
 ?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.
?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.Abstract
In this paper, we deal with a nonlinear inverse problem for recovering a time-dependent potential term in a time fractional diffusion equation from an additional measurement in the form of integral over the space domain. By using the fixed point theorem, the existence, uniqueness, regularity and stability of the direct problem are proved. The uniqueness of the inverse problem is proved by the property of Caputo fractional derivative. Numerically, we employ the Levenberg–Marquardt method to find the approximate potential function. Some different type examples are presented to show the feasibility and efficiency of the proposed method.
2010 Mathematics Subject Classification:
1. Introduction
Let Ω be a bounded domain in with sufficiently smooth boundary
Suppose
, consider the following time-fractional diffusion problem
(1)
(1) where
for
denotes the Caputo fractional left-sided derivative of order α with respect to t
in which
is the Gamma function and T>0 is a fixed final time.
If all function and
are given appropriately, the problem (Equation1
(1)
(1) ) is a direct problem. The inverse problem here is to determine the time-dependent potential term
based on problem (Equation1
(1)
(1) ) and an additional condition
(2)
(2) The physical motivation for such an observation is that we have the average information of
in the spatial observation domain Ω, the readers are refereed to [Citation1] and the references therein.
There are some publications on the direct problem for time fractional diffusion equations. Kubica and Yamamoto proved the unique existence of weak solution for a fractional diffusion equation with coefficients depending on spatial and time variables by the Banach fixed point theorem in [Citation2]. Li and Yamamoto proved the unique continuation of solutions for a one dimensional anomalous diffusion equation in [Citation3]. McLean et al. established the well-posedness of an initial-boundary value problem for a general class of linear time fractional, advection–diffusion–reaction equations by using novel energy methods, a fractional Gronwall inequality and several properties of fractional integrals in [Citation4]. See also [Citation5–8] for other time fractional diffusion equation.
About recovering the time-dependent potential term in a fractional diffusion equation, there have been several literatures. In one-dimensional case and higher dimensional case, Zhang [Citation9, Citation10] has proved a uniqueness of the undetermined coefficient problem by introducing an operator and show its monotonicity. Fujishiro [Citation11] proved the stability of a source or a potential term by the generalized Gronwall inequality. Sun [Citation12] considered an inverse time-dependent potential term in a multi-terms time fractional diffusion equation from observations of the solution at an interior or an boundary point, and obtained the stability of inverse problems. About recovering the space-dependent potential term in a fractional diffusion equation, one can see [Citation13–19]. On the determination of coefficients in fractional partial differential equations, one can see the papers [Citation20–22] in handbook published recently. Other inverse problems, one can see [Citation23, Citation24].
To our knowledge, there are no literatures to give the uniqueness of the inverse time-dependent potential term by calculating of variations and the property of Caputo fractional derivative. In this study, we obtain the existence, uniqueness and some regularities of the solution for the direct problem. The uniqueness of the inverse problem is proved by the property of Caputo fractional derivative. Moreover, we use the Levenberg–Marquardt method to solve numerically the inverse problem. Four different type examples are presented to show the feasibility and efficiency of the proposed method.
The rest of this paper has the following structure. In Section 2, we present some preliminaries used in Section 3 and Section 4. In Section 3, we present the existence, uniqueness, regularity and stablity of the solution for the direct problem. We obtain the uniqueness result for the inverse time-dependent potential function problem in Section 4. In Section 5, we use the Levenberg–Marquardt method to find the approximate solution. Numerical results for four examples are provided in Section 6. Finally, we give a conclusion in Section 7.
2. Preliminary
Throughout this paper, we use the following definitions and propositions. The notation C is a generic constant which has a different value everywhere.
Definition 2.1
[Citation25]
If then for
the Riemann-Liouville fractional left-sided integral
of order α are defined by
Lemma 2.2
[Citation25]
If then the equation
is satisfied at almost every point
Lemma 2.3
[Citation26]
For any function , i.e. v is absolutely continuous on
the following equality takes place:
where
Corollary 2.4
If we have
where
is the inner product in
space.
Definition 2.5
[Citation26]
The Mittag–Leffler function is
(3)
(3) where
and
are arbitrary constants. The function
is an entire function, and thus the function
is real analytic for
Lemma 2.6
[Citation27]
Let and
be arbitrary. We suppose that μ is such that
. Then there exists a positive constant
such that
(4)
(4)
Lemma 2.7
[Citation28]
Let and
with
and
Then the function
defined by
belong to
and satisfies
Lemma 2.8
[Citation11]
Let and
Then
with the estimate
with C>0 depending on
Lemma 2.9
[Citation29]
Let and
be nonnegative functions satisfying
Then we have
Proposition 2.10
[Citation25]
let and
then we have
Lemma 2.11
Suppose denote
and define
then
Proof.
By Lemma 2.7, we know
By and
we have
since
by Lemma 2.7, we know
thus
3. Existence, uniqueness and regularity of solution for the direct problem
In this paper, we need the property of Caputo fractional derivative when we prove Theorem 4.1, so we need the regularity of solution Based on the fixed point method, we give the existence, uniqueness and regularity of solution
for the direct problem (Equation1
(1)
(1) ).
Theorem 3.1
Let ,
and
such that
. Then there exists a unique solution
to (Equation1
(1)
(1) ) such that
for
Moreover, we get
(5)
(5) with C>0 depending on
and
In order to prove Theorem 3.1, we consider the time fractional diffusion equation with more general data.
(6)
(6) We assume the following conditions hold
(7)
(7)
(8)
(8)
Let us consider the following intermediate result.
Lemma 3.2
Let (Equation7(7)
(7) ) and (Equation8
(8)
(8) ) hold. Then there exists a unique solution
to (Equation6
(6)
(6) ) such that
for
Moreover, we get
(9)
(9) with C>0 depending on
and
If we define , then under the conditions for m and n in Theorem 3.1, the condition (Equation7
(7)
(7) ) is satisfied. Thus, we just have to verify Lemma 3.2.
Noting that is a self-adjoint and positive operator in
. We denote the eigenvalues of
as
and the corresponding eigenfunctions as
which means we have
We set
,
and
is an orthonormal basis in
. Define the Hilbert scale space
for
(see [Citation30]) by
where
is the inner product in
space. Define its norm
According to [Citation31, Citation32], we have
(10)
(10)
(11)
(11)
We denote the operator valued function
by
with the Mittag–Leffler function given by Definition 2.5. We can get
where
denotes the bounded linear operator in
From and Lemma 2.6, we can obtain
(12)
(12)
Consider the following initial boundary value problem
(13)
(13) By [Citation8], we know that (Equation13
(13)
(13) ) exists a unique solution provided by
(14)
(14)
By Proposition 2.10, we have
(15)
(15)
where
By
it yiel ds
for
Since
hence the series (Equation15
(15)
(15) ) is uniformly convergent for
, by Lemma 2.11, we know each term in (Equation15
(15)
(15) ) is continuous on
thus
. It is easy to prove
and obtain the following estimate
Note that by a simple calculate, we have
Similar to the proof in (Equation15
(15)
(15) ), we have
thus
And also get
(16)
(16) By the generalized Minkowski inequality, we have
Similarly, we can obtain
Denote
Here we define the map as
(17)
(17) Therefore, we have
(18)
(18) Next we give the proof of Lemma 3.2
Proof of Lemma 3.2.
The problem (Equation6(6)
(6) ) could be written as
(19)
(19) We see from (Equation14
(14)
(14) ) that the solution v of (Equation19
(19)
(19) ) can be written as
(20)
(20)
By Lemma 2.8 and (Equation7
(7)
(7) ), we know that
and
(21)
(21) where C>0 is depending on
In (Equation15(15)
(15) ), let
we know
then
By Lemma 2.8 and (Equation7(7)
(7) ), we know that
and
(22)
(22)
(23)
(23)
where
are depending on
respectively.
Define an operator , by
in which we denote the map
by
Then we just need to prove there exists a unique fixed point of Y.
By induction, we have
where we denote
By (Equation12(12)
(12) ) and (Equation21
(21)
(21) ), we obtain
(24)
(24)
Note that
by the generalized Minkowski inequality and (Equation22
(22)
(22) ), (Equation23
(23)
(23) ), we have
(25)
(25)
Repeating the similar calculation, by (Equation24
(24)
(24) ), we have
By (Equation24
(24)
(24) ) and (Equation25
(25)
(25) ), we have
By induction, we have
Therefore, we have
(26)
(26) where
Therefore, for
we obtain
It is easy to verify
as
Therefore, we have
for sufficiently large
Therefore, the operator
is a contraction mapping from X into itself. Hence the mapping
has a unique fixed point still denoted by
that is,
Since
the point
is also a fixed point of the mapping
By the uniqueness of the fixed point of
we have
that is, the equation
has a unique solution v in X. Moreover, we have
As
by (Equation18
(18)
(18) ) and (Equation26
(26)
(26) ), we have
By take sufficiently large
such that
we have
(27)
(27) with C>0 depending on
and
Now we fix . Similar to the treatment of (Equation24
(24)
(24) ), we obtain
(28)
(28)
Since
further, by Proposition 2.10, we have
(29)
(29)
Since
see [Citation33], then we have
If we choose
then the series
is convergent. Combining
we obtain the series (Equation29
(29)
(29) ) is uniformly convergent. Thus
Similarly,
hence
and from (Equation29
(29)
(29) ), we have
(30)
(30) It is not hard to know
Since
by the same process we have
and
(31)
(31) From (Equation27
(27)
(27) ), (Equation30
(30)
(30) ) and (Equation31
(31)
(31) ), we have
(32)
(32) Therefore, we have
with
from (Equation10
(10)
(10) ), we have
(33)
(33) By the original equation
combining (Equation21
(21)
(21) ), (Equation27
(27)
(27) ) and (Equation33
(33)
(33) ), we see that
with the estimate
Thus we complete the proof.
We can obtain the following stability result for the direct problem.
Theorem 3.3
Let and
such that
. Let
be the solution of (Equation1
(1)
(1) ) for
with
. Then there exists a constant C>0 depending on
and
such that
(34)
(34)
Proof.
We set and
Then u solves
(35)
(35) Denote
and
and
is given by
First we estimate
By Lemma 2.8, we see that
and the estimate from (Equation27
(27)
(27) )
(36)
(36) with C>0 depending on
and
. Similar to the argument of (Equation24
(24)
(24) ), we have from (Equation36
(36)
(36) ) that
with C>0 depending on
and
,
.
Denote then by Lemma 2.9, we obtain
Since
thus we obtain
By the generalized Minkowski inequality for the convolution, we have
That means (Equation34
(34)
(34) ) is true.
4. Uniqueness for the inverse problem
Assume . Let
with
be the solution of (Equation1
(1)
(1) ) corresponding to m, then it is easy to know
satisfies the following variational formulation
(37)
(37) for any
and
is the inner product in
.
Now, we will demonstrate the uniqueness result for the inverse potential coefficient problem.
Theorem 4.1
Let and
. Suppose
with
,
and
be the solution of (Equation1
(1)
(1) ) corresponding to the potential m and
respectively.
If
(38)
(38) for all
then we have
Proof.
Instead of by
in (Equation37
(37)
(37) ), then we have
(39)
(39) The equivalent form of this relation written as
(40)
(40) We sum up (Equation39
(39)
(39) ) and (Equation40
(40)
(40) ) and obtain
(41)
(41) Take
and by (Equation38
(38)
(38) ), we have
(42)
(42) By Corollary 2.4, we have
(43)
(43) Operating both sides by
, Lemma 2.2 and using
we get
(44)
(44) where we apply the facts that if
then
(see [Citation34]), which makes the following computation meaningful:
From (Equation44
(44)
(44) ) and
, we conclude that
Inserting into (Equation39
(39)
(39) ), we have
We set
According to the fact that
we obtain
for a. e.
The continuity of yields
on
5. Levenberg–Marquardt regularization method
In the actual computations, we infer a numerical method for reconstructing the potential function of the problem (Equation1
(1)
(1) ) by the additional observation data
Based on Theorem 3.1, we can define a forward nonlinear operator
(45)
(45) where
is the solution of (Equation1
(1)
(1) ) corresponding to m. So we turn the problem of recovering a time-dependent potential term problem into solving the following abstract operator equation
(46)
(46) We consider the Levenberg–Marquardt method for solving nonlinear ill-posed inverse problem. We suppose that
is an approximation of m at the jth step, then the linearization around
instead of the nonlinear mapping
in (Equation45
(45)
(45) )
(47)
(47) Then we turn the nonlinear inverse problem
into the following linear problem
(48)
(48) Therefore, by Levenberg–Marquardt, the
th step is approximated by minimizing
(49)
(49) and let
is a noisy data of R satisfying
is given by
for some
and
Next, we are going to solve the problem (Equation49(49)
(49) ).
We firstly discrete the minimization problem. Assume that is a set of basis functions in
let
where
and
is the K-dimensional approximate solution to
and
are the expansion coefficients. We set
and a K-dimensional vector
We recover an approximation
with a vector
From the above discussions, by defining
We are going to solve the following minimization problem
(50)
(50) where
and
denotes the transpose of
Then the iterative algorithm is
We discretize the time domain
with
then the
norm can be reduced to the discrete Euclidean norm and the minimization problem (Equation50
(50)
(50) ) at the jth step becomes
(51)
(51)
τ denotes the numerical differential step, and
Based on the variational result, the problem (Equation51
(51)
(51) ) is obtained by solving the linear system of equation
(52)
(52) So
6. Numerical experiments
In this section, we provide four different type examples to verify the usefulness of the proposed methods.
The measurement data is generated by adding random noises uniformly distributed in
as
the corresponding noise level is computed by
numerically.
To state the accuracy of numerical solution, we calculate the approximate error denoted by
where
is the coefficient term reconstructed at the jth iteration, and
is the exact solution.
Choose
The residual at the jth iteration is given by
In an iteration algorithm, the key work is to find an appropriate stopping rule. In this literature, we use the well-known Morozov's discrepancy principle [Citation35]. From [Citation36], we take
and choose N satisfying the following inequality
If
then we take N = 15 for the following examples.
For solving the direct problem, we use the finite difference method in [Citation37].
6.1. One-dimensional case
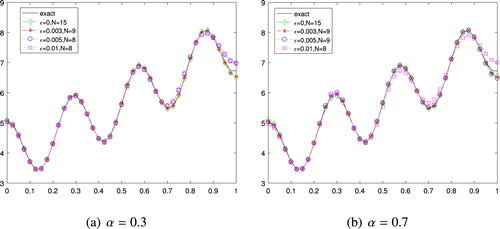
Example 6.1
Let . Take
and
,
. We take a numerical differentiation step size
. We choose the initial guess as
We set K = 11.
The numerical results for Example 6.1 with various noise levels in the case of
are shown in Figure . We can see that the numerical results for Example 1 match the exact ones quite well even up to
noise added in the exact data
Figure 1. The numerical results and the exact solution for Example 6.1. (a) . (b)
.
In Table , we show the numerical errors with different α and ϵ. It can be seen that the numerical results become a little worse when the relative noise levels increase and not sensitive to the fractional order α.
Table 1. The numerical relative errors  of Example 1 for different α and ϵ.
of Example 1 for different α and ϵ.
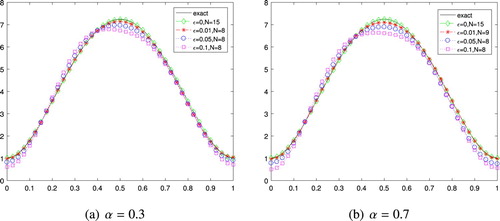
Example 6.2
Let Take
and
. We take a numerical differentiation step size
We choose the initial guess as
We set K = 9.
The numerical results for Example 6.2 with various noise levels in the case of
are shown in Figure . We can see that the numerical results for Example 6.2 match the exact ones quite well even up to
noise added in the exact data
Figure 2. The numerical results and the exact solution for Example 6.2. (a) . (b)
.
6.2. Two-dimensional case
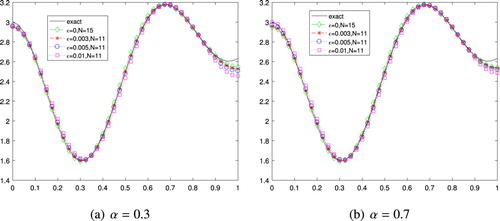
Example 6.3
Let . Take
and
. We take a numerical differentiation step size
. We choose the initial guess as
. We set K = 5.
The numerical results for Example 6.3 with various noise levels in the case of
are shown in Figure . We can see that the numerical results for Example 6.3 match the exact ones quite well even up to
noise added in the exact data
.
Figure 3. The numerical results and the exact solution for Example 6.3 (a) . (b)
.
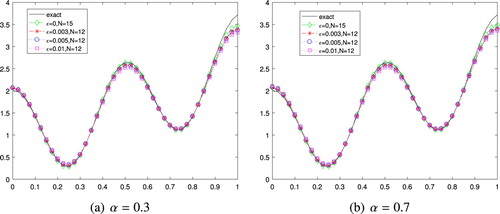
Example 6.4
Let Take
and
. We take a numerical differentiation step size
. We choose the initial guess as
. We set K = 5.
The numerical results for Example 4 with various noise levels in the case of
are shown in Figure . We can see that the numerical results for Example 6.4 match the exact ones quite well even up to
noise added in the exact data
Figure 4. The numerical results and the exact solution for Example 6.4. (a) . (b)
.
7. Conclusions
In this paper, we investigate the time-dependent potential term in a time fractional diffusion equation. The existence, uniqueness and regularity of the solution for the direct problem are obtained by the fixed point theorem. Then the uniqueness of the solution for the inverse problem is provided by the property of Caputo fractional derivative. Finally, we employ the Levenberg–Marquardt method to find the approximation of the potential function.
Disclosure statement
No potential conflict of interest was reported by the author(s).
Additional information
Funding
References
- Slodicka M, Van Keer R. Determination of a robin coefficient in semilinear parabolic problems by means of boundary measurements. Inverse Probl. 2002;18:139–152. doi: 10.1088/0266-5611/18/1/310
- Kubica A, Yamamoto M. Initial-booundary value problems for fractional diffusion equations with time-dependent coefficients. Fract Calc Appl Anal. 2018;21(2):276–311. doi: 10.1515/fca-2018-0018
- Li Z, Yamamoto M. Unique continuation principle for the one dimensional time fractional diffusion equation. Fract Calcul Appl Anal. 2019;22(3):644–657. doi: 10.1515/fca-2019-0036
- McLean W, Mustapha K, Ali R, et al. Well-posedness of time-fractional, advection-diffusion-reaction equations. Fract Calc Appl Anal. 2019;22(4):918–994. doi: 10.1515/fca-2019-0050
- Gorenflo R, Luchko R, Yamamoto M. Time fractional diffusion equation in the fractional Sobolev spaces. Fract Calc Appl Anal. 2015;18:799–820. doi: 10.1515/fca-2015-0048
- Liu Y, Rundell W, Yamamoto M. Strong maximum principle for fractional diffusion equations and an application to an inverse source problem. Fract Calc Appl Anal. 2016;19:888–906.
- Luchko Y. Maximum principle for the generalized time fractional diffusion equation. J Math Anal Appl. 2009;351:218–223. doi: 10.1016/j.jmaa.2008.10.018
- Sakamoto K, Yamamoto M. Initial value/boundary value problems for fractional diffusion-wave equations and applications to some inverse problems. J Math Anal Appl. 2011;382:426–447. doi: 10.1016/j.jmaa.2011.04.058
- Zhang Z. An undetermined time-dependent coefficient in a fractional diffusion equation. Inverse Probl Imaging. 2017;11(5):875–900. doi: 10.3934/ipi.2017041
- Zhang ZD. An undetermined coefficient problem for a fractional diffusion equation. Inverse Probl. 2016;32:015011.
- Fujishiro K, Kian Y. Determination of time dependent factors of coefficients in fractional diffusion equations. Math Control Relat Fields. 2016;6(2):251–269. doi: 10.3934/mcrf.2016003
- Sun LL, Zhang Y, Wei T. Recivering the time dependent potential function in a multi-term time fractional diffusion equation. Appl Numer Math. 2019;135:228–245. doi: 10.1016/j.apnum.2018.09.001
- Jin B, Rundell W. A tutorial on inverse problem for anomalous diffusion processes. Iverse Probl. 2015;31:035003.
- Jin BT, Rundell W. An inverse problem for a one-dimensional time-fractional diffusion problem. Inverse Probl. 2012;28:075010.
- Miller L, Yamamoto M. Coefficient inverse problem for a fractional diffusion equation. Inverse Probl. 2013;29(7):0750013. doi: 10.1088/0266-5611/29/7/075013
- Sun L, Wei T. Identification of zero order coefficient in a time fractional diffusion equation. Appl Numer Math. 2017;111:160–180. doi: 10.1016/j.apnum.2016.09.005
- Tuan VK. Inverse problem for fractional diffusion equation. Fract Calc Appl Anal. 2011;14(1):31–55. doi: 10.2478/s13540-011-0004-x
- Yamamoto M, Zhang Y. Conditional stability in determining a zeroth-order coefficient in a half-order fractional diffusion equation by a Carleman estimate. Inverse Probl. 2012;28(10):105010. doi: 10.1088/0266-5611/28/10/105010
- Zhang Z, Zhou Z. Recovering the potential term in a fractional diffusion equation. IMA J Appl Math. 2017;82:579–600. doi: 10.1093/imamat/hxx004
- Li Z, Yamamoto M. Inverse problems of determining coefficients of the fractional partial differential equations. In: Kochubei A, Luchko Y, editors, Handbook of fractional calculus with applications. Vol. 2; 2019. p. 443–464.
- Li Z, Yamamoto M. Inverse problems of determining sources of the fractional partial differential equations. Kochubei A, Luchko, Y, editors, Handbook of fractional calculus with applications. Vol. 2; 2019. p. 411–430.
- Liu Y, Li Z, Yamamoto M. Inverse problems of determining parameters of the fractional partial differential equations. Kochubei A, Luchko Y, editors, Handbook of fractional calculus with applications. Vol. 2; 2019. p. 431–442.
- Jiang D, Li Z, Liu Y, et al. Weak unique continuation and a related inverse source problem for time fractional diffusion equations. Inverse Probl. 2017;33(5):055013. doi: 10.1088/1361-6420/aa58d1
- Li Z, Imanuvilov OY, Yamamoto M. Uniqueness in inverse boundary value problems for fractional diffusion equations. Inverse Probl. 2016;32(1):015004. doi: 10.1088/0266-5611/32/1/015004
- Kilbas A, Srivastava H, Trujillo J. Theory and applications of fractional differential equations. Vol. 204. Amsterdam: Elsevier; 2006. 2453–2461.
- Alikhanov AA. Boundary value problems for the diffusion equation of the variable order in differential and difference settings. Appl Math Comput. 2012;219:3938–3946.
- Podlubny I. Fractional differential equations. San Diego: Acad Press. 1999.
- Brezis H. Functional analysis, sobolev spaces and partial differential equations. Universitext. 2012;88(2):117–126.
- Henry D. Geometric theory of semilinear parabolic equations. Berlin: Springer-Verlag; 1981. (Lecture Notes in Mathematics; 840).
- Pazy A. Semigroups of linear operators and applications to partial differential equations. Berlin,: Springer-Verlag; 1983.
- Fujiwara D. Concrete characterization of the domains of fractional powers of some elliptic differential operators of the second order. Proc Jpn Acad. 1967;43(2):82–86. doi: 10.3792/pja/1195521686
- Gorenflo R, Yamamoto M. Operator-theoretic treatment of linear abel integral equation of first kind. Jpn J Ind Appl Math. 1999;16(1):137–161. doi: 10.1007/BF03167528
- Courant R, Hilbert D. Methods of mathematical physics. Vol. 1, New York: Interscience; 1953.
- Royden HL. Real analysis. Vol. 71. Princeton: Princeton University Press; 1963. 402.
- Morozov V, Nashed Z, Aries A. Methods for solving incorrectly posed problems. New York: Springer-Verlag; 1984.
- Hanke M, Hansen P. Regularization methods for large-scale problems. Surv Math Ind. 1993;3(4):253–315.
- Murio DA. Implicit finite difference approximation for time fractional diffusion equations. Comput Math Appl. 2008;56(4):1138–1145. doi: 10.1016/j.camwa.2008.02.015