
 ?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.
?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.Abstract
In odour source localization, the probabilistic inference method effectively manages to find odour plumes, both at the start and during the middle of the search. However, the reactive method is more adept at tracking the odour plumes. Combining two search methods could yield a comprehensive algorithm for odour source detection, particularly effective in obstructed environments where the concurrent tasks of finding and tracking the source are performed interchangeably. In this study, we aim to achieve a balance between the exploration of the probabilistic method and the exploitation of the reactive method by alternating between the two. A switching coefficient is calculated based on burstiness, which measures the periodic characteristics of gas detection. This coefficient determines whether the search agent is within the primary plume flow or outside of it. Based on the determination, the agent decides its next course of action using the probabilistic inference method or the reactive method. We verify and evaluate the proposed method with an autonomous mobile robot in an obstructed indoor environment. Having achieved nearly 10% in distance travelled reduction and more than a 30% decrease in average search time compared to a previously studied Infotaxis–Dijkstra switching algorithm, we can confidently assert the efficiency of the proposed method.
1. Introduction
The process of locating and tracking the movement of odorant particles (gas) in the air back to their point of origin holds significant potential for numerous practical engineering applications, including the deployment of safety and rescue robots in airports and disaster scenarios. Odor source localization (OSL) with artificial agents like robots is challenging because the human designer, despite discerning over a trillion olfactory stimuli [Citation1], often encounters difficulties in accurately locating odour sources using innate strategies. Numerous search algorithms have been investigated, categorizing OSL algorithms into two primary approaches: the bio-inspired approach and the probabilistic approach. While the bio-inspired approach can compensate for the imperfect olfactory ability of the human designer by extracting source search strategies from species such as silkworm moths, fruit flies, and dogs [Citation2–5], the Probabilistic approach can extend the ability of the searcher by giving it memories, additional sensory information, and future measurements estimation. Most representatives of the Bio-inspired approach are reactive methods such as silkworm moth-inspired surge-zigzag-loop searching strategy [Citation6–8] or E. coli bacterium-inspired run-tumble searching strategy [Citation9,Citation10]. For the probabilistic methods, the Infotaxis algorithm [Citation11,Citation12] stands as a remarkable example along with other approaches of facilitating gas source finding by constructing a gas distribution map [Citation13–15]. Infotaxis has become the most popular algorithm in OSL due to its attempt to balance the exploitation and exploration problems in OSL. Interestingly, balancing exploitation and exploration is also the main problem in reinforcement learning [Citation16]. Therefore, a few studies have tried to solve the OSL task by examining the underlying motivations of natural experts, whose navigation could be formalized as a task with a reward for success [Citation17,Citation18]. However, these approaches require full or partial observation by the agent of the environment, which has led these studies to remain confined to simulations in obstacle-free environments. Other studies such as Loisy et al. [Citation12] attempted to improve the exploration of the Infotaxis algorithm. They integrated a distance metric into entropy calculations, accounting for the robot's proximity to sources. However, in obstructed environments, this increases computational demands, as path planning is needed to find obstacle-free routes from the robot to potential sources at each step. Regarding the attempt to improve the exploitation, Liu et al. [Citation19] link the searcher's step size to potential entropy gain to improve the exploitation, effective in simulations with fine grid resolution. However, real indoor experiments face limitations in changing the robot's step size due to constraints in raw grid resolution and motor control.
The reactive method directs the search agent to immediately execute predefined actions in response to sensory inputs. For instance, upon detecting a gas plume, the agent swiftly moves forward and switches to a zig-zag pattern if it loses track of the plume. However, this method faces challenges in turbulent, obstacle-laden environments. Chaotic airflow can lead to the agent being diverted far from the primary plume flow when intermittently detecting gas plumes from irregular directions. To counter this, having a memory or representing the source location probability enables effective ongoing search. In practice, the reactive method may not initiate movement without an initial gas detection, limiting its practical use in scenarios where ongoing environmental patrols or locating gas sources before their spread is necessary.
In contrast, most of the probabilistic inference methods maintain a probabilistic map of the source location or gas distribution during the whole search process which provides the agent memory and belief of its past and future gas detection respectively. At the beginning, most distributions are initialized as a uniform distribution map, which also generates random explore movements at the start. Hence, the agent can execute effective exploration actions even when it loses track of the odour plume or lacks prior information about it. As the search progresses, the agent continuously updates its beliefs up to a certain extent. This process can assist in mitigating the impact of sporadic irregular gas detections. However, it also hinders the search progress by undervaluing individual gas detections, as the sparse detections are solely used for updating the posterior distribution. This is undesirable in specific scenarios, especially in obstructed environments. A previous study demonstrated that placing a relatively large, simple rectangular-shaped obstacle effectively blocks the majority of gas emissions from reaching the agent on the opposite side [Citation20]. Therefore, even a single gas detection event should be deemed valuable and factored into the search. In contrast to reactive methods that require minimal prior environmental knowledge, most probabilistic methods depend on information about environmental parameters, such as wind speed and gas release rate [Citation11]. Consequently, they are effective only when a model of the environment or plume dispersion is accessible, and some can solely perform offline OSL tasks following data processing. Haratsu et al. [Citation21] introduced a particle filter-based method, using pre-recorded large outdoor wind fluctuations instead of relying solely on computational fluid dynamics for gas dispersion modelling. Although their study lacks obstacles, occasional full reversals in wind direction resemble airflow in obstructed environments. However, their search algorithm tries to neglect events of no gas detection, which mostly occur in obstructed regions, where obstacles block most gas particles from reaching the robot.
We leverage the strengths of the reactive method to compensate for the probabilistic method's limitations and vice versa. This study combines both approaches to maximize advantages and minimize shortcomings. Specifically, we choose the Silkworm moth-inspired algorithm from the reactive methods. For the probabilistic method, we will select the Infotaxis–Dijkstra switching algorithm [Citation20], an integrated version of the Infotaxis algorithm with the Dijkstra algorithm to be used in the obstructed environment. Since the Dijkstra algorithm is a deterministic searching method, technically, our proposed method will be a Reactive-probabilistic-deterministic (RPD) search method. The definition and application of each component in the RPD method are detailed in Section 2. The Infotaxis–Dijkstra switching algorithm has no reactive component; henceforth, we will refer to it as the PD method. The names for both methods reflect a generalization. We can substitute the Dijkstra algorithm with the A-star algorithm or the silkworm moth-inspired algorithm with an algorithm inspired by E. coli bacterium, as long as they exhibit the same essential characteristics. Sunzid Hassan et al. [Citation22] combine planning algorithms to improve OSL in obstructed environments. They operate without probabilistic algorithms and gas location maps. Instead, they employ computer vision, activating searches based on source images. This deterministic approach prompts robust exploitation actions, targeting areas likely to contain the source. However, in our study, we focus on detecting leaked gas sources in situations where human or computer vision confirmation of the source isn't possible. The framework for the integration of the Reactive-probabilistic-deterministic method is established in Section 3. The evaluation is conducted through experiments utilizing an autonomous mobile robot. The setup and results of these experiments are introduced in Section 4. In the end, a conclusion of how the proposed method improves the OSL tasks and future works is placed in Section 5.
2. Materials and methods
2.1. Silkworm moth-inspired reactive method
We select the behaviour of adult male silkworm moths, Bombyx mori, as the foundation for our reactive method. These moths have two antennae on their heads, specifically designed for detecting the female sex pheromone, bombykol [Citation23]. Male silkworm moths display stereotyped behaviours in their pursuit of a female. These behaviours can be categorized into three distinct states: “surge,” “zig-zag,” and “loop” [Citation6]. The “surge” state signifies an exploitative behaviour triggered when the moth encounters a pheromone stimulus, resulting in a straight movement. In contrast, “zig-zag” characterizes exploratory behaviours and consistently follows the “surge” state when the moth loses track of the gas that triggered it just before. After the zig-zag pattern, the silkworm moth eventually transitions into a “loop” pattern. During both the loop and zig-zag phases, the moth will still perform surge actions whenever it detects the pheromone again.
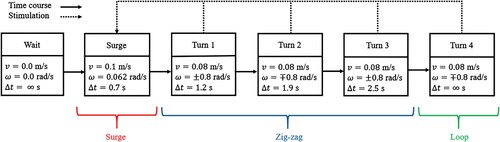
We can encode this behaviour into an artificial agent, like a mobile robot, by encoding three movement patterns within the sequence of linear velocities, angular velocities, and the corresponding time for state transitions. There are big differences in the size and the locomotion of a typical mobile robot and a real silkworm moth, therefore, we can not use exactly the velocity values and the delay time between each movement state of the moth. In an earlier study, Shigaki et al. [Citation24] developed a time-varying moth-inspired (TVMI) algorithm that adjusts action duration based on the stimuli received by a robot during the search process. Specifically, It classifies the moth as being in the surge state if its absolute angular velocity is less than 0.087 rad/s and its linear velocity exceeds 0.001 m/s [Citation24, Citation25].
In our experiments with robots, an action a is described by a tuple consisting of three elements: linear velocity, angular velocity, and blank duration . The action a is selected from the set of available action
and the blank duration is the time elapsed since the last gas detection. Using TVMI, the artificial agent utilized for this study has its velocity and duration for each action set fixed adopted from previous studies [Citation24,Citation26]. The available actions are: wait
, surge
, first turn
, second turn
, third turn
, and loop
. Minor adjustments have been made to surge and turning's duration and velocity to accommodate differences in size and locomotion between the robot and a silkworm moth. These adjustments have been established by the robot designers through our experiential knowledge.
Initially, the agent waits until it detects the first stimulus before initiating a “surge” action. A zigzag pattern ensues with a maximum of three turns in alternating directions. The fourth turn persists until another stimulus triggers the agent to surge again, creating a loop. The flowchart illustrating the reactive method for a mobile robot is depicted in Figure . Each box represents a behavioural action, with the state and its corresponding duration displayed in the upper and lower boxes, respectively.
Figure 1. State transition diagram showing behavioural state and its corresponding duration of a robot mimics silkworm moth behaviour.
2.2. Infotaxis
The Infotaxis algorithm employs Bayesian inference to optimize the probability of source location accuracy. With the Infotaxis, an odour source-searching agent endeavours to pinpoint the source by moving in a way that maximizes the information entropy gain within the probability map for the source location. Provided a predefined plume dispersion model, the agent could estimate its probability of detecting gas in future actions. New observed measurements from sensors independent from previous observation
will be used to update the posterior probability of the gas source location
. The Bayesian inference can be used to update the gas location probability:
(1)
(1) To optimize the updating in posterior probability i.e. reducing the uncertainty of the distribution optimally, the agent needs to gain maximum information entropy in each action a in the set of available moving actions,
. The agent then chooses an optimal action
where the expected entropy gain for each action is calculated using the Kullback-Leibler (KL) divergence. The KL divergence measures information gain by treating any changes in the probability distribution as a net gain of information, even if it leads to increasing entropy. This allows the distribution to escape local entropy minima caused by local gas concentration maxima [Citation27,Citation28].
In the Equation (Equation2(2)
(2) ) the “hit” indicates the detection of gas
and “miss” indicates no gas detection with
.
(2)
(2) However, in obstructed environments where a plume dispersion model is computationally expensive, it is necessary to make short-range estimations of the odour plume's location using sensory information and track its propagation within the environment's geometry [Citation27]. In addition, to extend the ability of the Infotaxis to investigate different areas in the environment quickly and widely, the PD method [Citation20] is introduced. The method begins by dividing the environment where the OSL is conducted into sub-environments
with a resolution lower than the gridmap resolution used in the Infotaxis algorithm. The selection of resolution for dividing sub-environments depends on the environmental geometry and the presence of obstacles. At each movement of the robot, the value of each cell in the global map is updated, hence updating the overall value of sub-environments. A transition from any sub-environment
to a promising sub-environment
occurs when it shows a higher overall probability of containing the source compared to the other sub-environments. Given the cell at column j and row k in the probability map of the whole environment is denoted as
, the agent will jump from the current position to the promising sub-environment:
(3)
(3) If a cell with a high probability of containing the source is known, we could perform an exploitation action by making the robot move directly to the location to ascertain the source's location. However, in OSL problems, not only one but multiple cells with a high probability of containing the source are usually observed but turn out to contain nothing. They are local maxima created by the exploration-lacking decisions of the robot when it tries to interpret solely gas concentration delivery from turbulent airflow. This causes robots most directly to certain cells over the environments as depicted in [Citation20] as jump actions and jumping frequency. This reduces the search time and sometimes interrupts the robot's status of being inside the plume flow from the source. One advantage of defining sub-environments with low resolution is to average out cells with local maxima to adjacent cells. If a cell with a high probability of containing the source is known, the adjacent cells should also have high values. In Section 3, we will utilize the PD method as the benchmark to evaluate our proposed RPD method through experiments conducted with a robot in the real world.
3. Reactive-probabilistic-deterministic method
Taking the Infortaxis algorithm as the intermediate substance, we integrate the PD method and the Hybrid olfactory search method in [Citation26] into the RPD method. It's evident that the agent should employ the reactive method while within the primary plume flow originating from the source and switch to the probabilistic method when it moves away from this primary plume flow. The challenge lies in how the agent can accurately determine its position relative to the primary plume flow where the gas is invisible and its flow varies significantly due to turbulence and interaction with obstacles. To address this issue, we utilize the concept of “burstiness” between the blank durations of gas detection [Citation26,Citation29]. Burstiness, denoted by b, is utilized to determine if a signal exhibits periodicity. When the agent stays within the primary plume flow, we anticipate frequent gas detections occurring at a consistent rate, leading to periodic intervals between these detections. Taking into account a list of recorded blank durations with a mean of
and a standard deviation of
, the burstiness is calculated as:
(4)
(4) b has a value in the range of
. As b approaches the negative boundary, the signal becomes more periodic. Conversely, as it moves in the opposite direction, the signal becomes more uncorrelated. When the agent experiences gas detection with periodical blank durations, it prefers to switch to the Reactive search method. An activation function is established to activate the switching based on the burstiness.
(5)
(5) Here, β represents a parameter that is adjusted to determine the desired sensitivity of the switch in relation to periodic gas detection signals. We empirically set
for our experiment involving a real robot. A positive value of the activation function
will activate the switch from the Probabilistic method to the Reactive method. When
, the agent will make a decision to switch back to the probabilistic method. In order to achieve accurate gas detection using the raw data obtained from slow-response-reactive time gas sensors, we utilize an Autoregressive with Exogenous Input (ARX) model [Citation30] to generate a binary gas response output. In the end, our RPD search method consists of three types of moving strategies with two switching activate signals. The flow of the RPD search method is programmed under the algorithm.
4. Experiments and result
4.1. Experiment setup
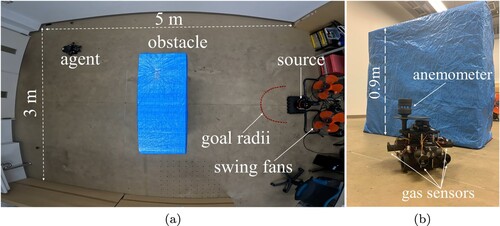
The proposed method is evaluated using an autonomous mobile robot shown in Figure (b). The robot is equipped with four gas sensors (MiCS5524 from Adafruit, US) sensitive to Ethanol with concentrations from 10 to 500 ppm [Citation31]. Each gas sensor comes with a brushless 12 V DC fan forming a gas intake module to mimic the sniffing action of animals. On top of the robot is one ultrasonic anemometer (FT205EV from FT Technologies, UK) [Citation32] which can provide measurements of wind angle and wind speed. The robot is also equipped with a 360-degree Light Detection and Ranging (LiDAR) sensor to determine the robot's position using SLAM technology. We conducted experiments using Ethanol as the source. Ethanol is released into the environment using a battery-operated auto spray, with its open/close mechanism controlled by an Arduino microcontroller. The flow rate is managed both manually by adjusting the spray knob and electronically through the duty cycle of the ethanol release signal sent from the microcontroller. In our experiments, Ethanol is released at a flow rate of 0.16 mL/s with a frequency of 0.4 Hz, employing a pulse width of 250 microseconds.
Figure 2. Experiment environment setup. (a) An indoor environment featuring an Ethanol source with a rectangular obstacle positioned at centre and (b) Odour source searching robot.
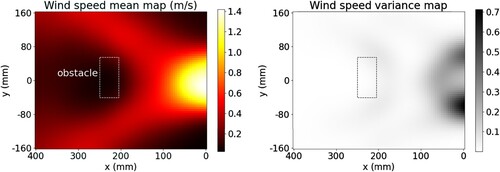
The experiments are conducted in an indoor environment measuring 3 meters in width and 5 meters in length in Figure (a). The indoor environment tested was enclosed with closed windows and the room's ventilation system was turned off. However, between experiments, ventilation was activated for at least 5 minutes to refresh the environment and minimize lingering odors. Room temperature averaged C. Two industrial floor fans were positioned at the source location and kept rotating throughout the experiment to generate random turbulent airflow, assessing search algorithm generalization. Fans were set to the lowest speed level to maintain continuous rotation. However, due to manufacturing flaws, two fans exhibited phase lag. This variability was considered in our study to evaluate our search algorithm's adaptability to random environmental conditions. Wind speed was determined by averaging measurements taken across the grid map over one minute. The DM+V method [Citation15], used for gas concentration mapping, was applied to extrapolate wind speed points across the room, allowing us to create an average wind speed distribution map as shown in Figure .
Figure 3. Wind speed distribution maps.
One rectangular-shaped box placed in the middle of the room acts as an obstacle. The dimensions of the obstacle have a width of 0.4 meters, a length of 1 meter, and 0.9 meters in height. The cell size or the resolution of the gridmap used for the probabilistic method is set at 0.5 meters. We put a time constraint of 800 seconds for the search time and any search that takes overtime is considered a failure. Our proposed method was evaluated under two distinct experimental scenarios: one with the application of the PD method and one with our proposed RPD method. Twenty trials are conducted for each scenario, assessed based on the success rate of source detection, search time, and total travelled distance. In our experimental environment, we deliberately selected a starting location distant from the gas source and positioned it behind an obstacle. Consequently, we did not test the reaction-alone method because if gas detection fails to initiate the initial stimulus, the robot will remain stationary.
4.2. Results and discussion
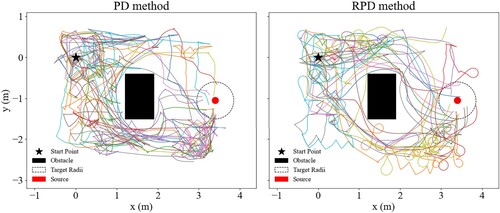
All of the trajectories in 40 trials are shown in Figure . Taking the obstacle location as the reference, the robot when moving on the left side of the environment moves in the same patterns for both the PD method and the RPD method. The trajectories cover a wide range of the area as a sign of exploration-focus actions. This is due to the lack of gas detection and the low frequency of detecting gas since most of the ethanol plumes are held back by the obstacle's presence. Most gas detections on the left side of the environment are sparse so the robot only inferences them for updating the probability map of the source location, instead of reacting to them. It is a contraction on the right side of the environment when the robot follows the RPD method. In this area, the robot frequently detects gas, and in response, the reactive mode of the method is activated. Instead of moving according to the probabilistic map, the robot moves reactively based on sensory information from the gas sensor. Therefore, the trajectories of the RPD method are narrower and centred on the primary plume flow. This led to a lower search time and shorter travelled distance compared to the PD method.
Figure 4. Comparison of trajectories: utilizing PD Method (20 cases) versus RPD method (20 cases).
In Table , the search time and travelled distance are recorded and averaged over all trials. Even though the success rate in both methods are the same at 90%, it clearly depends on how we chose the search time limitation. The RPD method is expected to yield a higher success rate when time constraints are reduced, given that its average search time is 30% lower than that of the PD method, decreasing from 460.41 seconds to 308.99 seconds. The enhancement is also evident in the reduction of travelled distance when the agent employs the RPD method. The decrease from 14.73 meters to 13.30 meters represents a 10% reduction in the distance covered.
Table 1. Comparative analysis: success rate, search time, and travelled distance of odour source search robot employing PD method (20 trials) versus RPD method (20 trials).
The high deviation in results is primarily due to the randomness of environmental factors at the start, rather than the robot's initial pose. In all experiments, the robot starts from the same pose. The starting angle does not determine the next destination on the grid map, as the agent is considered a point on the map. However, the heading angle dictates the robot's movement to the next destination. Regarding gas information sampling, the robot tends not to detect any gas when it turns back to the source when we equip two sensors in front of the robot to mimic species across the animal kingdom. We attempted to solve the problem of the starting angle by equipping the robot with uniformly distributed sensors around it.
Randomness is expected in the rotating fans and gas release. In each experiment, the gas source is released 1–2 min before the search begins, following at least five minutes of air refreshment. The fans run continuously with uncontrolled rotation directions and angles. Only room temperature, humidity, fan speed, fan location, source location, release rate, and source concentration are kept constant.
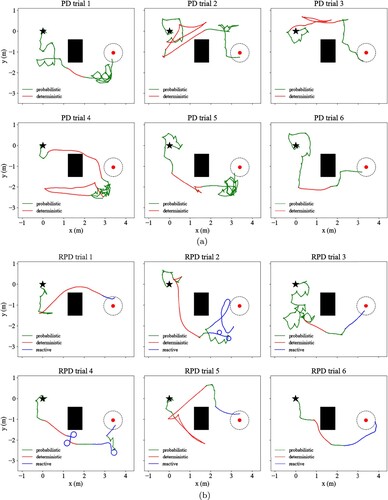
Figure showcases various individual trajectories, each represented by path colors corresponding to the specific reactive, probabilistic, or deterministic mode the agent was following. The red-coloured path (deterministic mode) consistently serves as the escape route for the agent to exit the sub-environment with a low rate of gas detection, caused by the obstacle blocking the airflow. The path where the agent moves following the reactive mode is depicted in blue and is usually observed from the source towards the nearby side of the obstacle, signifying an effective direct move towards the source. Sometimes, the reactive is excessive leading to an over-excited movement as at the end of the search in trial 2 and trial 4 in Figure (b). The green path (probabilistic mode) provides wide coverage on the left side at the initial stages for obtaining the initial gas detection. The occurrence is similar in areas directly adjacent to both sides of the source, where there is minimal gas to detect despite the proximity to the source. This is attributed to the fan dispersing most gas particles away from the source location.
Figure 5. Differences in trajectories and movement patterns of agent finding odour source using PD method compared to RPD method. (a) Example trajectories of an agent using PD method and (b) Example trajectories of an agent using RPD method.
5. Conclusion
In this study, we have successfully implemented both the reactive method and the probabilistic method within the RPD approach. Our proposed method significantly reduces search time and travelled distance, which is highly desirable for time-sensitive tasks such as OSL in disasters and ensuring safety. During the experiments, the probabilistic method functioned well in the initial stages as an exploratory action. However, as the agent approached the source and detected gas frequently, its reactive behaviour enabled effective plume tracking, resulting in direct exploitation, and a shorter path to the source. Whenever over-excited movements occurred, leading the robot out of the plume, the robot found its way to navigate back using the probabilistic method. In the majority of trials, all components within the RPD method were activated, underscoring the significance of each component at various stages of odour search. This achieves a balance between exploration and exploitation in Odor Source Localization, ensuring a robust equilibrium between the agent's plume-finding and plume-tracking actions.
In this study, a preliminary step of mapping the unknown environment using SLAM before performing the OSL task is omitted. Consequently, we assume the robot possesses prior knowledge of the environment, enabling obstacle avoidance to be easily performed with a LiDAR sensor. While air quality assessment in controlled environments such as airports or factories poses no challenge, for the practical deployment of rescue robots to disaster locations, further research should address unknown environments where the robot needs to conduct odour-guided environmental exploration.
Disclosure statement
No potential conflict of interest was reported by the author(s).
Additional information
Funding
Notes on contributors
Duc-Nhat Luong
Duc-Nhat Luong received a B.Eng. in Mechatronics Engineering from the Hanoi University of Science and Technology, Hanoi, Vietnam, in 2019, and an M.Eng. in Systems and Control Engineering from the Tokyo Institute of Technology, Tokyo, Japan, in 2022. He is currently a PhD candidate at the Tokyo Institute of Technology, focusing on bio-inspired robotics and motion planning algorithms.
Huu Quoc Dong Tran
Huu Quoc Dong Tran received a B.Eng. in Robotics Engineering from VNU University of Engineering and Technology Hanoi, Vietnam in 2022. He is currently a Master's student at the Tokyo Institute of Technology, focusing on motion planning algorithms.
Daisuke Kurabayashi
Daisuke Kurabayashi received the B.Eng., M.Eng., and Ph.D. degrees in precision mechanical engineering from the University of Tokyo, Tokyo, Japan, in 1993, 1995, and 1998, respectively. He worked with the Institute of Physical and Chemical Research (RIKEN), Saitama, Japan, as a Post-Doctoral Researcher from 1998 to 2001. Since 2001, he has been with the Tokyo Institute of Technology, Tokyo, where he is currently a Professor with the Department of Systems and Control Engineering and the Associate Dean of the School of Engineering. His research interests include bio-inspired robotics, distributed autonomous systems, and motion planning algorithms.
References
- Bushdid C, Magnasco MO, Vosshall LB, et al. Humans can discriminate more than 1 trillion olfactory stimuli. Science. 2014;343(6177):1370–1372. doi: 10.1126/science.1249168
- Ishida H, Hayashi K, Takakusaki M, et al. Odour-source localization system mimicking behaviour of silkworm moth. Sens Actuators A: Phys. 1995;51(2):225–230. doi: 10.1016/0924-4247(95)01220-6
- Grasso F, Consi T, Mountain D, et al. Biomimetic robot lobster performs chemo-orientation in turbulence using a pair of spatially separated sensors: progress and challenges. Rob Auton Syst. 2000;30:115–131. doi: 10.1016/S0921-8890(99)00068-8
- Demir M, Kadakia N, Anderson HD, et al. Walking Drosophila navigate complex plumes using stochastic decisions biased by the timing of odor encounters. eLife. 2020;9:Article ID e57524.
- Beebe SC, Howell TJ, Bennett PC. Using scent detection dogs in conservation settings: a review of scientific literature regarding their selection. Front Vet Sci. 2016;3:96. doi: 10.3389/fvets.2016.00096
- Kanzaki R, Sugi N, Shibuya T. Self-generated zigzag turning of bombyx-mori males during pheromone-mediated upwind walking. Zool Sci. 1992;9(3):515–527.
- Shigaki S, Yamada M, Kurabayashi D, et al. Robust moth-inspired algorithm for odor source localization using multimodal information. Sensors. 2023;23(3):1475. doi: 10.3390/s23031475
- Lilienthal A, Reimann D, Zell A. Gas source tracing with a mobile robot using an adapted moth strategy. In: Autonome Mobile Systeme 2003; Berlin, Heidelberg. Springer BerlinHeidelberg Vol. 12; 2003. p. 150–160.
- Russell R, Bab-Hadiashar A, Shepherd RL, et al. A comparison of reactive robot chemotaxis algorithms. Rob Auton Syst. 2003;45(2):83–97. doi: 10.1016/S0921-8890(03)00120-9
- Alt W. Biased random-walk models for chemotaxis and related diffusion approximations. J Math Biol. 1980;9(2):147–177. doi: 10.1007/BF00275919
- Vergassola M, Villermaux E, Shraiman B. “infotaxis” as a strategy for searching without gradients. Nature. 2007;445:406–409. doi: 10.1038/nature05464
- Loisy A, Eloy C. Searching for a source without gradients: how good is infotaxis and how to beat it. Proc R Soc A: Math Phys Eng Sci. 2022;478:Article ID 20220118.
- Wiedemann T, Shutin D, Lilienthal AJ. Model-based gas source localization strategy for a cooperative multi-robot system – a probabilistic approach and experimental validation incorporating physical knowledge and model uncertainties. Rob Auton Syst. 2019;118:66–79. doi: 10.1016/j.robot.2019.03.014
- Lilienthal A, Duckett T. Creating gas concentration gridmaps with a mobile robot. In: Proceedings 2003 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2003) (Cat. No.03CH37453); Vol. 1; 2003. p. 118–123. Las Vegas, NV, USA. doi:10.1109/IROS.2003.1250615.
- Lilienthal AJ, Reggente M, Trincavelli M, et al. A statistical approach to gas distribution modelling with mobile robots – the kernel dm+v algorithm. In: 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems; St. Louis, MO, USA, 2009. p. 570–576. doi: 10.1109/IROS.2009.5354304.
- Sutton RS, Barto AG. Reinforcement learning: an introduction. 2nd. Cambridge, MA, USA: The MIT Press; 2018.
- Rando M, James M, Verri A, et al. Q-learning to navigate turbulence without a map. ArXiv. 2024 04.
- Hernandez-Reyes C, Shigaki S, Yamada M, et al. Learning a generic olfactory search strategy from silk moths by deep inverse reinforcement learning. IEEE Trans Med Robot Bionics. 2022;4(1):241–253. doi: 10.1109/TMRB.2021.3129113
- Liu S, Zhang Y, Fan S. Adaptive space-aware infotaxis ii as a strategy for odor source localization. Entropy. 2024;26(4):302. doi: 10.3390/e26040302
- Luong DN, Kurabayashi D. Odor source localization in obstacle regions using switching planning algorithms with a switching framework. Sensors. 2023;23(3):1140. doi: 10.3390/s23031140
- Haratsu T, Sakaue M, Matsukura H, et al. Simulating a gas source localization algorithm with gas dispersion produced by recorded outdoor wind. In: ROBOT2022: Fifth Iberian Robotics Conference. Cham: Springer International Publishing; 2023. p. 105–116.
- Hassan S, Wang L, Mahmud KR. Robotic odor source localization via vision and olfaction fusion navigation algorithm. Sensors. 2024;24(7):2309. doi: 10.3390/s24072309
- Shiota Y, Sakurai T, Daimon T, et al. In vivo functional characterisation of pheromone binding protein-1 in the silkmoth, bombyx mori. Sci Rep. 2018;8(1):13529. doi: 10.1038/s41598-018-31978-2
- Shigaki S, Sakurai T, Ando N, et al. Time-varying moth-inspired algorithm for chemical plume tracing in turbulent environment. IEEE Robot Autom Lett. 2018;3(1):76–83. doi: 10.1109/LRA.2017.2730361
- Minegishi R, Takashima A, Kurabayashi D, et al. Construction of a brain–machine hybrid system to evaluate adaptability of an insect. Rob Auton Syst. 2012;60(5):692–699. doi: 10.1016/j.robot.2011.06.012 Mobiligence: intelligence for generating adaptive motor function.
- Hernandez-Reyes C, Shigaki S, Kurabayashi D. Effect of the agent size on the performance of an infotactic and a hybrid olfactory search based on the burstiness of odor pulses. In: 2021 18th International Conference on Ubiquitous Robots (UR), Gangneung, Korea (South); 2021. p. 458–463. doi: 10.1109/UR52253.2021.9494650.
- Ojeda P, Monroy J, Gonzalez-Jimenez J. Information-driven gas source localization exploiting gas and wind local measurements for autonomous mobile robots. IEEE Robot Autom Lett. 2021;6(2):1320–1326. doi: 10.1109/LSP.2016.
- Hutchinson M, Liu C, Chen WH. Information-based search for an atmospheric release using a mobile robot: algorithm and experiments. IEEE Trans Control Syst Technol. 2019;27(6):2388–2402. doi: 10.1109/TCST.87
- Goh KI, Barabási AL. Burstiness and memory in complex systems. EPL-Europhys Lett. 2008;81(4):48002. doi: 10.1209/0295-5075/81/48002
- Shigaki S, Fikri MR, Kurabayashi D. Design and experimental evaluation of an odor sensing method for a pocket-sized quadcopter. Sensors. 2018;18(11):3720. doi: 10.3390/s18113720
- Adafruit mics5524 co/alcohol/voc gas sensor breakout; 2023. Available from: https://learn.adafruit.com/adafruit-mics5524-gas-sensor-breakout/
- Ft205 – lightweight wind sensor for drones; 2023. Available from: https://fttechnologies.com/wind-sensors/lightweight/ft205/