
 ?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.
?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.Abstract
Background
When selecting a manual wheelchair frame, the choice between rigid and folding frames carries significant implications. Traditional folding frames are expected to have more rolling resistance and power dissipation caused by frame deformation, while they are more convenient for transportation, such as in a car. A new hybrid frame, designed to be more rigid, aims to minimize power dissipation while still retaining foldability.
Aim
This study aimed to assess rolling resistance, power output, propulsion technique and physiological demands of handrim wheelchair propulsion across three different frames: a rigid frame, a hybrid frame and a conventional folding frame.
Materials and Methods
Forty-eight able-bodied participants performed coast-down tests using inertial measurement units to determine rolling resistance. Subsequently, four-minute submaximal exercise block under steady-state conditions at 1.11 m/s were performed on a wheelchair ergometer (n = 24) or treadmill (n = 24) to determine power output, propulsion technique and physiological demands.
Results
Repeated measures ANOVA revealed that the hybrid frame exhibited the lowest rolling resistance (7.0 ± 1.5N, p ≤ 0.001) and required less power output (8.3 ± 1.0W, p ≤ 0.001) at a given speed, compared to both the folding (9.3 ± 2.2N, 10.8 ± 1.4W) and rigid frame (8.0 ± 1.9N, 9.4 ± 1.6W). Subsequently, this resulted in significantly lower applied forces and push frequency for the hybrid frame. The folding frame had the highest energy expenditure (hybrid: 223 ± 44 W, rigid: 234 ± 51 W, folding: 240 ± 46 W, p ≤ 0.001).
Conclusion
The hybrid frame demonstrated to be a biomechanically and physiologically beneficial solution compared to the folding frame, exhibiting lower rolling resistance, reduced power output, and consequently minimizing force application and push frequency, all while retaining its folding mechanism.
IMPLICATIONS FOR REHABILITATION
A hybrid frame, developed as an intermediary solution between a folding and rigid frame, presents reduced biomechanical and physiological demands compared to a folding frame. This is attributed to its decreased need for propulsive forces and energy expenditure, resulting from lower rolling resistance
Despite the hybrid frame offering lower rolling resistance and thus requiring less propulsive force as the rigid frame, it experiences internal power losses due to movement between its interconnected pieces. Consequently, the net mechanical efficiency of the hybrid frame is inferior to that of the rigid frame, resulting in a similar energy expenditure between the hybrid and rigid frames.
The hybrid frame emerges as a potentially more advantageous option than a conventional folding frame, as it diminishes biomechanical and physiological strain while retaining a folding mechanism, to ensure easy transportation.
Introduction
In the Netherlands, around 150.000 persons with reduced lower-limb function depend on a manual wheelchair for their daily mobility [Citation1]. Wheelchairs should fulfill the needs and goals of the person using it, such as comfort, stability and mobility. Different wheelchair designs all have their own benefits, and the eventual design is often the best compromise between various user requirements [Citation2]. Reducing rolling resistance is one essential requirement for increasing mobility, because it lessens the necessary work required to cover a certain distance, thus reducing the physical strain of manually propelling a wheelchair [Citation3–6].
Daily wheelchairs are mostly manually propelled hand rim wheelchairs and can be rigid or folding. The folding frame may offer greater convenience for transportation, such as in a car, compared to a rigid frame [Citation7]. However, the traditional frontal folding mechanism adds mass to the wheelchair frame, implying increased rolling resistance (Fdrag) and inertia. Moreover, the folding frame is less rigid, which is thought to increase internal energy loss due to frame deformation, further raising the required work to travel a given distance () [Citation8]. In contrast, the rigid frame usually has lower mass and a stiffer design, presumably reducing power loss. Nevertheless, it lacks a folding mechanism, which possibly reduces its transportability.
Figure 1. An overview of mechanical power balance based on van der woude et al. [Citation8] and van Inge Schenau and Cavangh [Citation9]. frictional power (Pdrag) consists of rolling resistance (Proll), internal friction (Pint), air resistance (Pair) and losses due to inclination (Pincl). Frictional power can be determined with a coast-down or drag test. The type of frame not only influences frictional power but also has the potential to impact internal power loss (Ploss), particularly through factors such as frame deformation, which occurs exclusively during propulsion. The difference between Pdrag and Pout determines displacement, velocity and acceleration.
![Figure 1. An overview of mechanical power balance based on van der woude et al. [Citation8] and van Inge Schenau and Cavangh [Citation9]. frictional power (Pdrag) consists of rolling resistance (Proll), internal friction (Pint), air resistance (Pair) and losses due to inclination (Pincl). Frictional power can be determined with a coast-down or drag test. The type of frame not only influences frictional power but also has the potential to impact internal power loss (Ploss), particularly through factors such as frame deformation, which occurs exclusively during propulsion. The difference between Pdrag and Pout determines displacement, velocity and acceleration.](/cms/asset/3a48c784-5c79-47b5-8db6-3edd73ced3d8/iidt_a_2365270_f0001_c.jpg)
There is limited research on the effect of wheelchair frame type on mechanical and physiological demands. Previous research showed that propelling a folding frame, reduces oxygen uptake per meter travelled when compared to propulsion in a rigid frame [Citation9]. However, the impact of wheelchair frame type on rolling resistance, power production, propulsion technique, and mechanical efficiency has not been previously examined. Solving this research gap could provide valuable insights into the differences in mechanical and physiological demands.
A hybrid frame has recently been developed, featuring a folding mechanism that rotates in the transverse plane (as described in ), instead of in the conventional frontal plane. This design claims to offer increased rigidity. While this innovative hybrid frame incorporates additional components for assembly, it is lighter compared to the conventional folding frame. Whether this hybrid frame matches the advantages of the rigid frame in terms of rolling resistance, power production, propulsion technique, and physiological demands remains unknown.
Table 1. Wheelchair frame types.
Therefore, the aim of this study was to examine rolling resistance, power output, propulsion technique, and physiological demands in handrim wheelchair propulsion across three frames: a rigid frame, a new hybrid frame and a conventional folding frame. It was hypothesized that the hybrid frame would yield an intermediary solution between the rigid and folding frames, in terms of rolling resistance, power output, propulsion technique, and physiological demands. This expectation was based on the hybrid frame’s reduced mass and increased rigidity compared to the folding frame, while still being less rigid than the traditional rigid frame. The rigid frame was expected to exhibit the lowest rolling resistance and require lowest power output, with less propulsive force and lower push frequency, consequently leading to the lowest energy expenditure. Additionally, due to minimal loss of power resulting from frame deformation, it was expected to exhibit the highest mechanical efficiency. In contrast, the folding frame was expected to show higher rolling resistance and power output, necessitating greater propulsive force and a higher push frequency, thereby leading to higher physiological demands.
Methods
Participants and design
The experiment included forty-eight able-bodied participants, with no prior wheelchair propulsion experience. Recruitment was split between two locations in the Netherlands: Reade, center for rehabilitation & rheumatology, in Amsterdam (n = 24) and University Medical Centre Groningen (UMCG) in Groningen (n = 24). Participants were excluded if they were not aged between 18 and 65 years, reported discomfort in their upper extremities, had cardiovascular contraindications for exercise, suffered from progressive diseases, were pregnant, or had diabetes.
The protocol received approval from ethical committees at the University Medical Center Groningen (Groningen, The Netherlands) (15993) and the Faculty of Behavioural and Movement Sciences at VU university (Amsterdam, The Netherlands) (VCWE-2022-171). Written informed consent was obtained from all participants.
Wheelchairs
The protocol was executed using three different wheelchairs, all from the same manufacturer (Permobil, Stockholm, Sweden). The wheelchairs were supplied in a standard configuration to reduce variability between the three frame types as much as possible. A professional in wheelchair fitting ensured that the wheelchairs were standardized to the greatest extent possible, aligning them to identical settings. These wheelchairs included a rigid wheelchair frame (Permobil Progeo Joker), a hybrid frame (Permobil Progeo Ego) and a conventional folding frame (Permobil Progeo Exelle) ( and ). Identical wheels (i.e. 24 inch ultralight Progeo, aluminum handrim and high pressure tire, Schwalbe, Right Run) and high density, molded foam cushions (i.e. the Curve, Comfort Company, New Berlin, WI, USA) were used during the tests. Except for variations in folding system, mass and wheelbase (i.e. distance between rear wheels and casters), all other wheelchair configurations were kept identical among frames ().
Table 2. Wheelchair characteristics after standardization.
Weight distribution for each frame-type was assessed using a force plate on an instrumented treadmill (C-Mill, Motek Medical B.V., Houten, The Netherlands). This test was conducted with each chair, once empty and once with a dummy (67.6 kg). The dummy mass was placed on the seat, against the backrest, and on the footplate to mimic a realistic body weight distribution. Weight distribution was determined by the location of the center of pressure between the wheelbase length, in percentage of load on the rear wheels. Averages of both percentages of the empty and dummy weight distribution tests were calculated (). The weight distribution for the empty and dummy test were respectively 76.8 and 79.1% for the rigid frame, 76.9 and 81.2% for the hybrid frame, and 69.2 and 75.2% for the folding frame.
Protocol and data analysis
shows the experimental protocol with three frames, which were provided to the participants in a counterbalanced order. To familiarize themselves with hand rim wheelchair propulsion, individuals engaged in a five-minute practice session of overground propulsion using each frame. Prior to measurements, individual characteristics such as age, body mass and height were recorded.
Figure 2. The study protocol at both locations: Amsterdam (A) and Groningen (G). The practice period took approximately 5 min per wheelchair. The submaximal test, conducted on an ergometer or treadmill, consisted of 4-min of continuous propulsion.
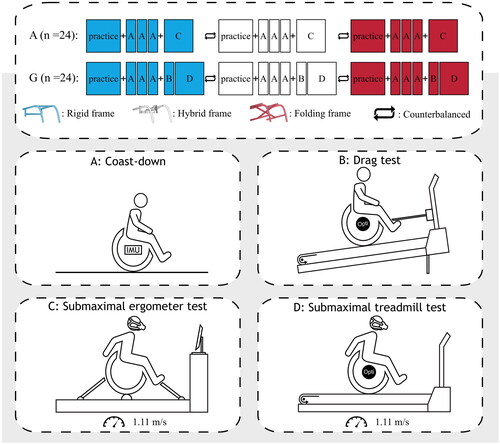
Twenty-four participants completed two tests with each wheelchair: a coast-down test and a submaximal propulsion test on a wheelchair ergometer (, group A, panel a and c) (Esseda, Lode B.V., Groningen, the Netherlands). The other twenty-four participants underwent three tests for each wheelchair: a coast-down test, a drag test and a submaximal propulsion test on a treadmill (, group G, panel a, b and d). All data analyses were conducted using Python 3.8.12 (Python software foundation) with the “Worklab: a wheelchair biomechanics mini-package” [Citation10].
Coast-down test (n = 48)
Coast-down tests were conducted to assess rolling resistance forces of the three wheelchairs () [Citation11]. Participants performed three coast-down trials per wheelchair on a tarpaulin surface. During each trial, the user pushed three times to reach a speed of approximately 2–2.5 m/s. Afterwards, the wheelchair user sat still, keeping their hands resting on their knees. Angular and linear velocity data were collected by three inertial measurement units (IMUs) (next-generation IMU, Bristol, UK), which were attached to each rear wheel hub and on the frame [Citation11,Citation12]. All IMU data were collected synchronously at 50 Hz via Wi-Fi. Deceleration () was determined by least square regression to fit a linear curve (EquationEquation (1)
(1)
(1) ), with intercept (
) and slope (
) over time (
), on all deceleration data between two manually determined points (approximately 0.2s after the last push termination and 0.2s before braking). Deceleration (
) was used to determine rolling resistance (
), using Newtons’ second law with mass (
) (EquationEquation (2)
(2)
(2) ), and to determine the rolling resistance coefficient (
) using EquationEquation (3)
(3)
(3) , with the gravitational constant (
).
(1)
(1)
(2)
(2)
(3)
(3)
Drag test on treadmill (n = 24)
The drag test was conducted on a 1.2 × 2.4 m motor-driven treadmill (ForceLink B.V., Culemborg, the Netherlands), to determine rolling resistance on the treadmill () [Citation2]. The drag test involved 10 steps, each of 0.5% inclination, ranging from 0.5% to 5%. In each step, inclination angles were measured using a digital inclinometer (Baseline®, White Plains, NY, USA). Force data were collected by attaching the wheelchair with a rope, parallel to the belt surface, to a force transducer on the front of the treadmill. During the drag test, the individuals were instructed to keep a steady passive posture, with their hands in their lap. For a more detailed explanation of the drag test, please refer to Van der Woude et al. (2001) [Citation2]. Average drag forces were calculated for each inclination step. Least square regression was applied, with intercept () and slope (
), to determine rolling resistance (
) at 0% treadmill inclination angle (
) for each participant and wheelchair (EquationEquation (4)
(4)
(4) ).
(4)
(4)
Submaximal test (n = 48)
Half of the group conducted a submaximal propulsion test on a dual-roller wheelchair ergometer () [Citation13]. The submaximal test consisted of 4-min propulsion on a velocity of 1.11 m/s and a set resistance, which was based on results of the coast-down trials on tarpaulin surface. Force and velocity data were continuously collected by the ergometer (100 Hz). Outcomes were calculated for the right and left wheel. The ergometer data were filtered with a 2nd order Butterworth filter with a 5 Hz cut-off frequency, and subsequently used to calculate power output and kinetic (i.e. mean tangential force, peak tangential force, net work per cycle and negative work per cycle) and temporospatial (push frequency, push time, recovery time and contact angle) propulsion technique parameters () [Citation14].
Table 3. Propulsion technique variables.
The other half of the group performed the 4-min submaximal propulsion test at a velocity of 1.11 m/s without inclination on the treadmill (). During the treadmill protocol, the right wheel was replaced by a measurement wheel equipped with 3D force sensors (OptiPush; MAX Mobility, Antioch, TN, USA) (200 Hz). The left wheel was replaced by a dummy wheel of identical mass. Force data from the Optipush were filtered using a 2nd order Butterworth filter with a 15 Hz cut-off frequency. Average power output and the above-mentioned propulsion technique parameters were calculated ().
During both submaximal tests, breath-by-breath open circuit spirometry was performed (K5 Cosmed, Rome, Italy), determining energy expenditure (EE, in W) [Citation15]. The gas analyzer was calibrated with a Jaeger 5-liter syringe, room air and a calibration gas mixture. Weighted averages of the last minute of each session were calculated when participants achieved steady-state submaximal exercise (respiratory exchange ratio <1.0). Since no resting metabolism was measured during this study, a value of 1 MET (1.16 W kg−1) was used to estimate resting metabolism [Citation16]. Netto Mechanical Efficiency (NME) was calculated by dividing power output by net EE, i.e. EE-1 MET [Citation17]. NME could provide extra insights into internal power losses due to frame deformation, that cannot be measured at the level of the handrim since these losses occur at the level of the frame. Since maintaining the predetermined velocity requires the wheelchair user to overcome these power losses, determining the mechanical efficiency could provide insight on these losses. Frame deformation is only applicable for frames with a folding mechanism, such as the hybrid and folding frame, and it could subsequently lower the NME.
To compute power output, propulsion technique variables, EE and NME during steady-state exercise, only data from the last minute of the measurement wheel, ergometer and spirometry were used for analyses.
Statistical analysis
All statistical analyses were conducted using IBM SPSS Statistics version 27 for Windows (SPSS Inc., Chicago, IL, USA). Repeated measures ANOVAs were utilized for each test outcome, with wheelchair type as within-factor, and location as between-factor. When the assumption of sphericity was violated, Greenhous-Geisser test results were analyzed. Subsequently, Least Significant Difference post-hoc tests (LSD) were performed for each parameter with a significant test result from the repeated measures ANOVA [Citation18]. Significance level was set at p < 0.05. To estimate the effect size, partial Eta squared , was used, which can be interpreted as small (≥0.01), medium (≥0.06) and large (≥0.14) [Citation19]. When a parameter was non-normally distributed, a Friedman test, with no between subjects’ factor, was performed with a non-parametric (Wilcoxon) post-hoc test. The effect size of the non-parametric Friedman test is represented as Kendall’s W value, which was interpreted as slight (0.0–0.2), fair (0.2–0.4), moderate (0.4–0.6), substantial (0.6–0.8) and almost perfect (0.8–1.0) agreement [Citation20].
Results
The total group (n = 48) consisted of 34 females and 14 males, with an average age of 26.7 (±11.8) years, height of 1.73 (±0.06) m, body mass of 73.3 (±8.3) kg, and BMI of 24.4 (±2.6) kg/m2.
Rolling resistance
Data of two coast-down tests and one drag test were missing due to technical errors. The results of the coast-down tests and drag test both showed that wheelchair type had a significant effect on rolling resistance (p ≤ 0.001, ≤0.605) (, , panel a and b). The post-hoc tests conducted for both the coast-down and drag tests revealed significant differences among all frame types, with the hybrid frame exhibiting the lowest rolling resistance and the folding the highest.
Figure 3. Boxplots present data with median and interquartile range. A & B: Rolling resistance, C: power output, D: Mean force per push, E: Push frequency, F: contact angle, G: Energy expenditure (EE) and H: Net mechanical efficiency (NME). All measures were significantly impacted by the wheelchair frames (p < 0.05). Outliers are denoted as (o). Significant post-hoc test (LSD) results are depicted as ([![]()
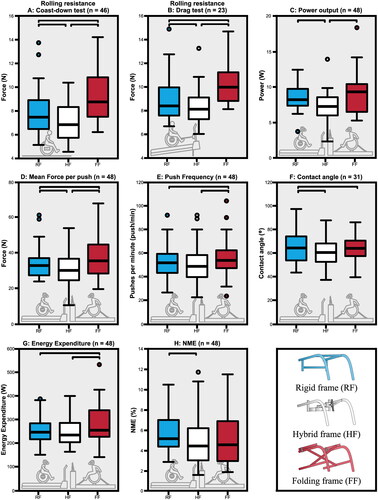
Table 4. Results of the repeated measures ANOVA for the propulsion technique variables of both the treadmill and wheelchair ergometer submaximal test (n = 48).
Power output and propulsion technique
Power output () during the submaximal tests showed a significant effect for frame type (p ≤ 0.001, =0.310). Post-hoc analyses indicated that power output of the rigid (8.6 ± 1.7W) and folding frame (9.0 ± 2.9W) was significantly higher than that of the hybrid frame (7.2 ± 2.1W).
All kinetic propulsion parameters were significantly influenced by frame type (p ≤ 0.016, ≥0.096) (). Post-hoc tests indicated that the mean () and peak forces per push for the rigid frame (24 ± 9 N, 57 ± 17 N) fell between those of the hybrid frame (31 ± 10 N, 52 ± 19 N) with the lowest forces, and the folding frame (36 ± 12 N, 61 ± 12 N) with the highest forces. Propulsion in the rigid frame was done with significantly more work per cycle (10.4 ± 3.7J) compared to the hybrid frame (8.8 ± 3.5J), whilst being comparable to the folding frame (10.1 ± 4.1J). The rigid frame (−0.7 ± 0.6J) was propelled with the least negative work per cycle, followed by the hybrid frame (−0.8 ± 1.1J) and the folding frame (−1.3 ± 1.3J).
Regarding temporospatial parameters, contact angle was not calculated for 14 subjects due to technical difficulties with the Optipush measurement wheel. The repeated measures ANOVA revealed a significant impact of frame type on all four temporospatial parameters (p ≤ 0.021, ≥0.084) (). Post-hoc analyses indicated that both the rigid frame (52 ± 14 push/min) and hybrid frame (51 ± 15 push/min) exhibited significantly lower push frequencies compared to the folding frame (55 ± 14 push/min) (). Push time was significantly higher in the rigid frame (0.31 ± 0.06s) compared to the hybrid frame (0.30 ± 0.05s), with neither showing a significant difference from the folding frame (0.31 ± 0.05s). Furthermore, post-hoc tests indicated that the recovery time during propulsion for the rigid frame (0.91 ± 0.28s) did not significantly differ from either the hybrid frame (0.98 ± 0.37s) or the folding frame (0.86 ± 0.30s). However, the recovery time of the hybrid frame was significantly longer than that of the folding frame. The contact angle was significantly higher for the rigid frame (65 ± 13°) compared to the hybrid frame (61 ± 12°) and folding frame (63 ± 11°), with the hybrid frame and folding frame not being significantly different from each other ().
Energy expenditure and mechanical efficiency
Both EE () and NME () were significantly influenced by frame type (p ≤ 0.007, ≤0.234). Post-hoc tests showed that using the rigid frame (248 ± 56 W) and the hybrid frame (251 ± 56 W), were not significantly different in terms of EE, with both requiring significantly lower EE compared to the folding frame (277 ± 74 W). Furthermore, post-hoc test results identified that for the NME, there was only a significant difference between the rigid frame (5.8 ± 2.0%) and the hybrid frame (4.9 ± 2.4%), with neither being significantly different from the folding frame (5.4 ± 2.8%).
Discussion
This study assessed rolling resistance, power output, propulsion technique and physiological demands of handrim wheelchair propulsion across three different frames: a rigid frame, a new hybrid frame and a conventional folding frame. Contrary to expectations, the hybrid frame showed reduced rolling resistance not only compared to the folding frame but also in comparison to the rigid frame. As a result of this lower rolling resistance, there were lower power output requirements for maintaining a predetermined speed. Furthermore, the hybrid frame’s lower power output resulted in the lowest mean force per push, peak force per push, work per cycle, push frequency (attributed to the longer recovery time), and smallest contact angle. Additionally, the hybrid frame resulted in similar energy expenditure as the rigid frame, where the folding frame resulted in the highest energy expenditure. However, net mechanical efficiency was lower in the hybrid frame compared to rigid frame, potential indicating a higher internal energy loss.
Rolling resistance is predominantly influenced by wheelchair characteristics, such as mass, weight distribution, and tires [Citation21,Citation22]. The rigid frame exhibited the lowest mass (10.9 kg), followed by the hybrid frame (12.4 kg), and folding frame (13.2 kg). Regarding weight distribution, both the rigid and hybrid frames adopted a more active design. For example, the rigid and hybrid frames have a one-piece footrest while the folding frame featured a more forwardly positioned two-piece footrest. This resulted in a greater load on the rear wheels (77 and 78%, respectively), potentially leading to reduced rolling resistance [Citation22]. The frames’ mass and weight distribution suggest minimal rolling resistance for the rigid frame [Citation4,Citation22,Citation23]. However, the hybrid frame demonstrated the least rolling resistance. Post-testing standardization checks identified 1 mm toe in for both wheels of the rigid frame. This suggests that, even after thorough standardization, a combination of minor wheelchair set-up differences could influence rolling resistance. It is possible that other small differences, unrelated to frame type, such as inefficient bearings, could also affect the rolling resistance of the frames [Citation24]. Moreover, even with the consistent frames’ center of gravity across trials, this may not account for the variation in the location of the center of mass of each individual.
As presented in the power balance model (), based on Van der Woude et al. [Citation25] and Van Ingen Schenau and Cavanagh [Citation26], a reduction in rolling resistance requires less power output. The current study found that differences between frame types in terms of power output align with observed differences in rolling resistances. The study of De Groot et al. [Citation27] emphasized that power output is accountable for differences in key propulsion factors such as mean force, work per cycle and push frequency. This aligns with the results of the current study, which found that the hybrid frame required the least power output and consequently exhibited the lowest force application and push frequency. Contrarily, the conventional folding frame required the highest power output, thus necessitating the highest force application and push frequency.
Moreover, Chénier and Aissaoui (2014) showed a negative relation between frame deformation (i.e. vibration transmissibility) and the required work per meter [Citation8], suggesting that a frame with a folding mechanism would require more power output to compensate for power losses due to frame deformation. The current study examined NME, since it includes the loss of power due to frame deformation that happens before power application at the handrim.
Moreover, NME amplifies the differences in EE attributable to the performed task, since it excludes resting metabolism [Citation17]. A lower NME suggests that there is extra energy expended for power output that could not be measured at the wheel (i.e., power loss due to frame deformation). As expected, the NME of the rigid frame was the highest (5.8%). The folding (5.4%) and hybrid (4.9%) frames resulted in a lower NME, of which only the hybrid was significantly lower compared to the rigid frame. This might indicate that for both folding frames there was power loss due to frame deformation during propulsion. Nonetheless, the hybrid frame still required less EE, due to the lower rolling resistance, compared to the folding frame.
While analyzing rolling resistance and mechanical and physiological strain during submaximal wheelchair propulsion provides valuable insights, it offers an incomplete overview of daily wheelchair usage. Future studies could enhance our understanding by investigating the differences in these frame types using a similar repeated measures design, focusing on other wheelchair tasks in daily life, such as sprinting ability and maneuverability. Additionally, evaluating the effort required to load the frames into a car could provide valuable insights into the overall quality of the new hybrid frame compared to both the rigid and folding frame.
Limitations
Although utmost care was paid to make sure that all wheelchairs used were in a standardized configuration, variations may exist among different frames of the same frame type. Minor differences in the manufacturing of parts or during assembly could impact resistance forces, thus influencing the mechanical and physiological strain of wheelchair propulsion. The current study utilized only one wheelchair for each of the three frame types included in the analysis. Yet, it was assumed that the differences between the frames in terms of manufacturing and assembly are neglectable, making the current study results generalizable. Nonetheless, for future studies, it might be beneficial to use multiple wheelchairs from the same frame type, to rule out differences that occur within the frame designs.
Secondly, the used frames were brand new, and alterations in frame rigidity and other sources of internal friction may occur after long-term use. Therefore, comparing wheelchair propulsion before and after a durability test (e.g., providing stress to the frames by for example mimicking propulsion cycles and curb-drops [Citation28]) could provide insight in how prolonged wheelchair use could alter physiological and mechanical demands. Rigid frames are proposed to be more durable as compared to folding frames [Citation24]. A reduction in rigidity, particularly for folding frames, could potentially lead to increased power dissipation through frame deformation. This, in turn, could necessitate higher power output, consequently increasing measures of mechanical and physiological strain.
Moreover, the wheelchair frames were propelled by all wheelchair users in a standardized configuration. This means that the frames were not individualized and, therefore, could not match all bodily proportions of the individuals, potentially affecting wheelchair propulsion biomechanics. Nonetheless, the body mass of 73.3 kg had a small standard deviation of 8.3 kg, and the height of the individuals, 1.73 m, had a standard deviation of only 0.06 m. Given these relatively small ranges of bodily proportions, it can be assumed that the effect of not individualizing the wheelchair frames to the users’ bodily proportions is minimal.
Lastly, the wheelchair frames were secured to the wheelchair ergometer using straps, ensuring a stable and stationary position for propulsion. Yet, this strapping mechanism increases the rigidity of the frames, as the straps exert an outward and downward force on the frame. Therefore, the differences observed in NME on the ergometer primarily depend on the predetermined rolling resistances specified for the protocol. Nevertheless, the results of both the ergometer and treadmill were combined in this study, and both showed the same trend. Therefore, it is possible that frame deformation still contributes to the required power output and NME.
Clinical implications
The hybrid frame resulted in the lowest rolling resistance and subsequently required the least power output and metabolic energy, compared to both the rigid and folding frames. This suggests that the wheelchair user could propel the wheelchair over a larger distance or for a longer duration with similar effort. Accessibility and wheelchair-dependent factors are associated with social and community participation [Citation29]. Furthermore, the hybrid frame was found to be more beneficial than the folding frame in in terms of both mechanical and physiological strain.
The folding frame resulted in the highest force application and push frequency, which contradicts clinical guidelines aimed at upper-limb preservation after spinal cord injury [Citation30]. The hybrid frame minimized force application and push frequency, potentially reducing mechanical loads on the upper extremities. Therefore, utilizing a frame type with lower rolling resistance, such as the hybrid frame, might be beneficial for upper-limb preservation and subsequently maintaining a higher quality of life and level of physical activity [Citation30,Citation31]. Moreover, the hybrid frame does not compromise the propulsion technique for transportability, as would be the case in a conventional folding frame.
Conclusion
The hybrid frame, designed as an intermediary solution between the rigid and folding frames, demonstrated the lowest rolling resistance and therefore required the least power output. This subsequently resulted in a less mechanically straining propulsion technique. In contrast, the folding frame exhibited the highest mechanical strain in terms of propulsion technique, possibly attributable to its increased rolling resistance and consequently higher power output requirement. In terms of physiological strain, the rigid and hybrid frames were comparable. While the hybrid frame was the least net mechanically efficient, suggesting power loss due to frame deformation, it resulted in a comparable amount of EE as the rigid frame. Similar to the mechanical strain, the folding frame also imposed the most physiological strain, resulting in the highest energy expenditure. This positions the hybrid frame as a compelling alternative to the conventional folding frame for wheelchair users.
Acknowledgment
First, the authors would like to thank all participants for their effort participating in the study. Second, they would like to thank Djarna Bijvoet, Amber Evers, Dionne Müller, Pieter Wijnhoven and Jelle Rozeboom for their help during the data collection.
Disclosure statement
Although there have been dialogues with employees from Permobil AB, they did not have any role in decisions with regards to the design of this study, data collection, analysis, interpretation of data or in the decision what to publish.
Data availability statement
Data is available on reasonable request.
Additional information
Funding
Notes on contributors
Jelmer Braaksma
Jelmer Braaksma is a Ph.D. student at the center of Human Movement Sciences at the University Medical center Groningen and University of Groningen in the Netherlands. The focus of his current studies mostly lie on affecting mechanical and physiological strain of manual wheelchair propulsion by using different modalities, such as folding wheelchair frames or pushrim-activated power-assisted wheels.
Riemer J. K. Vegter
Riemer J. K. Vegter is a human movement scientist, he obtained his PhD-degree on Wheelchair Skill Acquisition at the Faculty of Medical Sciences at the University of Groningen, The Netherlands in 2015. He currently holds a position as Assistant Professor at the University Medical Center Groningen (NL) and is Visiting Research Fellow at the School of Sport, Exercise and Health Sciences of Loughborough University (UK). He performs fundamental research on the biomechanics & physiology of cyclic upper-body exercise, applied to the optimization of motor skill acquisition and assistive technology, for (wheeled) mobility in the context of rehabilitation, daily living and paralympic sports. Dr. Vegter is member of Young Academy Groningen, International Society of Biomechanics in Sports, Society of Movement Analysis Laboratories in the low lands (SMALLL) and the Netherlands Society of Human Movement Sciences (former board member). He is also the chair of the RehabMove congress 2025 and has been guest editor for Disability & Rehabilitation and Frontiers in Rehabilitation Sciences.
Han Houdijk
Han Houdijk is a professor of Clinical Movement Sciences at Center for Human Movement Sciences, University Medical Center Groningen, University of Groningen, the Netherlands. After he received his Ph. D. degree, he worked as associate professor at the VU in Amsterdam and as head of the movement and exercise laboratory at Heliomare, Wijk aan Zee, the Netherlands. Currently he is Prof of clinical movement analysis at university medical center Groningen and he leads the Prosthesis Academy, University Medical and is actively involved at the International Society for Prosthetics and Orthotics (ISPO), Society for Movement Analysis Laboratories in the Low Lands (SMALLL) and the Focus group Exercise Physiology in Rehabilitation (AIRe).
Sonja de Groot
Sonja de Groot is a senior researcher at rehabilitation center Reade, Amsterdam, the Netherlands, & associate professor at the Department of Human Movement Sciences, Faculty of Behavioural and Movement Sciences, Vrije Universiteit, Amsterdam, the Netherlands. After receiving her Ph.D. degree, she worked as coordinator of the Dutch multi-center research programs “Restoration of mobility in SCI rehabilitation” and “Active LifestyLe Rehabilitation Interventions in persons with a chronic Spinal Cord injury (ALLRISC)”. Dr. De Groot’s current research interests include the study of spinal cord injury rehabilitation, exercise physiology, wheelchair and handcycle propulsion and configuration, and adapted sports.
References
- De Klerk, M. Meedoen met beperkingen: rapportage gehandicapten 2007. In: Sociaal en Cultureel Planbureau. 2007. https://repository.scp.nl/bitstream/handle/publications/907/Meedoen_met_beperkingen.pdf?sequence=1
- van der Woude LHV, Veeger HEJ, Dallmeijer AJ, et al. Biomechanics and physiology in active manual wheelchair propulsion. Med Eng Phys. 2001;23(10):713–733. doi: 10.1016/s1350-4533(01)00083-2.
- de Groot S, Vegter RJK, van der Woude LHV. Effect of wheelchair mass, tire type and tire pressure on physical strain and wheelchair propulsion technique. Med Eng Phys. 2013;35(10):1476–1482. doi: 10.1016/j.medengphy.2013.03.019.
- Ott J, Wilson-Jene H, Koontz A, et al. Evaluation of rolling resistance in manual wheelchair wheels and casters using drum-based testing. Disabil Rehabil Assist Technol. 2022;17(6):719–730. doi: 10.1080/17483107.2020.1815088.
- Sawatzky BJ, Kim WO, Denison I. The ergonomics of different tyres and tyre pressure during wheelchair propulsion. Ergonomics. 2004;47(14):1475–1483. doi: 10.1080/00140130412331290862.
- Mason BS, Lemstra M, van der Woude LHV, et al. Influence of wheel configuration on wheelchair basketball performance: wheel stiffness, tyre type and tyre orientation. Med Eng Phys. 2015;37(4):392–399. doi: 10.1016/j.medengphy.2015.02.001.
- Medola FO, Elui VMC, da Silva Santana C, et al. Aspects of manual wheelchair configuration affecting mobility: a review. J Phys Ther Sci. 2014;26(2):313–318. doi: 10.1589/jpts.26.313.
- Chénier F, Aissaoui R. Effect of wheelchair frame material on users’ mechanical work and transmitted vibration. Biomed Res Int. 2014;2014:609369–609312. doi: 10.1155/2014/609369.
- da Silva Bertolaccini G, Sandnes FE, Medola FO, et al. Effect of manual wheelchair type on mobility performance, cardiorespiratory responses, and perceived exertion . Rehabil Res Pract. 2022;2022:1–11. https://www.hindawi.com/journals/rerp/2022/5554571/.
- De Klerk R, Rietveld T, Janssen RJF, et al. Worklab: a wheelchair biomechanics mini-package. Zenodo; 2023. doi: 10.5281/zenodo.8362963.
- Rietveld T, Mason BS, Goosey-Tolfrey VL, et al. Inertial measurement units to estimate drag forces and power output during standardised wheelchair tennis coast-down and sprint tests. Sports Biomech. 2021;00:1–19. doi: 10.1080/14763141.2021.1902555.
- van der Slikke RMA, Berger MAM, Bregman DJJ, et al. From big data to rich data: the key features of athlete wheelchair mobility performance. J Biomech. 2016;49(14):3340–3346. doi: 10.1016/j.jbiomech.2016.08.022.
- de Klerk R, Vegter RJK, Veeger HEJ, et al. Technical note : a novel servo-driven dual-roller handrim wheelchair ergometer. IEEE Trans Neural Syst Rehabil Eng. 2020;28(4):953–960. doi: 10.1109/TNSRE.2020.2965281.
- Vegter RJK, de Groot S, Lamoth CJ, et al. Initial skill acquisition of handrim wheelchair propulsion: a new perspective. IEEE Trans Neural Syst Rehabil Eng. 2014;22(1):104–113. doi: 10.1109/TNSRE.2013.2280301.
- Garby L, Astrup A. The relationship between the respiratory quotient and the energy equivalent of oxygen during simultaneous glucose and lipid oxidation an lipogenesis. Acta Physiol Scand. 1987;129(3):443–444. doi: 10.1111/j.1365-201x.1987.tb10613.x.
- Hintzy F, Tordi N. Mechanical efficiency during hand-rim wheelchair propulsion: effects of base-line subtraction and power output. Clin Biomech. 2004;19(4):343–349. doi: 10.1016/j.clinbiomech.2004.01.001.
- Stainbsy WN, Gladden LB, Barclay JK, et al. Exercise efficiency: validity of base-line subtractions. J Appl Physiol Respir Environ Exerc Physiol. 1980;48(3):518–522. doi: 10.1152/jappl.1980.48.3.518.
- Day RW, Quinn GP. Comparisons of treatments after an analysis of variance in ecology. Ecol Monogr. 1989;59:433–463.
- Cohen J. Statistical power analysis for the behavioral sciences. 2nd ed. New York: Taylor and Francis; 1988.
- Landis JR, Koch GG. The measurement of observer agreement for categorical data; 1977. Available from: https://about.jstor.org/terms.
- Van Der Woude LHV, Geurts C, Winkelman H, et al. Measurement of wheelchair rolling resistance with a handle bar push technique. J Med Eng Technol. 2003;27(6):249–258. doi: 10.1080/0309190031000096630.
- Lin J, Huang M, Sprigle S. Evaluation of wheelchair resistive forces during straight and turning trajectories across different wheelchair configurations using free-wheeling coast-down test. J Rehabil Res Dev. 2015;52(7):763–774. doi: 10.1682/JRRD.2014.10.0235.
- Bascou J, Sauret C, Pillet H, et al. A method for the field assessment of rolling resistance properties of manual wheelchairs. Comput Methods Biomech Biomed Engin. 2013;16(4):381–391.
- Mclaurin CA, Brubaker CE. Biomechanics and the wheelchair. Prosthet Orthot Int. 1991;15(1):24–37. doi: 10.3109/03093649109164272.
- van der Woude LHV, de Groot G, Hollander AP, et al. Wheelchair ergonomics and physiological testing of prototypes. Ergonomics. 1986;29(12):1561–1573. doi: 10.1080/00140138608967269.
- van Ingen Schenau GJ, Cavanagh PR. Power equations in endurance sports. Biomechanics. 1990;23:865–882.
- De Groot S, Cowan RE, MacGillivray MK, et al. The effect of external power output and its reliability on propulsion technique variables in wheelchair users with spinal cord injury. IEEE Trans Neural Syst Rehabil Eng. 2022;30:296–304. doi: 10.1109/TNSRE.2022.3147689.
- Wang H, Liu HY, Pearlman J, et al. Relationship between wheelchair durability and wheelchair type and years of test. Disabil Rehabil Assist Technol. 2010;5(5):318–322. doi: 10.3109/17483100903391137.
- Smith EM, Sakakibara BM, Miller WC. A review of factors influencing participation in social and community activities for wheelchair users. Disabil Rehabil Assist Technol. 2016;11(5):361–374. doi: 10.3109/17483107.2014.989420.
- Boninger ML, Waters RL, Chase T, et al. Preservation of upper limb function following spinal cord injury: a clinical practice guideline for health-care professionals. J. Spinal Cord Med. 2005;28:433–470.
- Gutierrez DD, Thompson L, Kemp B, et al. The relationship of shoulder pain intensity to quality of life, physical activity, and community participation in persons with paraplegia. J Spinal Cord Med. 2007;30:251–255.