
ABSTRACT
Augmented feedback is a key component of motor skill learning. Feedback can provide information relating to the movement outcome (knowledge of results; KR) or information relating to a movement parameter (knowledge of performance; KP). The effect of KR on skill learning has been long studied, but it is unclear whether KP can supplement or substitute KR to enhance learning. The aim of this study is to compare the effect of KR with the effect of KP, and a combination of KR and KP, on motor skill learning. An electronic search was performed on Psychinfo, PubMed/MEDLINE, Scopus, and SportDiscuss databases. A total of 19 studies of mixed quality were included. The results showed that a combination of KR and prescriptive KP was superior to KR; prescriptive KP alone was superior to KR; and KR was superior to descriptive KP. We speculate that this finding supports the view that augmented feedback promotes motor learning when it facilitates a learner’s search for goal-relevant movement solutions. Considering the sample included, these results can be generalized only to novices. We encourage future research to examine how skill level and additional classification of KP interact with KR and KP on the learning process.
Introduction
Augmented feedback is a key component of motor skill learning, and a large body of research has investigated different strategies to effectively implement it in a learning design (Bilodeau, Citation1966; Magill & Anderson, Citation2012; Sigrist et al., Citation2013; Swinnen, Citation1996). As opposed to intrinsic or internal feedback that is inherent to an action (i.e. information naturally available to the senses when producing a movement), augmented feedback is provided by an external source (e.g. coach or display). It may complement the information naturally available to the sensory receptors or provide new information with the aim of promoting the learning process (Newell et al., Citation1985) (in this article, feedback refers to augmented feedback unless otherwise indicated). From a content perspective, feedback has been typically classified in Knowledge of Results (i.e. information relating to the movement outcome; KR) and Knowledge of Performance (i.e. information relating to the quality of movement parameters contributing to the movement outcome; KP) (Gentile, Citation1972; Newell, Citation1976; Wulf et al., Citation2010). While practitioners likely use their experiential knowledge to gauge feedback content, in the scientific literature it has been relatively overlooked how KR, KP and their combination influence the learning process, and no clear theoretical rationale for their use is provided (e.g. Magill & Anderson, Citation2017).
Knowledge of Results (KR) has represented one of the main research foci on motor learning in the twentieth century, shaping and providing an empirical ground for the conceptualization of predominant motor learning theories (for an historical overview of KR and motor learning see Adams, Citation1987; Newell, Citation1976). KR is widely defined as information about the outcome of a performed movement, and it typically contains information on the magnitude of movement error with respect to the task goal. Historically, the role and functions of KR have been viewed and investigated from at least three research perspectives. First, rooted in Thorndike’s and Skinner’s seminal research on learning, KR has been attributed a reinforcement role and was considered a core factor of reinforcement learning (i.e. strengthening the Stimulus-Response relationship; Skinner, Citation1954; Thorndike, Citation1913). Second, with the advent of cognitive psychology, KR was ascribed to having an informational role (Bilodeau, Citation1966; Salmoni et al., Citation1984). Rather than strengthening (or weakening) the Stimulus-Response relationship, KR was postulated to provide information about errors made in a movement and to promote learners correcting their errors (Adams, Citation1987). KR was argued to enrich the so-called perceptual trace in Adam’s closed-loop theory (Adams, Citation1971) and the schemata in Schmidt’s Schema theory (Schmidt, Citation1975). Third, inspired by dynamical systems theory, KR has been conceptualized as providing information for guiding a learner’s search for a movement solution that is functional to the goal of a task (Blackwell & Newell, Citation1996; Fowler & Turvey, Citation1978; Newell, Citation1991). Despite these differences in conceptualizing its function, there is little doubt that KR is a key component for motor learning and that its role is to provide information about a movement outcome to allow a learner correcting their movement error, which would eventually lead to learning.
A remarkable amount of research has shown that KR, in most cases, provides all the necessary information to promote learning in tasks with a single goal criterion; however, it becomes more complicated in tasks with a higher number of goal criteria and, consequently, movement degrees of freedom to control. In the latter, KR may not be sufficient to provide all the necessary information (Fowler & Turvey, Citation1978; Newell & Walter, Citation1981; Schmidt & Young, Citation1991). For example, in a positioning task, whereby learners are required to learn to move a lever to a precise location (or precise timing) using their arm on the longitudinal axis (e.g. Adams, Citation1971), KR indicates the magnitude of a movement error, and a learner can intuitively adjust their movement on the one and only dimension and improve their performance (McGinnis & Newell, Citation1982). In this one-to-one relation between KR information and change required to improve performance, KR unambiguously guides a learner towards movements that mapped onto the task goal (Fowler & Turvey, Citation1978). This type of simple lab-based one-degree-of-freedom tasks dominated motor learning research during the cognitive, information-processing period, and KR was the only source of augmented feedback investigated given the task characteristics mentioned above (Adams, Citation1984). However, in complex tasks with more than one goal criterion (e.g. movement sequences and movement with a specific force-time pattern) and multiple degrees of freedom to control (e.g. a gymnastic vault), providing the magnitude of error through KR would not indicate learners how they could change their movement to improve performance. Learners would know that something was wrong with their movement, but they could struggle to understand which goal criteria need adjustments or what part of the movement they could modify. Researchers realized then that KR may not always be a sufficient information source to promote learning (Gentile, Citation1972; McGinnis & Newell, Citation1982; Newell et al., Citation1985; Pacheco et al., Citation2019; Salmoni et al., Citation1984).
Augmented feedback in terms of Knowledge of Performance (KP) was first introduced by Gentile (Citation1972). KP provides information on the movement process, e.g. trajectory and pattern of force in time, and by doing so, may complement or even substitute KR in certain tasks. For example, a video-replay of a performer’s movement or a force-time graph can show how a movement unfolded, and a performer can use this information to change certain aspects of the movement. KP can be further divided into kinetic and kinematic information (Newell et al., Citation1985; Newell & Hancock, Citation1981). Kinetic pertains to the force produced by the body during the execution of a movement, while kinematic pertains to the position and velocity of limbs, movement time, and patterns of coordination. As a way of example, in a ball-throwing task towards a far target, KR would provide information on how accurate each shot was, while KP would provide information on the characteristics of the throwing movement underlying the movement outcome. By definition, KR is usually provided terminally (i.e. after the movement), while KP can be also provided concurrently (i.e. during movement) tracking a movement as it unfolds.
KR and KP provide information on different aspects of a movement, and a key issue for motor learning is to understand how these two types of feedback content influence the learning process. Gentile (Gentile, Citation1972; Gentile & Nacson, Citation1976) argued that KP would be superior to KR in closed skills, where environmental conditions are constant and a specific movement pattern is the task goal (i.e. movement isomorphic with task goal). In this type of tasks, it is proposed that a learner primarily focuses on reproducing specific parameters of a movement, and movement-related information (KP) provides the relevant information for the learning and stabilization of a target movement. Contrarily, in open skills, whereby environmental conditions change and different movement patterns can achieve the task goal, Gentile (Citation1972) argued that KR would be superior to KP. Here, a learner focuses on consistently attaining the task goal, and goal-related information is the relevant information for learning a skill. In short, it is argued that KP is preferable in tasks where the precise production of a movement itself is the goal (e.g. a gymnastic vault), and KR is preferable in tasks with an environmental goal (e.g. throwing accuracy).
Another prominent approach contends that the dimensions of feedback information should match the degrees of freedom/dimensions of movement to be controlled to achieve a task goal (Fowler & Turvey, Citation1978; McGinnis & Newell, Citation1982; Newell et al., Citation1985). This approach, drawn from dynamical systems theory (Kelso, Citation1995), conceptualizes motor skill learning as an individual’s search through the perceptual-motor workspace (i.e. movement coordination possibilities emerging from task, learner and environment) for movement solutions (in the goal space) that are functional to achieving a task goal (Davids et al., Citation2008; Fowler & Turvey, Citation1978; Kugler & Turvey, Citation1987; Newell, Citation1996; Pacheco et al., Citation2019). From this perspective, feedback is key for constraining a learner’s search towards goal-related functional solutions (for an overview see Pacheco et al., Citation2019; Pacheco & Newell, Citation2018). Therefore, the choice of feedback content depends on the number of movement dimensions to control/constrain, and ‘for the degrees of freedom necessitating control there must be at least as many degrees of constraint in the information supporting that control’ (Fowler & Turvey, Citation1978, p. 36). In simple tasks with one dimension to control (e.g. timing or positioning tasks), KR can readily match this dimension, guide the movement search, and promote learning (Fowler & Turvey, Citation1978). Conversely, tasks with more than one movement dimension to control would require feedback with more than one information dimension, and KP should be added to KR to specify the dimensions to control (for a similar argument see Maier et al., Citation2019; Triano et al., Citation2012). For example, in a task with the goal of reproducing a specific pattern of force in time (2 dimensions: force and time), KR cannot specify the two dimensions to control (it can only specify one, or an average of the two), while a combination of KR and KP (e.g. a force-time plot) can provide information on all dimensions.
This approach (i.e. searching for a functional movement) would also predict that KP can be superior to KR if it directs a learner towards region(s) of the perceptual-motor workspace that contains goal-related solutions. KP can be descriptive (i.e. ‘simply’ describes how a movement was performed) or prescriptive (i.e. provided in reference to a target parameter or containing information on what to do next to improve) (Newell et al., Citation1985). It has been proposed that KP has to be prescriptive to ‘tell’ a learner how to navigate the perceptual-motor workspace, as a descriptive KP would not indicate what region of the perceptual-motor workspace is goal-related (Newell, Citation1991). This should hold for novices, who are not familiar with and not attuned to informational properties of their perceptual-motor workspace (for a given task), and may need guidance (in the form of prescriptive KP or also with an appropriate manipulation of the practice environment) to avoid a dispendious and inefficient random search (McGinnis & Newell, Citation1982; Pacheco & Newell, Citation2018). However, a learner-specific movement optimum is hardly (if ever) possible for a practitioner to mathematically compute/predict – especially in complex multiple-degree-of-freedom movements (for an extensive review see McErlain-Naylor et al., Citation2021). As such, a prescriptive KP provided in reference to a general sub-optimal movement may be harmful in skilled individuals, who are already exploring and exploiting functional region(s) of their perceptual-motor workspace. In this case, a descriptive KP may be more beneficial for informing skilled performers on how they moved and they can figure out what to change to improve.
In summary, the two main approaches on feedback content for motor skill learning proposed in the literature contend that (i) KR should provide the necessary information in simple tasks with one movement dimension to control (one goal criterion), but it should be complemented with KP in tasks with more movement dimensions to control, (ii) KP is superior to KR in tasks with movement isomorphic with task goal, and KR is superior to KP in tasks with an environmental goal. Furthermore, from a dynamical systems perspective, prescriptive KP should be superior to KR for promoting learning in novices, and descriptive KP may be superior to KR in skilled individuals. Conversely to these views, Wulf and colleagues (Wulf & Schmidt, Citation2014; Wulf & Shea, Citation2004) argued that KR and KP similarly influence the learning process and other feedback characteristics are more relevant (e.g. attentional focus and frequency). To date, a comprehensive review of the influence of KR, KP and their combination on motor learning has not been carried out, and it is unclear how they influence the learning process.
This systematic review aims to compare the effect of KR with the effect of KP, and a combination of KR and KP, on motor skill learning. Specifically, we investigated whether (i) KR provides all necessary information in tasks with one movement dimension to control, while KP should complement KR (KR + KP) in tasks with more than one movement dimension to control, (ii) KP is superior to KR in tasks where the movement itself is the goal, and KR is superior to KP in tasks with an environmental goal, and (iii) independently of task goal, prescriptive KP is superior to KR in novices, and descriptive KP is superior to KR in skilled individuals. A systematic review was conducted on studies that compared the effect of KR with the effect of KP or a combination of KR and KP on learning in healthy participants. Furthermore, considering the distinction between learning and performance (Wulf et al., Citation2010) and the importance of assessing the learning effect of a feedback intervention using a retention/transfer test without feedback (Salmoni et al., Citation1984), only studies that included such test in their design were included, to assess learning.
Methods
Search strategy
The guidelines proposed by the Preferred Reporting Items for Systematic Reviews and Meta-Analyses (PRISMA) were followed (Moher et al., Citation2009). Keyword searches identified articles from four databases: Psychinfo, PubMed/MEDLINE, Scopus, and SportDiscuss. The following syntax was used: (augmented OR extrinsic OR external OR ‘knowledge of results’ OR ‘knowledge of performance’ OR kinetic OR kinematic OR KR OR KP) AND feedback AND (skill OR motor OR movement) AND (learning OR acquisition OR training). The search was initially performed on the 3rd of August 2020 and updated on the 27th of May 2021.
Inclusion and exclusion criteria
Studies meeting the following criteria were included in the review: (a) published as a full-text article in English through peer-review process, (b) the research was empirical, (c) participants were healthy (i.e. did not have any medical condition), to avoid any interaction of feedback content with medical condition, (d) the study design included a learning intervention and pre, post, retention or transfer tests (i.e. learning was examined), (e) the feedback content was the primary variable manipulated, and (f) KR was compared with KP or KR plus KP.
Feedback classification
Feedback is typically classified as KR when it specifies the outcome of a movement in reference to the task goal, and KP when it relates to movement parameters relevant for producing the movement outcome. For example, in shooting and throwing tasks, shoot and throw accuracy would be classified as KR, while movement kinematics (e.g. a space–time graph of the throwing arm) and kinetics (e.g. exerted force) would be classified as KP. The classification becomes more problematic in tasks whereby the movement pattern is isomorphic with the task, i.e. a pre-defined movement pattern is the task goal. For example, a specific dance movement or sequence of movements is the task goal. Keeping with the usual classification, information on goal-related movement parameters should be classified as KR; however, this information can also be classified as KP when it describes how a movement unfolded, e.g. a time graph of a just performed movement. To solve this potential ambiguity, we decided to operationalize KR and KP for this type of tasks combining the seminal work of Newell & colleagues (Newell et al., Citation1985; Newell & Hancock, Citation1981; Newell & Walter, Citation1981) and Schmidt & Young (Schmidt & Young, Citation1991; Young & Schmidt, Citation1992). Accordingly, goal-related information presented terminally (i.e. after a movement) as average value (e.g. average movement time and movement error) was classified as KR, while goal-related information describing how a movement parameter unfolded during the task (e.g. space–time and position-time graph) was classified as KP (Newell & Hancock, Citation1981). This operationalization acknowledges that, while the information provided referred to the same movement value, KR describes the outcome of a movement and KP describes the movement process.
Methodological quality: risk of bias assessment
Risk of bias was assessed to evaluate the methodological quality of the included studies (Higgins et al., Citation2020). The RoB 2 tool (Sterne et al., Citation2019) was used to assess risk of bias in randomized controlled trials (RCT), while the ROBINS-I tool (Sterne et al., Citation2016) was used in non-randomized controlled trials (tools available at https://www.riskofbias.info/welcome). The RoB 2 tool is comprised of five bias domains: (1) randomization process, (2) deviations from the intended interventions, (3) missing outcome data, (4) measurement of the outcome, and (5) selection of the reported results. The ROBINS-I tool is comprised of seven bias domains: (1) confounding, (2) selection of participants into the study, (3) classification of interventions, (4) deviations from the intended interventions, (5) missing data, (6) measurement of outcomes, and (7) selection of the reported results. Both tools contain signaling questions that help to assess the potential bias in each domain. Each domain has three possible outcomes – low, some concerns, and high. An overall outcome, corresponding to the highest risk across domains was calculated for each study (i.e. if the risk was some concerns in one domain only but low in all other domains, the overall risk was some concerns). The results of the risk of bias assessment are presented using the traffic light system: green (low), yellow (some concerns), and red (high).
Data extraction
The following data were extracted for each study: (a) participants’ characteristics, (b) study design, (c) practiced skill and task, (d) goal of the task, (e) movement dimensions to control as a dichotomy (i.e. one or more than one), (f) intervention details, and (g) assessment procedure.
Synthesis of results
Due to the heterogeneity of studies (e.g. different study designs and outcomes) and inconsistency of the effect measures and data reported across studies, it was not possible to compute a meta-analysis. After an initial exploration of the data presented in each study, we decided to synthesize results using vote counting based on direction of effect. Despite some limitations (i.e. does not provide an estimate of effect magnitude, does not account for different study sizes, and it is less powerful than combining p values), this synthesis is a valid method for estimating the overall direction of an effect (McKenzie & Brennan, Citation2020).
The synthesis without meta-analysis (SWiM) guideline for systematic reviews was followed (Campbell et al., Citation2020). (i) grouping: studies were grouped based on the feedback content they examined: KR vs KP, and KR vs KR + KP. Then, according to our research questions, sub-groups were created based on the intervention adopted: one dimension to control, more than one dimension to control, movement isomorphic with task goal, and movement with an environmental task goal. Each group was then sub-divided into studies that provided prescriptive or descriptive KP. (ii) standardized metrics: the direction of effect was calculated from descriptive statistics or graphs on the outcome(s) related to the specific task goal in each study (see for the outcome selected in each study). Three direction outcomes were possible: in favor of KR, in favor of KP (or KR + KP), or no change/mixed effects/conflicting findings (Thomson & Thomas, Citation2013). An effect was classified in favor of KR or KP when at least 70% of the analyzed outcomes reported a similar direction, while it was classified no change/mixed effects/conflicting findings if otherwise. The assessment was performed on the pre- to retention/transfer-test change, or on the retention-test when pre-test was not reported. Trials were averaged within each assessment point (e.g. 5 trial blocks were averaged across the immediate retention time point). Statistical significance was not considered for assessing the direction (Boon & Thomson, Citation2021). Some studies had different intervention conditions (e.g. prescriptive and descriptive KP) and appear in the synthesis multiple times with different results. (iii) synthesis methods: the sign test (nonparametric test) was computed to examine the probability of observing the obtained direction of effect if the null hypothesis (i.e. equal number in one direction and the other) were true (Moore & McCabe, Citation2002). The number of results in favor of KR and KP (or KR + KP) was counted, and the p-value was computed using GraphPad (https://www.graphpad.com/quickcalcs/binomial1/). Inconsistent results (i.e. insufficient data from a study) were not included in the counting (see Boon & Thomson, Citation2021). (iv) criteria for prioritizing results: results were prioritized for summary and interpretation in the following order: risk of bias (low risk of bias first), study design (RCT first), directedness of study’s research question in relation to review question, i.e. whether the study directly compared KP with KR or KR + KP (direct evaluation first), volume of practice (high volume first), and sample size (large sample first). (v) investigation of heterogeneity: a formal statistical method was not possible, and heterogeneity was evaluated narratively across the different sub-groups, including participants’ skill level. (vi) certainty of evidence: evidence was evaluated based on study design (RCT or non-RCT) and risk of bias. (vii) data presentation: study characteristics were presented in a descriptive table format () and the synthesis of results was presented using the effect direction plot ( and ).
Reliability in conducting the planned procedure
Two authors (LO and AD) independently carried out the planned procedure to minimize bias: search and screening of articles, risk of bias assessment, extraction of data, and synthesis of results. After each step, the two authors compared their results and differences were discussed, and if consensus was not reached the third author (SN) was consulted.
Results
Search
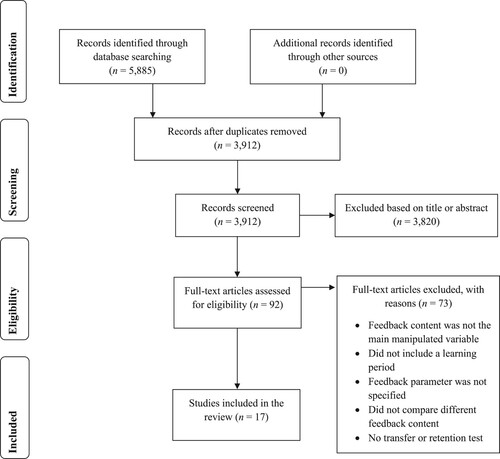
The search through the four databases resulted in a total of 5885 articles (2384 in PubMed, 2158 in Scopus, 866 in Psychinfo, and 617 in SportDiscuss), of which, 92 were read in full, while the others were excluded based on their title or abstract. Of the 92 articles, 73 were excluded because they either did not specify what information parameter was provided, did not compare different feedback conditions, did not include a learning period or did not use a retention or transfer test. As such, 19 articles were initially included in the review (). However, two articles (Enebo & Sherwood, Citation2005; Judkins et al., Citation2008) did not report sufficient outcome data for the synthesis of results and were excluded. Two of the included articles (Newell et al., Citation1987, Citation1990) presented two studies; therefore, a total of 17 articles and 19 studies were included in the review.
Figure 1. Flow diagram of the search and study selection process.
Methodological quality
The risk of bias of the included studies is presented in . Thirteen studies have an overall low risk of bias, four have some concerns, and two have a high risk of bias. The randomization process domain presented the highest risk of bias. Four studies were rated as having some concerns and one as showing a high risk. This risk was assessed taking into consideration the type of skill and the participants’ level of experience. The raters agreed on rating it high when there was a baseline difference between groups, and rating it some concerns when there could have been a baseline difference. If a study did not assess baseline difference, the risk was considered low only if a skill/task was completely novel and it was reasonable to assume no baseline difference (e.g. for most RCTs); it was rated some concerns otherwise.
Table 1. Results of the risk of bias assessment for the included studies.
Overview of study characteristics
A detailed description of study characteristics is presented in . Sixteen studies adopted a randomized-controlled design, two studies adopted a non-randomized controlled design, and one study a cross-over design. The median sample size was 41 participants, the median participants’ age was 25.5 years, and the median number of practice trials was 100. All studies recruited novice participants, except one study that recruited participants with an intermediate skill level. A variety of applied skills (whole-body box lifting, rifle shooting, laparoscopic surgery, ball throwing, manipulation of thoracic spine, postural balance, golf putting) and lab-based tasks (grip force production, force production, lever positioning, drawing, inter-arm decoupling, timing, speed-accuracy trade-off tapping) were investigated.
Table 2. Summary of the studies’ characteristics.
Synthesis of results
The synthesis includes results from 19 studies.
One or more dimensions to control
shows the direction of effect grouped in studies using tasks with one and with more than one dimension to control. Only one study examined a task with one dimension to control, and the direction was in favor of KR.
Table 3. Direction of effect plot with studies grouped in tasks with one or more dimensions to control. Sub-groups include effect direction when KP was prescriptive or descriptive.
In studies with more than one dimension, for KR vs KP, the overall effect direction was unclear (p = 0.4). Out of 14 studies, eight were in favor of KP, two in favor of KR, and four showed mixed effects. One study in favor of KR had a high risk of bias. When KP was prescriptive, eight studies were in favor of KP and three studies showed mixed effects (p = 0.1). When KP was descriptive, all three studies showed an effect in favor of KR (p = 0.1). For KR vs KR + KP, an overall statistically significant effect direction was observed in favor of KR + KP (p = 0.02). Out of nine studies, eight were in favor of KR + KP and one showed mixed effects. One study in favor of KR + KP had a high risk of bias. When KP was prescriptive, a statistically significant effect direction was observed in favor of KR + KP (p = 0.002). All eight studies showed an effect in favor of KR + KP. One study had a high risk of bias. With descriptive KP, the effect direction was unclear (p = 0.5). One study showed an effect in favor of KR + KP and two studies had mixed effects.
The goal was the movement or environmental
shows the direction of effect grouped in tasks with movement goal and environmental goal. In studies with a movement goal, for KR vs KP, the overall effect direction was mixed (p = 0.7). Two studies were in favor of KP and two studies showed mixed effects. The effect was only examined with prescriptive KP.
Table 4. Direction of effect plot with studies grouped in tasks with movement or environmental goal. Sub-groups include effect direction when KP was prescriptive or descriptive.
In studies with an environmental goal, for KR vs KP, the overall effect direction was unclear (p = 0.4). Six studies were in favor of KP, two studies in favor of KR, and two studies showed mixed effects. One study in favor of KR had a high risk of bias. With prescriptive KP, the effect direction was in favor of KP (p = 0.06). Six studies had an effect in favor of KP and one study had mixed effects. With descriptive KP, the effect direction was in favor of KR (p = 0.1). All three studies were in favor of KR.
Discussion
This systematic review examined how KR promotes motor learning relative to KP and a combination of KR and KP. Specifically, we investigated whether (i) KR is superior to KP in tasks with one movement dimension to control, and KP should complement KR in tasks with more than one movement dimension to control, (ii) KP is superior to KR in tasks where movement itself is the goal, and KR is superior to KP in tasks with an environmental goal, and (iii) prescriptive KP is superior to KR in novices, and descriptive KP in skilled individuals. All included studies, except one, examined tasks with more than one dimension to control, and all studies, except one, recruited novice participants. Therefore, all results refer and can generalize to this type of tasks and skill level. In all analyses, KR was compared with KP or KR plus KP. The results showed an overall significant direction of effect in favor of KR plus KP, and an overall unclear effect direction when KR was compared with KP (). The effect in favor of KR plus KP increased when KP was prescriptive, and the effect became unclear when KP was descriptive (). Furthermore, albeit not significant (p = 0.1), the effect shifted in favor of KP when KP was prescriptive, and in favor of KR when KP was descriptive (). In tasks with a movement goal or an environmental goal, the direction of effect was unclear; however, in tasks with an environmental goal, there was a clear shift of the effect towards KP when KP was prescriptive, and towards KR when KP was descriptive ().
The results support the argument that a combination of KR and KP promotes enhanced learning relative to KR in tasks with more than one dimension to control (Fowler & Turvey, Citation1978; McGinnis & Newell, Citation1982; Newell et al., Citation1987). All studies showed an effect in favor of KR plus KP, except one study that revealed a mixed effect. For example, in shooting and throwing tasks, supplementing KR on accuracy error with information on movement aspects (e.g. aiming trajectory and cues from coaches) was more beneficial than KR alone (Dana et al., Citation2011; Kernodle & Carlton, Citation1992; Konttinen et al., Citation2002; Konttinen et al., Citation2004; Mononen et al., Citation2003; Sharma et al., Citation2016). The study with a mixed effect (Newell et al., Citation1990) used a drawing task with three goal criteria (shape, size and center point of a circle). The authors suggested that, due to participants’ prior knowledge of circle drawing, the three criteria could be reduced to one criterion (scale the size of a circle), explaining the mixed effect. This provides further evidence of a clear effect in the direction of KR plus KP in tasks with more than one dimension to control. In this type of tasks, KR is ambiguous (i.e. does not specify how to change action to improve performance), and KP supplements further information to improve a movement and learn a skill. On the other hand, it was not possible, due to a very limited number of studies (n = 1), to evaluate whether KR is superior to KP in tasks with one dimension to control. Here, KR would be unambiguous and readily specify how to change action and improve performance (Fowler & Turvey, Citation1978), and KP would be redundant. The lack of studies on this issue might be due to the fact that extensive research has examined how KR operates in such simple tasks (Adams, Citation1984, Citation1987; Newell, Citation1976; Salmoni et al., Citation1984), and that KP likely would not provide any additional and meaningful information for learning.
The results did not confirm the hypothesis that KP is superior to KR in tasks with a movement goal and that KR is superior to KP in tasks with an environmental goal, as originally proposed by Gentile (Citation1972). For the former, a limited number of studies (n = 4) examined the issue and results were unclear. It must be noted that Gentile (Citation1972) formulated her argument in physical education and sport contexts, whereby complex, whole-body movements are learned (e.g. a gymnastic vault), but the reviewed studies used relatively simple lab-based tasks (e.g. force generation with one limb). Therefore, KR and KP might operate differently in this type of tasks depending on task and movement complexity. Future research should examine this issue. In studies with an environmental goal, results supported the hypothesis only when KP was descriptive, and they showed an opposite trend when KP was prescriptive (i.e. the effect was in favor of KP). These results suggest that, in this type of tasks, feedback content does not operate one way only, but the effect of KR and KP depends on how KP is provided. Considering the low number of studies, especially when KP was descriptive, these results should be interpreted with some caution.
The clear cut result of this review is that, independent of goal type, a prescriptive KP shifted the effect in favor of KP or strengthen the effect in favor of KR plus KP, and a descriptive KP shifted the effect in favor of KR or weakened the advantage of KR plus KP. This indicates that the effect of KR, KP, and their combination, primarily depends on KP content: prescriptive KP promotes learning while descriptive KP may hinder learning relative to KR. For example, in a throwing task aiming for distance, KR on distance was more beneficial than a video-replay of the just-performed shot (descriptive KP), but a video-replay of the just-performed shot plus coach’s cues on how to improve the movement (prescriptive KP) was more beneficial than KR (Kernodle & Carlton, Citation1992). These results were consistent across relatively simple (e.g. timing, force and position tasks) and complex (e.g. lifting, shooting, throwing, and golf putting) movements, but they can only be generalized to novice learners, as all studies recruited novices (except for Konttinen et al., Citation2004). Importantly, this finding places KP at the core of feedback content. While, historically, KR has always been at the core of feedback content – frequently, KR has been used as synonym for augmented feedback (see Adams, Citation1987; Newell, Citation1976), this study suggests to re-weight the relative importance of KR and KP. They do not promote motor skill learning similarly, as previously suggested (Wulf & Schmidt, Citation2014; Wulf & Shea, Citation2004), they rather operate differently, and the selection of KP content seems to be one of the key aspects to consider when implementing a feedback strategy.
Theoretical implications
We speculate – the included studies did not directly assess it – that the results are consistent with the view of motor skill learning as a search process through the perceptual-motor workspace for goal-relevant movement solutions (Davids et al., Citation2008; Fowler & Turvey, Citation1978; Newell, Citation1996; Pacheco et al., Citation2019), and that augmented feedback is key for guiding/channeling a learner’s search (Pacheco & Newell, Citation2018). Through the search process, a learner explores different regions of their perceptual-motor workspace and stabilizes movements in the space region(s) that maps onto the goal space (Beek & van Santvoord, Citation1992; Latash, Citation2010; Newell, Citation1991; Rohde et al., Citation2019; Yang & Scholz, Citation2005). The results suggest that feedback content facilitates this process when it directs a learner towards the goal space, and the more prescriptive the content the clearer its effect: prescriptive KP was more beneficial than KR, and KR was more beneficial than descriptive KP. Prescriptive KP will directly ‘tell’ a learner what to modify to move towards goal-relevant solutions and improve a movement; KR will ‘tell’ the movement error and a learner can try different solutions to improve; descriptive KP will simply ‘tell’ what was done, without any indication on what was good or bad, and what should be changed to improve (the learner is left out in the wild without guidance). Based on our classification of KP, prescriptive KP can explicitly or implicitly indicate what and how to change to improve a movement, by directly specifying the required change (so called transitional information, Newell et al., Citation1985) or specifying deviations to a target parameter, respectively. We are not arguing that a feedback strategy should guide a learner towards the one way of performing a movement/skill, but, considering that most tasks outside the lab are redundant (i.e. different movements can achieve the task goal), we argue that feedback content should be somewhat prescriptive to direct a learner towards regions/solutions of the movement space that are likely to contain goal-relevant solutions.
The results indicate that the selection of KP content is a key aspect for feedback efficacy, and prescriptive KP should be preferred over descriptive KP. We emphasize that we can generalize these results only to novices, and we acknowledge that the picture might be different in skilled/expert performers. Skilled movements appear roughly similar across different individuals (Newell et al., Citation1985) and goal-relevant solutions are typically situated in a relatively restricted area of a task space (for examples see Pacheco et al., Citation2019). Providing a prescriptive KP based on a general view of how a skilled movement (goal-relevant solutions) looks like seems enough for novices – they are new to the task at hand and rough indications on how to explore the different movements are helpful. However, skilled and expert performers already explore and exploit regions of the perceptual-motor workspace near or at their optimum, and prescriptive KP has to be highly specific to the nuances they can work on within their own movement repertoire and optimum. However, it is hardly (if ever) possible to compute an individual optimum that includes an individual’s intrinsic dynamics (McErlain-Naylor et al., Citation2021). In the absence of an individual optimum, a combination of KR and descriptive KP might be more beneficial than prescriptive KP to allow a skilled/expert performer to figure out how they can improve their movement.
Practical implications for feedback design
The findings of this review provide insights that can guide practitioners in designing feedback strategies for promoting the learning of motor skills. The key message is that, irrespective of task goal, a combination of KR and prescriptive KP seems to be the best solution, then, prescriptive KP is superior to KR, and KR is superior to descriptive KP in novice performers. This information can guide practitioners in selecting the feedback content depending on the data they can obtain on their students or athletes. Prescriptive KP emerged as one of the key aspects, and, while KR is relatively simple to assess, it can be quite challenging to obtain accurate prescriptive KP. The reviewed studies designed prescriptive KP using the target/criterion movement in lab-based tasks where the goal was the movement itself (Newell et al., Citation1987; Newell et al., Citation1990; Newell & Carlton, Citation1987; van Dijk et al., Citation2007). This strategy could be adopted in situations where the goal is to reproduce a specific movement pattern (e.g. in gymnastics). However, most tasks outside the lab do not have one way of moving to achieve the task goal (i.e. they are redundant). In this case, the reviewed studies used coaches’ experiential knowledge (Dana et al., Citation2011; Sharma et al., Citation2016; Smith et al., Citation1997), an analysis of expert performance (Horeman et al., Citation2014; Kernodle & Carlton, Citation1992), or an ideal trajectory (Konttinen et al., Citation2002; Konttinen et al., Citation2004; Mononen et al., Citation2003; Zhu et al., Citation2019). In short, it is essential to analyze the skill of interest in depth and derive a prescriptive KP using different sources of information (e.g. coach’s knowledge and biomechanical analysis of the skill).
Limitations and methodological implications
The number of studies included in this review was surprisingly low (n=19). While the main findings showed statistical significance, future research is required to further examine how KR, KP, and their combination affect motor skill learning. Specifically, future research should focus on two main points: examine how feedback content interacts with skill level, and how sub-classifications of KP influences learning. Considering the importance of KP content (i.e. prescriptive or descriptive) and the challenge of obtaining an accurate individual optimum (for designing prescriptive KP), future research should recruit participants with different levels of expertise (especially experts) and evaluate how KR, KP, and their combination operate with skill level. For instance, in expert athletes, is it more beneficial to supplement KR with a sub-optimal prescriptive KP, or with descriptive KP and let them figure out how to change their movement? Furthermore, the literature on feedback content has typically classified any parameter related to movement as KP. However, seminal research in motor control has shown that, for instance, control and elemental parameters of a movement are controlled and learned differently (Latash et al., Citation2002; Latash et al., Citation2010). For example, in a ball-throwing task, angle and speed of ball release are control parameters, while limb kinematics are elemental parameters. While both movement parameters would be classified as KP, they affect the learning process differently and prescribing one or the other category – as prescriptive KP – may be more or less effective. For example, it may be reasonable to prescribe control parameters, as they typically show low variability; however, it may not be optimal (or at least challenging) to prescribe elemental parameters, as they show high intra- and inter-subject variability (Latash, Citation2010, Citation2012).
Lastly, we acknowledge that the methods for synthesizing results adopted in this study present some limitations. The recommended methods for synthesizing results in a systematic review is a meta-analysis of the effects, but this was not possible due to inconsistency in reporting effect data across the reviewed studies. Considering the available data, the only option was vote counting based on direction of effect. While this method is valid and recommended in the Cochrane Handbook for Systematic Reviews of Interventions, it does not provide an estimate of effect magnitude, does not account for different study sizes, and is less powerful than combining p values (McKenzie & Brennan, Citation2020). Therefore, the results of this study can be only interpreted in light of these limitations as we did.
Conclusion
This systematic review examined how KR promotes motor skill learning relative to KP and a combination of KR and KP. The results showed that a combination of KR and prescriptive KP is superior to KR, prescriptive KP alone is superior to KR, and KR is superior to descriptive KP. These results indicate that KP content is a critical component of a feedback strategy and seems to ‘hold the balance of power’, i.e. prescriptive KP favors a strategy with KP (alone or in combination with KR), while descriptive KP favors a strategy with KR. We speculate that this finding supports the view that augmented feedback promotes motor learning when it facilitates a learner’s search for goal-relevant movement solutions. We argue that feedback content should be somewhat prescriptive to direct a learner towards regions/solutions of the movement space that are likely to contain goal-relevant solutions. These findings can help practitioners designing their feedback interventions and improve the learning process. Importantly, considering the sample recruited in the reviewed studies, these results can be generalized only to novices. KR, KP, and their combination may operate differently in skilled/expert individuals. We encourage future research to examine how a learner’s skill level and additional classification of KP content influence the role of KR and KP on the learning process.
Disclosure statement
No potential conflict of interest was reported by the author(s).
Data availability statement
This article did not create new data. The data analysed in this article has been retrivied from the cited sources, and the analysis of the data is readily available in the results section ( and ).
Additional information
Funding
References
- Adams, J. A. (1971). A closed-loop theory of motor learning. Journal of Motor Behavior, 3(2), 111–150. https://doi.org/10.1080/00222895.1971.10734898
- Adams, J. A. (1984). Learning of movement sequences. Psychological Bulletin, 96(1), 3–28. https://doi.org/10.1037/0033-2909.96.1.3
- Adams, J. A. (1987). Historical review and appraisal of research on the learning, retention, and transfer of human motor skills. Psychological Bulletin, 101(1), 41–74. https://doi.org/10.1037/0033-2909.101.1.41
- Agruss, C. D., Williams, K. R., & Fathallah, F. A. (2004). The effect of feedback training on lumbosacral compression during simulated occupational lifting. Ergonomics, 47(10), 1103–1115. https://doi.org/10.1080/00140130410001686375
- Beek, P. J., & van Santvoord, A. A. (1992). Learning the cascade juggle: A dynamical systems analysis. Journal of Motor Behavior, 24(1), 85–94. https://doi.org/10.1080/00222895.1992.9941604
- Bilodeau, I. M. (1966). Information feedback. In E. A. Bilodeau (Ed.), Acquisition of skill (pp. 255–296). Academic Press.
- Blackwell, J. R., & Newell, K. M. (1996). The informational role of knowledge of results in motor learning. Acta Psychologica, 92(2), 119–129. https://doi.org/10.1016/0001-6918(95)00013-5
- Boon, M. H., & Thomson, H. (2021). The effect direction plot revisited: Application of the 2019 Cochrane Handbook guidance on alternative synthesis methods. Research Synthesis Methods, 12(1), 29–33. https://doi.org/10.1002/jrsm.1458
- Bouwsema, H., van der Sluis, C. K., & Bongers, R. M. (2014). Effect of feedback during virtual training of grip force control with a myoelectric prosthesis. PLoS ONE, 9(5), e98301. https://doi.org/10.1371/journal.pone.0098301
- Campbell, M., McKenzie, J. E., Sowden, A., Katikireddi, S. V., Brennan, S. E., Ellis, S., Hartmann-Boyce, J., Ryan, R., Shepperd, S., Thomas, J., Welch, V., & Thomson, H. (2020). Synthesis without meta-analysis (SWiM) in systematic reviews: Reporting guideline. BMJ, 368, l6890. https://doi.org/10.1136/bmj.l6890
- Dana, A., Jalili, F., Fathizadan, A., & Zivdar, Z. (2011). The effect of a period of feedback training on learning shooting skill among inexperienced shooters. Australian Journal of Basic and Applied Sciences, 5(10), 881–884.
- Davids, K., Button, C., & Bennett, S. J. (2008). Dynamics of skill acquisition: A constraints-led approach. Human Kinetics.
- Enebo, B., & Sherwood, D. (2005). Experience and practice organization in learning a simulated high-velocity low-amplitude task. Journal of Manipulative and Physiological Therapeutics, 28(1), 33–43. https://doi.org/10.1016/j.jmpt.2004.12.002
- Fowler, C. A., & Turvey, M. T. (1978). Skill acquisition: An event approach with special reference to searching for the optimum of a function of several variables. In G. E. Stelmach (Ed.), Information processing in motor control and learning (pp. 1–40). Academic Press. https://doi.org/10.1016/B978-0-12-665960-3.50006-2
- Gentile, A. M. (1972). A working model of skill acquisition with application to teaching. Quest, 17(1), 3–23. https://doi.org/10.1080/00336297.1972.10519717
- Gentile, A. M., & Nacson, J. (1976). Organizational processes in motor control. Exercise and Sport Sciences Reviews, 4(1), 1–34. https://doi.org/10.1249/00003677-197600040-00003
- Higgins, J. P. T., Savović, J., Page, M. J., Elbers, R. G., & Sterne, J. A. C. (2020). Chapter 8: Assessing risk of bias in a randomized trial. In J. P. T. Higgins, J. Thomas, J. Chandler, M. Cumpston, T. Li, M. J. Page, & V. A. Welch (Eds.), Cochrane handbook for systematic reviews of interventions (Version 6.1 ed.). Cochrane. www.training.cochrane.org/handbook
- Horeman, T., Van Delft, F., Blikkendaal, M. D., Dankelman, J., Van Den Dobbelsteen, J. J., & Jansen, F. W. (2014). Learning from visual force feedback in box trainers: Tissue manipulation in laparoscopic surgery. Surgical Endoscopy, 28(6), 1961–1970. https://doi.org/10.1007/s00464-014-3425-x
- Judkins, T. N., Oleynikov, D., & Stergiou, N. (2008). Enhanced robotic surgical training using augmented visual feedback. Surgical Innovation, 15(1), 59–68. https://doi.org/10.1177/1553350608315953
- Kelso, J. A. S. (1995). Dynamic patterns: The self-organization of brain and behavior. MIT Press.
- Kernodle, M. W., & Carlton, L. G. (1992). Information feedback and the learning multiple-degree-of-freedom activities. Journal of Motor Behavior, 24(2), 187–195. https://doi.org/10.1080/00222895.1992.9941614
- Konttinen, N., Mets, T., & Lyytinen, H. (2002). The effects of a feedback training programme on psychomotor skill learning in beginning rifle shooting. Journal of Human Movement Studies, 42(6), 495–514.
- Konttinen, N., Mononen, K., Viitasalo, J., & Mets, T. (2004). The effects of augmented auditory feedback on psychomotor skill learning in precision shooting. Journal of Sport and Exercise Psychology, 26(2), 306–316. https://doi.org/10.1123/jsep.26.2.306
- Kugler, P. N., & Turvey, M. T. (1987). Information, natural law, and the self-assembly of rhythmic movement. Lawrence Erlbaum Associates.
- Latash, M. L. (2010). Stages in learning motor synergies: A view based on the equilibrium-point hypothesis. Human Movement Science, 29(5), 642–654. https://doi.org/10.1016/j.humov.2009.11.002
- Latash, M. L. (2012). The bliss (not the problem) of motor abundance (not redundancy). Experimental Brain Research, 217(1), 1–5. https://doi.org/10.1007/s00221-012-3000-4
- Latash, M. L., Levin, M. F., Scholz, J. P., & Schöner, G. (2010). Motor control theories and their applications. Medicina, 46(6), 382–392. https://doi.org/10.3390/medicina46060054
- Latash, M. L., Scholz, J. P., & Schöner, G. (2002). Motor control strategies revealed in the structure of motor variability. Exercise and Sport Sciences Reviews, 30(1), 26–31. https://doi.org/10.1097/00003677-200201000-00006
- Magill, R. A., & Anderson, D. I. (2012). The roles and uses of augmented feedback in motor skill acquisition. In N. Hodges, & A. M. Williams (Eds.), Skill acquisition in sport: Research, theory and practice (2nd ed., pp. 3–21). Routledge.
- Magill, R. A., & Anderson, D. I. (2017). Motor learning and control: Concepts and applications (11th ed.). McGraw-Hill.
- Mansfield, A., Aqui, A., Fraser, J. E., Rajachandrakumar, R., Lakhani, B., & Patterson, K. K. (2017). Can augmented feedback facilitate learning a reactive balance task among older adults? Experimental Brain Research, 235(1), 293–304. https://doi.org/10.1007/s00221-016-4790-6
- Maier, M., Ballester, B. R., & Verschure, P. F. M. J. (2019). Principles of neurorehabilitation after stroke based on motor learning and brain plasticity mechanisms. Frontiers in Systems Neuroscience, 13, 74–74. https://doi.org/10.3389/fnsys.2019.00074
- McErlain-Naylor, S. A., King, M. A., & Felton, P. J. (2021). A review of forward-dynamics simulation models for predicting optimal technique in maximal effort sporting movements. Applied Sciences, 11(4), 1450. https://doi.org/10.3390/app11041450
- McGinnis, P. M., & Newell, K. M. (1982). Topological dynamics: A framework for describing movement and its constraints. Human Movement Science, 1(4), 289–305. https://doi.org/10.1016/0167-9457(82)90017-3
- McKenzie, J. E., & Brennan, S. E. (2020). Chapter 12: Synthesizing and presenting findings using other methods. In J. P. T. Higgins, J. Thomas, J. Chandler, M. Cumpston, T. Li, M. J. Page, & V. A. Welch (Eds.), Cochrane handbook for systematic reviews of interventions (version 6.1 ed.). Cochrane.
- Moher, D., Liberati, A., Tetzlaff, J., Altman, D. G., & The, P. G. (2009). Preferred reporting items for systematic reviews and meta-analyses: The PRISMA statement. PLOS Medicine, 6(7). https://doi.org/10.1371/journal.pmed.1000097
- Mononen, K., Viitasalo, J. T., Konttinen, N., & Era, P. (2003). The effects of augmented kinematic feedback on motor skill learning in rifle shooting. Journal of Sports Sciences, 21(10), 867–876. https://doi.org/10.1080/0264041031000101944
- Moore, D. S., & McCabe, G. P. (2002). Introduction to the practice of statistics. W. H. Freeman.
- Newell, K. M. (1976). Knowledge of results and motor learning. Exercise and Sport Sciences Reviews, 4(1), 195–228. https://doi.org/10.1249/00003677-197600040-00008
- Newell, K. M. (1991). Motor skill acquisition. Annual Review of Psychology, 42(1), 213–237. https://doi.org/10.1146/annurev.ps.42.020191.001241
- Newell, K. M. (1996). Change in movement and skill: Learning, retention, and transfer. In M. L. Latash, M. T. Turvey, & N. A. Bernshteĭn (Eds.), Dexterity and its development (pp. 393–429). Erlbaum Associates.
- Newell, K. M., & Carlton, M. J. (1987). Augmented information and the acquisition of isometric tasks. Journal of Motor Behavior, 19(1), 4–12. https://doi.org/10.1080/00222895.1987.10735397
- Newell, K. M., Carlton, M. J., & Antoniou, A. (1990). The interaction of criterion and feedback information in learning a drawing task. Journal of Motor Behavior, 22(4), 536–552. https://doi.org/10.1080/00222895.1990.10735527
- Newell, K. M., & Hancock, P. A. (1981). Kinematic and kinetic parameters as information feedback in the acquisition of man-machine skills. Proceedings of the Human Factors Society Annual Meeting, 25(1), 671–675. https://doi.org/10.1177/1071181381025001177
- Newell, K. M., Morris, L. R., & Scully, D. M. (1985). Augmented information and the acquisition of skill in physical activity. Exercise and Sport Sciences Reviews, 13, 235–261. https://doi.org/10.1249/00003677-198500130-00009
- Newell, K. M., Quinn, J. T., & Carlton, M. J. (1987). Kinematic information feedback and task constraints. Applied Cognitive Psychology, 1(4), 273–283. https://doi.org/10.1002/acp.2350010406
- Newell, K. M., & Walter, C. B. (1981). Kinematic and kinetic parameters as information feedback in motor skill acquisition. Journal of Human Movement Studies, 7(4), 235–254.
- Pacheco, M. M., Lafe, C. W., & Newell, K. M. (2019). Search strategies in the perceptual-motor workspace and the acquisition of coordination, control, and skill. Frontiers in Psychology, 10(1874), https://doi.org/10.3389/fpsyg.2019.01874
- Pacheco, M. M., & Newell, K. M. (2018). Search strategies in practice: Influence of information and task constraints. Acta Psychologica, 182, 9–20. https://doi.org/10.1016/j.actpsy.2017.11.004
- Rohde, M., Narioka, K., Steil, J. J., Klein, L. K., & Ernst, M. O. (2019). Goal-related feedback guides motor exploration and redundancy resolution in human motor skill acquisition. PLoS Computational Biology, 15(3), e1006676. https://doi.org/10.1371/journal.pcbi.1006676
- Salmoni, A. W., Schmidt, R. A., & Walter, C. B. (1984). Knowledge of results and motor learning: A review and critical reappraisal. Psychological Bulletin, 95(3), 355–386. https://doi.org/10.1037/0033-2909.95.3.355
- Schmidt, R. A. (1975). A schema theory of discrete motor skill learning. Psychological Review, 82(4), 225–260. https://doi.org/10.1037/h0076770
- Schmidt, R. A., & Young, D. E. (1991). Methodology for motor learning: A paradigm for kinematic feedback. Journal of Motor Behavior, 23(1), 13–24. https://doi.org/10.1080/00222895.1991.9941590
- Sharma, D. A., Chevidikunnan, M. F., Khan, F. R., & Gaowgzeh, R. A. (2016). Effectiveness of knowledge of result and knowledge of performance in the learning of a skilled motor activity by healthy young adults. Journal of Physical Therapy Science, 28(5), 1482–1486. https://doi.org/10.1589/jpts.28.1482
- Sigrist, R., Rauter, G., Riener, R., & Wolf, P. (2013). Augmented visual, auditory, haptic, and multimodal feedback in motor learning: A review. Psychonomic Bulletin & Review, 20(1), 21–53. https://doi.org/10.3758/s13423-012-0333-8
- Skinner, B. F. (1954). The science of learning and the art of teaching. Harvard Educational Review, 24, 86–97.
- Smith, P. J., Taylor, S. J., & Withers, K. (1997). Applying bandwidth feedback scheduling to a golf shot. Research Quarterly for Exercise and Sport, 68(3), 215–221. https://doi.org/10.1080/02701367.1997.10608000
- Sterne, J. A. C., Hernán, M. A., Reeves, B. C., Savović, J., Berkman, N. D., Viswanathan, M., Henry, D., Altman, D. G., Ansari, M. T., Boutron, I., Carpenter, J. R., Chan, A.-W., Churchill, R., Deeks, J. J., Hróbjartsson, A., Kirkham, J., Jüni, P., Loke, Y. K., Pigott, T. D., … Higgins, J. P. T. (2016). ROBINS-I: A tool for assessing risk of bias in non-randomised studies of interventions. BMJ, 355, i4919. https://doi.org/10.1136/bmj.i4919
- Sterne, J. A. C., Savović, J., Page, M. J., Elbers, R. G., Blencowe, N. S., Boutron, I., Cates, C. J., Cheng, H. Y., Corbett, M. S., Eldridge, S. M., Emberson, J. R., Hernán, M. A., Hopewell, S., Hróbjartsson, A., Junqueira, D. R., Jüni, P., Kirkham, J. J., Lasserson, T., Li, T., … Higgins, J. P. T. (2019). Rob 2: A revised tool for assessing risk of bias in randomised trials. BMJ, 366, l4898. https://doi.org/10.1136/bmj.l4898
- Swinnen, S. P., Walter, C. B., Lee, T. D., & Serrien, D. J. (1993). Acquiring bimanual skills: Contrasting forms of information feedback for interlimb decoupling. Journal Of Experimental Psychology. Learning, Memory, And Cognition, 19(6), 1328–1344. https://doi.org/10.1037//0278-7393.19.6.1328
- Swinnen, S. P. (1996). Information feedback for motor learning: A review. In H. N. Zelaznik (Ed.), Advances in motor learning and control (pp. 37–66). Human Kinetics.
- Thomson, H. J., & Thomas, S. (2013). The effect direction plot: Visual display of non-standardised effects across multiple outcome domains. Research Synthesis Methods, 4(1), 95–101. https://doi.org/10.1002/jrsm.1060
- Thorndike, E. L. (1913). Educational psychology (Vol. 2). Teachers College, Columbia University.
- Triano, J. J., Descarreaux, M., & Dugas, C. (2012). Biomechanics – Review of approaches for performance training in spinal manipulation. Journal of Electromyography and Kinesiology, 22(5), 732–739. https://doi.org/10.1016/j.jelekin.2012.03.011
- van Dijk, H., Mulder, T., & Hermens, H. J. (2007). Effects of age and content of augmented feedback on learning an isometric force-production task. Experimental Aging Research, 33(3), 341–353. https://doi.org/10.1080/03610730701319194
- Wulf, G., & Schmidt, R. A. (2014). Feedback. In R. C. Eklund, & G. Tenenbaum (Eds.), Encyclopedia of sport and exercise psychology (pp. 288–291). SAGE Publications.
- Wulf, G., Shea, C., & Lewthwaite, R. (2010). Motor skill learning and performance: A review of influential factors. Medical Education, 44(1), 75–84. https://doi.org/10.1111/j.1365-2923.2009.03421.x
- Wulf, G., & Shea, C. H. (2004). Understanding the role of augmented feedback: The good, the bad and the ugly. In A. M. Williams, & N. J. Hodges (Eds.), Skill acquisition in sport: Research, theory and practice (pp. 121–144). Routledge.
- Yang, J. F., & Scholz, J. P. (2005). Learning a throwing task is associated with differential changes in the use of motor abundance. Experimental Brain Research, 163(2), 137–158. https://doi.org/10.1007/s00221-004-2149-x
- Young, D. E., & Schmidt, R. A. (1992). Augmented kinematic feedback for motor learning. Journal of Motor Behavior, 24(3), 261–273. https://doi.org/10.1080/00222895.1992.9941621
- Zhu, B., Kaber, D., Zahabi, M., & Ma, W. (2019). Effects of feedback type and modality on motor skill learning and retention. Behaviour and Information Technology, 39(4), 431–442https://doi.org/10.1080/0144929X.2019.1599068.