

ABSTRACT
This article studies the problem of painting of a rectangular region cluttered with horizontal obstacles, by a swarm of mobile robots. Initially, the robots are deployed randomly within the target area. From the initial configuration, the robots are assembled on the left boundary of the region. Upon assembling on the left boundary, the robots first explore the entire area collectively to make a virtual partition of it and then collectively paint the target region in a subsequent phase. The proposed algorithm assumes that robots work in look–compute–move model. The robots follow a completely distributed algorithm to paint the region. The robots are either synchronous or semi-synchronous. The outcome of the proposed algorithm is a complete painting of an area without any repetition and collision.
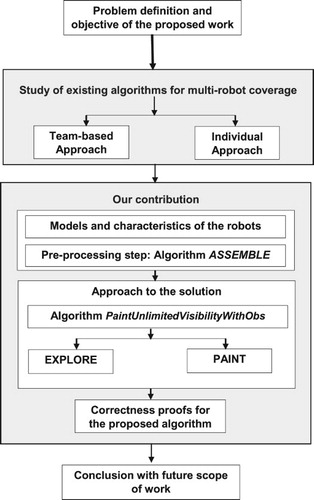
GRAPHICAL ABSTRACT
Disclosure statement
No potential conflict of interest was reported by the author(s).