

ABSTRACT
The design and control of the 2DoF Ball Balancer system is presented in this work. The ball balancer is a feedback-based underactuated system that is nonlinear, multivariate, and electromechanical. The proportional derivative (PD) controller is optimized by using Bat Algorithm, Particle Swarm Optimization, and Flower Pollination Algorithm in this research. By regulating the plate inclination angle, the suggested controller accomplishes self-balancing control for a ball on the plate. The modelling of the ball balancer system is accomplished using a 2DoF ball balancer system. In addition, Bat Algorithms, Particle Swarm Optimization, and the Flower Pollination Algorithm are used to analyze the state of a process autonomously. The system's model is created using MATLAB/Simulink approaches, and the results present the system with a steady and controllable output for ball balancing and plate angle control.
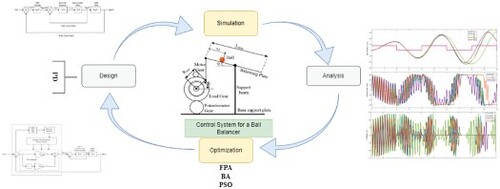
Graphical abstract
The author control the position of the ball balancer by using the PD controller and optimized the parameter of the controller through FPA, BA, and PSO.
Disclosure statement
No potential conflict of interest was reported by the author(s).