
 ?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.
?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.Abstract
In this paper, we use asymptotic expansion of the velocity field to reconstruct small deformable droplets (i.e. their forms and locations) immersed in an incompressible Newtonian fluid. Here the fluid motion is assumed to be governed by the non-stationary linear Stokes system. Taking advantage of the smallness of the droplets, our asymptotic formula and identification methods extend those already derived for rigid inhomogeneity and for stationary Stokes system. Our derivations, based on dynamical boundary measurements, are rigorous and proved by involving the notion of viscous moment tensor VMT. The viability of our reconstruction approach is documented by numerical results.
1. Introduction
In this paper, we derive an asymptotic expansion of a weighted boundary measurements, expressed in term of velocity field, in the presence of multiple small deformable droplets (modelled by deformable inhomogeneities) immersed in an incompressible Newtonian fluid. This asymptotic expansion, through a convenable application system, will allow us to identify these droplets having kinematic viscosities different from the background medium. The system is modeled as a non-stationary Stokes flow, in an open bounded domain that contains deformable inhomogeneities (droplets) of small size, say α. The non-stationary Stokes equations are a standard system of PDE's governing the flow of continuum matter in fluid form, such as liquid or gas, occupying the domain Ω. These equations describe the change with respect to time
of the velocity and pressure of the fluid.
The detection and the reconstruction of an object immersed in a fluid is a source of many investigations [Citation1–7]. This kind of inverse problems arises, for example, in moulds filling during which small gas bubbles can be created and trapped inside the material (as it is mentioned in [Citation5,Citation7]) or in the detection of mines.
In this paper, we consider a dilute suspension of deformable droplets in a matrix fluid. We assume that the droplets and matrix fluid to be Newtonian and neglect inertia and body forces. As it is mentioned in [Citation6], the evolution of droplet shape only depends on the viscosity difference between the fluids and on surface tension. Then, we make the assumption of small size of these inhomogeneities to use asymptotic formula which allows us to solve a given inverse problem. This assumption was used before, for different kinds of problems, in [Citation3,Citation7–11] and in others. We further assume that the small droplets are at a distance away from each other, and are also away from the boundary, to be able to neglect droplet interactions and their interaction with the boundary
.
The goal of this work is to expand, in a mathematically rigorous way, a numerical approach to identify the locations of the droplets from boundary measurements of the velocity field. We get an asymptotic expansion of solutions to the transmission problem for the non-stationary Stokes equations in terms of the geometry of the droplets. This procedure describes the perturbation of the solution caused by the presence of deformable obstacles with small diameters. Based on this results, we derive an asymptotic expansion for a weighted boundary measurements (as
) in terms of viscous moment tensor VMT. This is partially inspired from the general idea developed, for a heat equation, in [Citation8] to locate multiple inclusions and from the fact that the Stokes system can be viewed as the incompressible limit (the compression modulus is infinite) [Citation3].
The formula that is developed is considerably different from the topological sensitivity analysis method and allows us to find the locations of the inhomogeneities with significant accuracy. It is explicit and can be easily performed numerically. The results and the general approach that we will adopt here extend more those for rigid inclusions [Citation2,Citation4,Citation5,Citation12–14] and for stationary stokes cases [Citation3,Citation6,Citation7,Citation11,Citation15] among others. However, they remain a little close to the common ideas of that developed for reconstructing small conductivity inclusions from boundary measurements, see [Citation9,Citation10,Citation12,Citation16,Citation17] and the references therein. In addition, readers are recommended to consult important works on other types of inverse problems [Citation18–21], and do not forget that we can refer to the books (for example, [Citation22–24]) to get acquainted with the main notations, the calculation techniques and the most well-known theorems used naturally for Stokes system.
The paper is organized as follows. In the next section, we formulate our model problem for droplets in a non-stationary Stokes flow. We state our main results in Section 3. The rigorous derivation of the asymptotic expansion, for the pattern , is detailed in Section 4 in terms of the notion of viscous moment tensor VMT. In Section 5, we use our asymptotic expansion to make up a reconstruction method by introducing a so-called identifier of interest which, by some T>0, recover the discrete locations
of the droplets. We then perform numerical experiments to test the viability of the method.
2. Problem formulation
Let Ω be a bounded, open connected subdomain of , d = 2, 3 with
- boundary
. Let ν denote the outward unit normal to
. We suppose that Ω contains a finite number of droplets, each of the form
, where
is a bounded, smooth domain containing the origin. The total collection of deformable inhomogeneities thus takes the form
. The points
that determine the location of the droplets are assumed to satisfy
(1)
(1)
We also assume that
, the common order of magnitude of the diameters of the inhomogeneities, is sufficiently small that these are disjoint and their distance to
is large than
. Let
denote the viscosity of the background medium, for simplicity we shall assume in this paper that it is constant. Let
denote the constant viscosity of the jth inhomogeneity
. Using this notation, we introduce the piecewise constant kinematic viscosity
Before formulating the model problem in the presence of droplets and via a non-stationary Stokes flow, we introduce the following notations.
Notation: denotes the unit matrix in
, and
denotes the identity fourth-order tensor. The scalar product on
is defined by
where the superscript tr denotes the transpose of a matrix.
denotes the space of the functions of
which differ by a constant and throughout this paper, the inner product between two vectors u and w is denoted by
. The strain rate tensor
for the flow is defined as follows:
(2)
(2)
The divergence of a matrix-valued function A is denoted
, while the divergence of a vector-valued function u is denoted
. From now we denote by
the space of vector-valued functions whose components of its elements belong to the space
of square integrable functions. Likewise, we denote by
the space of vector-valued functions where the notation
is used to denote those functions who along with all their derivatives of order less than or equal to s are in
. We denote by
the trace space.
Let be the solution to the following non-stationary linearized Navier–Stokes system:
(3)
(3)
Here T>0 is a final observation time, the initial condition
and,
is a non-homogeneous Dirichlet boundary data satisfying the standard flux compatibility condition:
(4)
(4)
We denote by the solution of the non-stationary incompressible Stokes problem in the absence of any deformable inhomogeneities (the background solution):
(5)
(5)
where φ and g are given in (Equation3
(3)
(3) ).
Let us now recall the notion of viscous moment tensor (VMT) which appears naturally as a limit of the elastic moment tensor (EMT) corresponds to the Lamé system and introduced firstly in [Citation9]. We still denote by μ the viscosity in the whole space containing a rescaled inhomogeneity, i.e.
for
.
According to [Citation3,Citation9] we define the symmetric, fourth-order, viscous moment tensor (VMT) denoted by as follows:
(6)
(6)
where, for
,
is the solution to
(7)
(7)
The subscripts + and − indicate the limits from outside and inside of , respectively, and throughout this paper
denotes the standard basis for
. Moreover, for
we denote
Kronecker's index is denoted by
.
3. The main results
The main objective of this article is to find several small deformable droplets modelled by
(8)
(8)
included in Ω and located at points
,
.
Let v be the solution to (Equation5(5)
(5) ), then it is convenient to define the conormal derivative
on
by:
Similarly, for the solution
of (Equation3
(3)
(3) ), we may introduce the conormal derivative;
because
on
(outside of
,
). Consequently,
Then we have,
(9)
(9)
where generally
denotes the stress tensor, and
the Cauchy force on the boundary
.
To give the main results of this paper, we need firstly to define in terms of the Cauchy force , given by (Equation9
(9)
(9) ), the following weighted boundary measurements:
(10)
(10)
where
, v are the solutions to (Equation3
(3)
(3) ) and (Equation5
(5)
(5) ), respectively, and the vector-valued function
satisfies
in
with
for
,
.
According to (Equation10(10)
(10) ), we propose a resolution of the inverse problem of reconstructing
based on the following main result.
Theorem 3.1
Let T>0 and , d = 2 or d = 3, be a bounded domain with
-boundary. Suppose that we have all hypothesis (Equation1
(1)
(1) ) and (Equation4
(4)
(4) ). Let
, v be solutions to (Equation3
(3)
(3) ) and (Equation5
(5)
(5) ) respectively. Then, the following asymptotic expansion for
holds as
:
(11)
(11)
The proof of the above theorem will be given later. On the other hand, by making appropriate choice of test function ψ and background solution v, we will develop from the asymptotic formula given by Theorem 3.1 an efficient location search algorithm for detecting the droplets . This problem of reconstruction will be based on finite measurements of the Cauchy force
defined by (Equation9
(9)
(9) ) on
.
Before proving Theorem 3.1, we suggest the following estimate of as follows.
Theorem 3.2
Let T>0 and , d = 2 or d = 3, be a bounded domain with
-boundary. Suppose that we have all hypothesis (Equation1
(1)
(1) ) and (Equation4
(4)
(4) ). Let
, v be solutions to (Equation3
(3)
(3) ) and (Equation5
(5)
(5) ), respectively. Then, there exist a constant C such that
(12)
(12)
Here C can be given explicitly and dependant on T, v,
,
and
.
Proof.
Let be the solution to (Equation5
(5)
(5) ) and v the solution to (Equation3
(3)
(3) ), respectively. Expanding the following
(13)
(13)
Choosing
as a test function in (Equation3
(3)
(3) ), integration by parts over Ω yields
where we have used
. Then by considering the Dirichelet conditions on
, for both vector-valued functions v and
, the following holds
(14)
(14)
Inserting (Equation14
(14)
(14) ) into relation (Equation13
(13)
(13) ), we obtain that,
(15)
(15)
where
is given by (Equation8
(8)
(8) ). On the other hand, choosing
as a test function in (Equation5
(5)
(5) ), then by integrating by parts over Ω and as done for (Equation14
(14)
(14) ), we may obtain that
(16)
(16)
Subtracting relation (Equation15
(15)
(15) ) from (Equation16
(16)
(16) ), we immediately obtain
That is,
(17)
(17)
Now inserting (Equation16
(16)
(16) ) and (Equation14
(14)
(14) ) into (Equation17
(17)
(17) ), the following holds
(18)
(18)
Let
, then by definition of
, we have
and
. Moreover, the following holds,
Therefore relation (Equation18
(18)
(18) ) becomes,
and this together with Cauchy–Schwarz inequality and the fact that
is bounded in
(by assumption of regularity of v) enables one to get the following estimates:
Thus,
and the desired result follows immediately by invoking the Korn inequality.
4. Proof of the asymptotic formula
In this section, we focus our attention on proving rigorously Theorem 3.1. Let us, firstly, introducing the following vector-valued function
(19)
(19)
where
, v and
are solutions to (Equation3
(3)
(3) ), (Equation5
(5)
(5) ) and (Equation7
(7)
(7) ), respectively. It is clearly that
since
, the function
does not depend on space variable x and the solution
of (2.7) belongs to
.
The following estimate holds.
Proposition 4.1
Let d = 2, 3. Suppose that we have all hypothesis (Equation1(1)
(1) ) and (Equation4
(4)
(4) ) and let V be given by (Equation19
(19)
(19) ). Then, there exist a constant C such that,
(20)
(20)
Here the constant C is independent of α.
Proof.
We set,
(21)
(21)
and we observe that
satisfies:
(22)
(22)
where
.
Hence to prove (Equation20(20)
(20) ), it suffices to estimate the term
. To do this we may find out, firstly, the equations that the vector-valued function
can satisfy in the rescaled domain
.
Let where
, p are introduced in (Equation3
(3)
(3) ) and (Equation5
(5)
(5) ), respectively. One may use (Equation19
(19)
(19) ) to observe that V satisfies:
Moreover, we have
and
Now let
and
for i = 2, 3. Then it is easily seen that
satisfies:
(23)
(23)
Now, using the trace estimate and integrations by parts over for
, straightforward calculations give
(24)
(24)
where the constants C,
depend only on the domains Ω,
,
, and the constants
,
.
Now we need to estimate the following terms:
Before doing this we recall from (Equation7
(7)
(7) ) that,
(25)
(25)
where for
,
Since
, we have
(26)
(26)
Therefore,
(27)
(27)
Moreover, by definition of
we get that
From (Equation26
(26)
(26) ) and the fact that v is a smooth vector-valued function, we obtain:
(28)
(28)
On the other hand, we have
Consequently,
and hence
(29)
(29)
Regarding (Equation25
(25)
(25) ) and (Equation21
(21)
(21) ), we can write
for all
. Thus,
(30)
(30)
Now from (Equation24
(24)
(24) ) we have,
(31)
(31)
Therefore by using (Equation27
(27)
(27) )–(Equation30
(30)
(30) ) the inequality (Equation31
(31)
(31) ) becomes:
(32)
(32)
On the other hand, by change of variable at t, we have:
which by (Equation32
(32)
(32) ) becomes:
(33)
(33)
To achieve the proof, we may insert (Equation33
(33)
(33) ) into relation (Equation22
(22)
(22) ).
We now proceed to prove Theorem 3.1.
Proof of Theorem 3.1.
Proof of Theorem 3.1.
Let us start by simplifying the definition (Equation10(10)
(10) ). So let setting
where
, v are solutions to (Equation3
(3)
(3) ) and (Equation5
(5)
(5) ), respectively. Then integrating by parts over
, and using both conditions
and
, we obtain that
Taking (Equation9
(9)
(9) ) into consideration, the following holds:
(34)
(34)
On the other hand, by integrating by parts over
, we have
(35)
(35)
Replacing in the right-hand side of (Equation35
(35)
(35) ) and integrating by parts over Ω, we obtain that
Therefore, by integrating by parts again, we obtain
where from Sections 2 and (Equation8
(8)
(8) ) we have
.
Further, returning up to relation (Equation35(35)
(35) ) and using the above relation, the following holds:
Now one may compare relations (Equation34
(34)
(34) ) and (Equation10
(10)
(10) ) to find that,
(36)
(36)
Moreover, since
as
and the fact that the inclusions are well separated, it follows from (3.1) and (Equation36
(36)
(36) ) that
and hence, by using Proposition 4.1, the following inequality holds
(37)
(37)
On the other hand, since both v and ψ are divergence free, we have for all
:
(38)
(38)
Now inserting (Equation38
(38)
(38) ) into the left-hand side of (Equation37
(37)
(37) ), we obtain that
which by definition (Equation6
(6)
(6) ) gives that,
Thus,
which achieves the proof of Theorem 3.1.
5. Reconstruction of the inhomogeneities
In this section, we use Theorem 3.1 (with a suitable choice of test functions ψ and background solutions v) in order to identify the location of the inhomogeneities
which are immersed in an incompressible Newtonian fluid. Then we utilise the asymptotic perturbation formula (Equation11
(11)
(11) ) to design a non-iterative MUSIC (multiple signal classification) type reconstruction method to recover the positions, of these well-separated diametrically small inhomogeneities, from the given boundary data. Our method is similar to the reconstruction method which was developed for an inverse heat conduction problem in [Citation8] and is somewhat related, for example, to the real-time location search algorithm developed in [Citation17], to the reconstruction method in a two-dimensional open waveguide [Citation25] and to the linear sampling method [Citation26,Citation27]. We restrict our development, in this section, to the two-dimensional case while the three-dimensional case can be done in the same way.
Let ψ be the function introduced in Section 3 satisfying in
with
for
. For
, we choose the test function
(39)
(39)
where
is a constant vector (can be given explicitly) and
.
More precisely,
(40)
(40)
Therefore, by using (Equation2
(2)
(2) ) we get exactly
(41)
(41)
where
,
,
means the tensor product given by
, the matrix
and tr denotes the transpose.
On the other hand, for , we choose one of background solution as follows
(42)
(42)
and similarly to (Equation41
(41)
(41) ), we have
(43)
(43)
where
is a known constant vector and the matrix
is given by
. Here the Dirichlet condition g corresponds to the point source
with initial condition
in Ω. Consequently, in the presence of the deformable inhomogeneities
,
and by using Theorem 3.1, we can obtain by considering (Equation41
(41)
(41) ) and (Equation43
(43)
(43) ) that
(44)
(44)
Let P be the orthogonal projection from the space of symmetric matrices onto the space of symmetric matrices with trace zero, and let ,
be defined as in Section 2. Then, according to [Citation9] we define the orthogonal projection
as follows
or,
(45)
(45)
Now we recall that the (4-tensor) viscous moment tensor
can be considered as a linear transformation on the space of symmetric matrices due to its symmetry. Then, as the Stokes system appears as a limiting case of the Lamé system, all coefficients of
can be determined explicitly by using P and the (4-tensor) elasticity moment tensor (EMT). For more details, one can refer to [Citation3,Citation9].
5.1. Location search algorithm
Next, suppose for the sake of simplicity that all the domains are disks. Then it follows from [Citation3] that
, where P is given by (Equation45
(45)
(45) ) and
Let the source points
(for
) having the property that any analytic function which vanishes in
vanishes identically. Then the proposed location method for detecting the droplets
is as follows. For
and according to (Equation44
(44)
(44) ), define the matrix
by
where
are given in (Equation41
(41)
(41) ) and (Equation43
(43)
(43) ), respectively. On the other hand, we can define the symmetric real matrix
by
One can remark that the matrix C may be decomposed as follows
for some
, where
and
denotes the transpose of
. Let
be the components of the vector
.
Then, for and for
we define the vector
by
We now show how to apply the MUSIC-type algorithm for recovering the location
of the inhomogeneities from the matrix A. Let
for
,
, and
. For
, we also introduce
Then we can now characterize the location of the droplets in terms of the range of the matrix A through the following lemma. The proof is somewhat close to those of [Citation8, Lemma 5.2] and [Citation25, Lemma 4.1].
Lemma 5.1
We characterize the location of the inhomogeneities in terms of the range of the matrix A as follows:
(46)
(46)
Proof.
Let and suppose that
. Then, for
,
is written as a linear combination of
for
. So,
where
are constants. Consequently,
for all
and where
are given constants. Keeping in mind that the countable set of sources
has the property that any analytic function which vanishes in
vanishes identically, we then obtain
(47)
(47)
for all
and
;
. Returning up to (Equation40
(40)
(40) )–(Equation42
(42)
(42) ), then by (Equation47
(47)
(47) ) and for
,
, we obtain that
(48)
(48)
and by following the idea in [Citation8], one may take the Laplacian in y for the above relation to get, for
, that
(49)
(49)
Now integrating (Equation48
(48)
(48) ) over Ω, we obtain that
(50)
(50)
So,
Let us focus on the left side of the above relation. Recall that v solves (Equation3
(3)
(3) ), then integration by parts over Ω yields
Then, the left side of (Equation50
(50)
(50) ) can be written as follows:
Thus,
(51)
(51)
Since
,
and for any smooth scalar functions f and g we have
, then the following holds
Therefore,
where
is a smooth function. After that, integration by parts over
yields
(52)
(52)
Consider now the components of the fundamental Stokes tensor
and those of the associated pressure vector
, which determine the fundamental solution
of the Stokes system in
. Knowing that the functions
are expressed in terms of integral operators having kernels
and that
which means by considering (Equation52
(52)
(52) ) that
is singular at the point z. Consequently, by (Equation51
(51)
(51) ),
is singular at the point z which leads to a contradiction if
according to (Equation49
(49)
(49) ). Then
and the proof is achieved.
The reconstruction algorithm is as follows.
Define the singular value decomposition (SVD) of the matrix A by
Assume that for
, the vectors
Deduce that, the rank of A is equal to
Denote by
Using Lemma 5.1 to see that a test point z coincides with one of the positions
We can form an image of the locations
To better explain the above algorithm, we take into account the observation time interval and the finite number of equidistantly distributed source points
to perform the calculation of the (SVD) of the matrix A (defined by the pattern
) and the decomposition of the matrix C. We then fix the arbitrary vector
to an element of the canonical basis
in
or equal to a linear combination between its elements. Therefore, the plots of the identifier of interest
are expected to illustrate the result indicating that sharp peaks should occur at the inhomogeneities locations.
5.2. Numerical results
We present some numerical results for locating two or three inhomogeneities, but our procedure remains valid to locate any finite number m of inhomogeneities. Our results are inspired from the series of numerical experiments for a heat equation found in [Citation8]. We suppose that Ω is a unit disk in centred at the origin, and we assume that we know the values
of the pattern
for some positive T and for a small finite number of equidistantly distributed source points
. Let
Then, for
we may set
We assume that the viscosity of the background medium is
, while the viscosities
of the inhomogeneities
are equated to 3. All inhomogeneities are of common diameter
. Notice that the retrieval of the inhomogeneities involves the calculation of the (SVD) (with
) of the matrix
and the decomposition of the matrix C. For a sampling step h = 0.03 and according to different discrete locations
, we subsequently calculate the identifier of interest
, where
.
5.2.1. Two inhomogeneities
In the first numerical experiment, we take two homogeneous disks and
, respectively, centred at
and
, to be retrieved using n = 10 source points. Let
, and
. Then the plots of
illustrate the results, where sharp peaks are expected to occur at the locations
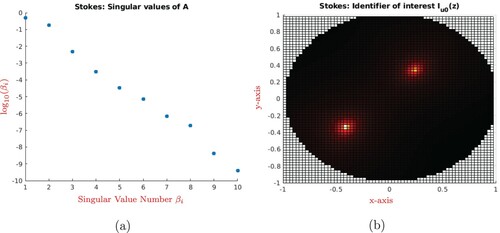
(j = 1, 2) of the inhomogeneities. We notice that there are two cases of interest:
and
.
For the case we choose
and T = 1. The singular values are displayed in Figure (a) while the identifier of interest
is displayed in Figure (b). The image is obtained by using the first 4 largest singular vectors associated, of course, with the 4 largest singular values of the matrix A, respectively. The gaps in the representation of the singular values of A are not as distinct as in [Citation4], however the two inhomogeneities are clearly discriminated from the background in 5.1(b). Their exact visual aspect depends on the choice of u0.
Figure 1. T = 1, : (a) distribution of the singular values of A for n = 10 source points; (b) gloss level map of
,
, for
.
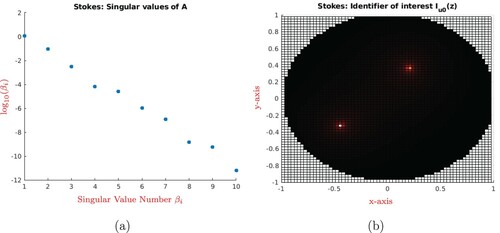
For the case we choose
and T = 3. In Figure (a), we see the distribution of the singular values of the matrix A. Figure (b) shows the identifier of interest
, where the image is again obtained by using the first 4 largest singular vectors associated.
Figure 2. T = 3, : (a) distribution of the singular values of A for n = 10 source points; (b) gloss level map of
,
, for
.
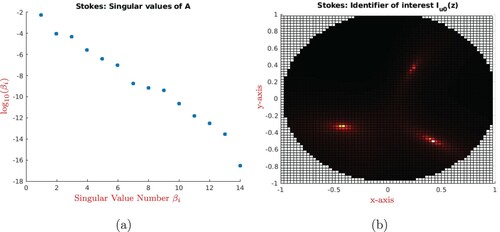
5.2.2. Three inhomogeneities
In the last numerical example, we add one more homogeneous disk with the same diameter
, centred at
and having the viscosity
. For
, T = 1, the results are shown in Figure where we get the distribution of the singular values of matrix A for 14 source points and the identifier of interest
for
. The image is obtained by using the first 6 largest singular vectors associated. The inhomogeneities are clearly discriminated from the background.
Figure 3. T = 1, : (a) distribution of the singular values of A for n = 14 source points; (b) gloss level map of
,
, for
.
Disclosure statement
No potential conflict of interest was reported by the authors.
Additional information
Funding
References
- Afraites L, Dambrine M, Eppler K, et al. Detecting perfectly insulated obstacles by shape optimization techniques of order two. Discrete Contin Dyn Syst Ser B. 2007;8(2):389–416, (electronic).
- Alvarez C, Conca C, Friz L, et al. Identification of immersed obstacles via boundary measurements. Inverse Probl. 2005;21:1531–1552.
- Ammari H, Garapon P, Kang H, et al. Effective viscosity properties of dilute suspensions of arbitrarily shaped particles. Asymptot Anal. 2012;80:189–211.
- Badra M, Caubet F, Dambrine M. Detecting an obstacle immersed in a fluid by shape optimization methods. Math Models Methods Appl Sci. 2011;21(10):2069–2101.
- Ben Abda A, Hassine M, Jaoua M, et al. Topological sensitivity analysis for the location of small cavities in Stokes flow. SIAM J Control Optim. 2009;48(5):2871–2900.
- Bonnetier E, Manceau D, Triki F. Asymptotic of the velocity of a dilute suspension of droplets with interfacial tension. Q Appl Math. 2013;71:89–117.
- Caubet F, Dambrine M. Localization of small obstacles in Stokes flow. Inverse Probl. 2012;28:105007.
- Ammari H, Iakovleva E, Kang H, et al. Direct algorithms for thermal imaging of small inclusions. Multiscale Model Simul: SIAM Interdisciplinary J. 2005;4:1116–1136.
- Ammari H, Garapon P, Kang H, et al. A method of biological tissues elasticity reconstruction using magnetic resonance elastography measurements. Q Appl Math. 2008;66:139–175.
- Daveau C, Douady DM, Khelifi A, et al. Numerical solution of an inverse initial boundary-value problem for the full time-dependent Maxwell's equations in the presence of imperfections of small volume. Appl Anal. 2013;92(5):975–996.
- Daveau C, Khelifi A, Balloumi I. Asymptotic behaviors for eigenvalues and eigenfunctions associated to Stokes operator in the presence of small boundary perturbations. J Math Phys Anal Geom. 2017;20:13.
- Ikehata M. Reconstruction of inclusion from boundary measurements. J Inverse Ill-posed Probl. 2002;10(1):37–66.
- Jackson NE, Tucker CL. A model for large deformation of an ellipsoid droplet with interfacial tension. J Rheol. 2003;47:659–682.
- Maatoug H, Rakia M. Topological asymptotic formula for the 3D non-stationary Stokes problem and application. Revue Africaine de la Recherche en Informatique et Mathématiques Appliquées, INRIA, 2020, Volume 32 - 2019–2020. hal-01851477v2.
- Daveau C, Luong THC. Asymptotic formula for the solution of the Stokes problem with a small perturbation of the domain in two and three dimensions. Complex Var Elliptic Equ. 2014;59(9):1269–1282.
- Bonnetier E, Triki F. Asymptotics in the presence of inclusions of small volume for a conduction equation: A case with a non-smooth reference potential. AMS, Contemp Math Ser. 2009;494:95–112.
- Kwon O, Seo JK, Yoon JR. A real-time algorithm for the location search of discontinuous conductivities with one measurement. Commun Pure Appl Math. 2002;55:1–29.
- Beilina L, Klibanov MV. A globally convergent numerical method for a coefficient inverse problem. SIAM J Sci Comput. 2008;31(1):478–509.
- Beilina L, Klibanov MV, Kokurin MY. Adaptivity with relaxation for ill-posed problems and global convergence for a coefficient inverse problem. J Math Sci. 2010;167:279–325.
- Bellassoued M, Imanuvilov O, Yamamoto M. Carleman estimate for the Navier–Stokes equations and an application to a lateral Cauchy problem. Inverse Probl. 2016;32(2):025001, 23 pp.
- Choulli M, Imanuvilov OY, Puel J-P, et al. Inverse source problem for linearized Navier–Stokes equations with data in arbitrary sub-domain. Appl Anal. 2013;92(10):2127–2143.
- Boyer F, Fabrie P. Mathematical tools for the study of the incompressible Navier–Stokes equations and related models. New York (NY): Springer; 2013. (Applied mathematical sciences; vol. 183).
- Ladyzhenskaya OA. Mathematical theory of the viscous incompressible id. Moscow: Fizmathiz; 1961. p. 203
- Temam R. Navier–Stokes equations. Providence (RI): AMS Chelsea Publishing; 2001, Theory and numerical analysis, Reprint of the 1984 edition.
- Ammari H, Iakovleva E, Kang H. Reconstruction of a small inclusion in a two-dimensional open waveguide. SIAM J Appl Math. 2005;65(6):2107–2127.
- Cheney M. The linear sampling method and the MUSIC algorithm. Inverse Probl. 2001;17:591–595.
- Kirsch A. The MUSIC algorithm and the factorisation method in inverse scattering theory for inhomogeneous media. Inverse Probl. 2002;18:1025–1040.