
ABSTRACT
Spatiotemporal clustering is one of the most advanced research topics in geospatial data mining. It has been challenging to discover cluster features with different spatiotemporal densities in geographic information data set. This paper presents an effective density-based spatiotemporal clustering algorithm (DBSTC). First, we propose a method to measure the degree of similarity of a core point to the geometric center of its spatiotemporal reachable neighborhood, which can effectively solve the isolated noise point misclassification problem that exists in the shared nearest neighbor methods. Second, we propose an ordered reachable time window distribution algorithm to calculate the reachable time window for each spatiotemporal point in the data set to solve the problem of different clusters with different temporal densities. The effectiveness and advantages of the DBSTC algorithm are demonstrated in several simulated data sets. In addition, practical applications to seismic data sets demonstrate the capability of the DBSTC algorithm to uncover clusters of foreshocks and aftershocks and help to improve the understanding of the underlying mechanisms of dynamic spatiotemporal processes in digital earth.
1. Introduction
With acquisition of more diverse, dynamic and detailed spatiotemporal data owing to modern data collection methods, such as global positioning systems, high-resolution remote sensing, location-aware services and surveys, and Internet-based volunteered geographic information (Goodchild Citation2007), huge amounts of spatial data have been generated. How to rapidly mine useful information from the volume data for the digital earth applications has become the focus of digital earth research in the big data era (Craglia et al. Citation2012; Goodchild et al. Citation2012). Spatiotemporal data mining as an information extraction method has become an active research topic (Wang et al. Citation2011; Vahidnia et al. Citation2013; Matsuda, Yamaguchi, and Nishioka Citation2015; McArdle, Tahir, and Bertolotto Citation2015; Xue et al. Citation2015; Du et al. Citation2017; Yusof and Zuritamilla Citation2017) on digital earth. Spatiotemporal clustering, as one of the main tasks of spatiotemporal data mining (Miller and Han Citation2009), assigns spatiotemporal points with similar behaviors to the same group based on the spatiotemporal similarity to increase the differences between groups and narrow the differences within groups. Spatiotemporal clustering has been used for many digital earth application such as weather forecasting (Northrop Citation1998), disaster analysis (Fan, Wen, and Chen Citation2012), seismic analysis (Zaliapin et al. Citation2008; Guo Citation2012), traffic congestion forecasting (Woudsma et al. Citation2008; Liu, Fan, et al. Citation2014) and animal migration analysis (Elnekave, Last, and Maimon Citation2007).
Density-based clustering methods, as one of the main types of the existing spatiotemporal clustering methods, use a specified spatial radius, time window and density threshold to identify the core points and noises to build clusters (Ester et al. Citation1996; Kriegel et al. Citation2011).
Spatiotemporal density-based clustering extends the concept of spatial density-based clustering by collaborating with temporal components. It uses density-connected as the similarity measure among spatiotemporal points and treats spatiotemporal clusters as a series of high-density-connected regions divided by low-density (noise) regions. Besides, it can identify probable shape of data points. It also does not require the number of clusters as an initial parameter.
In literatures, Ester et al. (Citation1996) proposed the density-based spatial clustering of applications with noise (DBSCAN) clustering algorithm, which requires only two input parameter and can discover clusters of arbitrary shapes. DBSCAN defines Eps-distance, density-reachable and density-connected to assign points into clusters according to their densities. However, fixed Eps-distance cannot detect data sets with high different densities. Karami and Johansson (Citation2014) combined binary differential evolution and DBSCAN algorithm to simultaneously quickly and automatically specify appropriate parameter values for Eps and MinPts while varied densities problem still remained. Campello, Moulavi, and Sander (Citation2013) proposed an improved density-based, hierarchical clustering method, providing a clustering hierarchy to construct a simplified tree of significant clusters. This approach can easily extract the most significant clusters and find the globally optimal solution. Ana and Jain (Citation2003) proposed the evidence accumulation technique, which aimed to address the problem of robust clustering, to identify clusters with arbitrary shapes and arbitrary sizes, without using a priori information about the number of clusters. Biçici and Yuret (Citation2007) introduced the notion of local scaling in density-based clustering. The local maxima of density are discovered using a k-nearest neighbor (NN) density estimation and used as centers of potential clusters. This approach is similar with OPTICS (Ankerst et al. Citation1999) while OPTICS focuses on providing an augmented ordering of the data set representing its density-based clustering structure. This cluster-ordering contains information which is equivalent to the density-based clusterings corresponding to a broad range of parameter settings. Pei et al. (Citation2006) proposed a new approach to discover cluster features in overlaid spatial point processes based on the NN method and the concept of density-connected. This approach addresses the following two issues: first, the removal of noises can be achieved using the NN method; and second, the number of clusters can be determined by finding the density-connected clusters.
All the approaches discussed above consider only spatial. Wang, Wang, and Li (Citation2006) extended DBSCAN to the spatiotemporal domain and developed a new density-based clustering algorithm, ST-DBSCAN. Birant and Kut (Citation2007) also proposed a similar method. The difference is that Birant and Kut also consider the similarity of non-spatial attributes in the clustering procedure. The ST-DBSCAN method uses a spatiotemporal neighborhood, similar to the spatiotemporal scan method’s cylinder, to estimate the density of spatiotemporal points. ST-DBSCAN inherits the excellent properties of DBSCAN for finding spatiotemporal clusters of arbitrary shapes in the presence of noises without any data distribution assumptions. However, the ST-DBSCAN algorithm also inherits the deficiency of DBSCAN, which applies the global density threshold to data sets with both loose and tight clusters. Wang, Wang, and Li (Citation2006) introduced the time domain into spatial grid clustering and developed a method of spatiotemporal grid clustering, ST-GRID. ST-GRID divides the spatiotemporal space of the studied data set into a series of spatiotemporal cubes. The spatiotemporal cubes with high density are connected as clusters. In essence, ST-GRID and ST-DBSCAN have similar effects because of the similar ideas that they share.
Recently, Pei et al. (Citation2010) introduced the kth NN method (Byers and Raftery Citation1998) in the spatiotemporal clustering domain. They assumed that the points in the data set are distributed as two homogeneous Poisson point processes with two different rates. The high rate represents spatiotemporal clusters, whereas the low rate represents noises. They proposed the windowed kth nearest distance to distinguish clusters from noises and specified the mathematical underpinnings of the processes. Liu, Deng et al. (Citation2014) introduced the concept of shared NNs (Ertoz, Steinbach, and Kumar Citation2002) into ST-DBSCAN. They defined the spatiotemporal shared NN (STSNN) method combined with window k-NN. This STSNN algorithm can solve, to some extent, problems of clustering data sets with varied densities, but it considers isolated noise points as core points and thus may not generate optimal clusters.
In conclusion, the fixed Eps-distance methods exhibit the problem of misclassification due to existing of different spatiotemporal densities. The shared NN methods solve the problem to some extent except the misclassification of isolated noise points. Besides, a fixed time window similarly suffers from different temporal densities.
To overcome these problems, this paper presents an effective density-based spatiotemporal clustering algorithm (DBSTC). First, we proposed the concept of reachablefactor, which is used to measure the distance of the core point to the geometric center of its shared nearest neighborhood. Thus it can effectively solve the isolated noise point misclassification problem that exists in the shared NN methods. Second, we proposed an algorithm for the ordered reachable time window distribution (ORTWD) to calculate the reachable time window for each spatiotemporal point in a data set to solve the problem of classifying clusters with different temporal densities.
The rest of this paper is organized as follows. Section 2 presents basic concepts for detecting spatiotemporal clusters, describes the drawbacks of the existing density-based clustering algorithms. Section 3 presents our efforts to overcome these problems and explains our algorithm and determination of the input parameters in detail. In Section 4, a series of simulated and real seismic data sets are tested to demonstrate the effectiveness and advantages of the proposed algorithm. Finally, our conclusions and some directions for future works are given in Section 5.
2. Existing methods and problems
2.1. Existing basic concepts for detecting spatiotemporal clusters
To illustrate the spatiotemporal density defined by the shared NN method, some basic concepts are introduced below.
Definition 2.1:
Spatiotemporal neighborhood and STSNNs.
The spatiotemporal neighborhood of point p in data set D is a cylinder centered at p with a radius of ΔD and a height of 2ΔT. As shown in , ΔD is decided according to the spatial distance between p and its kth NNs, and ΔT is the time window of point p. The spatiotemporal neighborhood of point p is denoted by Np. Thus, for points p and q, their STSNNs are the points pi in the spatiotemporal neighborhood of both p and q defined by .
Figure 1. Illustration of the spatiotemporal neighborhood of point p.
Definition 2.2:
Spatiotemporal directly reachable and core point.
For two points p and q, if the number of STSNNs between them is larger than a specific threshold kt, then p and q are spatiotemporal directly reachable, which is denoted by p ↔ q. If the number of spatiotemporal directly reachable points from p is larger than a predefined threshold MinPts, p is a core point.
Definition 2.3:
Spatiotemporal reachable and spatiotemporal connected.
If there is a chain of points p1, … ,pi, … ,pn, where p1 is a core point and pi is spatiotemporal directly reachable from pi−1, then pn is spatiotemporal reachable from p1; this relationship is denoted by p1 → pn. If points p and q are both spatiotemporal reachable from a core point o, then p and q are defined as spatiotemporal connected; this relationship is denoted by p ∼ q.
Definition 2.4:
Spatiotemporal cluster.
A spatiotemporal cluster C is defined as a non-empty subset of data set D that satisfies the following requirements:
: if p ∈ C and p → q, then q ∈ C.
Definition 2.5:
Border point and noise.
A point p is a border point if it is not a core point but is spatiotemporal reachable from a core point. Noise is the set of points in the data set D that do not belong to any cluster Ci and is denoted by .
2.2. Problems with the existing approaches
2.2.1. Problem of data with different densities
Almost all density-based clustering methods use the fixed Eps-distance to determine the neighborhood of a point. Accordingly, the core point and density-reachable are determined by the fixed neighborhood when density-reachable is the key criterion to determine whether a point should be grouped into the cluster. These methods cannot solve the problem of clusters with different densities. As shown in , C1 and C2 are two clusters with different densities, and point O is noise. The spatial distances between any points and their NNs in C1 are greater than the spatial distance between C2 and O. Thus, the increase of Eps-distance to classify cluster C1 results in the merge of C2 and O. Otherwise, if we use a smaller Eps-distance to exclude point O from cluster C2, then the loose cluster C1 cannot be identified.
Figure 2. Limitation of Eps-distance methods.
Although Birant and Kut (Citation2007) proposed the notion of density_factor to evaluate the degree of different densities of clusters after classification, their proposal did not alleviate the problem demonstrated with the example above.
2.2.2. Problems with the shared NN methods
Liu, Deng et al. (Citation2014) introduced the shared NN method and developed the STSNN algorithm, which considers only the direct similarity between two spatiotemporal points and neglects their distribution. The shared NN method determines the core points according to the number of shared NNs and then classifies points if they are density-reachable. A point q is reachable from p if there is a path p1, … ,pn with p1 = p and pn = q. However, the shared NN method will mistakenly classify noise points as core points in some cases. shows two clusters, C1 and C2, and the isolated noise point O. P1 is a point that belongs to C2. In general, we set both MinPts and kt equal to 0.5k. Assume that P1 is the NN of O in cluster C2. Both k-NNs of O and P1 are in C2. The number of shared NNs of P1 and O is k − 1, which makes P1 and O spatiotemporal directly reachable from each other. By the same token, the second, third, … and kth NNs of O in cluster C2 have high possibility of sharing more than kt NNs with O, which makes O spatiotemporal directly reachable from those points. As a consequence, O has a high possibility of having more than MinPts spatiotemporal directly reachable points. Thus, the isolated noise point O can be easily misclassified as a core point. To solve this, we have to set MinPts and kt large enough. However, this kind of large setting will lead to inaccurate clustering results.
Figure 3. Limitation of the STSNN algorithm.
2.2.3. Problems with the fixed time window methods
STSNN uses the time window proposed by Pei et al. (Citation2010) to find k-NNs, which are generated by Tmin/wi, where Tmin is the time resolution of the data set and wi is defined by:Although Pei et al. considered the relationship between the density of identified features and the time window and adjusted ΔT according to the density of the data set, this fixed time window method cannot be applied to a data set that contains clusters with different temporal densities. As shown in , C1, C2 and C3 are three clusters with high temporal densities, whereas C4 is a loose one. O1 and O2 are noise points. If we use a small time window, C1 and C2 will be clustered appropriately, whereas C4 will be separated into several groups. If we choose a large time window for correctly classifying C4, then C1 and C2 will be merged into one cluster. O1 and O2 will be classified into C3 due to the spatial distances between O1, O2 and C3 although they are well-separated in the temporal domain.
Figure 4. Limitation of the fixed time window method.
3. Method
3.1. The ORTWD algorithm
The problem of misclassifying isolated noises arises due to misjudgment of core points. Thus, we refine the existing shared NN method by distinguishing reachablefactor.
Definition 3.1:
Spatiotemporal reachable neighborhood.
The neighborhood consisting of the points spatiotemporal reachable from point p is called the spatiotemporal reachable neighborhood of p and is denoted by STRN(p).
Definition 3.2:
Reachablefactor.
Let STRN(p)geocenter be the geometric center of all points in the spatiotemporal reachable neighborhood of p and STRN(p)mean be the mean distance of each point to STRN(p)geocenter in STRN(p). Reachablefactor is defined as follows:
If p is an isolated point, the reachablefactor will be large. If p is closer to the geometric center of its spatiotemporal reachable neighborhood, then the reachablefactor will be small. The adoption of reachablefactor can effectively solve the problem of mistaking isolated points as core points.
In order to solve the fixed time window problem, we propose to use an ORTWD algorithm to calculate the reachable time window for each spatiotemporal point in the data set. The ORTWD algorithm reviews the temporal distribution of all spatiotemporal points to find the reachable time window for each possible cluster. Employing a varied time window for each time cluster can solve the clustering problem faced by data sets with different temporal densities. To specify the ORTWD algorithm, we propose the following definitions.
Definition 3.3:
Time neighborhood.
The time neighborhood of time t is the neighborhood consisting of time neighbors of time t according to a predefined time window ΔT, denoted by NΔT (t).
Definition 3.4:
Core time window.
Let t be a specific time in the time domain of a data set D, let NΔT
(t) be the time neighborhood of t, and let MinPts-time-window(t) be the time window from t to its MinPtsth neighbor. The core time window of time t is defined as follows:
If the number of points in NΔT (t) is greater than MinPts, the core time window of t is set equal to the time window from t to its MinPtsth neighbor. Otherwise, the core time window is undefined.
Definition 3.5:
Reachable time window.
Let t1 and t2 be times of points p1 and p2, respectively in a data set D, and let NΔT
(t2) be the time neighborhood of t2. Then, the reachable time window of t1 with respect to t2 is defined as follows:
If the number of points in t2’s time neighborhood with respect to ΔT is greater than MinPts, the reachable time window of t1 with respect to t2 is the maximum value between core time window (t2) and time window (t1, t2). Here, time window (t1, t2) is the time span of t1 and t2. In this case, the reachable time window is no smaller than the core time windows, which guarantees that t1 is not time reachable with a time window that is smaller than the reachable time window.
Thus, we proposed the ORTWD algorithm to recursively get the point having the smallest time window with the current point in OrderedReachableTimeWindow to construct the distribution of ordered reachable time window. Based on that, we can set a proper time window ΔT′ for each point to solve the fixed time window problem.
Algorithm 1 illustrates the main loop of the ORTWD algorithm. It includes two functions: function 1 – OrderedReachableTimeWindow and function 2 – OrderedTimeList. The algorithm first finds time neighbors for each point in data set D. Then the algorithm starts with a point pi in D. If pi is not processed, it is updated into OrderedReachableTimeWindow, which is used to record distribution of reachable time windows of the points in the data set and set each point a proper time window. Then, we check the core time window of pi. If it is undefined, pi is updated into OrderedTimeList. Here, OrderedTimeList is a list that sorts the reachable time windows of points whose number of NΔT (t) is greater than MinPts in an ascending order. OrderedTimeList is used to determine each point’s smallest reachable time window. In each step of the WHILE loop, point p in OrderedTimeList is selected to update OrderedReachableTimeWindow, in which the ORTWD algorithm stores the distribution of reachable time windows. If the core time window of p is defined, p is used to update OrderedTimeList. The WHILE loop will not end until OrderedTimeList is empty.
The pseudo-code for the procedure of updating ordered reachable time windows is shown in function 1. The parameters for updating OrderedReachableTimeWindow are p, ΔT and MinPts. This function first marks the current point p as a processed point. Then, the reachable time window of p is set to UNDEFINED. Next, the core time window of p is calculated according to time neighborhood of p and MinPts. Finally, p is added to the distribution of ordered reachable time windows OrderedReachableTimeWindow.
The main loop of OrderedTimeList::update is shown in function 2. This function, whose parameter is the spatiotemporal point p, is used to update OrderedTimeList to determine the smallest reachable time window for each point. For each point pj in the time neighborhood of p, if pj is not processed, we will calculate a reachable time window of pj from p (new_reachableTimeWindow). If the reachable time window of pj is not defined, we will set the reachable time window of pj as new_reachableTimeWindow and insert pj into OrderedTimeList in an ascending order. If the reachable time window of pj has been defined, we will compare pj.reachableTimeWindow and new_reachableTimeWindow and choose a smaller one as pj’s reachable time window. After that we will modify the position of pj in OrderedTimeList accordingly.
The ORTWD algorithm can sort the reachable time windows of spatiotemporal points in the data set such that the distribution of reachable time windows can help determine the time partition of data set. We can set proper time windows for corresponding possible clusters according to the distribution of ordered reachable time windows. (a) shows the temporal distribution of original points and (b,c) shows the ORTWD for the data set shown in with different MinPts and ΔT (the value of UNDEFINED is set to be greater than ΔT). The distribution of ordered reachable time windows changes slightly when MinPts and ΔT vary, but the number of troughs is almost the same; these troughs represent potential clusters in the temporal domain. Generally, increasing ΔT sufficiently yields a better result. In , four troughs correspond to four potential temporal clusters, which can be observed from the temporal distribution of origin points ((a)) as well. Three of the troughs have smaller values of reachable time windows, representing three tight clusters – C1, C2 and C3. The reachable time window of the fourth trough is larger, representing a loose cluster, C4. To distinguish these clusters, the time windows should be set smaller than the peak that splits two clusters and higher than the trough that is in the cluster. To distinguish C1 and C2, the time window should be smaller than 10 (the first peak). To classify C4, we can set a time window between 17 and 20. Thus, the ORTWD algorithm can effectively classify clusters with different temporal densities by setting a proper time window ΔT′ for each point according to the ORTWD.
Figure 5. ORTWD with respect to : (a) temporal distribution of original points; (b) MinPts = 10, ΔT = 10 and (c) MinPts = 20, ΔT = 20.
3.2. The DBSTC algorithm
3.2.1. Description of the algorithm
The DBSTC algorithm requires five predefined parameters: k, kt, MinPts, ΔT and Rate. The meanings of the parameters are illustrated in . The parameters ΔT and MinPts are used to determine the distribution of the data set of the ordered reachable time window by assigning each temporal cluster a proper ΔT′. The parameters k and ΔT′ are used to determine the radius and height of the spatiotemporal cylinder, which defines the spatiotemporal neighborhood. The parameter kt is used to determine whether two points are spatiotemporal directly reachable. The parameter MinPts is the threshold used to identify core points. The parameter Rate is defined as the threshold of Reachablefactor. If the Reachablefactor of a core point is greater than Rate, the core point is far away from the geometric center of its spatiotemporal reachable neighborhood. Thus, this point can be regarded as a noise.
Table 1. Predefined parameters of the DBSTC algorithm.
The pseudo-code of algorithm DBSTC is shown in Algorithm 2; it begins by using the ORTWD algorithm to determine the reachable time window distribution of the data set D and set proper time windows for all possible clusters. Then, the algorithm finds each point p and retrieves k-NNs of p within its reachable time window ΔT′. After finding k-NNs for all points, the algorithm re-iterates over each point pi in the data set and then iterates each point pj in pi’s k-NNs to determine the number of shared NNs between pi and pj. If the number is greater than kt, then pj will be added into the spatiotemporal directly reachable neighborhood of pi (denoted by pi.STDRN). If the number of points in pi.STDRN is greater than MinPts, reachablefactor will be calculated to identify whether pi is a core point or noise.
After the core points have been determined, the algorithm begins with the first core point to recursively find all reachable points and then groups them into one cluster until no unclassified core points remain in the data set.
In ORTWD algorithm, the time of OrderedTimeList.update depends on ΔT. The worst time complexity is O(N). In a similar way, the time complexity of GetTimeNeighborhood is also O(N). The time complexity of OrderedReachableTimeWindow.update is O(1). In the WHILE loop, the max size of OrderedTimeList is N. In the FOR loop, the size of data set is N. So the total time complexity of ORTWD is . In DBSTC algorithm, the call of ORTWD costs N2 time. The time complexity of GetKNN is O(N). Thus, the time complexity of the procedure of calculating core points in the FOR loop is O(N × (N + K)). The time complexity of finding clusters in the WHILE loop is O(N × K). Because k is a constant, the total time complexity of DBSTC algorithm is
. As for STSNN and ST-DBSCAN, both of their time complexity are O(N2). Our algorithm has the same time complexity as those of STSNN and ST-DBSCAN.
3.2.2. Determination of input parameters
Five parameters – k, kt, MinPts, ΔT and Rate – are required in the DBSTC algorithm. The STSNN algorithm assumes that kt and MinPts can be defined as percentages of k and a heuristic method can be used to determine the relationship between them. Smaller kt and MinPts make more core points, which lead to a larger number of points in each cluster but smaller number of clusters. On the contrary, larger kt and MinPts make a smaller number of points in each cluster but larger number of clusters. STSNN suggests that k can be set to 16–24, but a somewhat smaller value of k will be suitable for small data sets to discover clusters with a small range. Parameters kt and MinPts can be set to a value of approximately 0.5k. However, taking k as a constant seems to be inappropriate for data sets with different numbers of spatiotemporal points. Here, we use the concept of the lifetime of the number of clusters proposed by Pei et al. (Citation2006), which is defined as the period a given number of clusters exists over k. Whereas the lifetime of cluster number has its corresponding range of k values, a reasonable range of k should be yielded by the longest lifetime of respective cluster number. Thus, the concept of lifetime defined by Pei et al. (Citation2006) is used to determine k in our algorithm. The parameters kt and MinPts are both set to 0.5k according to STSNN’s heuristic method. ΔT is the initial time window that is used only to determine the distribution of reachable time windows. Provided that the value is not too small, the ordered reachable time windows distribution of a data set will be sufficient to assign each point a proper time window. In the ORTWD algorithm, a slightly larger value of ΔT can make the distribution more even thus will be helpful to choose time windows for the points in the data set. Rate is a threshold on reachablefactor used to distinguish noises from core points. If rate is too large, the isolated points will not be identified from core points. If rate is too small, identified core points might be classified as noise. To distinguish noises from clusters, Rate can be set in the range of 1.5–2 according to heuristic.
3.2.3. Evaluation of clustering results
In order to show accuracy of the proposed algorithm, Compactness, Separation and Davies–Bouldin Index are used to evaluate the clustering results.
Compactness (CP) is the mean distance between each point and its corresponding cluster center. The formula of CP is defined as follows:where K is the number of clusters, wk is the center of kth cluster k and Ck is the kth cluster. Smaller CP means the points in the same clusters are closer, which means better classified results.
Separation (SP) is used to evaluate the mean distance between each cluster center, which is defined as follows:
Larger SP means the distances between cluster centers are farther, which means better classified results.
Davies–Bouldin Index (DBI) is the maximum value of sum of arbitrary CPi and CPj dividing the distance between their cluster centers. The DBI is defined as follows:
DBI combines CP and SP together. Smaller DBI means shorter intra-cluster distances and larger inter-cluster distances, which also mean better classified results.
4. Results and discussion
4.1. Experiments on simulated data sets
Three simulated spatiotemporal data sets containing clusters with different spatiotemporal densities were used to test the proposed algorithm. For comparison, the STSNN and ST-DBSCAN were also implemented. In our experiments, kt and MinPts were both set to 0.5 k (Liu, Deng, et al. Citation2014). The parameter Rate used to evaluate the level of reachablefactor was set to 1.5. As the parameters for ST-DBSCAN, MinPts was set to ln N (Birant and Kut Citation2007).
The first data set D1 contains clusters with different spatiotemporal densities, as specified in Section 2.2.3. The original data set of D1 is shown in . The result of the ORTWD algorithm is shown in . Based on the distribution, the time windows of the 1–225th points of the ORTWD algorithm’s result were set to 10, and the time windows of 226–319th points were set to 20. Based on the lifetime of the cluster number (), k could be set between 14 and 53. The clustering result of D1 using DBSTC is shown in . From the result, it can be seen that DBSTC performed well. For the STSNN algorithm, when using ΔT = 10 ((a)), STSNN correctly distinguished C1, C2 and C3 but wrongly classified C4 as two clusters and a set of noise points. When using ΔT = 20 ((b)), STSNN merged C1 and C2 into one cluster and classified the noise points O1 and O2 into C3. The same misclassification happened with ST-DBSCAN. Besides, ST-DBSCAN performed worse than STSNN in identifying loose clusters when it identified dense clusters well due to fixed Eps-distance. shows the evaluation results of different clustering algorithms using different indices for D1. The smallest DBI and the largest SP indicate the best performance of our algorithm. As for CP, the ST-DBSCAN responding (a) only has successfully classified three dense clusters while it cannot detect the loosen one (C4). It gets the smallest CP because it only has three clusters with a high density. Our algorithm gets the second smallest CP, which means good classified results.
Figure 6. Clustering result of D1 obtained using DBSTC with k = 20.
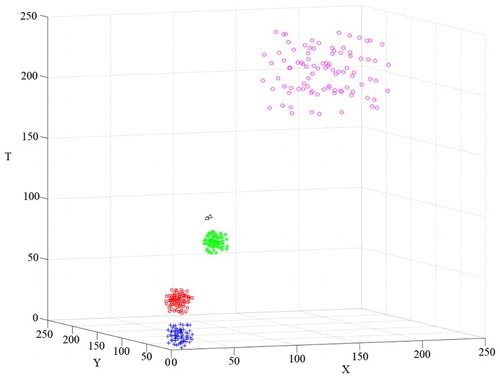
Figure 7. Clustering result of D1 obtained using STSNN: (a) clustering result with k = 20 and ΔT = 10 and (b) clustering result with k = 20 and ΔT = 20.
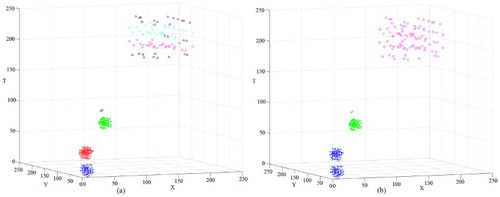
Figure 8. Clustering result of D1 obtained using ST-DBSCAN: (a) clustering result with Eps = 10 and ΔT = 10 and (b) clustering result with Eps = 20 and ΔT = 20.
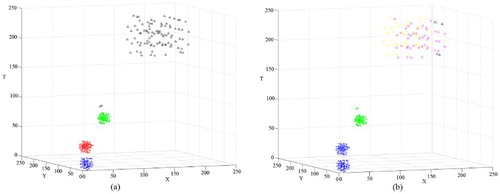
Table 2. Number of clusters of D1 for different k values.
Table 3. Evaluation results of different clustering algorithms using different indices for D1.
The second data set has three clusters, C1, C2 and C3 (). shows two clusters in the temporal domain. To distinguish them, the reachable time windows could both be set to 3. Based on the lifetime of the cluster number (), k could be set between 15 and 40. The clustering result of DBSTC is shown in for k = 16 and k = 20. For the STSNN algorithm, we also set k = 16 and k = 20, and in both cases, we used ΔT = 3. The two algorithms both correctly distinguished clusters C1, C2 and C3. Compared with DBSTC, STSNN classified more noises into clusters. In addition, STSNN classified the data set into 8 clusters (k = 16) and 11 clusters (k = 20) because of taking isolated noises as core points, whereas DBSTC classified D2 into 3 clusters when k was appropriate. Thus, the reachablefactor that we proposed can effectively solve the problem of misjudgment of core points that occurred when STSNN was used. As for ST-DBSCAN, it classified D2 into three clusters when D2 had clusters with similar dense densities with proper parameters. However, as we can see from (a), C3 is not an ellipsoid of uniform density, the density of out range is less than inside. Thus, ST-DBSCAN did not identified part of points in out range as C3. In order to classify those points, we need to increase ΔT, which would merge C2 and C3 together as shown in (b). shows the evaluation results of different clustering algorithms using different indices for D2. The smallest CP, DBI and the largest SP indicate that our algorithm has the best performance.
Figure 9. Original data set D2 with 2696 points.
Figure 10. The ORTWD of D2 for ΔT = 3 and MinPts = 20.
Figure 11. Clustering result of D2 obtained using DBSTC: (a) clustering result for k = 16 and (b) clustering result for k = 20.
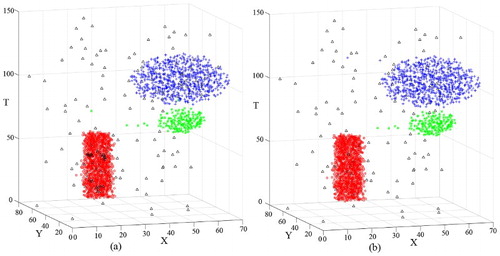
Figure 12. Clustering result of D2 obtained using STSNN: (a) clustering result for k = 16 and ΔT = 3 and (b) clustering result for k = 20 and ΔT = 3.
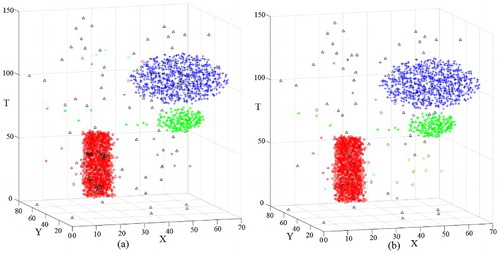
Figure 13. Clustering result of D2 obtained using ST-DBSCAN: (a) clustering result for Eps = 10 and ΔT = 3.9 and (b) clustering result for Eps = 10 and ΔT = 5.
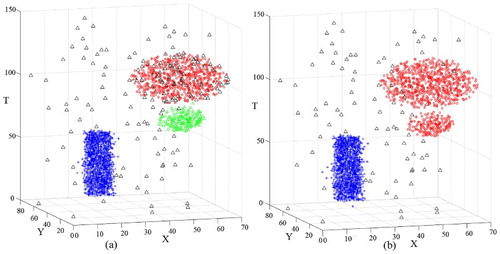
Figure 14. Original data set D3.
Table 4. Number of clusters of D2 for different k values.
Table 5. Evaluation results of different clustering algorithms using different indices for D2.
The third data set D3 contains four clusters with different sizes, shapes and densities (). As observed in (a), we set the time windows of the 1–2925th points of the ORTWD algorithm’s result to 0.9, the time windows of the 2926–3936th points to 0.5 and the time windows of the 3937–4150th points to 0.5. Based on the lifetime of the cluster number (), k could be set between 20 and 32. The clustering result of D3 obtained using DBSTC is shown in (b). From the result, it can be seen that DBSTC performed well. Correspondingly, STSNN separated C4 when ΔT = 1, whereas it merged C2 and C3 together when ΔT = 2. ST-DBSCAN had the same problem. The only different is ST-DBSCAN separated C4 into three clusters and lots of noise points while STSNN separated C4 into two clusters. Therefore, the performance of DBSTC was not influenced by varied spatiotemporal densities, sizes, shapes and noise of data sets. shows the valuation results of different clustering algorithms using different indices for D3. The smallest DBI and the largest SP indicate the best performance of our algorithm. As for CP, the same situation as for D1 happens again. The ST-DBSCAN responding (a) cannot detect the loosen cluster C4. It gets the smallest CP because it only has three clusters with a high density. Our algorithm gets the second smallest CP, which indicates good clustering results.
Figure 15. Clustering result of D3 obtained using DBSTC: (a) the ORTWD of D3 with ΔT = 4 and MinPts = 50 and (b) clustering result obtained using DBSTC with k = 20.
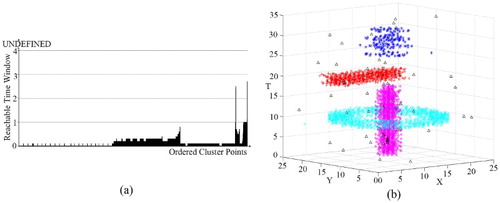
Figure 16. Clustering result of D3 obtained using STSNN: (a) clustering result with k = 20 and ΔT = 1 and (b) clustering result with k = 20 and ΔT = 2.
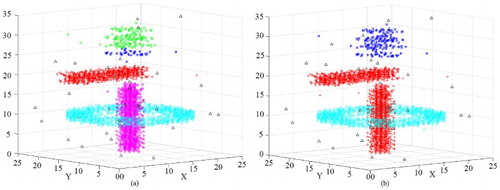
Figure 17. Clustering result of D3 obtained using ST-DBSCAN: (a) clustering result with Eps = 1 and ΔT = 0.9 and (b) clustering result with Eps = 1 and ΔT = 2.
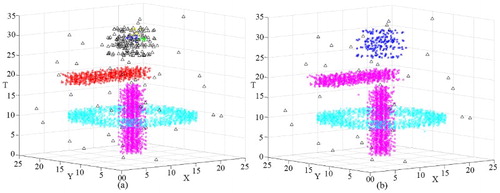
Table 6. Number of clusters in D3 for different k values.
Table 7. Evaluation results of different clustering algorithms using different indices for D3.
4.2. Real world applications to seismic data sets
Seismicity is a complex dynamic spatiotemporal process with variations in space, time and size over very broad ranges of scales (Zaliapin and Ben-Zion Citation2013). In this experiment, two seismic data sets were used to test the performance of the DBSTC algorithm for finding clustered earthquakes. Clustered earthquakes are usually perceived as foreshocks (earthquakes that occur before strong ones) or aftershocks (earthquakes that occur after strong ones) of strong earthquakes (Pei et al. Citation2010), which may help predict strong earthquakes or/and understand their underlying mechanisms (Ripepe, Piccinini, and Chiaraluce Citation2000).
The study area is around southwestern china (bounds 72–106°E, 20–40°N). This region includes the location of the devastating Wenchuan earthquake (M = 8.2). The data sets were downloaded from the China Earthquake Data Center (http://data.earthquake.cn/data/).
Seismic data set SD1 has 294 points of earthquakes from 1 May 1975 to 31 May 1976 with magnitudes of greater than 3. The origin data set are shown in . Clustering results obtained using DBSTC, STSNN and ST-DBSCAN are shown in , respectively. Based on the ORTWD ((a)), the time windows of the 1–54th points were set to 0.5, the time windows of the 55–138th points were set to 0.4, and the time windows of the 139–294th points were set to 0.3. The DBSTC algorithm detected three clusters, which were labeled as C1, C2 and C3. As shown in , C1, C2 and C3 represent three clustered strong earthquakes: the Menglian earthquake (which occurred on 12 July 1995 at 21.96°N, 99.16°E, M = 7.3; C1), the Wuding earthquake (which occurred on 24 October 1995 at 26.02°N, 102.24°E, M = 6.6; C2) and the Lijiang earthquake (which occurred on 3 February 1996 at 27.34°N, 100.25°E, M = 6.9; C3). There are 18 points in C1, and 8 of them were identified as foreshocks of the Menglian earthquake. As for the Wuding earthquake and the Lijiang earthquake, 42 and 85 aftershocks were identified, respectively. This results match well with the seismic records (Chen Citation2002). As for STSNN, when we chose a smaller ΔT = 0.32, STSNN did identify clusters C2 and C3 while failed to detect C1 which has a loose temporal density. However, while we chose a larger ΔT = 0.64, STSNN detected C3 while other noise points were identified into clusters and some isolated points were classified as single clusters.ST-DBSCAN could identified three clusters with Eps = 0.2 and ΔT = 1.3, while each cluster is much larger than cluster detected by DBSTC and included some noise points. In order to make each cluster smaller, we decreased ΔT, which did work while C2 are separated into two clusters.
Figure 18. Seismic data set SD1: (a) original data set and (b) vertical perspective of the data set.
Figure 19. Clustering result of the seismic data set SD1 obtained using DBSTC: (a) the ORTWD with ΔT = 1 and MinPts = 20 and (b) clustering result using DBSTC with k = 20.
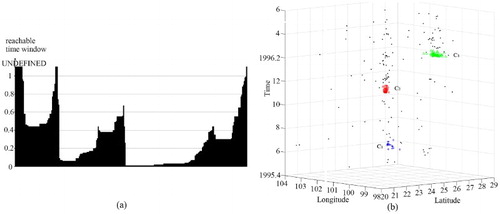
Figure 20. Clustering result of SD1 obtained using STSNN: (a) clustering result with k = 20 and ΔT = 0.32 and (b) clustering result with k = 20 and ΔT = 0.64.
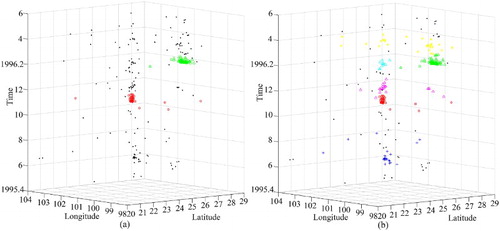
Figure 21. Clustering result of SD1 obtained using ST-DBSCAN: (a) clustering result with Eps = 0.5 and ΔT = 0.5 and (b) clustering result with Eps = 0.2 and ΔT = 1.3.
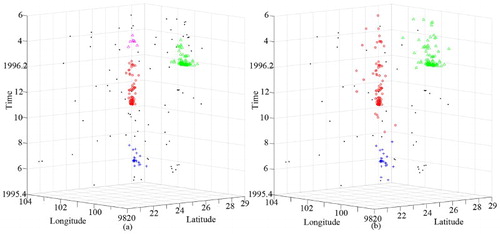
Table 8. Statistical information of the clustering result of the seismic data set SD1.
Seismic data set SD2 has 1131 points of earthquakes from 21 January 2008 to 23 February 2010 with magnitudes greater than 4 in an area located between 72° and 106°E and 30° and 40°N. shows the original data set, and show the clustered results obtained using DBSTC, STSNN and ST-DBSCAN, respectively. The time windows of the 1–1016th points were set to 1, the time windows of the 1017–1054th points were set to 2, and the time windows of the 1054–1131th points were set to 1.5 based on the ORTWD ((a)). The proposed DBSTC algorithm detected seven clusters, labeled as C1–C7. Cluster C2 occurred after the Wenchuan earthquake (on 12 May 2008 at 31.01°N, 103.42°E, M = 8.2), and 734 earthquakes were identified as aftershocks of the Wenchuan earthquake. The 56 earthquakes identified as C3 contain 3 foreshocks and 53 aftershocks of the Wuqia earthquake (which occurred on 5 October 2008). One earthquake of C4 was identified as a foreshock of the Zhongba earthquake (which occurred on 24 October 1995 at 30.92°N, 80.57°E, M = 6.9), and the rest were identified as aftershocks. There are 38 earthquakes in C5, and 4 of them were identified as foreshocks of the Tanggula earthquake (which occurred on 10 June 2008 at 33.10°N, 92.07°E, M = 5.5). C6 was identified as aftershocks of the Yutian earthquake (which occurred on 20 March 2008). Two strong earthquakes in Dachaidan on 10 November 2008 and 28 August 2009 were identified as Dachaidana and Dachaidanb, respectively. C1 and C7 were used to identify the aftershocks of these two strong earthquakes. Statistical information of the clustered earthquakes is listed in . According to the seismic records (Li, Liu, and Yu Citation2009; Li et al. Citation2010; Ji et al. Citation2011), there are seven strong earth quakes occurred during this period thus our clustering results are reasonable. As for STSNN, there are 17 clustered earthquakes with ΔT = 1.7 and 14 clustered earthquakes with ΔT = 2.56. STSNN makes a lot of isolated point into core point and identified some small clusters no matter which ΔT we choose. When we chose a smaller ΔT, STSNN identified more noise points as clusters and cut the clustered earthquakes of Wenchuan into three clusters. If we chose a larger ΔT, STSNN made each cluster much more larger than DBSTC while it still classified clustered earthquakes of Wenchuan into two parts. This is caused by fixed time windows in varied temporal densities while our algorithm can solve it. ST-DBSCAN does not have the isolated core point problem compared with STSNN. When Eps = 5 and ΔT = 2, ST-DBSCAN identified seven clusters. Several clusters are bit larger than the result of DBSTC and included some noise points such as C2, C6 and C7. In order to decrease the number of points in clusters, we decreased ΔT = 2, which excluded some noise points while C2 were separated into two clusters.
Figure 22. Seismic data set SD2: (a) original data set and (b) vertical perspective of data set.
Figure 23. Clustering result of the seismic data set SD2 obtained using DBSTC: (a) ORTWD with ΔT = 3 and MinPts = 30 and (b) clustering result obtained using DBSTC with k = 20.
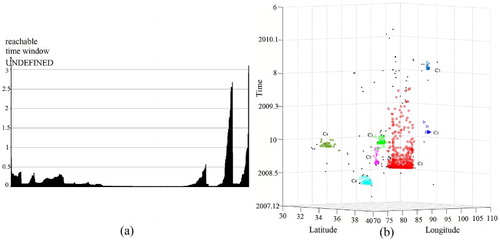
Figure 24. Clustering result of SD2 obtained using STSNN: (a) clustering result with k = 20 and ΔT = 1.7 and (b) clustering result with k = 20 and ΔT = 2.56.
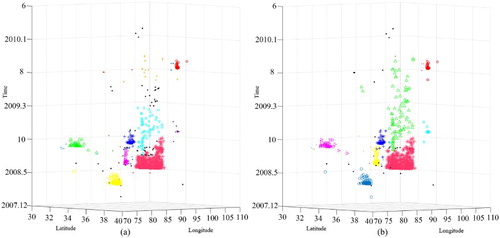
Figure 25. Clustering result of SD2 obtained using ST-DBSCAN: (a) clustering result with Eps = 5 and ΔT = 1 and (b) clustering result with Eps = 5 and ΔT = 2.
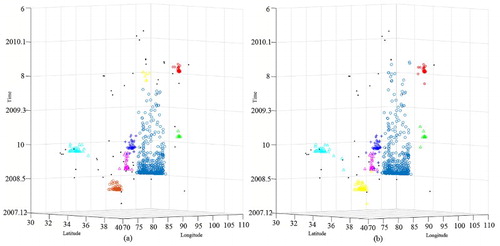
Table 9. Summary of clustering results with seismic data set SD2.
5. Conclusions and future works
Most density-based clustering methods cannot be applied to data sets that contain clusters with different densities in both the spatial and temporal domains. In this article, we proposed the DBSTC algorithm to solve the clustering problem for such data sets. We proposed the notion of reachablefactor to solve the clustering problem for data sets with different spatial densities and the ORTWD algorithm to solve the clustering problem for data sets with varied densities in the temporal domain. To demonstrate the efficiency of our algorithm, several simulated data sets were used to compare our algorithm with STSNN and ST-DBSCAN. The comparison results show that the DBSTC algorithm was able to discover spatiotemporal clusters with different densities, whereas STSNN and ST-DBSCAN failed. In addition, our algorithm was also effectively applied to classify data sets containing clusters with different sizes and shapes in the presence of noises. Finally, the DBSTC algorithm was successfully applied to identify foreshocks and aftershocks in southwestern China using the real world seismic data sets. Such real world applications may help researchers understand the mechanisms underlying the earthquakes.
This algorithm may encounter computation bottlenecks with tremendous data sets by using use k-NN search, which requires high computational efforts. Future work will focus on further testing the performance of this algorithm. With increase of the amount of available spatiotemporal data, an indexed mechanism or a paralleled method may be needed to improve the efficiency of DBSTC. In addition, the DBSTC algorithm may be applied to some geographic information data sets, such as criminal data sets and disease data sets (Musenge et al. Citation2013) to help understand the spatiotemporal mechanisms underlying these phenomena.
Acknowledgements
We thank the CyberGIS Center in University of Illinois at Urbana-Champaign for great help and the great suggestions of the reviewers.
Disclosure statement
No potential conflict of interest was reported by the authors.
ORCID
Zhenhong Du http://orcid.org/0000-0001-9449-0415
Yuhua Gu http://orcid.org/0000-0002-8707-8200
Feng Zhang http://orcid.org/0000-0003-1475-8480
Renyi Liu http://orcid.org/0000-0003-4001-4266
Additional information
Funding
References
- Ana, L. N. F., and Anil K Jain. 2003. “Robust Data Clustering.” Paper presented at the Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, 2003.
- Ankerst, Mihael, Markus M. Breunig, Hans-Peter Kriegel, and Jörg Sander. 1999. “OPTICS: Ordering Points to Identify the Clustering Structure.” Paper presented at the ACM Sigmod Record.
- Biçici, Ergun, and Deniz Yuret. 2007. “Locally Scaled Density Based Clustering.” Paper presented at the International Conference on Adaptive and Natural Computing Algorithms.
- Birant, Derya, and Alp Kut. 2007. “ST-DBSCAN: An Algorithm for Clustering Spatial-Temporal Data.” Data & Knowledge Engineering 60 (1): 208–221. doi: 10.1016/j.datak.2006.01.013
- Byers, Simon, and Adrian E. Raftery. 1998. “Nearest-Neighbor Clutter Removal for Estimating Features in Spatial Point Processes.” Journal of the American Statistical Association 93 (442): 577–584. doi: 10.1080/01621459.1998.10473711
- Campello, Ricardo J. G. B., Davoud Moulavi, and Jörg Sander. 2013. “Density-Based Clustering Based on Hierarchical Density Estimates.” Paper presented at the Pacific-Asia Conference on Knowledge Discovery and Data Mining.
- Chen, Qifu. 2002. Earthquake Cases in China (1995–1996). Beijing: Seismological Press (in Chinese).
- Craglia, Max, Kees de Bie, Davina Jackson, Martino Pesaresi, Gábor Remetey-Fülöpp, Changlin Wang, Alessandro Annoni, et al. 2012. “Digital Earth 2020: Towards the Vision for the Next Decade.” International Journal of Digital Earth 5 (1): 4–21. doi: 10.1080/17538947.2011.638500
- Du, Zhenhong, Yuhua Gu, Chuanrong Zhang, Feng Zhang, Renyi Liu, Jean Sequeira, and Weidong Li. 2017. “ParSymG: A Parallel Clustering Approach for Unsupervised Classification of Remotely Sensed Imagery.” International Journal of Digital Earth 10: 471–489. doi: 10.1080/17538947.2016.1229818
- Elnekave, Sigal, Mark Last, and Oded Maimon. 2007. “Incremental Clustering of Mobile Objects.” Paper presented at the IEEE 23rd International Conference on Data Engineering Workshop, Istanbul, Turkey, April 15, 16, 20.
- Ertoz, Levent, Michael Steinbach, and Vipin Kumar. 2002. “A New Shared Nearest Neighbor Clustering Algorithm and Its Applications.” Paper presented at the Workshop on Clustering High Dimensional Data and its Applications at 2nd SIAM International Conference on Data Mining, Arlington, VA, April 13.
- Ester, Martin, Hans-Peter Kriegel, Jörg Sander, and Xiaowei Xu. 1996. “A Density-Based Algorithm for Discovering Clusters in Large Spatial Databases with Noise.” Paper presented at the KDD.
- Fan, Yida, Qi Wen, and Shirong Chen. 2012. “Engineering Survey of the Environment and Disaster Monitoring and Forecasting Small Satellite Constellation.” International Journal of Digital Earth 5 (3): 217–227. doi: 10.1080/17538947.2011.648540
- Goodchild, Michael F. 2007. “Citizens as Sensors: The World of Volunteered Geography.” GeoJournal 69 (4): 211–221. doi: 10.1007/s10708-007-9111-y
- Goodchild, Michael F., Huadong Guo, Alessandro Annoni, Ling Bian, Kees de Bie, Frederick Campbell, Max Craglia, et al. 2012. “Next-generation Digital Earth.” Proceedings of the National Academy of Sciences USA 109 (28): 11088–11094. doi: 10.1073/pnas.1202383109
- Guo, Huadong. 2012. “Digital Earth: A New Challenge and New Vision.” International Journal of Digital Earth 5 (5): 1–3. doi: 10.1080/17538947.2012.646005
- Ji, Ping, Gang Li, Jie Liu, and Sidao Ni. 2011. “A Review of Seismicity in 2010.” Earthquake Research in China. 25 (1): 111–119.
- Karami, Amin, and Ronnie Johansson. 2014. “Choosing DBSCAN Parameters Automatically Using Differential Evolution.” International Journal of Computer Applications 91 (7). doi: 10.5120/15890-5059
- Kriegel, Hans-Peter, Peer Kröger, Jörg Sander, and Arthur Zimek. 2011. “Density-based Clustering.” Wiley Interdisciplinary Reviews: Data Mining and Knowledge Discovery 1 (3): 231–240.
- Li, Gang, Jie Liu, Ping Ji, and Tieshuan Guo. 2010. “A Review of Seismicity in 2009.” Earthquake Research in China 24 (1): 137–146.
- Li Gang, Jie Liu, and Surong Yu. 2009. “A Review of Seismicity in 2008.” Earthquake Research in China 23 (1): 105–118.
- Liu, Qiliang, Min Deng, Jiantao Bi, and Wentao Yang. 2014. “A Novel Method for Discovering Spatio-temporal Clusters of Different Sizes, Shapes, and Densities in the Presence of Noise.” International Journal of Digital Earth 7 (2): 138–157. doi: 10.1080/17538947.2012.655256
- Liu, Shuo, Xiangtao Fan, Qingke Wen, Wei Liang, and Yuanfeng Wu. 2014. “Simulated Impacts of 3D Urban Morphology on Urban Transportation in Megacities: Case Study in Beijing.” International Journal of Digital Earth 7 (6): 470–491. doi: 10.1080/17538947.2012.740079
- Matsuda, Yoshitatsu, Kazunori Yamaguchi, and Ken-Ichiro Nishioka. 2015. “Discovery of Regular and Irregular Spatio-temporal Patterns from Location-Based SNS by Diffusion-type Estimation.” IEICE TRANSACTIONS on Information and Systems E98.D (9): 1675–1682. doi: 10.1587/transinf.2015EDP7095
- McArdle, Gavin, Ali Tahir, and Michela Bertolotto. 2015. “Interpreting Map Usage Patterns Using Geovisual Analytics and Spatio-temporal Clustering.” International Journal of Digital Earth 8 (8): 599–622. doi: 10.1080/17538947.2014.898704
- Miller, Harvey J., and Jiawei Han. 2009. Geographic Data Mining and Knowledge Discovery. Boca Raton: CRC Press.
- Musenge, Eustasius, Tobias Freeman Chirwa, Kathleen Kahn, and Penelope Vounatsou. 2013. “Bayesian Analysis of Zero Inflated Spatiotemporal HIV/TB Child Mortality Data Through the INLA and SPDE Approaches: Applied to Data Observed Between 1992 and 2010 in Rural North East South Africa.” International Journal of Applied Earth Observation and Geoinformation 22: 86–98. doi: 10.1016/j.jag.2012.04.001
- Northrop, Paul. 1998. “A Clustered Spatial-Temporal Model of Rainfall.” Proceedings of the Royal Society A: Mathematical, Physical and Engineering Sciences 454 (1975): 1875–1888. doi: 10.1098/rspa.1998.0238
- Pei, Tao, Chenghu Zhou, A-Xing Zhu, Baolin Li, and Chengzhi Qin. 2010. “Windowed Nearest Neighbour Method for Mining Spatio-temporal Clusters in the Presence of Noise.” International Journal of Geographical Information Science 24 (6): 925–948. doi: 10.1080/13658810903246155
- Pei, Tao, A-Xing Zhu, Chenghu Zhou, Baolin Li, and Chengzhi Qin. 2006. “A New Approach to the Nearest-Neighbour Method to Discover Cluster Features in Overlaid Spatial Point Processes.” International Journal of Geographical Information Science 20 (2): 153–168. doi: 10.1080/13658810500399654
- Ripepe, M., D. Piccinini, and L. Chiaraluce. 2000. “Foreshock Sequence of September 26th, 1997 Umbria-Marche Earthquakes.” Journal of Seismology 4 (4): 387–399. doi: 10.1023/A:1026508425230
- Vahidnia, Mohammad H., Ali A. Alesheikh, Saeed Behzadi, and Sara Salehi. 2013. “Modeling the Spread of Spatio-temporal Phenomena Through the Incorporation of ANFIS and Genetically Controlled Cellular Automata: A Case Study on Forest Fire.” International Journal of Digital Earth 6 (1): 51–75. doi: 10.1080/17538947.2011.603366
- Wang, Qinjun, Huadong Guo, Yu Chen, Qizhong Lin, and Hui Li. 2011. “Application of Remote Sensing for Investigating Mining Geological Hazards.” International Journal of Digital Earth 6 (5): 1–20.
- Wang, Min, Aiping Wang, and Anbo Li. 2006. “Mining Spatial-Temporal Clusters from Geo-databases.” In Advanced Data Mining and Applications, Xi’an, China, August 14–16, 2006, edited by Xue Li, Osmar R. Zaiane, and Zhanhuai Li, 263–270. Berlin: Springer Berlin Heidelberg.
- Woudsma, Clarence, John F. Jensen, Pavlos Kanaroglou, and Hanna Maoh. 2008. “Logistics Land Use and the City: A Spatial-temporal Modeling Approach.” Transportation Research Part E: Logistics and Transportation Review 44 (2): 277–297. doi: 10.1016/j.tre.2007.07.006
- Xue, Cunjin, Wanjiao Song, Lijuan Qin, Qing Dong, and Xiaoyang Wen. 2015. “A Spatiotemporal Mining Framework for Abnormal Association Patterns in Marine Environments with a Time Series of Remote Sensing Images.” International Journal of Applied Earth Observation and Geoinformation 38: 105–114. doi: 10.1016/j.jag.2014.12.009
- Yusof, Norhakim, and Raul Zuritamilla. 2017. “Mapping Frequent Spatio-temporal Wind Profile Patterns Using Multi-Dimensional Sequential Pattern Mining.” International Journal of Digital Earth 10: 238–256. doi: 10.1080/17538947.2016.1217943
- Zaliapin, I., and Y. Ben-Zion. 2013. “Earthquake Clusters in Southern California II: Classification and Relation to Physical Properties of the Crust.” Journal of Geophysical Research: Solid Earth 118 (6): 2865–2877. doi:10.1002/jgrb.50178.
- Zaliapin, Ilya, Andrei Gabrielov, Vladimir Keilis-Borok, and Henry Wong. 2008. “Clustering Analysis of Seismicity and Aftershock Identification.” Physical Review Letters 101 (1): 018501. doi: 10.1103/PhysRevLett.101.018501