
Abstract
Purpose
The predicted global labor shortages and health problems for long-term care workers can be addressed by care robots. We have developed a smart transfer-assistive robot with dual arms to assist in patient transfers. This study aims to evaluate the effectiveness and usability of a transfer-assistive robot with dual arms for long-term care workers in the Living Lab of Kyung Hee University.
Methods
Long-term care workers (N = 15) transferred healthy adults using the transfer-assistive robot and subsequently reported the workload differences of manual care and the transfer-assistive robot, as measured by the Borg rating of the perceived exertion scale (RPE) and the NASA Task Load Index (NASA-TLX). They also completed questionnaires on the usability of transfer-assistive robots and open-ended interviews. The RPE and NASA-TLX values for each task were compared using the Wilcoxon signed-rank test, and descriptive statistics were used to calculate demographics and usability.
Results
The RPE scale indicated that the perceived physical burden was significantly reduced when using the transfer-assistive robot compared with the manual method. The robot-aided transfer method significantly reduced the physical demand in the NASA-TLX subscales. In the usability test, the averages for safety, operability, and satisfaction were all three points or higher, indicating a positive result.
Conclusion
This study demonstrates that a transfer-assistive robot has the potential to reduce physical stress and the risk of work-related musculoskeletal disorders in long-term care workers. This study shows that the robot is effective for long-term care workers suffering from the burden of the transferring/lifting action, emphasizing the need to introduce a transfer-assistive robot into the care field in South Korea.
IMPLICATIONS FOR REHABILITATION
Transfer-assistive robots are expected to alleviate the burden of transferring and lifting actions for long-term care workers.
These results emphasize the need to introduce transfer-assistive robots in the care field.
Ongoing attention to the usability study of transfer-assistive robots may be valuable in improving the work environment of long-term care workers and the quality of care services provided to care receivers.
Introduction
Labor shortages in the long-term care sector represent a global challenge [Citation1]. Among nations grappling with this issue, South Korea is anticipated to face the most acute labor shortages of care workers, attributed the elevated physical burdens and an aging workforce with an average age of approximately 58 years [Citation2]. In response to this pressing issue, South Korea initiated national R&D projects in 2019 aimed at developing care robots to reduce the physical burden on care workers [Citation3]. Notably, priority has been given to the development of transfer-assistive robots, leveraging advanced robotic technology to enable care workers to move older adults with minimal labor [Citation4].
Across the Organization for Economic Co-operation and Development (OECD) countries, more than 60% of long-term care workers report being exposed to physical risk factors at work, and approximately 46% report being exposed to mental health risk factors due to work overload [Citation1]. The most common causes of occupational accidents among long-term care workers are unbalanced and unreasonable actions when lifting and transferring patients, resulting in damage to the lower back, lumbar spine, and pelvis and musculoskeletal disorders in the lumbar region [Citation5]. To reduce the risk of injury to long-term care workers, various transfer-assistive equipment such as transfer belts, sliding sheets, sliding boards, and mechanical lifts have been developed. These devices relieve the physical burden of performing tasks but still require considerable force.
Biomechanical and intervention studies of transfer-assistive devices have shown reductions in biomechanical stress, lower back pain, injury rates, and worker compensation costs when using a transfer-assistive robot [Citation6–9]. Despite the results of the experiments, adopting these transfer-assistive devices in the care field remains low because of the uncomfortableness to use. Noble and Sweeney [Citation10] have found that the availability of such devices was very low, and the majority of respondents in their study agreed that the equipment was not easy to use. Even in Japan, where the development and supply of care robots are relatively active, the spread of transfer-assistive robots remains slow because of problems such as difficulty in operation, possibility of failure, and safety concerns [Citation11].
In the research on transfer-assistive devices [Citation6–9], the shapes and detailed functions of the devices are all slightly different, and all have limitations that it is difficult to use for users as care workers. Therefore, a usability study using a robot at the final stage that is developed and easy to use for the end user (care workers) is necessary. Our team has developed a smart transfer-assistive robot with dual arms, that is equipped with a smart sling on its arms, which eliminates the manual task of inserting and withdrawing a sling. Exchanging the sling is a task with a large physical load, and it is significantly important to determine whether the degree of physical burden is reduced through the smart sling. Additionally, it is necessary to examine the usability evaluation of care robots in the context of the Korean care market since Korea has a special feature of older care workers. Therefore, a usability study is essential to confirm the effectiveness of each developed robot to ensure safety, easy operation, high availability, and suitability for Korean care workers.
In this study, we analyze the usability of a smart transfer-assistive robot in a Living Lab. The Borg Rating of Perceived Exertion (RPE) scale [Citation12] and the NASA Task Load Index (NASA-TLX) [Citation13] are used to measure the subjective workload of care workers when performing transfer tasks. These evaluations allow us to provide a comprehensive assessment of the usefulness of the robot and identify areas for improvement [Citation14]. In addition, we evaluate usability more specifically by utilizing a usability index consisting of safety, operability, and satisfaction. This study aims to develop convenient and effective transfer-assistive robots through a usability evaluation and ultimately contribute to the quality of service of long-term care workers by widely accepting robots in the care market.
Methods
Participants
This study and its procedures were approved by the Institutional Review Board of Kyung Hee University (IRB no: KHGIRB-21–376). All the participants provided written informed consent prior to their participation in the study.
Fifteen long-term care workers were recruited via flyers placed at nursing home S in Suwon, South Korea. Interested participants contacted the study team and were screened for initial eligibility. The inclusion criteria for long-term care workers were (1) having more than one year of experience caring for bedridden patients, (2) being over 40 years old, (3) working in nursing homes, and (4) being able to actively participate in all step procedures. All participants were women, as this is the dominant gender for long-term care workers in South Korea. Men account for only 5% oflong-term care workers according to the National Health Insurance Service [Citation15]. Based on our convenience sampling method, it was difficult to recruit male participants for this study. In addition, with the purpose of generalization to verify the effectiveness according to the current population of care workers, we continued with the composition of women.
Four healthy adults were recruited to serve as the patients in this study. Due to the COVID-19 pandemic, it was difficult to recruit actual patients from nursing homes. In addition, this was the first study of transfer-assistive robots using humans; therefore, we recruited students from the College of Physical Education who could safely land and recover in the case of a fall or injury. The four students (‘patients’) were men, over 20 years old, and physically healthy, and they boarded the robot’s sling after receiving preliminary training regarding the robot (age:25.7 ± 2.7, height:169.9 ± 7.9, weight:74.9 ± 8.3).
Description of the smart transfer-assistive robot with dual arms
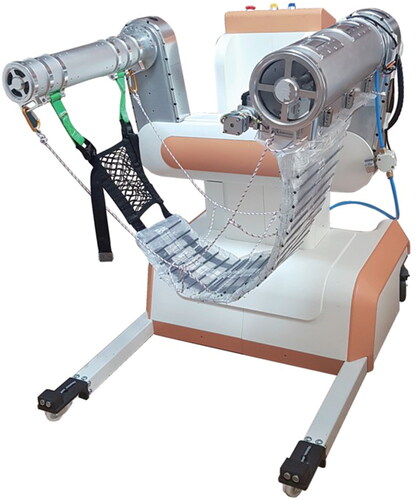
This study analyzes the effectiveness of the smart transfer-assistive robot with dual arms (). The robot was developed to reduce the physical burden on care workers and improve the quality of care services for patients. The robot is equipped with a smart sling that can be automatically and smoothly inserted under the patient’s body using a growth mechanism [Citation16]. A compact dual arm with five degrees of freedom based on a counterbalance mechanism lift lowers and transfers the patient from the bed to a wheelchair [Citation17,Citation18]. In addition, the handle of the robot detects the force of the care worker pushing the handle; therefore, the worker can easily and smoothly drive the robot with little force.
Figure 1. Prototype of the smart transfer-assistive robot with dual arms.
Experimental protocol
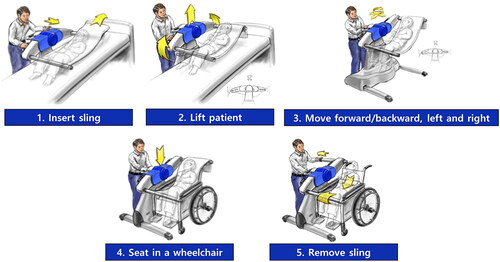
This study was conducted in the Living Lab of Kyung Hee University, where a nursing home environment was established. The study commenced after the participants provided written informed consent. Participants were briefed about the study and a basic pre-survey was conducted. Subsequently, the height and weight of the participants were measured, and the participants were instructed on how to use the transfer-assistive robot and the necessary safety precautions. The participant performed the task of transferring a healthy adult from a bed to a wheelchair three times using the transfer-assistive robot (see ). At the end of the experiment, the participants completed a post-survey.
Figure 2. The sequence of using a smart transfer-assistive robot with dual arms to transfer a person from a bed to a wheelchair.
Manual transfers were not used in the experimental protocol to minimize in-person contact as the experiment was conducted during COVID-19. Manual care was evaluated using a recall method as the long-term care workers who participated in this study mainly lifted and transferred patients manually in their daily work.
Surveys
Before the experiment, participants filled out the pre-survey form by providing details, including their age, gender, transfer lift experience, nursing experience, and daily working hours. After the experiment, the investigators asked the participants to complete the following surveys: (1) The Borg RPE scale [Citation12], (2) the NASA-TLX [Citation13], and (3) the usability index. Borg [Citation9] developed an RPE scale to evaluate the physical workload, which is the most widely used subjective workload evaluation method. The RPE has a score range of 6–20, with 6 representing minimum effort and 20 representing maximum effort. The NASA-TLX is a psychometric workload assessment test for evaluating subjective factors in six domains: mental demand, physical demand, temporal demand, performance, effort, and frustration [Citation13]. In the first step, the NASA-TLX is rated low/high and poor/good in 20 slots for the above six domains. The ratings on the scale are translated into a 100-point range using 5-point steps. In the second step, the six domains are paired two-by-two and the most important domain between the two is selected. Thus, the importance of the six criteria is determined accordingly. The score measured in Step 1 for a domain is then multiplied by the number of times the domain is selected in Step 2, and the sum is totaled to obtain the evaluation score. In this study, the raw scores (0–100 points) for each domain were compared. The usability index comprised 27 items, including 7 for safety, 9 for operability, and 11 for satisfaction, and all items were measured on a 5-point Likert scale. The usability index was modified to fit the transfer-assistive robot according to the senior-friendly product usability index of the Korea Health Industry Development Institute [Citation19]. After the questionnaires were administered, open-ended interviews were conducted with the participants.
Data analysis
Descriptive statistics, including means and standard deviations, were used to calculate the demographics of the participants and usability of the transfer-assistive robot. RPE and NASA-TLX scores were compared between the two transfer methods using the Wilcoxon signed-rank test for paired data comparisons. The level of significance was set at p < .05. All statistical analyses were performed using Stata 17.0 (StataCorp., College Station, TX, USA).
Results
Participant demographics
Fifteen long-term care workers participated in this study (). The participants were 59.8 ± 3.2 (mean ± standard deviation) years old, 156.4 ± 4.9 cm tall, and 56.7 ± 5.5 kg in weight. They had 147 ± 41.8 months of job experience; seven participants (46.6%) worked 8 h per day, and eight (53.4%) worked 12 h per day. All the participants were women.
Table 1. Participant (long-term care workers) demographics.
RPE
The RPEs of the participants while transferring the patient (a healthy adult performing the bedridden role) indicated that the mean RPE in manual transfers (12.13 ± 0.60) was significantly higher than that in the robot-assisted transfers (9.93 ± 0.63) (p < .05; z = 2.49) ().
Table 2. Mean (M), standard deviation (SD), effect size (z), and statistical significance (p) for the Borg Rating of Perceived Exertion (RPE) outcomes.
NASA-TLX
The NASA-TLX score for robot-assisted transfers was lower than that for manual transfers; however, the difference was not statistically significant (p = .23; z = 1.19). Robot-assisted transfers required significantly less physical demand than manual transfers (p < .01, z = 3.27). In contrast, robot-assisted transfers (37.67 ± 5.07) presented more frustration to complete than manual transfers (29.00 ± 4.96), but the difference was not statistically significant (p = .06; z = −1.86) ().
Table 3. Mean (M), standard deviation (SD), effect size (z), and statistical significance (p) for the NASA task Load index (NASA-TLX) outcomes.
Usability test
Safety
As shown in , the long-term care workers reported an average of 3.14 points for overall safety with the transfer-assistive robot. For each sub-item, the assembly and operation safety questions had higher scores than the average (3 points) because the assembly status of the lifter assistant robot was solid, and the operation status could be checked. The contact safety score was slightly lower than the average (3 points).
Table 4. Mean (M) and standard deviation (SD), and range for safety outcomes.
Operability
As shown in , the long-term care workers reported an average of 3.63 points for the overall operability of the transfer-assistive robot. For each subitem, the operability of the operation button was high, the lifting and lowering function performed well, and it was easy to position the patient for the robot. The ease of cleaning and storage was also higher than the average (3 points), but the assembly and dismantling of the sling were lower than the average (3 points).
Table 5. Mean (M) and standard deviation (SD), and range for operability outcomes.
Satisfaction
As shown in , the long-term care workers reported an average of 3.51 points for overall satisfaction with the transfer-assistive robot. For each sub-item, the control satisfaction was high; for example, the operation was intuitive, and the height was easy to adjust. Satisfaction with efficiency was also relatively high; for example, it was easy to learn how to operate the robot and change its battery. However, regarding emotional satisfaction, the size of the robot was lower than the average (3 points), and the design and stability of the sling were also slightly low.
Table 6. Means (M) and standard deviation (SD), and range for satisfaction outcomes.
Open-ended feedback
The results of the open-ended interviews were generally positive. Representative written responses to the question, ‘What is the difference when using the transfer-assistive robot compared to the manual method?’ included ‘less physically demanding as the sling is automatically inserted and retracted’, ‘no physical pain’, and ‘reduces the psychological burden’. Most of the participants reported that they were willing to use the transfer-assistive robot at their current facility and recommend it to others. They also suggested improvements, such as further reducing the size of the robot, increasing the width of the sling, and increasing the robot’s speed.
Discussion
This study aims to identify the effectiveness and usability of a transfer-assistive robot for caregivers, which may reduce the workload of long-term care workers and prevent musculoskeletal pain and injuries. We measured the workload when care workers transferred patients using manual and transfer-assistive robot transfer methods. We used the NASA-TLX tool to measure the multidimensional workload and the RPE to measure the physical workload.
The results of the RPE and NASA-TLX analyses indicated that using the transfer-assistive robot may help reduce the physical demand associated with transferring patients from a bed to a wheelchair. In addition, although the difference was not statistically significant, according to the NASA-TLX scores, the workload, mental demand, temporal demand, performance, and effort needed was lower for care workers when the transfer-assistive robot was used. This may be because the smart sling and electric-motion technology of the transfer-assistive robot reduced the physical demands of positioning the sling and transferring the patients.
However, robot-assisted transfers were more frustrating than manual transfers, and the mental demand, temporary demand, and effort domain scores were slightly higher. These results emphasize that the robots’ design should be improved to reduce frustration by increasing the sense of efficacy through ensuring an easy manipulation method and reducing the mental burden and effort needed to use the robot. Furthermore, it is necessary to train and educate long-term care workers to become familiar with the transfer-assistive robots’ operation and handling, as these results might be related to user proficiency. These results suggest that a follow-up study is required to further evaluate transfer-assistive robots in long-term experiments that include educational processes for care workers. In addition, it is necessary to evaluate the user experience for long-term use and compare the initial and long-term use results.
Subsequently, a usability test was conducted. In this test, the following three categories were measured: safety, operability, and satisfaction. The averages of safety, operability, and satisfaction in this study were 3 points or higher, indicating a generally positive usability result. In the case of safety, the assembly and operation safety items scored 3 or higher; however, contact safety items scored lower than 3 points. Because patients with bedsores have sensitive skin, both the care worker and patient should be careful not to rub the sensitive skin against the assistive robots. Therefore, future studies should supplement the usability of the robot’s materials and the assembly of its contact parts. Regarding operability, the operation button scored highly, the lifting and lowering function performed well, and fixing the patient to the robot was easy. However, the convenience of cleaning and storage, as well as the assembly and disassembly of the sling, requires improvement. Regarding satisfaction, control satisfaction was high (e.g., intuitive operation and easy height adjustment), and efficiency satisfaction was relatively high (e.g., easy operation learning and easy battery change). However, the size, design, and safety of the sling require improvement; through open feedback, the participants outlined that reducing the size of the robot and increasing the width of the sling are necessary for convenient use, even in narrow facilities, and for patient safety.
Based on the results of this study, the use of transfer-assistive robots is expected to reduce the burden on care workers. However, floor lifts are not well distributed in the care field in Korea, and most care workers use manual transfer methods [Citation20]. Therefore, for a transfer-assistive robot to operate effectively in the care field, it is important to develop a user-centered product by conducting usability evaluations that target actual users, such as care workers. Further studies regarding the usability of transfer-assistive robots may provide valuable support in the reduction of the burden on care workers and the activation of assistive robots. In addition, we expect that these transfer-assistive robots will improve the work environment of long-term care workers and the quality of care services provided to patients.
The limitations of this study were as follows. First, we conducted experiments in a Living Lab, not at a nursing home; this was because researchers could not enter a nursing home during the COVID-19 pandemic. Although the Living Lab is similar to a nursing home, it had limitations that differed from the actual use effect in the field. Second, this study did not include patients in nursing homes who were end users. Therefore, future studies should be conducted in actual nursing homes and include care workers and patients living in nursing homes. Finally, the participants in this study consisted only of women since Korean long-term care workers are predominately women. Further studies are required to verify the effectiveness of transfer-assistive robots for male care workers.
Conclusion
Long-term care workers reported a significant reduction in physical demand and perceived exertion with using transfer-assistive robots to transfer patients from a bed to a wheelchair than compared to manually transferring patients. In addition, workers positively evaluated the usability of the transfer-assistive robot. These results indicate that the transfer-assistive robot is an effective assistive technology for care workers who suffer from the burden of transferring/lifting actions. Therefore, introducing a transfer-assistive robot in the care field is crucial. However, this study only considered long-term care workers, and further studies are required to identify the effectiveness of transfer-assistive robots from the perspective of patients.
Disclosure statement
No potential conflict of interest is reported by the author(s).
Data availability statement
The data supporting this study’s findings are available from the corresponding author upon reasonable request.
Additional information
Funding
Notes on contributors
Young Sun Kim
Young Sun Kim is a professor in the Department of Gerontology and director of the New Aging Research Institute at Kyung Hee University. Her current research interests include AgeTech-Service, empirical research on care robots, and aging policy.
Hye Ri Shin
Hye Ri Shin is an assistant professor in the Department of Gerontology at Kyung Hee University. Her current research interests include AgeTech-Service, empirical research of older adults, social policy, and long-term care.
Hee Jeong Yoon
Hee Jeong Yoon is a Ph.D. candidate in the Department of Gerontology at Kyung Hee University. Her current research interests include AgeTech-Service, empirical research on care robots, and senior technology adoption.
Si Woo Ban
Si Woo Ban is a Ph.D. student in the Department of Gerontology at Kyung Hee University. Her current research interests include AgeTech-Service, empirical research on care robots, and the silver economy.
Young Gi Kim
Young Gi Kim is a Ph.D. candidate in the Department of Gerontology at Kyung Hee University. His current research interests include long-term care and housing for older adults.
Kwang Wook Jung
Kwang Wook Jung is a professor at Kumi University and CEO of Man&tel. Co. Ltd. His current research interests include mobile communications, the development of high-tech educational equipment, rehabilitation medical equipment, and exercise equipment for the older adults.
Hyunki In
Hyunki In is a senior researcher at the Center for Healthcare Robotics in Korea Institute of Science and Technology. He is interested in the development of care robots and wearable robots designed to assist the disabled and older adults.
References
- OECD. Who cares? Attracting and Retaining Elderly Care Workers for the Elderly. Paris: OECD Publishing; 2020.
- Kang EN, Lee YK, Im JM, et al. 2019 Long-term care survey. Policy report. Sejong: ministry of health and welfare. Sejong: Korea Institute for Health and Social Affairs. 2020. (No. 11-1352000-002743-12).
- Song WK, Shin JH, Kweon SC, et al. A study on the establishment of an action plan to establish a service base for care and rehabilitation technology including robot technology. Sejong: ministry of health and welfare. Seoul: National Rehabilitation Center. 2019. (No. 11-1352297-000322-01).
- Lim MJ, Song WK, Kweon H, et al. Care robot research and development plan for disability and aged care in KOREA: a mixed-methods user participation study. Assistive Technol. 2022;35(4):292–301. doi: 10.1080/10400435.2022.2038307.
- Son M, Jeon GS, Bae DC, et al. Trends of industrial injuries among long-term health care workers in Korea. KJOEM. 2021;31(2):156–172.
- Anyan W, Faraklas I, Morris S, et al. Overhead lift systems reduce back injuries among burn care providers. J Burn Care Res. 2013;34(6):586–590. doi: 10.1097/BCR.0b013e3182a2a8b7.
- Greenhalgh M, Blaauw E, Deepak N, et al. Usability and task load comparison between a robotic assisted transfer device and a mechanical floor lift during caregiver assisted transfers on a care recipient. Disabil Rehabil: assist Technol. 2020;17(7):833–839.
- Keir PJ, MacDonell CW. Muscle activity during patient transfers: a preliminary study on the influence of lift assists and experience. Ergonomics. 2004;47(3):296–306. doi: 10.1080/0014013032000157922.
- Vinstrup J, Jakobsen MD, Madeleine P, et al. Physical exposure during patient transfer and risk of back injury & low-back pain: prospective cohort study. BMC Musculoskelet Disord. 2020;21(1):715. doi: 10.1186/s12891-020-03731-2.
- Noble NL, Sweeney NL. Barriers to the use of assistive devices in patient handling. Workplace Health Saf. 2018;66(1):41–48. doi: 10.1177/2165079917697216.
- Iwakiri K, Takahashi M, Sotoyama M, et al. Usage survey of care equipment in care service facilities for the elderly. Sangyo Eiseigaku Zasshi. 2007;49(1):12–20. doi: 10.1539/sangyoeisei.49.12.
- Borg GA. Psychophysical bases of perceived exertion. MSSE. 1982;14(5):377–381.
- Hart SG, Staveland LE. Development of NASA-TLX (task load index): results of empirical and theoretical research. Adv Psychol. 1988;52:139–183.
- Huggins A, Claudio D. A performance comparison between the subjective workload analysis technique and the NASA-TLX in a healthcare setting. IISE Trans on Healthc Syst Eng. 2018;8(1):59–71. doi: 10.1080/24725579.2017.1418765.
- National Health Insurance Service. 2021 Long term care insurance statistical yearbook. Available from: https://kosis.kr/statHtml/statHtml.do?orgId=350&tblId=DT_35006_N038&conn_path=I2. [last. accessed 17 Jul 2023]
- Choi J, Lee S, Kim J, et al. Development of a pneumatically-driven growing sling to assist patient transfer. 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). 2020:8773–8780. doi: 10.1109/IROS45743.2020.9341706.
- Lee WB, Kim DW, Song JB. Novel 3-DOF counterbalance mechanism based on spring balancer for mobile robot arms. Mechatronics. 2022;82:102734. doi: 10.1016/j.mechatronics.2021.102734.
- Park HC, Ahn KH, Min JK, et al. 5 DOF home robot arm based on counterbalance mechanism. J Korea Robot Soc. 2022;15(1):48–54. doi: 10.7746/jkros.2020.15.1.048.
- Ryu JS, Park TS, Kim KH, et al. Senior-friendly product usability evaluation system and implementation plan. Cheongju: Korea Health Industry Development Institute. 2011. (No. 11-1352000-000249-01).
- Han KM, Kim YS, Shin HR. An exploratory study on intention to use assistive technology (at) for care workers taking care of bedridden patients. Korean JSoc Welf Stud. 2020;51(4):243–279.