
Abstract
Real-time people localization cannot be achieved through statistical methods during crisis/emergency management events. An International Mobile Subscriber Identity (IMSI) catcher was proposed as a nontraditional method for cell phone-based people localization. We verified the idea of using a cell phone as a sensor and tested the possibility of transmitting cell phone data through the Open Geospatial Consortium (OGC) Sensor Web Enablement. Four large field tests were performed and are described in detail. The main conclusions for IMSI catcher deployment were search within a limited radius from its placement and the number of localized people was not a limiting aspect; although the technology for advanced cell phone-based localization is available for crisis/emergency management applications, we do not yet have sufficient ability to handle this technology.
Introduction
An emergency response often starts with a witness's phone call to an ambulance, fire, and rescue service, a police station, or an integrated rescue center. Emergency numbers (e.g. 911 in the United States, 000 in Australia, and 112 in many other countries) may typically be dialed free of charge from any telephone or cell phone, even if the telephone is blocked. Cell phones may be used in all phases of emergency management ().
On the other hand, cell phone localization concept is considered as a part of the Digital Earth (DE) Framework. In 1998, United States Vice President Al Gore stated: ‘The hard part of taking advantage of this flood of geospatial information will be making sense of it – turning raw data into understandable information.’ Observed intensive growth of the DE concept arose from test beds in government, industry, and academia. Cell phone localisation including the processing of the flood of information that originates from such concept as well as its test beds in the form of field testing are therefore the primary aims of this paper.
The process of locating people through their cell phones, or cell phone localization, requires at least three technologies:
Mass storage: The DE concept may be enriched for storing data concerning the real-time locations of people obtained from cell phones. Large storage capabilities enable the processing of large data-sets, such as the movement patterns of people in space and time.
Broadband networks: Operating a digital globe requires broadband networks. Various subsystems, like people localization, should be connected to high-speed networks to enable sharing among other (sub)systems and components in crisis and emergency management.
Interoperability: Data on people localization must be able to be shared through broadband networks. The Sensor Web Enablement (SWE) family of standards from the Open Geospatial Consortium (OGC) seems as to be the most promising candidate to exchange such data.
During crises and emergencies, decision-makers must have information on the location of people in the affected area. However, in most cases, estimates and population distributions must serve as a proxy for real numbers. Although such estimates may be based on several data sources, they are mainly derived from statistical (census) data, which may be used ‘as is’ in emergency situations (e.g. see Staněk et al. Citation2010). Statistically derived population distribution data can alternatively be redistributed into a data-set that is not dependent on statistical units. Probably, the most used algorithm for this application is a pycnophylactic interpolation for geographic regions, as developed by Tobler (Citation1979). This algorithm has several advantages: it performs explicit transformations, preserves the sum value for each geographic region, and retains the possibility of recomputing the original data from the created contour map.
Both approaches (i.e. directly using and recomputing population distribution data) assume that people have their current location listed in the statistical data. However, the statistical data may also be designated as the ‘night population,’ because people commute to/from work, school, social activities, etc., during the day. Some studies have demonstrated that this change may be up to 80% of people living in an urbanized area (see Frias-Martinez et al. Citation2010).
There are also limitations regarding how (statistical) data can be used. Brázdil et al. (Citation2011) described how natural and anthropogenic factors combine and affect statistical data during a crisis situation. User requirements on statistical data were analyzed by Konecný et al. (Citation2011). Talhofer et al. (Citation2009) further evaluated the integration of spatial data on the basis of data with similar errors. Finally, Horák et al. (Citation2012) considered the limitations of effective statistical data transmission. The various studies showed that statistical data only have limited use in crisis management applications that occur during the daytime. Methods are needed for discovering the pattern of people localization in time, to provide decision-makers in crisis and emergency management with accurate information.
Emergency support system
Abnormal events, crises, disasters, and catastrophes are frequent occurrences in modern societies. Such events are marked by threats to societal values and/or life-sustaining functions. They create an urgent need to respond under conditions of extreme uncertainty. Without accurate information, crisis managers find it hard to make fast and correct decisions: an absence of reliable information tends to have a paralyzing effect on decision-makers in a crisis situation. The risk of making decisions based on partial, nonverified information may have unintended effects, which may fuel rather than dampen the crisis and, thus, delay decision-makers from taking necessary steps.
The Emergency Support System (ESS Project Citation2009, http://www.ess-project.eu) is a European 7th Framework program (7FP) project with funding from 2009 to 2013. The ESS includes a suite of real-time, spatial, data-centric technologies which aimed to aid decision-makers during crisis management situations by locating people during crises/emergencies. This aim differentiates the ESS from other crisis and emergency management systems. The 19-partner ESS consortium has sought to develop a crisis communication system that can reliably transmit filtered and reorganized information streams to crisis command systems, providing relevant and necessary information for making critical decisions. Information streams in ESS are organized so as to be easily enhanced and combined with other available applications and databases. The ESS provides an open Application Programming Interface that allows any public authority to add more applications customized to his/her particular needs. ESS data, functionalities, and data flow are based on International Organization for Standardization (ISO), Open Geospatial Consortium (OGC), World Wide Web Consortium (W3C), and industrial standards. Each application that has adopted or will adopt these standards is able to connect to the ESS (e.g. Casola et al. Citation2010 or Ortlieb, Reinhardt and Trauner Citation2010).
To validate the system, ESS must be tested under different scenarios to assess the system's capabilities in different kinds of crises using various collection tools. In cooperation with end-users of crisis systems, four field tests were undertaken of the ESS. These tests included a proof-of-concept field test, an abnormal event in a crowded stadium, a heavy truck accident in a tunnel, and an airplane crash in a forested area.
Methods of cell phone-based localization
The cell phone-based localization method is a recently introduced approach for determining where people are located during emergencies (e.g. Otsason et al. Citation2005). The basic limitation of this method is that it is only applicable for people who are carrying cell phones during a crisis event.
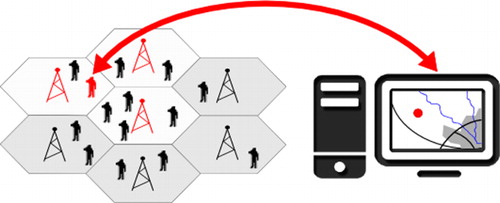
The traditional/conventional method of cell phone localization is demonstrated in . The cellular network is composed of regular hexagons, each of which belongs to exactly one base transceiver station (BTS). Conventional methods of cell phone localization use the known position of the BTSs to determine the location of the cell phone. Three levels of complexity exist in conventional cell phone localization:
The position of the cell phone can be assigned according to the position of the nearest BTS, with a precision of localization ranging from several kilometers in nonurbanized areas to hundreds or dozens of meters in urbanized areas.
The position of the cell phone can be computed as the mean position of the three nearest BTSs (highlighted in red in ).
The position of the cell phone can be computed as the weighted mean position of (usually) the three nearest BTSs. The weights used for this computation may vary.
Alternatively, nonconventional methods of a cell phone localization can be used. In particular, an International Mobile Subscriber Identity (IMSI) catcher is a crucial component of the ESS for obtaining real-time information on people presence. The IMSI catcher acts as a false BTS between the target cell phone(s) and the real BTS (of a public operator). The IMSI catcher follows the principle that any cell phone must contact a reachable BTS and chooses the nearest BTS according to the time signal measurement. The Global System for Mobile communication (GSM) specification requires a cell phone to authenticate to the cell phone network, but does not require the cell phone network to authenticate to the cell phone. The IMSI catcher uses this security hole to communicate with the cell phone, and may not allow connecting to another (public) BTS. A private cellular network may be established between the IMSI catcher and the cell phone(s) in the affected area. At the same time, the IMSI catcher logs the IMSI numbers of all cell phones in the area ().
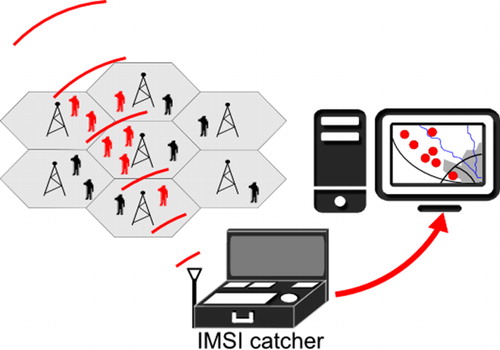
Through this connection, emergency messages (e.g. SMSs) may be sent to any or all cell phone(s) in the affected area. The IMSI catcher also gathers data about IMSI and International Mobile Equipment Identity (IMEI) numbers, which encode unique information about the cell phone. The IMSI is the unique identification number of the subscriber identity module (SIM) card, which identifies the public cell phone number, number of the SIM card, date of issue, mobile operator, etc. The IMEI is the unique identification number of the cell phone, which may be decoded into the human-readable name of the cell phone, including the type and version. For instance, the IMEI number may provide information that the targeted cell phone is a Samsung Galaxy SIII.
Using an IMSI catcher is considered to be a ‘man in the middle’ (MIM) attack. As such, it cannot be generally used in many countries, including within the whole European Union, without special permission. Rules for operating an IMSI catcher vary from country to country.
IMSI catcher data processing
The IMSI catcher is a crucial ESS component for obtaining real-time information on people presence. Because the IMSI catcher is not a common component of contemporary emergency and crisis management systems, its use highlights one of the main differences between the ESS and other supporting systems for crisis events. The IMSI catcher does not determine the exact location of a cell phone, but rather its approximate distance from the catcher within a certain angle of view: namely, per sectors of 550 m in length for the GSM network or ∼50 m for Universal Mobile Telecommunication System (UMTS): depending on the network type.
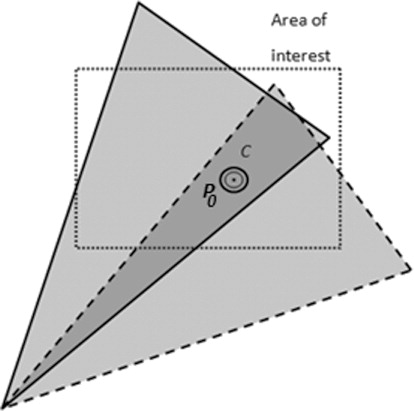
For example, as depicted in , an IMSI catcher may find that phone C2 is located at a distance of 1100–1650 m from the catcher position P0. The phone's location in space must be calculated according to additional known attributes. The catcher is directed to azimuth A and covers the triangle area given by angle of view F. By knowing the distance range of a phone, the area in which it is located can be determined. For example, in the case of phone C2, the area is bounded by a polygon given by points P3, P4, P5, and P6. The greater the distance is between the IMSI catcher and the phone, the more extensive the area will be for the location of the phone.
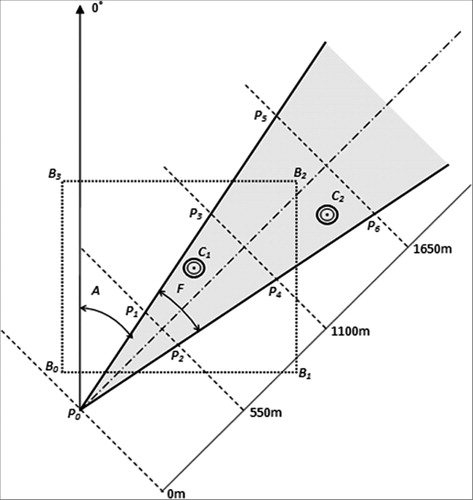
The number of people in a given area is determined from the calculation of intersections between the area of interest and areas where phones are identified. For example, suppose that there is a need to determine the number of phones in a rectangular area given by vertices B0, B1, B2, and B3. Areas that intersect the area of interest are searched. In this case, there are three areas: P0–P2, P1–P4, and P3–P6, corresponding to distance ranges 0–550 m, 550–1100 m, and 1100–1650 m, respectively. There is no phone in the area P0–P2. The next two areas each contain one phone. The area P1–P4 is fully covered by the area of interest; thus, phone C1 is certainly located in the area of interest. The area P3–P6 is not fully covered by the area of interest. Thus, the possibility that phone C2 is located in the area of interest can be expressed only with a lower degree of certainty, given by the ratio of the surface of area P3–P6 to the surface of its intersection with the area of interest (i.e. ratio = 0.37). As a result, the area of interest contains 1.37 phones.
Note that the azimuth of the IMSI catcher can be changed to cover a broader area. The change of azimuth is usually smaller than the angle of view, to ensure that the whole area is covered. As a result, overlapped areas are scanned by the IMSI catcher (), and the same phone C can be detected in more than one area. To obtain correct results, such possibilities must be eliminated, for example, by eliminating duplicate cell phones according to a unique identifier (i.e. an IMSI number).
The calculation of the people density in an area is based on the presumption that each person has his/her own cell phone. Thus, the number of phones detected in the area corresponds to the number of people in the area. The people density D of an area A can be easily calculated using formula (Equation1) below, where PA is a cell phone in area A and EA is the extent of area A.
The ESS collects people presence data with the IMSI catcher, processes the data internally, and publishes them via the OGC Web Feature Service (WFS) interface. WFS publication is aimed at both the ESS client application (called the ESS Portal) as well as external command and control systems.
Standardized transmission of cell phone data
Spatial data, including cell phone localization data, must be standardized to achieve interoperability (Gore Citation1998). Because cell phone data may be understood as a kind of sensor data, we can apply the SWE concept of the Open Geospatial Consortium (OGC) (see Botts et al. Citation2008, for further information on SWE). The Sensor Observation Service (SOS) is the basic service to transmit cell phone data when using the OGC SWE data models. The ESS architecture follows the so-called service-oriented architecture, which enables communication between and beyond the ESS modules. Such communication is based on the SWE family of standards, as depicted in .
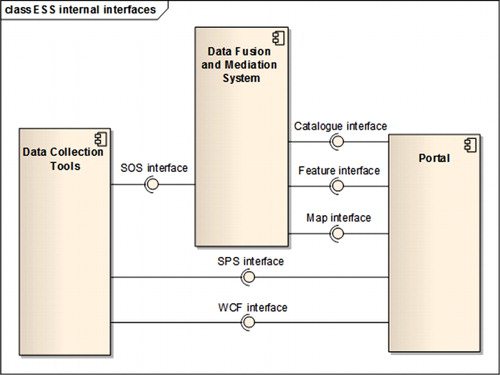
Real-time data obtained from sensors (e.g. data from an IMSI catcher) are stored in the ESS data store. Each sensor plugged into the ESS should contain Inca2 hardware (Global Positioning System [GPS] receiver and modem), which coordinates communication between the ESS components: namely, data collection tools, the data fusion and mediation system, and the portal. Such communication goes through common communication channels, such as General Packet Radio Station (GPRS), Terestrial Trunked Radio (TETRA), analog radio, etc., to servers in near real-time. These messages are comprised of location data, a GPS satellite timestamp (Universal Time Coordinated [UTC]), and I/O readings from integrated hardware. They can include a payload of additional data from devices attached to the Inca2 via Transmission Control Protocol/Internet Protocol (TCP/IP), Universal Serial Bus (USB), or RS-232 serial. The size of this payload is restricted by the conditions of the communication channel.
The SOS server encodes the readings into a extensible markup language (XML)-based one (i.e. SensorML) and offers these sensor data to the SOS client that is located in the data fusion and mediation system, which, in turn, parses the incoming XML source code into two parts:
Sensor measurements, which are stored in the ESS data store and published via the feature interface to the portal.
Sensor metadata, which are stored in the ESS Catalog database to the Portal.
Field tests
Four large field tests were conducted at various locations in Europe to demonstrate and validate the developments in the ESS. Precise operational scenarios were elaborated by the consortium partners to verify the ESS in the context of real crises. Natural and technological hazards were selected to simulate real-life crisis situations. The IMSI catcher was used in all field tests, except for the last one, to detect people presence and to send messages to people in the affected area. Detailed descriptions of the field tests cannot be provided due to the limited extent of this paper, which focused specifically on issues related to people localization through the IMSI catcher.
Proof-of-concept field test
The proof-of-concept field test of the ESS was performed from 7 to 10 June 2010 at the Bengener Heide airfield in Bad Neuenahr, Germany. The field test consisted of system installation and testing, a ‘dry run’ of the scenario, demonstration to an independent observer, and internal evaluation. The scenario of the field test focused on an accident in which burning containers, containing possibly toxic materials, had fallen from a van or truck.
The emergency proceeded as follows. At 11:00, a person at the front end called 112 and reported the accident. At 11:10, the officer-in-charge received sensor information about the toxic compound. The areal locations of hazardous atmospheres (ALOHA) system was used to predict the size of the toxic cloud. At 11:14, the incident commander instructed the officer-in-charge to mark the hot and warm zones according to the results of the ALOHA model and asked the police to block the motorway. At 11:30, the incident commander was notified via the ESS portal that cell phones had been detected in the hot zone. At 11:35, the incident commander activated Short Message Service (SMS) alerts to the cell phones detected in the hot zone, instructing the users to move away immediately. The unmanned ground station (UGS) video detected one person in a car on the runway. At 11:37, the incident commander checked data from the sensors. The chemical sensor data did not exceed threshold values; therefore, the fire brigade was told to start extinguishing the fire. At 12:01, an alarm was given that, according to the values obtained from an ESS chemical sensor, a threshold value was exceeded. Colored smoke was seen on the UGS video. The incident commander instructed the fire fighters to stop fighting the fire and to treat the toxic leakage. At 12:05, the sensor values again registered below the threshold value, and the incident commander instructed the fire brigade to resume fire fighting. At 12:15, a final check via the ESS equipment confirmed that all values were within the normal range.
The first field test revealed that hardware and software integration was not the biggest obstacle for successful implementation of ESS. Permissions from several authorities were needed to conduct some of the tests – especially permissions to operate the IMSI catcher, permission for the unmanned aerial vehicle (UAV) to fly in the specified area, etc. Unfortunately, permission to operate the IMSI catcher in a commercial phone network was not granted (in Germany, such permission is subject to legal adjudication); therefore, the whole scenario was tested using private cell phones from members of the ESS consortium. The German Bundesnetzagentur (Federal Network Agency) monitored the use of the IMSI catcher in a preliminary test, as well as during the field test. More information on the proof-of-concept field test, including the detailed scenario, is provided by Řezník et al. (Citation2011).
Evacuation of the soccer stadium
The second field test took place in the city of Nîmes in southern France on 24 March 2012. The test simulated conditions of heavy flooding that appeared in the city in the years 1986, 1988, and 2005. The scenario precisely followed the data that were available for the flood in 2005.
The scenario proceeded as follows. Heavy rain falls and storms appeared at 18:00 in the Gard department in southern France. Fire-fighting authorities received a phone call from the Météo France on the severe weather situation. After the weather situation was analyzed and a high probability of ‘flash floods’ was determined, an ‘orange alert’ was announced. Accordingly, the fire-fighting authorities required ESS deployment at the Costières stadium, where a soccer game was soon to begin.
At 18:15, the liaison between the fire-fighting authorities, police, and local administration was established. At 18:30, video and data from the air balloon meteorological sensors of the ESS became available. Two IMSI catcher devices were mounted on the stadium towers. At 19:30, the first spectators arrived at the stadium. Water level sensors connected to the ESS were installed in the water and drainage pipes. At 20:00, the soccer game began. The rain gradually intensified a few minutes after the soccer game had started. At 20:15, a ‘flash flood’ arrived at the city of Nîmes. Text messages from the IMSI catcher in the northwest and southeast towers were sent to the audience to inform them about the situation. The primary aim was to evacuate the spectators and players to a safe area.
Because water on the roads had begun to generate traffic problems, estimates of people presence were needed. Statistical data were meaningless for evacuation planning in this crisis situation. According to census data and other statistical sources, there should not be any people in the stadium; however, there were between 4000 and 5000 spectators at the real soccer match in 2005 (the precise number of the people in the stadium was never determined). During the simulation of this scenario in March 2012, only 544 of people were included. By 20:40, the traffic plan had been prepared and the evacuation began. The evacuation ended at 22:15, when the people were relocated to safe places. In total, 42 crisis management actions were conducted during this scenario.
Heavy truck accident in a tunnel
The third field test was conducted between 19 and 22 June 2012 in France. The scenario was carried out near the city of Sisteron, about 100 km north of Marseille. The operational scenario for this field test included the traffic accident of a heavy truck containing hazardous materials in a tunnel, the evacuation of drivers and passengers from the tunnel, the leakage of hazardous chemical material from the truck and into the Durance river, as well as communication, cooperation, and coordination among different emergency management entities (e.g. ambulance, fire fighters, and public administration).
According to the scenario, an accident occurred at 14:00 in the Baume tunnel, which is located on highway A51. The tunnel is 450 m long with 0.25% descent in the direction of Gap/Aix-en-Provence. At 14:05, information on the accident arrived from first responders to the fire-fighting authorities of Sisteron, which sent the first level of intervention. The liaison between the fire-fighting authorities, police, and local administration was established at 14:10. Evaluation of the situation from the first level of intervention occurred from 14:20 to 14:25. Evacuation of people from the tunnel was part of the first level of intervention. Fire fighters and local administration initially protected the incident area by setting up roadblocks and foam nozzles near the north and south entrances ().

People in the tunnel could not be seen due to the presence of smoke. Therefore, IMSI catcher deployment was requested at 14:45 to estimate whether there were still people in the tunnel or hot zone near the tunnel. Experience showed that one IMSI catcher device was sufficient to monitor the 450-m space of the tunnel. Evacuation information was not sent through text messages to cell phones located in the tunnel. Fire and smoke after the truck accident made it hard for people to orient in the tunnel. Thus, it was determined that any information from a text message on the evacuation route would be meaningless in this case and would not help the endangered people to handle the situation. As in other crisis situations, fire fighters played an irreplaceable role in the life-saving process. At 15:00, complete information was received from the IMSI catcher and from other ESS equipment (i.e. weather and radiological sensors, air balloon, UAV, etc.). Obtained data were processed in the ESS modules, including ALOHA for the atmospheric dispersion and chemical sensors detecting the contamination of the Durance River. At 15:15, a dam and product recovery apparatuses were set up. The exercise ended at 18:00, when the crisis situation was handled. In total, 25 crisis management actions were conducted during this scenario.
Airplane crash in a forested area
The fourth field test was realized between 3 and 4 April 2013. The scenario consisted of an aircraft crash and forest fire field test for an area on the French-Italian border between the villages of Sospel (on the French side) and Vescavo (on the Italian side). An important aspect of this field test was cross-border cooperation, which was tested for the first time within the ESS project. Unfortunately, an IMSI catcher was not operated during this last field test due to organizational and legal obstacles. Therefore, the following text describes the theoretical use of an IMSI catcher in the scenario.
An airplane crashed in the Vescavo pass at 10:00. French fire authorities (CODIS) were alerted by the Direction Générale de l'Aviation Civile (DGAC) about the disappearance of a civil airplane, model DASH 8, at the French/Italian border. DGAC informed CODIS that this airplane had five persons on board and was in charge of chemical transport. At the same time, multiple phone calls from civilians were made about the airplane crash near Vescavo pass. At 5 minutes after the accident, an UAV drone was ordered to identify the position of the aircraft. At 10:20, CODIS contacted the Italian fire-fighting authorities. Communication between the French and Italian fire-fighting authorities, police, and local administration was established at 10:30. Sectoring of the crisis area was done between French and Italian means. At 11:00, the UAV sent video of the fire location, and the search for victims of an accident was initiated.
An ALOHA simulation was performed, which identified a house located near the fire line. The IMSI catcher was deployed at 11:05 to evaluate the people presence. In the scenario, two cell phones were identified in the house near the area of the accident. The IMSI catcher was used to inform the people in the house through text message, which informed them to stay where they were and notified them about the coming rescue team. People located through the IMSI catcher were confirmed with the UAV. At 11:50, the evacuation of victims was completed.
At 12:45, a French vehicle was encircled by the flames after the airplane crash inside the Italian territory; the driver of this vehicle sent an SOS through the French and Italian frequencies, with coordinates received from the GPS receiver. The last rescue operation was successfully finished at 13:00, which marked the end of this exercise. In total, 33 crisis management actions were conducted during this scenario.
Conclusions and future work
The ESS offers several benefits, such as interoperability with existing command and control systems, the ability to turn raw data into understandable information, a bottom-up channel to authorities, autonomous internet access deployment in mountainous areas, real-time exchange of maps and data between services, and support links at different scales between countries. Developments in the ESS project and conducted field tests have proven the applicability of cell phone-based people presence localization in common crisis and emergency situations. Even switched off cell phones were localized until the battery was removed. Moreover, (emergency) calls from a cell phone may be blocked by the IMSI catcher. It was also possible to distinguish between rescuers and people involved in a crisis situation on the basis of IMSI (and IMEI) numbers. However this method does have some disadvantages, the main one being that localization through an IMSI catcher can only be used to locate individuals with cell phones. Furthermore, special permissions are needed to operate the IMSI catcher in several countries. This consideration is a major barrier, because such permissions cannot be granted at the time of the crisis/emergency situation.
From a technical perspective, another disadvantage is that one IMSI catcher can only search within a radius of between 2 and 5 km from its placement. For a wider incident area, additional IMSI catchers will have to be used. The soccer stadium evacuation field test showed that hundreds of people (specifically, 544 people) were successfully localized at the same time; thus, the number of people was not a limiting aspect. We assume that thousands of people may be localized simultaneously, although the IMSI catcher was not tested at a real match, at which several thousand spectators may be present. The IMSI catcher was successfully used in the 450-m-long tunnel without any functional limitation. Another technical limitation is that we cannot obtain the true number of people in the incident area, only an approximation, according to the signal strength and distance between a cell phone and the IMSI catcher.
We tried to transmit cell phone data through the OGC SOS. However, this attempt was not successful, due to the large size of the XML documents that were created. As such, the concept of SWE SOS was abandoned. We have instead published cell phone data in the form of Geography Markup Language through the OGC Web Feature Service, to support interoperability between the ESS and external command and control systems or other DE components. Further work should therefore be on XML compression techniques, like XML Character Data (CDATA) or Efficient XML Interchange (EXI).
Experiences from real crisis/emergency management situations have indicated that the behaviors of people in the incident area may be an even bigger limitation than any technical limitation. As an example, we consider the catastrophic fireworks explosion that occurred in 2000 in the city of Enschede of the Netherlands. Twenty-three people (including firemen) were killed, and 947 people were injured. The number of injured people was so high because of the inquisitiveness of people in the affected area. When the explosion started, people were attracted to see the crisis/emergency situation first hand. Unfortunately, a much stronger explosion happened when the people came closer to the incident area. For that reason, we may suppose that increased real-time information about the incident, such as is enabled by the IMSI catcher, may increase the number of victims in some situations.
To summarize, although the technology for advanced cell phone-based localization is available for crisis/emergency management applications, we do not yet have sufficient ability to handle this technology.
Additional information
Funding
References
- Botts, M., G. Percivall, C. Reed, and J. Davidson. 2008. “OGC® Sensor Web Enablement: Overview and High Level Architecture.” In Lecture Notes in Computer Science, edited by S. Nittel, A. Labrinidis, and A. Stefanidis, 175–190. Berlin: Springer.
- Brázdil, R., L. Řeznícková, H. Valášek, M. Havlícek, P. Dobrovolný, E. Soukalová, T. Řehánek, and H. Skokanová. 2011. “Fluctuations of Floods of the River Morava (Czech Republic) in the 1691–2009 Period: Interactions of Natural and Anthropogenic Factors.” Hydrological Sciences Journal 56 (3): 468–485. doi:10.1080/02626667.2011.564175.
- Casola, V., L. D'Onofrio, G. Di Lorenzo, and N. Mazzocca. 2010. “A Service-based Architecture for the Interoperability of Heterogeneous Sensor data: A Case Study on Early Warning.” In Geographic Information and Cartography for Risk and Crisis Management – Towards Better Solutions, edited by M. Konecny, S. Zlatanova, and T. L. Bandrova, 249–263. Heidelberg: Springer.
- ESS Project. 2009. Tel Aviv: ESS Consortium. Online [cited 2012–05–11]. http://www.ess-project.eu.
- Frias-Martinez, V., J. Virsena, A. Rubio, and E. Frias-Martinez. 2010. “Towards Large Scale Technology Impact Analyses: Automatic Residential Location from Mobile Phone-Call Data.” In Proceedings of International Conference on Information & Communication Technologies and Development ICTD, 10 p. London.
- Gore, A. 1998. The Digital Earth: Understanding our planet in the 21st Century. [ Cited 2013–05–24]. http://www.isde5.org/al_gore_speech.htm.
- Horák, J., J. Ružicka, J. Novák, J. Ardielli, and D. Szturcová. 2012. “Influence of the Number and Pattern of Geometrical Entities in the Image upon PNG Format Image Size.” In Lecture Notes in Computer Science (including subseries Lecture Notes in Artificial Intelligence and Lecture Notes in Bioinformatics), edited by D. Hutchison, T. Kanade, J. Kittler, J. M. Kleinberg, A. Kobsa, F. Mattern, J. C. Mitchell, et al., 448–457. Berlin: Springer.
- Konecný, M., P. Kubícek, Z. Stachon, and Č. Šašinka. 2011. “The Usability of Selected Base Maps for Crises Management – Users’ Perspectives.” Applied Geomatics 3: 189–198. doi:10.1007/s12518-011-0053-1.
- Ortlieb, E., W. Reinhardt, and F. X. Trauner. 2010. “Development of a Coupled Geoinformation and Simulation System for Early Warning.” In Geographic Information and Cartography for Risk and Crisis Management – Towards Better Solutions, edited by ?M. Konecny, S. Zlatanova, and T. L. Bandrova, 265–272. Heidelberg: Springer.
- Otsason, V., A. Varshavsky, A. LaMarca,and E. de Lara. 2005. “Accurate GSM Indoor Localisation.” In Lecture Notes in Computer Science: UbiComp 2005, Ubiquitous Computing, edited by M. Beigl, 141–158. Berlin: Springer.
- Řezník, T., B. Horáková, and D. Janiurek. 2011. “Emergency Support System: Actionable Real-time Intelligence with Fusion Capabilities and Cartographic Displays.” Advances in Military Technology 6 (2):83–97.
- Staněk, K., L. Friedmannová, P. Kubícek, and M. Konecný 2010. “Selected Issues of Cartographic Communication Optimization for Emergency Centers.” International Journal of Digital Earth 3 (4):316–339. doi:10.1080/17538947.2010.484511.
- Talhofer, V., Š. Hošková, A. Hofmann, and V. Kratochvíl. 2009. “The System of the Evaluation of Integrated Digital Spatial Data Reliability.” In 6th Conference on Mathematics and Physics at Technical Universities, edited by P. Račková, J. Kuben, R. Potůček, and Š. Hošková-Mayerová, 281–288. University of Defence: Brno.
- Tobler, W. R. 1979. “Smooth Pycnophylactic Interpolation for Geographical Regions.” Journal of American Statistical Association 74 (367): 519–536. doi:10.1080/01621459.1979.10481647.