

Abstract
The article is devoted to the construction of the motion model for agents with memory. Agents can be interpreted, for example, as mobile robots or soldiers. Agents move on the landscape consisting of squares with different passability. The model is based on the cellular automaton with one common to all agents layer corresponding to the landscape and many agent-specific layers corresponding to an agent’s memory. Methods for the random landscape generation are developed. The dependence between configuration entropy of the landscape, efficiency of the path-finding algorithm based on the cellular automaton was found. Also, the dependence of the average speed of the agents’ motion on the landscape configuration entropy was shown.
Graphical Abstract
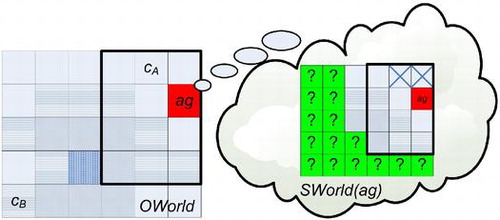
The agent ag, moving on the landscape OWorld from the cell to the cell
, and finding a locally optimal route in the neighborhood
. For example, the radius o can coincide with a range of sensors of the robot, a layer of the objective reality OWorld can be the robot’s environment. In this case, a layer of subjective reality SWorld will correspond to the stored in the robot’s memory representation of the explored area. Increasing of the function of obstacles is indicated with a darker tone, crosses ‘
’ in the layer SWorld mark already visited cells, marks ‘?’ correspond to cells whose status is unknown.
Notes
No potential conflict of interest was reported by the author.