Probl. 2010;26(10):105002. doi: 10.1088/0266-5611/26/10/105002
- Shestopalov Y, Smirnov Y. Determination of permittivity of an inhomogeneous dielectric body in a waveguide. Inverse Probl. 2011;27:1817. doi: 10.1088/0266-5611/27/9/095010
- Shestopalov Y, Smirnov Y. Inverse scattering in guides. J Phys: Conf Ser. 2012;346:012019.
- Zakaria A, Gilmore C, LoVetri J. Finite-element contrast source inversion method for microwave imaging. Inverse Probl. 2010;26:115010. doi: 10.1088/0266-5611/26/11/115010
- Medvedik MY, Smirnov YG, Tsupak AA. The two-step method for determining a piecewise-continuous refractive index of a 2D scatterer by near field measurements. Inverse Probl Sci Eng. 2019:1–21. doi:10.1080/17415977.2019.1597872.
- Smirnov YG, Tsupak AA. On the uniqueness of a solution to an inverse problem of scattering by an inhomogeneous solid with a piecewise Hölder refractive index in a special function class. Dokl Math. 2019;99(2):201–203. doi: 10.1134/S1064562419020315
- Medvedik MY, Smirnov YG, Tsupak AA. Two-step method for solving inverse problem of diffraction by an inhomogeneous body. In: Beilina L, Smirnov YG, editors. Nonlinear and inverse problems in electromagnetics. Cham: Springer Proceedings in Mathematics & Statistics. Vol. 243, Springer International Publishing; 2018. p. 83–92.
- Smirnov YG, Tsupak AA. Method of integral equations in the scalar problem of diffraction on a system consisting of a soft and a hard screen and an inhomogeneous body. Differ Equ. 2014;50(9):1150–1160. doi: 10.1134/S0012266114090031
- Smirnov YG, Tsupak AA. Diffraction of acoustic and electromagnetic waves by screens and inhomogeneous solids: mathematical theory. Moscow: RuScience; 2016.
- Vladimirov VS. Equations of mathematical physics. New York (NY): Marcel Dekker; 1971.
- Natterer F. The mathematics of computerized tomography. Stuttgart: Wiley and BG Teubner; 1986.