
ABSTRACT
The progress of technology in our current world continues to advance each day, benefiting human beings in various ways. One significant development in recent time is the emergency of automated vehicles, which have the potential to revolutionise transportation. These vehicles utilise electric power, sensors, cameras and sound navigators to carry out their intended operations without causing environmental pollution. Currently, there are several autonomous companies, primarily located in California, cities like San Francisco (Cruise), Palo Alto (Tesla), Fremont (Pony.ai), Santa Monica (Motional), Mountain View (Waymo), and Foster city (Zoox). This paper aims to review the utilisation level and performance of autonomous vehicles, specially focusing on the goals set for 2023. By analysing various research studies and company profiles, this paper aims to provide insights into the current status of autonomous vehicles and their practical applications. It employs quantitative and statistical methods to extract valuable information from these studies. Also, this paper examines the state of the art in autonomous vehicles and the impact of gaps in machine learning algorithms, from perception to execution. The data used for this study are obtained from research reviews and updated profile of different companies. The assessment reveals a significant increase in research and development activities related to autonomous and automated vehicles across various disciplines since 2010. Specifically, the number of research studies on autonomous driving vehicles has increased from 302 to 2718, while studies on automated vehicles have increased from 1379 to 6085. In the Engineering discipline alone, there have been 601 studies on autonomous driving vehicles and 341 studies on automated vehicle-related research, which have increased to 2685 and 1865, respectively in the specified time.
1. Introduction
The traditional transportation system is becoming increasing mixed-up and inefficient. According to the Vienna convention (UN Citation1968) many countries signed at a time ‘every moving vehicle or combination of vehicles shall have a driver’ and ‘every driver shall at all times be able to control his vehicle’. On 23 March 2016, a change to the Vienna Convention went into effect. As a result, ‘the driver, still in control of the vehicle, can be helped by a system under some conditions’ as long as the system can be overridden or shut off by the driver (Transport Citation2015). However, it has been stated that other changes must allow automated vehicles on roads in many countries. Mitchell (Citation2015), proposes a ‘new deoxyribonucleic acid (DNA)’ for automobile in their book ‘Reinventing the Automobile’, envisioning vehicle that are electrically driven, powered by electric motors, energised by electricity and hydrogen, electronically controlled, and intelligently interconnected with the goals of a sustainable future with zero emissions, renewable energy, crash avoidance, safe social networking while driving, autonomous driving (as an option), varied designs, and shrouded in mystery. Early forms of automation include electronic stability control (Af Wåhlberg and Dorn Citation2023), lane departure warning (Navarro et al. Citation2024), adaptive cruise control (Hidayatullah and Juang Citation2021), lane keeping and centring (Elzen Citation2015), pedestrian detection (day/night), self-parking (Thunyapoo and Ratchadakorntham Citation2020, traffic sign and signal detection (Bai et al. Citation2023; Qiao Citation2023), and vehicle-to-vehicle communication (Dhurve and Soman Citation2021; Muslam Citation2024).
According to the Society of Automotive Engineering (Williams Citation2021), vehicle automation has been adopted globally. It was updated level by level, step by step, for more improvements. Implies six levels of automation (from 0 to 5) are differentiated based on the onboard driver assistance systems, i.e. the distribution of driving task between the vehicle and the driver. On , some explanations are provided to offer an overview of self-driving vehicles. On level 0, there is no automation, however, on level 1, some automation is possible, with the car controlling either steering or acceleration/braking. A combination of autonomous functions on level 2 enables the automobile to take over steering and acceleration/braking tasks at the same time. On levels 3 and 4, the automobile generally accomplishes everything that the driver would have to do otherwise, with the exception that on level 3, the automobile is unable to do everything in order to notify the driver when he or she must regain control. In contrast, no control may be reclaimed by the driver at level 4. The third and fourth levels of automation are meant when talking about self-driving or autonomous cars in this study because both include cars that are generally capable of doing all driving tasks on their own and in level 3 only in some unknown situations the driver has to do the driving again. This paper contributes a comprehensive assessment on autonomous vehicles state of the arts based on different disciplines discussed in Section II. Picking five different research mortar apparatuses with different research disciplines complete this study paper.
Table 1. Impacts of AV on cities transportation/pros(right) and cons(left) (Maheshwari Citation2018).
It covers the sustainable systems of the world, which encompasses a discussion that covers status of zero tailpipe emission vehicles. The first below shows more clarification symbolically on the levels of AV.
Figure 1. Comparison of vehicle operating models of automated driving levels (Williams Citation2021).
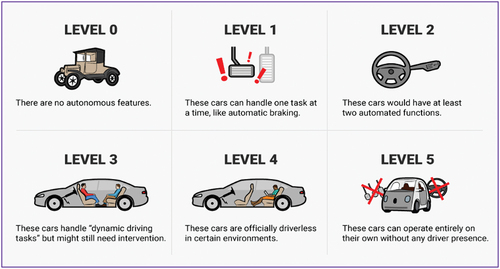
The automotive industry and media have muddled the language used to discuss automated driverless systems. Redundantly, the terms autonomous, driverless, and self-driving conceal more than they reveal. To clarify, SAE International created definitions for various levels of automation, which were elaborated on, and put them on a scale of decreasing reliance on the driver. The hierarchy offers some unexpected results. Level four automations, for example, may be more tractable than the preceding level, which is level three. The same is true for the next, i.e. level five automated systems-electronic chauffeurs capable of handling every driving situation without human intervention, which are decades away.
2. Contributions
This study attempts to provide a comprehensive and organised ways of the state of the arts to automated vehicles. It focuses on automated and/or autonomous vehicles research related status with different disciplines by selecting five goals, i.e. book chapters, conference abstracts, encyclopaedias, research papers and reviews. This study aims to fill the gap by providing a comprehensive overview of the existing literatures and publications on sustainable engineering. In addition, we discuss the existing conditions from both societal and industrial perspective. This paper covers companies, the state of arts in their present condition, gaps and challenges related to machine learning algorithms of automated vehicles plus their vulnerability, and their implementations. Finally, we outline future research directions as per our findings.
3. Methods
In this review work, the literature coverage is considered in comparison of open scientific sources published recently, which is not greater than 5 years except some conventions and mandatory reference books. To obtain sufficient coverage of the works related with AV, we used the following scientific databases to search through the literature: Scopus, Elsevier, Google scholar, Hindawi, Springer, MPDI, Research gate, SAGE, BASE, SCISPACE, semantic scholar, and others. To fit the objectives as uttered on the titles, we used different English language keywords such as autonomous vehicle, automated system, AV companies, controllers, AV environmental perception, impacts of AV, AV machine learning algorithms etc. Analytical systems for scrutiny were part of it, and current statistical data were used to assess the status of AV plus plots in graphical style on an Excel sheet.
4. Theories on positive and negative aspects of transportation automation
As per scholars for the past 20 years, there has been an enormous advancement in the field of automated driving technologies.
Frankly speaking, it significantly increases the vehicles’ active safety and efficiency from an energy saving point of view. Thus, now a day its frontier in automotive engineering research, a new path of the automobile industry and beside this one it’s a new source of financial growth for stakeholders (Teixeira, d’Orey, and Kokkinogenis Citation2020). At present, the benefits or hazards of AVs are just hypothetical. For AV transitions to have a substantial impact, nearly full market penetration of automated vehicles is required, and predictions for such a lengthy time horizon are necessarily uncertain (Maheshwari Citation2018). Different challenges such as traffic conditions (Funke et al. Citation2016; Zhang, Zhao, and Jiao Citation2023) in which they are expected to drive with other autonomous vehicles on the same road while also monitoring pedestrian movements, road conditions (Park, Lee, and Han Citation2015), while it operates on automated vehicle roads it should be recommended to follow the predefined ways; Accident liability (Uzair Citation2021), implies when they react to situations when their attention is desired, it may be too late to prevent the conditions. Lidar and Radar effect (Bilik et al. Citation2019; Hassan Citation2022) can be shown as, Radar cannot pass through walls with high accuracy because the beams scatter as they reach the wall, resulting in a false positive which means information is incorrect and other artificial and emotional intelligence is affected. shows the compiled pros and cons of automated vehicles as follows.
At the moment, the pros or cons of AVs are just hypothetical. For the AV revolution’s effects to be seen, almost full market penetration of fully autonomous cars is required, and predictions for such a lengthy time horizon are necessarily uncertain. Each mobility, time, space, safety, and environmental concerns have own impact whether positive or negative. As is obvious, the benefits of automation might just as readily translate to threats, depending on the underlying assumptions. Planning and decisions might improve one region while jeopardising another. Many concepts of urban design have been proposed that address both sides of the spectrum. Concepts on described as follow.
4.1. Mobility
It concerns allowing some people to move while confining others (Millard-Ball Citation2018). Unfortunately, AVs provide previously unserved populations with unfamiliar mobility alternatives, such as those with impairments, elders, and children. However, in order to maximise the effectiveness of AVs, even more limitations on walkers and bicycles, such as grade separated sidewalks or barriers, may be imposed, effectively limiting their movement.
4.2. Time
Effective use of time or travel time which is very mandatory point. Travellers may save time by using a better-managed and integrated transportation systems, parking, and more productive in vehicle time (Litman Citation2023; Lutin Citation2015). On the other hand, increased demand from better managed traffic may, ironically, contribute to congestion. New demand from individuals who were previously unable to drive, as well as excursions away from healthy modes like walking and cycling, might all contribute to congestion.
4.3. Space
It determines either better expansion or better spatial efficiency. In perspective, AVs condition will be predicted as it occupies less space and can drive with higher precision, hence current street design regulations should be altered. For example, changing four lane roadways to five lane highway with the help of minimum cost of investment (Hayeri Citation2015). However, the research of (Litman Citation2018) indicate that as AVs become available, the attraction of suburban residential districts that are greener or cheaper would grow.
4.4. Safety
Because the majority of road accidents are caused by driver error, AVs are assumed to have the potential to drastically reduce accidents (Fagnant and Kockelman Citation2015; Litman Citation2020). However, there may still unanswered problems regarding culpability in the event of an accident, its vulnerability to cyber-attacks, and loss of privacy owing to continuous location tracking.
4.5. Emissions
Shorter headways, coordinated platoons, and more effective route choices are predicted to allow AVs to use existing roads and junctions more efficiently, resulting in fuel savings (Fagnant and Kockelman Citation2015; Hayeri Citation2015). On the other hand, we can predict increasing overall travel distance owing to expansion, additional non driver travel demand, and stimulated demand due to travel time reductions, decreased congestion, and, paradoxically, fuel savings.
On the other hand, the sustainability of the system influences the benefits of AVs through emissions, accidents, traffic congestion, and legislation. First, emissions cause environmental hazards to living things. When compared to a human-driven vehicle, autonomous vehicles utilise less gasoline and energy. The majority of gas is consumed when travelling at high speeds, stopping, and often re-accelerating. Self-driving vehicles eliminate these elements from their driving style, resulting in less gasoline used or battery power utilised, and hence less air pollution. Driverless cars also imply fewer automobiles per family. One autonomous car can literally take you to all of your places, so families may avoid having two or three automobiles to accommodate the demands of each individual. It is also projected that as driverless car technology advances, the weight of automobiles will decrease because of lower batteries, modifications to the engine, and a reduced need for hefty safety features. Second, safety is most important for human survival. For sure, crashing is caused by humans, not cars. Human drivers are the most dangerous component of the driving experience, whether due to reckless driving, human mistakes, texting, driving, or simply being preoccupied behind the wheel. The third is traffic congestion, which is another title. In addition to pollutants and city haze, most city inhabitants find traffic congestion inconvenient. Highways and thoroughfares take up valuable urban real estate, leaving little to no space for pedestrians, bicycles, or parks. When all vehicles on the road are autonomous, congested city streets and highways will become a distant memory. Lastly, while the technology appears to be too attractive in terms of possible advantages and enhanced safety, the government remains concerned about autonomous vehicles. Driverless automobiles are now permitted in some developed countries, such as California, Michigan, and Florida, other states by considering legislation. Therefore, introducing autonomous vehicles is part of sustainable engineering for environmental conservation.
Even though the system will be designed to extend human life by reducing risks through crashes that are hunting human beings in millions. Colleagues (Sharath and Mehran Citation2021) from Canada state two basic plausible cases resulting in a crash: environmental perception and motion planning. If a crash has occurred, the mean is summarised by three points. First, both are imperfect. Second, it could be solely attributed to erroneous environmental perception and lastly, sole imperfections of motion planning, while the other is reversed. They are considered non-sociable because they cannot interact with other drivers by definition. This results as they fail to consider other vehicles, for example, during mergers. On the other hand (Jiang, Xie, and Evans Citation2023), the systems of automated vehicles, even though they depend on AI, it is difficult to implement courtesy in the algorithms. Based on the research analysis done on traffic accidents from 2015 to 2017 (Petrović, Mijailović, and Pešić Citation2020), inspects the severity of rear end collisions on automated vehicles is greater than that on conventional vehicles based on the assessment and results, the collision of automated vehicle is 35.9% greater than the crash with conventional vehicles. This simply implies that rear end collision of an AV is higher comparatively based on the US state of California DMV reports. shows figurative statistics of the accident level comparison.
Figure 2. Performance of the automated vehicle from the conventional vehicle perspective in rear-end collisions.
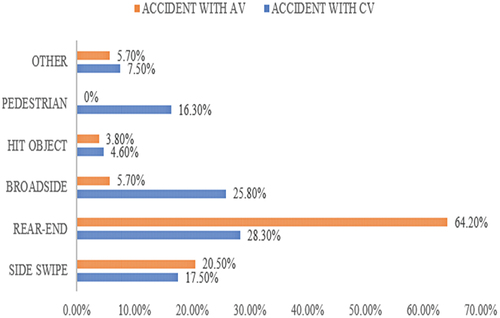
In , on the other hand, the data from the same source from 2015 to 2019 shown on (Song, Chitturi, and Noyce Citation2021) explains that the most common types of AV collisions were rear-ended (62%) and sideswipe (21%). Injuries were reported in 12% of the collisions, with no distinction between light and major.
4.6. Automated vehicle implementation predictions
As seen via the lens of AV technology, most of our auto makers are working on SAE-3rd and SAE-4th level vehicle (SAE Citation2023). It has been said, might be available on the road in short terms. However, in spite of the optimistic announcements made by some companies, most forecasts agree as shown below in and . It might take a long time to make SAE level 5, which means fully automated vehicles, and much more to achieve a significant implementation rate with the whole vehicle fleet (Martínez-Díaz and Soriguera Citation2018).
Table 2. AV implementation stage and its impacts (Litman Citation2023).
Table 3. AV implementation predictions set its levels per year.
Victoria Transport Policy Institute forecasts the development and implementation of autonomous vehicles from various perspectives, as shown in . The assumptions include the availability of level 5 autonomous vehicles, which is discussed in Section IV, in the late 2020s. However, it should be noted that these vehicles are initially expensive and have limited performance. Additionally, without regulations in place, it may take several decades for the market to become saturated with autonomous vehicles, as some drivers may still prefer human-operated vehicles due to cost and personal preference. These estimations are a compilation of (Grush and Niles Citation2016; Lavasani, Jin, and Du Citation2016; Simonite Citation2016).
Different research reviews state, a sort of factors that influence the deployment of self-driving vehicles. Litman (Citation2023) introduces those factors like the rate of technological advancement or the speed of technological developments is somehow long i.e. before automobiles may run independently under all usual settings, significant technological advancements are required (level-4). According to the present conditions, the most outstanding level, which is last in our review, will be available in 5 to 25 years. Second, their testing and regulatory approvals are mandatory in autonomous vehicles. Although it is currently under development, it may take many years for these standards to be implemented in most jurisdictions, and more time will be needed for large-scale testing. The others include Incremental costs, service quality and affordability, consumer travel and housing preferences and development practices. The other very crucial point is public policies, which are another backbone for the implementation of autonomous vehicles. Chen et al. (Citation2022) target to synthesise on the past research regarding public acceptance attitude towards AVs and elaborate significant issues such as the uncertainty of AV adoption experiments, policy implement and action plans, AV related infrastructure uncertainties and demand models as future approaches for analysing AV consequences.
On the other hand, when it is seen from an AV technological perspective, most of our auto makers are working on SAE-3rd and SAE-4th level vehicles. As it has been said, might be available on the road in short terms. However, in spite of the optimistic announcements made by some companies, most forecasts agree as shown in the below tables. It might take a long time to make SAE level 5, which means fully automated vehicles, and much more to achieve a significant implementation rate with the whole vehicle fleet.
shows different data sources with different points of view on their implementations depending on their own reasons for SAE-L4, SAE-L5 and CAV environmental setups for applications. On the other hand (Zhao et al. Citation2021), highlights and emphasises potential improvements to the high-level driving strategy design by classifying existing autonomous vehicle driving to defensive driving strategies, competitive driving strategies, negotiated driving strategies, and cooperative driving strategies.
5. Results
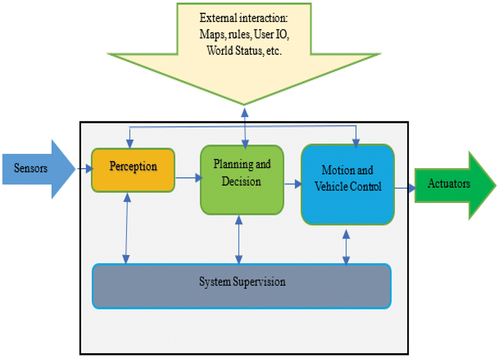
Before explaining the statistical conditions, most researchers are upgrade the system operations by compiling those mandatory components. Perception of execution steps may pass through different struggling and hardy ways even though the operation could be completed in a second. Making decisions is one of the most difficult tasks that automated vehicles perform, especially in awkward situations. It may include prediction, path planning, and obstacle avoidance. All of which are based on previous perceptions done (Martínez-Díaz and Soriguera Citation2018).
above under this section (V), explains the processes that take place in automated vehicles input to output, following steps sequentially form sensors, perception, planning and decision, motion and vehicle control, and the actuators that take place for operations cooperatively one to the others.
Figure 3. Input to output process of the AV.
Since 2010, there has been an increase in the involvement of different disciplines in autonomous and automated vehicle areas. Our focus is on 2010 and beyond, targeting to provide the latest information regarding these vehicles. below show research on autonomous and automated vehicles in all disciplines and engineering disciplines until the end of 2022. Autonomous vehicles, which are self-driving and can have self-decision capacity, are researched in different disciplines as follows: All disciplines i.e. Engineering, Computer Science, Social Sciences, Environmental Sciences, Energy, Decision Sciences, Medicine and Dentistry, Biochemistry, Genetics and Molecular Biology, Business, Management and Accounting, Agricultural and Biological Sciences are included in the research areas. Engineering is one of the target disciplines for our study. By defining their areas of application and similarity, the research is conducted by synonyms for different reasons. The basic reason this can be done in this area is to get acceptance from different h-index publishers around the world. Therefore, autonomous driving vehicles and automated vehicles in this discipline’s research are also increasing. Let’s see the automated vehicle research done from 2010 on, like the figures shown below with all disciplines.
Figure 4. Autonomous vehicle driving all disciplinary research status.
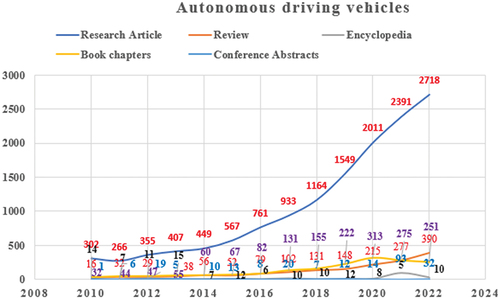
Figure 5. Automated vehicle for all disciplinary research status.
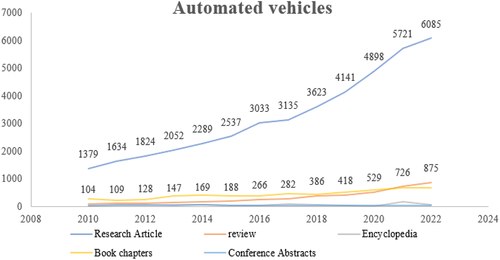
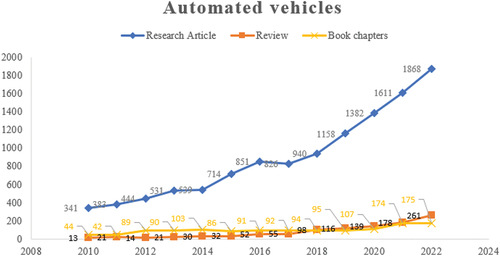
Figure 6. Autonomous vehicle driving engineering (only) discipline research status.
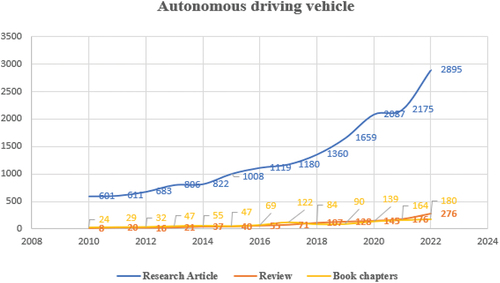
Figure 7. Automated vehicle engineering discipline (only) research status.
, depicts a decrease in the number of research articles published on autonomous driving vehicles across all disciplines from 2010 t0 2011, followed by a slight increase from 2011 to 2018. From 2018 to 2022, the variation is doubled (1164 to 2718), while conference papers are almost the same. In below, the same variables were used for testimony, but the subject was automated vehicles.
Autonomous driving vehicle and Automated vehicles with engineering discipline may include almost all of them, such as Mechanical, Environmental, Computer, System, Electrical, Industrial, Electronic, computer science and Engineering, Civil, Aerospace, Nuclear, Safety and other disciplines included in these scenarios shown on and .
These have been collected by survey done with the biggest data holding institution with immense guarantees called backbone for researchers worldwide, which is Science direct.
5.1. Current companies in autonomous vehicle research and utilization level
There are more than 55 companies of AV for both software and hardware installation, however there are no commercially viable autonomous vehicles that go beyond 2nd and 3rd automation. It worth nothing that new companies are challenging conventional manufacturers, while some are already on the market, such as Tesla and others, are testing and adjusting different setups for the future. Test driving, on the other hand, is already common. In late 2009, Nevada granted Google permission to test autonomous vehicles. In Europe, countries such as Germany, the Netherlands, and the UK allow AV testing. On the other hand, a number of federal states in the US have approved or amended rules to enable autonomous test driving under specific situations. It is unforgettable that in 2018, Singapore completed a test of self-driving taxis. Japan intends to use driverless taxis on a significant scale during the 2020 Tokyo Olympics. Furthermore, autonomous buses are used in a various location, mainly in controlled environments. There are about 55 companies with autonomous vehicle research status in our current world. Most of them are working on software for AI, while others are on the technical side. A summary of their research status is shown in .
Table 4. Summary of automated vehicle companies and their background.
5.2. Gaps and challenges in machine learning algorithms for AV driving applications
Algorithms for AVs are inputs because they operate without human intercession. Lack of these properly set algorithms makes the system faulty in some actions. This deficiency includes; techniques and sensors used in AV, uninclusiveness of different country scenarios, and problems with some system components such as varying climatic conditions, especially in the case of navigation systems. Radar interference, climatic, traffic, and street conditions are the front facing challenges in navigation systems (Prasath Citation2020). Beyond those, security risks of adversarial attacks, which are not considered primarily a safety, rather a security limitations and procedural safeguards for machine learning safety, which focus on diminishing the misuse of system due to lack of instructions and unawareness (Carlini Citation2017; Mohseni Citation2019). Obviously stated, machine learning is a subtype of artificial intelligence that enables users to equip their systems to operate in the grey region of fuzzy logic, which perhaps looks like human intelligence. This problem with machine learning algorithms may affects the entire operating system. The reason behind this is that all localisation, tracking, and detection are performed by first contact with the objects, which is called perception. All other followers are enhanced either positive or negative ways. This implies that all identification, decision, control, and executions are succeeding. Thus, still today, there is lack of very successful and matching algorithms that are 100% proper for completely remove errors and made transportation more comforted in current genuine world. But hope for future transportation systems, it will happen.
5.3. Gaps and challenges with machine learning methods include the following
5.3.1. Data quality and quantity
A large amount of high-quality data is required to train effectively. These data can be difficult and expensive to collect, especially for rare or unexpected events (Hussain and Zeadally Citation2018).
5.3.2. Bias
Machine learning algorithms can learn biases from the data on which they are trained. This can lead to autonomous vehicles making discriminatory or unsafe decisions (Danks Citation2017).
5.3.3. Explain ability
It can be difficult to explain why machine learning makes a particular decision. This can make it difficult to identify and fix errors in the algorithm (Kolekar et al. Citation2022).
5.3.4. Robustness
Machine learning algorithms can be vulnerable to adversarial attacks, where carefully crafted inputs are designed to fool the algorithm (Fényes et al. Citation2021; Phan Citation2023).
5.3.5. Cybersecurity
AVs are vulnerable to cyberattacks, which could cause them to malfunction or even be hacked (Aurangzeb Citation2023; Giannaros et al. Citation2023; Sadaf et al. Citation2023). It is important to develop robust cybersecurity measures to protect AVs from these threats. Ghosh et al. (Citation2023) provides a rigorous threat analysis and risk assessment approach based on mathematical modelling to detect cyber-physical risks to AV perception systems that are crucial for AV driving behaviour and complex intersections in their operational design area.
5.3.6. Legal and ethical considerations (Altunyaldiz Citation2020; Landini Citation2020; Poszler Citation2021)
A number of legal and ethical considerations need to be addressed before AVs can be widely deployed. For example, how should liability be determined in the event of an accident involving an AV? How should AVs be programmed to make decisions in complex ethical situations?
5.3.7. System failures
Autonomous vehicles rely on complex software and hardware systems, and any failure in these systems could lead to an accident (Mishler and Chen Citation2023).
5.3.8. Human error
Even though autonomous vehicles are designed to operate without human input, there are still situations where human intervention may be necessary. If the human driver does not take appropriate action in these situations, an accident could occur (Mueller, Cicchino, and Zuby Citation2020).
5.3.9. Unforeseen circumstances
Autonomous vehicles are trained on large datasets of real-world data, but it is impossible to anticipate every possible situation that a vehicle may encounter on the road. This means that autonomous vehicles may not be able to respond appropriately to unforeseen circumstances, such as a sudden construction zone or pedestrian jaywalking. Despite these vulnerabilities, autonomous vehicles have the potential to revolutionise transportation. They can make roads safer and more efficient, and to provide new mobility options for people with disabilities and other underserved populations. As technology continues to develop and be tested, we can expect to see autonomous vehicles become increasingly common on our roads. Sample algorithms and their relevant configurations are shown in the below.
Table 5. Comparable table based on different automated vehicle machine learning algorithms.
These are only a small sample of the many machine learning algorithms that can be used for AVs. The best algorithm and configuration for a particular task will depend on a variety of factors, such as the specific requirement of the task, available computational resources, and developer expertise.
5.4. Current status of DMV autonomous vehicle driverless testing permitted companies with ML algorithms
The following () shows summary of the current status of some of the DMV Autonomous Vehicle Driverless Testing permitted companies, with a focus on the challenges and gaps with machine learning methods and their vulnerabilities in autonomous driving.
Table 6. Current autonomous vehicle driverless testing permitted companies, algorithms, challenges and gaps, and their vulnerability.
According to (Nations Citation2019), a combination of different functions in particular are required to develop the functional performance of automated/autonomous vehicles. Of those functions for driving, minimum risk manoeuvre, transition demand, environmental monitoring (headway, side, rear), lateral control (i.e. lateral discipline), longitudinal control (acceleration, braking and road speed), transition demand, Human machine interface (HMI) both internal and external and Drive monitoring for applications. ISO (Citation2018) defined functional safety as the absence of unreasonable risk due to any potential source of harm caused by malfunctioning behaviour of electrical and/or electronic systems. This means that a malfunctioning behaviour is not limited to failures but also includes unintended behaviour (with respect to design intents).
5.5. Principles of functional performance requirements
Hence, functional performance was the backbone for vehicle operations, guided by principles for fitness of ideas. A requirement that focusses on functional be a formal indicating ‘shall statement’ that specifies a task or activity carried out by an ITS unit. While saying this, wants to elaborate that each functional need is unique and discrete, specifying the tasks that an ITS system obliged to execute. This needs introductory comments like (Unec Citation2020) vehicle definitions and classifications, high level approach, operational domain, autonomy, accidents, free of unreasonable safety risks, disruption of the flow of normal traffic, destruction of property, and rational vs reasonable before knowing operational design domains, i.e. describes the operating conditions under which an ADS or feature thereof is specifically designed to function (Standard).
Operational design domain (Environmental conditions): weather, geolocation, road features, and manoeuvres. Machine operates based on the manufacturer’s settings either editable by user or once set. To be productive, following the route set by producer should be enhanced per the agenda. Light, radio waves, forces, and sounds must be sensed as the first message from the ordered instrument and localised. The localised message could be perceived to predict the conditions next to that and adjust for planning. Hence, planning determines the order of all good or bad messages. The planned information based on predictions controlled for steering, brake, throttle, and commands that are tangibly applied. explains briefly as follows.
Figure 8. AV functional performance hierarchies.
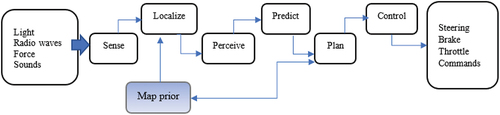
shows very basic AV functional architectures that have been elaborated in more detail (Badue et al. Citation2021; Yurtsever et al. Citation2020). Sense a various sensing modality. While map prior provides static map data and localises’ to calculate position, orientation, and motion of vehicles, it will perceive to calculate drivable area and obstacle location and motions.
To estimate future motion of dynamic objects, it predicts the perceived information.
Later, plan the predicted information to calculate a desired trajectory for the vehicle and control it to execute the trajectory as steering, brake, and throttle commands for applications.
Software impacts the implementation of perceiving and controlling information in either positive or negative ways. shares more information on functional performance as follows.
Table 7. (SAE Citation2018) Reliability requirements, functions, and software information.
The table presents definitions and compiles dependability terms and concepts from the ECSE, IEEE, and ISO standards. The functional requirements of San Francisco Bay area regional ITS architecture was selected based on the area’s ITS services. As a result, these requirements have been tailored to the specific stakeholders, inventory, and regional objectives (Bay Area Citation2022; Transportation Citation2023). The mandatory functional requirements include Archive Data Repository, Archive government reporting, archive online analysis and mining, archive situation data archival, BIAC Data Collection, Border Inspection, Border Inspection administration, and others.
5.6. Operational requirements
The ITS operational concept is a stakeholder-focused approach to ITS operational features.
While the service packages depict the flow of information between ITS elements to fulfil activities, the operational model explains the roles and duties of stakeholders in establishing, running and maintaining the regions’ ITS. Each stakeholder’s tasks and obligations are defined in the operational concept. These are associated with the implementation and operation of ITS. The operational concept describes what each stakeholder is required to do on a managerial and operational level in order to fulfil some area stakeholder’s current and prospective roles and responsibilities. While operational safety is enhanced, operational requirements succeed. There should be a universal approach as on , for the evaluation of AV safety, as shown below.
Figure 9. Overall approach for evaluation of AV safety.
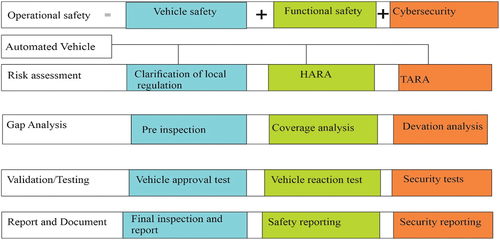
explains, operational safety as a result of vehicle safety, functional safety, and cybersecurity for automated vehicles. Vehicle safety encompasses the physical vehicle itself, including its hardware and software (Nhtsa Citation2022; Wang et al. Citation2020). Ensures whether the vehicle is physically capable of safety operating in its environment. This includes components such as brakes, airbags, and tyres, as well as the software responsible for controlling the vehicle’s systems. Functional safety, on the other hand, focuses on the safety of the vehicle’s functions (Joseph Citation2021). This includes its ability to perceive its surroundings and make informed decisions which are safe and appropriate. It involves elements like sensors, cameras, and algorithms that enable the vehicle to understand its environment. Cybersecurity, the third crucial factor, involves protecting the vehicle’s systems from cyberattacks (Kim et al. Citation2021). This encompasses measures such as firewalls, intrusion detection systems, and secure coding practices. All three of these factors play vital role in ensuring the operational safety of automated vehicles. If any of these factors are compromised, it could result in a safety-critical incident.
6. Conclusions
Autonomous vehicles are currently the focus of research in today’s world. Researchers and scientists are working on sustainable systems for the environment, which has gained acceptance from manufacturers and societies. According to researchers, automated driving systems (ADSs) promise a safe, comfortable, and efficient driving experience. However, users are still not fully ready to accept this system. Unfortunately, the number accidents involving vehicles equipped ADSs is increasing, as seen in daily and monthly reports. The lack machine learning algorithms is the main reason for environmental perception. Until the state-of-the-art technology is strengthened and given more attention, the full potential of ADSs cannot be realised in our current reality. There is a lack of trust in societies when it comes to accepting driverless vehicles. Companies are transitioning from production to the trial/intern stage on their own roads. California is the city with the highest number companies manufacturing autonomous vehicles, and the California Department of Motor Vehicle reports every crash with automated vehicles on a daily basis. Statistical data collected from Science Direct was used for research conducted in 2010 and later to end of 2022. The research covered various disciplines such as health, computer science, environmental science, social science, decision science, and engineering. Graphical representations were used to analyse autonomous and automated vehicles separately, based on research articles, reviews, book chapters, encyclopaedias, and conference abstracts. The utilisation levels of different companies were identified based on abstracts, with Tesla, Waymo (Google), and Cruise being the most prominent in autonomous vehicle production and system investigations. Based on the reviewed research papers, articles, and conference papers, the researchers conclude:
From a statistical point, it has been observed that the state of the art for automated vehicle related research slowly increasing since 2010, while autonomous vehicles started to rise in 2011 across all disciplines. On the other hand, in engineering (only) disciplines, research on automated vehicles is increasing more than autonomous driving vehicles.
All operations of autonomous/automated vehicles depend on algorithms to perceive the environment. Therefore, machine learning algorithms should be improved to reduce the risk of crashes.
6.1. Future works for researcher
Hence, research related to automated and autonomous vehicles is currently underway, but there may be some deficiencies in the field. Therefore, future researchers should focus on the following areas:
Investigating the shortcomings of algorithms used in automated and autonomous vehicles to improve the overall research on this AI system.
Conducting research specifically on companies that offer software and system related packages to identify and review their capabilities.
Developing enhanced algorithms to reduce vehicle accidents and comparing them with existing systems.
Identifying the algorithms used by each autonomous vehicle company and assessing their reliability to ensure the production of error free and safe vehicles. Additionally, it is important to consider cost and consumer preference when studying the adoption of automated and autonomous vehicles.
List of abbreviations
| ADS | = | Automated Driving System |
| AV | = | Automated Vehicle |
| AVs | = | Autonomous Vehicles |
| BASE | = | Bifield Academic Search Engine |
| CAVs | = | Connected and Automated Vehicles |
| CNNs | = | Convolutional Neural Networks |
| DNA | = | Deoxyribonucleic Acid |
| DQN | = | Deep Q-Network |
| GANs | = | Generative Adversarial Networks |
| GRU | = | Gated Recurrent Unit |
| HARA | = | Hazard Analysis and Risk Assessment |
| LSTM | = | Long short-term memory |
| R-CNNs | = | Region based Convolutional Neural Network |
| RNNs | = | Recurrent neural networks (RNNs) |
| RL | = | Reinforcement Learning |
| RNNs | = | Reinforced Neural Networks |
| SAE | = | Society of American Engineers |
| SAGE | = | Open access, peer-reviewed, academic mega journal |
| TARA | = | Threat Analysis and Risk Assessment |
| UK | = | United Kingdom |
| US | = | United States |
Authors contributions
Conceptualisation, T.K.K. and G.G.; Methodology, T.K.K.; Software, T.K.K.; Validation, G.G. and G.F.D.; Formal analysis, T.K.K. and G.F.D.; Investigation, T.K.K.; Resource, T.K.K.; Data curation, T.K.K, G.G. and G.F.D.; Writing original draft preparation, T.K.K., Writing review and editing, G.G. and G.F.; Visualisation, T.K.K, G.G. and G.F.; Supervision, G.G. and G.F.D.; Project administration, G.G. and G.F.D.
Acknowledgments
The authors would like to acknowledge Adama Science and Technology University for providing facilities particularly for support under the post graduate research fund scheme.
Disclosure statement
No potential conflict of interest was reported by the author(s).
Data availability statement
We can encourage that the data we have used in this paper are available on our hands and we can be ready to provide when necessary.
Additional information
Notes on contributors
Teshome Kumsa Kurse
Teshome Kumsa Kurse is a Ph.D. candidate in Automotive Engineering at Adama Science and Technology University. He has received his Masters degree in Automotive Engineering from Adama Science and Technology University, Bachelor degree from Wollega University in Mechanical Engineering stream of Motor Vehicle. He was University Lecturer.
Girma Gebresenbet
Girma Gebresenbet is a Professor, PhD and Head of Division of Automation and Logistics at the Swedish University of Agricultural Sciences, Department of Energy and Technology. His MSc degree is in Mechanical Engineering and obtained honor degree, specialized in Design and Development. His PhD is in Agricultural Engineering, and obtained a special reward from the Swedish Academy of Forestry and Agriculture for the outstanding doctoral dissertation of the year. He is a professor since 2000 and working on Logistics, Transport, and Supply Chain Management. Currently, Gebresenbet is coordinating and managing many national and international research projects, where researchers and industry partners participated from many countries, mainly in the subject areas of Automation.
Geleta Fikadu Daba
Dr. Geleta Fekadu Daba holds a Ph.D. in Thermal Engineering from the Department of Mechanical and Industrial Engineering at the Indian Institute of Technology Roorkee (IITR) in India. He received his Masters degree from Adama Science and Technology University in Automotive Engineering and his Bachelor degree from Addis Abeba University in Mechanical Engineering. Currently he is Universty Lecturer.
References
- Af Wåhlberg, A. E., and L. Dorn. 2023. “The Effects of Electronic Stability Control (ESC) on Fatal Crash Rates in the United States.” Journal of Safety Research.
- Alam, M. K., A. Ahmed, R. Salih, A. F. S. Al Asmari, M. A. Khan, N. Mustafa, M. Mursaleen, and S. Islam. 2023. “Faster RCNN Based Robust Vehicle Detection Algorithm for Identifying and Classifying Vehicles.” Journal of Real-Time Image Processing 20 (5): 93. Springer. https://doi.org/10.1007/s11554-023-01344-1.
- Altunyaldiz, Z. 2020. “Legal Aspects of “Autonomous” Vehicles.” Council of Europe, Committee on Legal Affairs and Human Rights: 1–14. https://assembly.coe.int/. Doc. 15143, report of the Committee on Legal Affairs and Human Rights, rapporteur: Mr Ziya Altunyaldiz.
- Aurangzeb, S. A. 2023. “Cybersecurity for Autonomous Vehicles Against Malware Attacks in Smart-Cities.” Cluster Computing 27(3): 1–16. Springer.
- Badue, C., R. Guidolini, R. V. Carneiro, P. Azevedo, V. B. Cardoso, A. Forechi, L. Jesus, et al. 2021. “Self-Driving Cars: A Survey.” Expert Systems with Applications 165:113816. Elsevier. https://doi.org/10.1016/j.eswa.2020.113816.
- Bai, W., J. Zhao, C. Dai, H. Zhang, L. Zhao, Z. Ji, and I. Ganchev. 2023. “Two Novel Models for Traffic Sign Detection Based on YOLOv5s.” Axioms 12 (2): 160. MDPI. https://doi.org/10.3390/axioms12020160.
- Bay Area, C. 2022. https://itsbayarea.mtc.ca.gov/about.
- Bilik, I., O. Longman, S. Villeval, and J. Tabrikian. 2019. “The Rise of Radar for Autonomous Vehicles: Signal Processing Solutions and Future Research Directions.” IEEE Signal Processing Magazine 36 (5): 20–31. IEEE. https://doi.org/10.1109/MSP.2019.2926573.
- Bloomberg. 2017. Taming the Autonomous Vehicle: A Primer for Cities, 117. New York, USA: Aspen Institute Center for Urban Innovation.
- Carlini, N. 2017. “Adversarial Examples Are Not Easily Detected: Bypassing ten Detection Methods.” Proceedings of the 10th ACM Workshop on Artificial Intelligence and Security, 3–14. University of California, Berkeley.
- Chen, Y., N. Shiwakoti, P. Stasinopoulos, and S. K. Khan. 2022. “State-Of-The-Art of Factors Affecting the Adoption of Automated Vehicles.” Sustainability 14 (11): 6697. MDPI. https://doi.org/10.3390/su14116697.
- Cloud, B. 2020. “Apollo.” https://developer.apollo.auto/index.html.
- Danks, D. A. 2017. “Algorithmic Bias in Autonomous Systems.” IJCAI 17 (2017): 4691–4697.
- Dhurve, N., and S. Soman. 2021. “Vehicle to Vehicle System for Congestion Control and Performance Validation.” Available at SSRN 3874869.
- Elzen, C. L. 2015. Lane Keeping System and Lane Centering System. Google Patents, US Patent 9,180,908.
- Fagnant, D. J., and K. Kockelman. 2015. “Preparing a Nation for Autonomous Vehicles: Opportunities, Barriers and Policy Recommendations.” Transportation Research Part A: Policy and Practice 77:167–181. https://doi.org/10.1016/j.tra.2015.04.003.
- Feng, Y., X. Yan, and D. Zhang. 2022. “Support Vector Machine Based Lane-Changing Behavior Recognition and Lateral Trajectory Prediction.” Computational Intelligence and Neuroscience 2022:1–9. Hindawi. https://doi.org/10.1155/2022/3632333.
- Fényes, D. H., T. Hegedus, B. Németh, and P. Gáspár. 2021. “Robust Control Design for Autonomous Vehicles Using Neural Network-Based Model-Matching Approach.” Energies 14 (21): 7438. MDPI. https://doi.org/10.3390/en14217438.
- Fingscheidt, T. G. 2022. Deep Neural Networks and Data for Automated Driving: Robustness, Uncertainty Quantification, and Insights Towards Safety, Edited by Sebastian Houben. Switzerland AG: Springer Nature. https://doi.org/10.1007/978-3-031-01233-4.
- Funke, J., M. Brown, S. M. Erlien, and J. C. Gerdes. 2016. “Collision Avoidance and Stabilization for Autonomous Vehicles in Emergency Scenarios.” IEEE Transactions on Control Systems Technology 25 (4): 1204–1216. https://doi.org/10.1109/TCST.2016.2599783.
- Gehrke, S. R., A. Felix, and T. G. Reardon. 2019. “Substitution of Ride-Hailing Services for More Sustainable Travel Options in the Greater Boston Region.” Transportation Research Record 2673 (1): 438–446. SAGE Publications Sage CA: Los Angeles, CA. https://doi.org/10.1177/0361198118821903.
- Ghosh, S., A. Zaboli, J. Hong, and J. Kwon. 2023. “An Integrated Approach of Threat Analysis for Autonomous Vehicles Perception System.” Institute of Electrical and Electronics Engineers Access 11:14752–14777. https://doi.org/10.1109/ACCESS.2023.3243906.
- Giannaros, A. K., A. Karras, L. Theodorakopoulos, C. Karras, P. Kranias, N. Schizas, and G. Kalogeratos. 2023. “Autonomous Vehicles: Sophisticated Attacks, Safety Issues, Challenges, Open Topics, Blockchain, and Future Directions.” Journal of Cybersecurity and Privacy 3 (3): 493–543. MDPI. https://doi.org/10.3390/jcp3030025.
- Godsmark, P., and B. Kirk. 2015. “Automated Vehicles: The Coming of the Next Disruptive Technology.” trid.trb.org.
- Grush, B., and J. Niles. 2016. “Driverless Cars Ahead: Ontario Must Prepare for Vehicle Automation.” Residential and Civil Construction Alliance of Ontario (RCCAO).
- Gupta, A. 2018. “Machine Learning Algorithms in Autonomous Driving.” IIoT World.
- Hassan, S. S. 2022. “Lidar Sensor in Autonomous Vehicles.” Research. gate(https://www.researchgate.net/publication/359263639).
- Hayeri, Y. M. 2015. “Potential Impacts of Vehicle Automation on Design, Infrastructure and Investment Decisions-A State Dot Perspective.” trib.trd.org.
- Hidayatullah, M. R., and J. C. Juang. 2021. “Adaptive Cruise Control with Gain Scheduling Technique Under Varying Vehicle Mass.” IEEE Access 144241–144256. https://doi.org/10.1109/ACCESS.2021.3121494.
- Hussain, R. A., and S. Zeadally. 2018. “Autonomous Cars: Research Results, Issues, and Future Challenges.” IEEE Communications Surveys & Tutorials 21 (2): 1275–1313. https://doi.org/10.1109/COMST.2018.2869360.
- Inc, Z. n.d. https://zoox.com/autonomy.
- Iso, I. O. 2018. ISO 26262 :2018 Road Vehicles Functional Safety: Geneva, Switzerland.
- Jiang, L., Y. Xie, and N. G. Evans. 2023. “A Simulation Study of Cooperative and Autonomous Vehicles (CAV) Considering Courtesy, Ethics and Fairness.” PLOS ONE 18 (5): e0283649. https://doi.org/10.1371/journal.pone.0283649.
- Joseph, L. A. 2021. Autonomous Driving and Advanced Driver-Assistance Systems (ADAS): Applications, Development, Legal Issues, and Testing. Boca Raton: CRC Press.
- Kim, Y., and H. Bang. 2018. “.” Introduction and Implementations of the Kalman Filter 1:1–16.
- Kim, K. K., J. S. Kim, S. Jeong, J.-H. Park, and H. K. Kim. 2021. “Cybersecurity for Autonomous Vehicles: Review of Attacks and Defense.” Computers & Security 103:102150. Elseiver. https://doi.org/10.1016/j.cose.2020.102150.
- Kolekar, S. G., S. Gite, B. Pradhan, and A. Alamri. 2022. “Explainable AI in Scene Understanding for Autonomous Vehicles in Unstructured Traffic Environments on Indian Roads Using the Inception U-Net Model with Grad-CAM Visualization.” Sensors 22 (24): 9677. MDPI. https://doi.org/10.3390/s22249677.
- Kuhnert, F., and C. Stürmer. 2018. Five Trends Transforming the Automotive Industry. Berlin, Germany: PricewaterhouseCoopers GmbH Wirtschaftsprüfungsgesellschaft.
- Landini, S. 2020. InsurTech: A Legal and Regulatory View, 291–312. Springer, Cham: Springer. https://doi.org/10.1007/978-3-030-27386-6_14.
- Lavasani, M., X. Jin, and Y. Du. 2016. “Market Penetration Model for Autonomous Vehicles on the Basis of Earlier Technology Adoption Experience.” Transportation Research Record 2597 (1): 67–74. SAGE Publications Sage CA: Los Angeles, CA. https://doi.org/10.3141/2597-09.
- Litman, T. 2018. Autonomous Vehicle Implementation Predictions. BC, Canada: Victoria Transport Policy Institute Victoria.
- Litman, T. 2020. “Autonomous Vehicle Implementation Predictions: Implications for Transport Planning.”
- Litman, T. 2023. Autonomous Vehicle Implementation Predictions. Victoria, BC, Canada: Victoria Transport Policy Institute (www.vtpi.org).
- Lutin, J. M. 2015. “The Challenge of Planning for a World of Automated Vehicles–Definitions, Characteristics, and Modal Use Considerations.”
- Magna, R. O. May 1, 2023. “Magna International.” Accessed May 24, 2023. https://www.magna.com/docs/default-source/2023-news-press-releases/magna-2023-q1-pr-(combined).pdf?sfvrsn=a7303d76_1.
- Maheshwari, T. 2018. “How Will Automation in Transport Flows Impact Future Urban Form?“ Constructing an Urban Future, United Arab Emirates, Abu Dhabi, March 2018. 18:19.
- Martínez-Díaz, M. A., and F. Soriguera. 2018. “Autonomous Vehicles: Theoretical and Practical Challenges.” Transportation Research Procedia 33:275–282. Elsevier. https://doi.org/10.1016/j.trpro.2018.10.103.
- Ma, J. X., H. Xie, K. Song, and H. Liu. 2021. “A Bayesian Driver Agent Model for Autonomous Vehicles System Based on Knowledge-Aware and Real-Time Data.” Sensors, MDPI 21 (2): 331. https://doi.org/10.3390/s21020331.
- Memon, M. M., M. A. Hashmani, A. Z. Junejo, S. S. Rizvi, and K. Raza. 2022. “Unified DeepLabv3+ for Semi-Dark Image Semantic Segmentation.” Sensors 22 (14): 5312. MDPI. https://doi.org/10.3390/s22145312.
- Millard-Ball, A. 2018. “Pedestrians, Autonomous Vehicles, and Cities.” Journal of Planning Education and Research 38 (1): 6–12. https://doi.org/10.1177/0739456X16675674.
- Mishler, S. A., and J. Chen. 2023. “Effect of Automation Failure Type on Trust Development in Driving Automation Systems.” Applied Ergonomics 106:103913. Elsevier. https://doi.org/10.1016/j.apergo.2022.103913.
- Mitchell, W. J.-B. 2015. “Reinventing the Automobile.” In Personal Urban Mobility for the 21st Century. Reprint, MIT’s Media Lab: MIT press. https://books.google.com.et/books?id=32Nbb26J9iEC.
- Mohseni, S. P. 2019. “Practical Solutions for Machine Learning Safety in Autonomous Vehicles.” arXiv preprint arXiv:1912.09630.
- Mueller, A. S., J. B. Cicchino, and D. S. Zuby. 2020. “What Humanlike Errors Do Autonomous Vehicles Need to Avoid to Maximize Safety?” Journal of Safety Research 75:310–318. Elsevier. https://doi.org/10.1016/j.jsr.2020.10.005.
- Muslam, M. M. 2024. “Enhancing Security in Vehicle-To-Vehicle Communication: A Comprehensive Review of Protocols and Techniques.” Vehicles 6 (1): 450–467. MDPI. https://doi.org/10.3390/vehicles6010020.
- Nations, U. 2019. “World Forum for Harmonization of Vehicle Regulations.” Economic Commission for Europe (ECE/TRANS/WP.29/1147).
- Navarro, J., E. Reynaud, M. Pelerin, M. C. Ouimet, C. Gabaude, and D. Schnebelen. 2024. “Visual and Steering Behaviours During Lane Departures: A Longitudinal Study of Interactions Between Lane Departure Warning System, Driving Task and Driving Experience.” Ergonomics 67 (1): 81–94. Tylor and Francis. https://doi.org/10.1080/00140139.2023.2205620.
- Nguyen, H. 2019. “Improving Faster R-CNN Framework for Fast Vehicle Detection.” Mathematical Problems in Engineering 2019:1–11. Hindawi Limited. https://doi.org/10.1155/2019/3808064.
- Nhtsa, N. H. 2022. https://www.nhtsa.gov/technology-innovation/automated-vehicles-safety.
- Park, M., S. Lee, and W. Han. 2015. “Development of Steering Control System for Autonomous Vehicle Using Geometry‐Based Path Tracking Algorithm.” ETRI Journal 37 (3): 617–623. Wiley Online library. https://doi.org/10.4218/etrij.15.0114.0123.
- Pérez-Gil, Ó., R. Barea, E. López-Guillén, L. M. Bergasa, C. Gómez-Huélamo, R. Gutiérrez, and A. Díaz-Díaz. 2022. “Deep Reinforcement Learning Based Control for Autonomous Vehicles in CARLA.” Multimedia Tools & Applications 81 (3): 3553–3576. Springer. https://doi.org/10.1007/s11042-021-11437-3.
- Petrović, Đ., R. Mijailović, and D. Pešić. 2020. “Traffic Accidents with Autonomous Vehicles: Type of Collisions, Manoeuvres and Errors of Conventional vehicles’ Drivers.” Transportation Research Procedia 45:161–168. Elsevier. https://doi.org/10.1016/j.trpro.2020.03.003.
- Phan, P. H. 2023. “Robust Autonomous Driving Control Using Auto-Encoder and End-To-End Deep Learning Under Rainy Conditions.” Proceedings of the 2023 8th International Conference on Intelligent Information Technology, New York, NY. https://doi.org/10.1145/3591569.3591616.
- Poszler, F. A. 2021. “AI and Autonomous Driving: Key Ethical Considerations.” Institute for Ethics in Artificial Intelligence, Technical University of Munich. 1–7.
- Prasath, G. S. 2020. “Application of Machine Learning Algorithms in Autonomous Vehicles Navigation System.” IOP Conference Series: Materials Science and Engineering, United Kingdom, 062028. IOP Publishing. https://doi.org/10.1088/1757-899x/.
- Qiao, X. 2023. Research on Traffic Sign Recognition Based on CNN Deep Learning Network, 826–837. United Kingdom: Procedia Computer Science, Elsevier.
- Reda, A., and J. Vásárhelyi. 2023. “Design and Implementation of Reinforcement Learning for Automated Driving Compared to Classical MPC Control.” Designs 7 (1): 18. MDPI. https://doi.org/10.3390/designs7010018.
- Riboni, A. G., N. Ghioldi, A. Candelieri, and M. Borrotti. 2022. “Bayesian Optimization and Deep Learning for Steering Wheel Angle Prediction.” Scientific Reports 12 (1): 8739. Nature Publishing Group UK London. https://doi.org/10.1038/s41598-022-12509-6.
- Sadaf, M. I., Z. Iqbal, A. R. Javed, I. Saba, M. Krichen, S. Majeed, and A. Raza. 2023. “Connected and Automated Vehicles: Infrastructure, Applications, Security, Critical Challenges, and Future Aspects.” Technologies 11 (5): 117. MDPI. https://doi.org/10.3390/technologies11050117.
- Sae, I. 2023. SAE Levels of Driving Automation™ Refined for Clarity and International Audience. USA: SAE Publisher.
- Sae, S. 2018. Taxonomy and Definitions for Terms Related to Driving Automation Systems for On-Road Motor Vehicles. SAE, USA: Standard.
- Shaheen, S., and H. Totte. 2018. “Future of Mobility White Paper.”
- Sharath, M. N., and B. Mehran. 2021. “A Literature Review of Performance Metrics of Automated Driving Systems for On-Road Vehicles.” Frontiers in Future Transportation 2:28. Frontiers. https://doi.org/10.3389/ffutr.2021.759125.
- Shladover, S. 2016. “The Truth About “Self-driving” Cars.” Scientific American, JSTOR 314 (6): 52–57. https://doi.org/10.1038/scientificamerican0616-52.
- Simonite, T. 2016. “Prepare to Be Underwhelmed by 2021’s Autonomous Cars.” MIT Technology Review.
- Song, Y., M. V. Chitturi, and D. A. Noyce. 2021. “Automated Vehicle Crash Sequences: Patterns and Potential Uses in Safety Testing.” Accident Analysis & Prevention 153:106017. Elsevier. https://doi.org/10.1016/j.aap.2021.106017.
- Sruthi, E. R. 2021. Understand Random Forest Algorithms with Examples. Palo Alto, CA: Analytics Vidhya.
- Ssctcc, T. S. 2018. Driving Change : Technology and the Future of the Automated Vehicle. Canada: YC19-0/421-9E-PDF.
- Steven, G. 2018. “A Survey of Ride-Hailing Passengers.”
- Teixeira, M., P. M. d’Orey, and Z. Kokkinogenis. 2020. “Simulating Collective Decision-Making for Autonomous Vehicles Coordination Enabled by Vehicular Networks: A Computational Social Choice Perspective.” Simulation Modelling Practice and Theory 98:101983. Elsevier. https://doi.org/10.1016/j.simpat.2019.101983.
- Thunyapoo, B., and C. Ratchadakorntham. 2020. “Self-parking Car Simulation Using Reinforcement Learning Approach for Moderate Complexity Parking Scenario.” 2020 17th International Conference on Electrical Engineering/Electronics, Computer, Telecommunications and Information Technology (ECTI-CON), Phuket, Thailand, 576–579. IEEE. June 2020.
- Transport, D. O. 2015. The Pathway to Driverless Car: Summary Report and Action Plan. UK: Department of Transport, UK.
- Transportation, U. S. March 11, 2023. National ITS Reference Architecture. Accessed June 15, 2023. https://www.arc-it.net/html/functionalobjects/functionalobjects.html.
- UN. 1968. Convention on Road Traffic. Vienna: Inland Transport Committee.
- Underwood, S. 2014. Automated, Connected, and Electric Vehicle Systems: Expert Forecast and Roadmap for Sustainable Transportation. Ann Arbor: Graham Institute for Sustainability, University of Michigan.
- Unec, U. N. 2020. “Functional performance requirements for automated driving systems and ADS equipped vehicles.” 5th GRVA session (Agenda item 4b).
- Uzair, M. 2021. “Who is liable when a driverless car crashes?.” World Electric Vehicle Journal 12 (2): 62. MDPI. https://doi.org/10.3390/wevj12020062.
- Velmurugan, D. K., and B. Mathumitha. 2019. “Automated vehicle: autonomous driving using SVM algorithm in supervised learning.” International Journal of Engineering Research & Technology.
- Vignarca, D., S. Arrigoni, and E. Sabbioni. 2023. “Vehicle localization Kalman filtering for traffic light advisor application in urban scenarios.” Sensors 23 (15): 6888. MDPI. https://doi.org/10.3390/s23156888.
- Wang, W. H., H. He, and C. Ma. 2023. “An improved Deeplabv3+ model for semantic segmentation of urban environments targeting autonomous driving.” International Journal of Computers Communications & Control 18 (6): e5879–e5879. https://doi.org/10.15837/ijccc.2023.6.5879.
- Wang, J. Z., L. Zhang, Y. Huang, J. Zhao, and F. Bella. 2020. “Safety of autonomous vehicles.” Journal of Advanced Transportation 2020:1–13. Hindawi Limited. https://doi.org/10.1155/2020/8867757.
- Waymo. 2022. https://waymo.com/.
- Williams, B. 2021. ““Automated Driving Levels,” in Automated Vehicles and MaaS: Removing the Barriers.” IEEE, 19–41. https://doi.org/10.1002/9781119765394.ch2.
- Xiao, P. J. 2021. “Autox.” https://www.autox.ai/en/index.html.
- Yurtsever, E., J. Lambert, A. Carballo, and K. Takeda. 2020. “A Survey of Autonomous Driving: Common Practices and Emerging Technologies.” Institute of Electrical and Electronics Engineers Access 8:58443–58469. IEEE. https://doi.org/10.1109/ACCESS.2020.2983149.
- Zhang, J., R. Zhao, and S. Jiao. 2023. “Optimization of Robust Formation Tracking Control for Traffic Cone Robots with Matching and Mismatching Uncertainties: A Fuzzy-set Theory-based Approach.” Expert systems with Applications 227:120233. https://doi.org/10.1016/j.eswa.2023.120233.
- Zhao, C., L. Li, X. Pei, Z. Li, F.-Y. Wang, and X. Wu. 2021. “A Comparative Study of State-of-the-art Driving Strategies for Autonomous Vehicles.” Accident Analysis\& Prevention 150:105937. Elsevier. https://doi.org/10.1016/j.aap.2020.105937.
- Zmud, J., and G. Goodin. 2017. “Advancing Automated and Connected Vehicles: Policy and Planning Strategies for State and Local Transportation Agencies.” No. Project 20–102 (01).
- Zmud, J. P., and I. N. Sener. 2017. “Towards an Understanding of the Travel Behavior Impact of Autonomous Vehicles.” Transportation Research Procedia 25:2500–2519. https://doi.org/10.1016/j.trpro.2017.05.281.
