
 ?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.
?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.ABSTRACT
Traffic safety is arguably the most important traffic metric from a human perspective. Still, many millions of people are killed on roads every year. In this paper, the concept of Herd Immunity for Traffic Safety (HITS) is presented for the first time. This concept focuses on identifying and describing the increased level of safety that is achieved when Connected Automated Vehicles (CAV) and Human Driven Vehicles (HDV) co-exist in mixed traffic. The underlying mechanism is described with a key component being the ability of CAVs to absorb human error and reduce exposure to risk. With increasing levels of CAV penetration, so-called tipping points occur in which the traffic safety grows in proportion to the penetration rate, which is demonstrated by the non-linearity of the penetration–risk relationship. This is demonstrated in theory and experimental cases while requirements to understand and apply the concept more extensively in the future are presented.
Introduction
While many papers on automated vehicles and traffic safety seem to churn out the same numbers in regard to road vehicle causalities, we must not become insensitive to the importance and significance of them. Worldwide, estimated 1.3 million people were killed on roads in 2018 (Organization Citation2018), with 36,096 being in the US with more than 2 million causalities in 2019 (FHWA Citation2020). At the same time, human error has contributed to more than 90% of these crashes (NHTSA Citation2008; Singh et al. Citation2016) with Human Driven Vehicles (HDV). Even if other causes also contribute, this remains a highly significant and relevant number. It should also be noted that the vast majority of serious crashes (resulting in injury) occur in situations with multiple vehicles (NSC Citation2020). Connected Automated Vehicles (CAV) are commonly mentioned in this regard to hold the key to being able to reduce the number and severity of crashes, especially where human error is prevalent (Arvin et al. Citation2020; Singh et al. Citation2016; Pütz, Murphy, and Mullins Citation2019). While there is no denying that there is a real potential for improvement with CAVs, many of the mechanisms that will get us there are yet undefined and unclear.
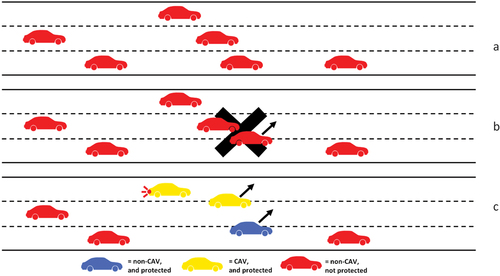
In this paper, we introduce the concept of Herd Immunity for Traffic Safety (HITS) with mixed CAV-HDV traffic as a key and important mechanism that can lead to the multiplier effects for the improvement of traffic safety with CAVs beyond the increased safety that they offer their own occupants. A simple example is shown in , in which an HDV performs a lane-change maneuver with another vehicle in its blind-spot resulting in an accident (). In the same case with two CAVs (), the CAVs are able to perform evasive maneuvers and absorb the risk created by the HDV avoiding an accident. In this case, a protected vehicle is one that is given an increased level of safety due to the presence of CAVs (we elaborate more on this in Section 2). This is the first paper to describe the mechanism of herd immunity in such a way, which has the potential to significantly advance research in this direction. By introducing increasing numbers of ‘vaccinated’ CAVs in traffic fleets, additional levels of safety are given to ‘unvaccinated’ HDVs, who benefit from this form of herd immunity. The CAVs are hypothesized to have a much higher level of individual safety but can also enhance the safety of HDVs, which is where the analogy with immunity comes in. This paper describes the involved mechanisms and sets out this new line of research that aims to assess and predict the potential of Automated Driving Systems (ADS) to achieve traffic safety through herd immunity. The main contribution of the paper lies with the introduction of the concept for traffic safety with an approach that explicitly considers the spread of risk and the presence of tipping points through making the direct connection with the concept of herd immunity. In doing this, it sets out a line of research to achieve the determination of tipping points for traffic safety with CAVs under various conditions. Note that throughout we define Connected Automated Vehicles (CAV) in this paper as a generic category of vehicles that make use of some level of either connected and/or automated technology. We will define and explicitly mention specific types of CAVs when applicable. In the rest of the introduction, we highlight some of the characteristics and potential impacts of the introduction of CAVs. In Section 2, the mechanism behind herd immunity is described both for their origins in virology and the foreseen mechanism for traffic. Thereafter in Section 3, a demonstrative proof of concept is given of these mechanisms, which we discuss in Section 4, in which the main open and remaining research directions and questions are also given.
Figure 1. Example of CAVs protecting HDVs, a) the prior situation b) accident situation with HDVs, c) accident avoided situation with CAVs.
Dawn of vehicle automation in context of safety
Since the start of the 21st century, there has been a steady increase in the development and implementation of automated driving system (ADS) technology, which followed the uptake of advanced driver assistance systems (ADAS) (Lindgren and Chen Citation2006; Ziebinski et al. Citation2017). There are many claims that ADS has the potential to change the way we drive for the better, by improving traffic flow (Hartmann et al. Citation2017; Liu et al. Citation2017; Ziebinski et al. Citation2017), improving traffic safety (Farah and Koutsopoulos Citation2014; Liu et al. Citation2017; Ziebinski et al. Citation2017) and general driving comfort and pleasure (Hasenjäger and Wersing Citation2017; Holzinger et al. Citation2020), as well as fuel efficiency (Tunnell et al. Citation2018). And while this may indeed eventually be the case, the actual situation in the coming decades will be much more nuanced due to low levels of CAVs on roads in mixed traffic and teething problems related to the broadening introduction of CAVs (Sohrabi et al. Citation2021). Furthermore, many of the benefits that are mentioned are expected to only be felt in any significant way with a sufficient level of vehicle connectivity (Makridis et al. Citation2018; Shladover, Su, and Lu Citation2012; Shladover Citation2009). We will briefly touch upon four important aspects that will influence the impacts of CAV introduction in the context of safety: system maturity and diversity; level of connectivity; driver familiarity and ability; and human factors in mixed traffic.
System maturity and diversity
Many current ADS in CAVs are low-level automated systems that control some aspects of driving, e.g. car following, such as with ACC, or lane keeping or changing, with the human driver still required to monitor the system at the very least. These vehicles are intentionally setup to drive in a conservative way, avoiding potential risks and not interacting with human drivers in ways that could lead to conflicts (Koopman and Wagner Citation2016). This often results in current CAVs leaving larger gaps to preceding vehicles and having difficulties lane changing, especially in busier traffic. This obviously leads to a degradation of traffic flow and capacity (Calvert, Schakel, and van Lint Citation2017; Chen et al. Citation2017). A further often overlooked characteristic of CAVs is that while individually they may drive more homogenously, between different CAVs there can be a significant level of heterogeneity. There are many different levels of CAV capability and systems, with each manufacturer working slightly differently, even for identical technologies, and even for the same technology in the same vehicle, individual vehicle owners can set up their systems differently (Koopman and Wagner Citation2016). This has the potential to also significantly influence traffic performance, although very little research has been performed on this to date, with much research assuming homogeneity amongst CAVs, especially in traffic simulation studies.
Level of connectivity
Many of the benefits of CAVs will only really emerge with the introduction of connectivity to vehicles connectivity (Makridis et al. Citation2018; Shladover, Su, and Lu Citation2012; Shladover Citation2009). This may be vehicle to vehicle (V2V) communication that allows vehicles to communicate their driving states and information to each other, or this could be information from road-side units (I2V) conveying information about infrastructure (e.g. speed limits, potential dangers, etc.) and traffic states further downstream (Jandial et al. Citation2019; Mamduhi et al. Citation2020). The greatest benefits in traffic stem from near instantaneous information generation that allows a CAV to react much faster as it does not need to use its perception sensors and processing power to detect and analyze a situation, but is fed this information directly from other vehicles and can allow vehicles to anticipate downstream traffic conditions. Analysis in literature has found that in theory, connectivity has the potential to increase traffic performance by up to 90% compared to similar unconnected CAVs (Chang et al. Citation2020; Liu et al. Citation2018). There is also strong evidence that traffic safety is improved through connectivity (Uhlemann Citation2015; Rahman and Abdel-Aty Citation2018; Olia et al. Citation2016; Virdi et al. Citation2019), however quantification of these benefits remains a challenge (Ehlers et al. Citation2017; Kulmala Citation2010).
Driver familiarity and ability
Even with CAVs, the role and ability of a human driver remains important, especially for non-fully automated CAVs (Kulmala Citation2010). Drivers have almost exclusively not been trained or experienced ADS during their driver training (Oviedo-Trespalacios, Tichon, and Briant Citation2021). This means that drivers are learning to use ADAS and ADS on the fly, which in itself brings about potential threats. A more concerning danger involves the use of systems that limit a drivers operational involvement in the driving tasks and leaves them with merely a monitoring role. It has been extensively shown and proven that human drivers are not cognitively capable to perform such a role for a long period of time to a high standard (Louw et al. Citation2015a; Parasuraman, Mouloua, and Molloy Citation1996; Wickens et al. Citation2015). Drivers will often become fatigued or distracted as a result of a lack of cognitive stimulus and do not react appropriately or timely when required to (Louw et al. Citation2015b; Young, Salmon, and Cornelissen Citation2013; Regan, Lee, and Young Citation2008). Mecacci and de Sio (Citation2019) go as far as to state that there is a lack of Meaningful Human Control for such cases (Heikoop et al. Citation2019; Mecacci and de Sio Citation2019), despite the driver being assigned these critical tasks. This has already led to a number of high profile serious and fatal accidents with CAVs in which these processes have played a role (Calvert et al. Citation2020; Favarò et al. Citation2017; Li et al. Citation2017).
Human factors in mixed traffic
Finally, even with increasing uptake of CAVs in traffic, traffic composition in the coming decades and for the foreseeable future will be mixed HDV-CAV traffic. This entails that CAVs will need to interact with human drivers and vice versa (Kulmala Citation2010; Virdi et al. Citation2019). With human drivers inherently having a more heterogeneous driving style and being potentially more inclined to errors, this throws up a number of important consequences (Kyriakidis et al. Citation2019; Seppelt and Victor Citation2016; Lu et al. Citation2016). Some challenges include CAVs needing to anticipate and act accordingly to HDV, which can also involve many human behavioral interactions that may seem logical to humans, but can be difficult to interpret by CAVs. On the other hand, humans will need to interact appropriately with CAVs, with trust being a potential issue, while also human driving capability being another. For example, if a CAV correctly performs a maneuver to ensure safety, such as an emergency stop or swerve, it has already been demonstrated that human drivers are not always able to respond at the same speed as a CAV resulting in a collision. Mixed traffic will be complex and yield many challenges, but the presence of CAVs in mixed traffic may also yield opportunities to improve traffic performance and safety compared to CAV-less traffic, and this is exactly what the focus of this paper considers in regard to the potential of herd immunity to offer an increased positive effect to both CAV and HDV in such a mixed vehicle environment.
Potential safety improvements of CAVs
Currently, no clear estimates exist in regard to the potential future level of improvement of any level of automated vehicles (Sohrabi et al. Citation2021). A main reason for this is a lack of sufficient empirical evidence and insufficiently accurate simulation models. Many researchers have aimed to consider the number of current accidents that can be avoided with CAVs. Some blindly focus on the 90%+ mark as the number of accidents that involve human error. However, it is unrealistic to expect all these accidents to be avoided. Wang et al. (Citation2020) did find from detailed and expansive empirical that 40–50% of accidents could be prevented with CAV systems. Other research has focussed on the number of miles required to demonstrate that automated vehicles are safer than human driven vehicles (Favarò et al. Citation2017; Kalra and Paddock Citation2016). Kalra and Paddock (Citation2016) state for example that many tens of millions of miles would be required to prove accident reliability, and even hundreds of millions and billions of miles for injury rate and fatality rate reliability of automated vehicle safety. They do readily admit that obtaining this would take many years and hence it is not currently feasible to collect such information empirically. Therefore, it is currently not possible for us to give expected safety improvement expectations, either for CAVs in general or per SAE level, as much more empirical evidence and investigative research is required.
Relation to herd immunity
In regard to herd immunity, we have a number of questions and hypotheses that require attention. The first one considers what the generic mechanisms of herd immunity for traffic safety are, and, together with demonstrating the existence of the herd immunity phenomenon, is the main focus on this paper. A second refers to the hypothesis that there are ‘tipping points’ at which sufficient penetration of CAVs will lead to enhanced traffic safety, and what these tipping points are for a variety of different CAVs technologies, infrastructure configurations, traffic states, and so on. In the remainder of this paper, we will focus on addressing the first question, while giving a proof of concept for it and for the hypothesis posed in the second, which allows the second question in regard to tipping points to be considered in later research. Specifically, this paper aims to address the issue of understanding and describing secondary safety from interactions between CAVs and HDVs. In a practical sense, this can give theoretical evidence for traffic system safety and the further development of technical systems that can aid its achievement.
As the primary focus of the paper is on the development and demonstration of Herd Immunity for Traffic Safety (HITS), we include a number constraints in this paper and for the concept itself. The concept of HITS is applicable for any road type, infrastructure environment, and class of road users in which a mix of automated vehicles and human controlled vehicles or humans are present. This includes mixed CAV-HDV traffic on motorways, urban traffic environments with intersections and even the interactions with pedestrians and other active modes, such as cyclists. In this paper, we choose to constrain examples and analysis to the simpler case of unidirectional motorway traffic on homogenous corridors, while considering commonly occurring circumstances. This decision allows the principles of HITS to be demonstrated in a clear and coherent way, while also assuring the analysis of a realistic and highly probably scenarios, without drifting into potential edge cases. It also retains focus on those areas that are required to demonstrate HITS, for example tackling the influence and effects of human factors is so vast that it deserves to be considered in further dedicated research. Furthermore, in this paper, we assume that the technical systems controlling CAVs all work as designed and that technical malfunction does not occur. Despite this scoping, many other scenarios are equally relevant and should be considered at a later stage, therefore they are considered in the discussions section for later research.
Herd immunity for traffic safety
The principle of herd immunity
‘Herd immunity’, sometimes also known as ‘population immunity’, is the indirect protection from an infectious disease that happens when a population is immune either through vaccination or immunity developed through previous infection (WHO Citation2020). With viruses, immunity occurs in one of three ways: either a person is vaccine themselves, or they have already developed immunity through previously being infected, or through detachment of being in the vicinity of someone who is infected and thus cannot or have a reduced chance of becoming infected.
In virology, a commonly applied type of epidemic model is the Susceptible-Infectious-Recovered (SIR) model (Hethcote Citation2000; Pastor-Satorras et al. Citation2015)]. A SIR model describes a single outbreak of a disease where each individual at a certain time is assumed to be in one of the three different disease stages: Susceptible (S), i.e. healthy, but vulnerable for the infection, Infected (I) and Recovered (R), i.e. the individual either recovers from the disease or dies from it. Individuals are assumed to come into contact with each other with certain probabilities and probabilities of transmission of infection for those who are infectious. Recovered individuals are commonly assumed to not be susceptible to infection, although there are variations of the models that may assume this as a possibility but with a significantly lower probably that may also change in time. In the case of immunity due to vaccination, an individual can transfer from the S category to the R category without having to pass through the I category, which reduces the overall number of infections, but more importantly reduces the probabilities of infections spreading to other susceptible individuals.
A key performance indicator used to track the spread of a disease is the R-number. The R-number is the replication number that refers to how many people become infected on average from a single infected person. If R is 1, then each person that is infected will infect one other person. Hence, if R is higher than 1, one person will on average infected more than one other person, which will increasingly result in higher levels of infection. Therefore, the aim is to obtain an R-number below 1. In the case that a small number of people are vaccinated, the effect on the spread of a virus is limited (see ). At a certain point, when sufficient people are vaccinated, and this does not need to be everyone, near-complete immunity can be achieved (see ), and a virus will cease to spread and have a low R-number.
The comparison to Herd immunity applied to CAVs can have a similar effect on traffic safety as vaccination has on the spread of a virus. Connected vehicles (CV) have the ability to react faster to changes in their environment compared to non-connected traffic by receiving near instant information from and about other vehicles. In the case of a CAV with some level of automation, their reaction is much faster as the influence of human reaction times is not present if the CAV is driving in automated mode. These CAVs therefore have a form of immunity through vaccination (i.e. connectivity) that allows them to react quickly and avoid potential dangerous situations and reduce their risk and chances of being involved in an accident (which would equate to becoming infected in the virus example). With increasing penetration of vehicle connectivity in a traffic flow, it is hypothesized that secondary levels of immunity also occur due to CAVs not only preventing themselves from crashing but also being able to ‘absorb’ driving errors or critical situations from human driven vehicles and in turn offering these other vehicles immunity: herd immunity! Later in this section, we give an example of this, which can also be viewed in .
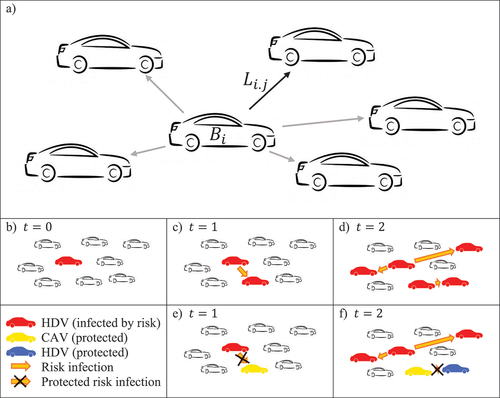
Figure 2. Demonstration of risk transmission and herd immunity in traffic.a) interaction between vehicles, b-d) transmission of risk with only HDVs, e-f) transmission of risk in mixed traffic showing the benefits of herd immunity
At a certain penetration rate of CAVs in a traffic flow, we would expect an increase in Herd Immunity for Traffic Safety (HITS). But at which penetration rate, under which circumstances, on what type of road section, with what type of connectivity, which level of automation, what involvement of human driver involvement, etcetera is currently unknown and is the focus of the proposed research. Does the hypothesis indeed carry over from virology to traffic safety and how affective can it be? The potential of HITS can have a major impact on traffic safety and in turn influence policy to enable, develop, facilitate, and increase the presence of CVs and CAVs on roads. If the effectiveness of HITS is high, then achieving it to prevent accidents and save lives is important. But to be able to implement, one does not only need to know if the hypothesis is true but also the conditions that apply to achieving HITS. Traffic and vehicle technology, as well as road conditions, can be very heterogeneous, meaning that many variables can influence the outcome of such results to achieve different effectiveness of HITS. In the proposed research, we therefore focus heavily on identifying these variables and attempting to determine potential tipping points for which increased traffic safety can be achieved with HITS through the use of vehicle connectivity.
Mechanism of herd immunity for traffic safety
Obviously, the spread of viruses is not the same as risk in traffic. While we take some of the main principles from herd immunity and apply them to traffic safety, many of the mathematical descriptions that exist for the spread of viruses do not hold for risk in traffic. For example, one difference is that the origin of risk can occur seemingly at random in traffic flow, often caused by human inattention or error, while with viruses inter-human transmission will almost exclusively be at the core of virus transmission. Nevertheless, the main principle still do hold and are set out in the following text.
We describe the application to CAVs based on the commonly applied SIR-model that was introduced in the previous paragraph. We consider an unsafe interaction to be an infection and consider an initial outbreak of an infection to be a single original unsafe risk event that can originate internally from a driver, e.g. driver error, or externally, e.g. tyre blow-out (Ehlers et al. Citation2017). Following generally accepted safety assessment approaches (Ehlers et al. Citation2017; Kulmala Citation2010; Sohrabi et al. Citation2021), we use accident risk as a unit of exposure to unsafety (Ehlers et al. Citation2017). We consider a set of individual vehicles, in which each individual
at any discrete time
is in one of three states: Susceptible to risk (
), Infected by risk (
), Recovered or immune from risk (
). Therefore, the risk state of any individual vehicle
at time
is denoted by:
where ,
,
are the fractions of susceptible risk, infected risk and recovered/immune risk individuals, respectively, which all satisfy the law of conservation:
The discrete-time SIR model defines the evolution of a viral state (Prasse and Van Mieghem Citation2020; Youssef and Scoglio Citation2011). In a similar way, we consider the evolution of a risk state amongst individual vehicles. Within a fleet of vehicles in traffic, an individual vehicle can become ‘infected by risk’ due to an initial risk event. For example, a strong braking maneuver or unexpected lane change could be such a risk event. This risk can spread to other surrounding vehicles through interactions subject to a certain probability. We define a matrix that contains the aggregated probabilities of each vehicle being able to pass risk on to another vehicle in a single traffic environment:
Furthermore, the probability of risk being passed on from one vehicle to another is also governed by the proximity of each vehicle to each other, both in a longitudinal and lateral sense. We define this probability in a matrix , which indicates the probability of risk infection due to location proximity to other vehicles:
Combining the infection risk matrix B from EquationEq.(3)(3)
(3) and the proximity matrix L from EquationEq.(4
(4)
(4) ), gives the total risk of that vehicle
being involved in an accident
for each individual
and each time instance
:
By considering a single risk event in traffic, we consider the elimination of risk as the end of a risk event. Other things to note from this theoretical description is that the risk state of a HDV is subject to variation amongst the states,, while a CAV in automation mode will remain in state R as a ‘vaccinated’ vehicle against risk. Obviously if we consider different types of CAVs and even HDVs, then different sub-categories would exist within the three different states. In practical terms, the probability of risk transmission attributed through their state
is a direct consequence of a vehicle type’s ability to avoid risk when faced with an unsafe situation. In practice, this may depend on aspects such as the reaction time, the level and ability of anticipation, and common gap-times of the vehicles, and probably a number of other variables to a lesser extent. The described mechanism is depicted in to offer further clarity. In each vehicle is represented by an oval, each with its own
, depending on the type of vehicle, and multiple
to each other vehicle, as seen in . In , the spread of risk form an initial HDV at
is shown. In , the same set up is shown, however with the presence of a single CAV that is able to block a transmission of risk infection at
, which in turn results in the prevention of an additional infection of risk in
, where the ‘immune’ HDV is indicated in blue in . This additional protection from risk is the herd immunity multiplier.
Using the presented theoretical description to show how risk can spread between different types of vehicles, we demonstrate the general principles of the herd immunity mechanism. For this, we assume that there are vehicles on an arbitrary section of road that can interact with each other with a probability of
that each vehicle can interact with any other vehicle during a time-step (this has been intentionally kept uniform here, although in practice, certain vehicles will be in closer proximity than other at different points in time). Each vehicle also has a risk of ‘infection’ based on the vehicle time: HDV or CAV, with HDV at 5% and CAV at
depending on the considered scenario. ‘Infection’ here equates to passing on risk from an initial incident. This initial incident is applied at
by denoting a single HDV as infected. In each time step t, this risk can spread through the vehicle population to other vehicles.
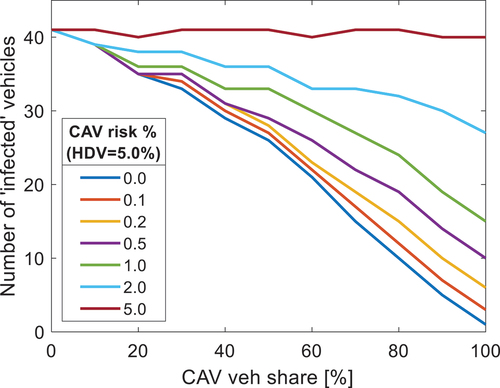
shows the final number of ‘infected’ vehicles, i.e. that risk has passed to, at the end of t = 100 for different percentages of CAV’s and for different levels of CAV transmission probability rates. If we first observe the line for CAV transmission rate of 0.0%, then we observe that for 0% penetration of CAVs that 41 vehicles have become infected by risk at the end of the scenario. At 50% CAV penetration, this has already reduced to 26 vehicles, while if the entire vehicle fleet are CAVs, then no other vehicle, other than the originally infected vehicle, are infected, which makes sense as we have set the transmission probability for CAVs to 0%. The main point to highlight here, is not the reduction in risk infection, but rather that the trend is non-linear. The function exponentially decreases with each additional vehicle that is a CAV rather than HDV, which indicates that there is multiplier effect in regard to the availability of CAVs to decrease risk with higher levels of penetration.
Figure 3. Final number of infected vehicles at the end of 100 time steps, average over seeded runs.
In the following section, we give a demonstrative example for a specific road corridor and traffic example that more explicitly considers the physical and spatiotemporal aspects of traffic beyond the mathematical exercise given in this section that has shown the general principles if the herd immunity mechanism.
While not explicitly including it in the above mechanism for traffic safety, we do wish to highlight the relevance of the R-number as a key component of the herd immunity process. In virology, the number indicates the increasing (R > 1) or decreasing (R < 1) spread of a disease. Logically, for the above example, the R-number in HITS represents the spread of risk in traffic, which can increase (R > 1) or can decrease (R < 1). An increasing spread of risk means that risk is passed on to an increasing number of vehicles in a vehicle fleet, such that these driver-vehicle combinations need to react to the risk and take evasive actions. In some cases, the risk may be so high that an accident could occur. In practice, such situations will often occur in dense traffic, which also aligns with the virus comparison, as having many people in close proximity would also increase the R-number. Pile-up accidents involving many vehicles are clear example of such a situation in which the R-number has been above 1 for too long and in which drivers have not been able to compensate sufficiently to mitigate risk. In other situations, drivers may be able to mitigate risk and avoid an accident, nevertheless risk has still spread and has been above R > 1 for a certain time. As also with viruses, it is unsustainable to endlessly have R > 1 and R < 1 will result after a set time. For viruses this is often a longer period, while for HITS and risk, this time-scale may be in the region of seconds up to a minute. The ability of drivers and vehicle to absorb risk plays an important role in flipping to a situation in which the R-number drops below 1. As we will see in the demonstrative cases in the following section, interventions from CAVs can further improve the ability of traffic to absorb risk and can mitigate many situations in which risk may have spread further compared to purely HDV traffic.
Demonstrative case
Case description
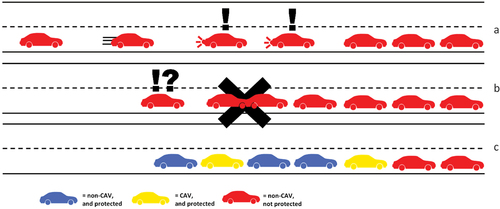
While the example at the end of the previous section shows how risk can spread in theory, vehicles adhere to vehicle dynamics in a spatiotemporal physical domain that is not explicitly considered in that example. We therefore also offer a demonstrative case in which we explicitly consider the physical interaction of vehicles on a road and how risk is transferred in different starting scenario to demonstrate the potential of Herd Immunity for Traffic Safety. In this case study, graphically shown in , we consider a situation () in which vehicles approach a stationary queue at speed and with an imperfect level of attention. This is a common occurrence on roads, and often leads to rear end collisions, which make up one of the most frequently observed accident types (Itasca Citation2015; NHTSA Citation2003; Watanabe and Ito Citation2007) with the causation often due to inappropriately high speeds and driver inattention (Louw et al. Citation2015a). shows the situation prior to an accident, with the resulting conflict demonstrated in . In we demonstratively show an alternative outcome with a different traffic compositions, including the presence of CAVs. In the case that just two of the five considered vehicle are CAVs, such a situation can be avoided. Assume the following, the front CAV has already stopped and is stationary. It sends out a message to surrounding vehicles that there is stationary traffic up ahead. The second CAV receives this message and starts to reduce speed before the stationary traffic is evident for the driver. By reducing its speed (and not emergency braking), following vehicles also reduce their speeds and potential incident is avoided. In this example, we see that human error in HDVs is ‘absorbed’ and the HDVs are given a greater degree of safety due to the presence and vicinity of CVs and CAVs in the traffic population.
Figure 4. Case depiction: a) the prior situation b) accident situation with HDVs, c) accident avoided situation with CAVs.
Case setup and scenarios
The above described case is applied in a simple MATLAB configuration of a road corridor using a vehicle-driver model to describe the vehicle dynamics. For this, we apply the Intelligent Driver Model plus (IDM+) (Schakel, Van Arem, and Netten Citation2010) in a configuration previously applied to model driver distraction using the IDM+ (van Lint and Calvert Citation2018) through a delayed response to the leading vehicle and an increase of reaction times, both which are present in cases of driver inattention. For more details of the applied human driver-vehicle dynamics, see Calvert, van Arem, and van Lint (Citation2020) and van Lint and Calvert (Citation2018). shows the trajectories of the vehicles for an arbitrary scenario (20% CAV penetration rate) in which the sudden braking maneuver is clearly visible as well as the CAVs in red. Note that the distribution of the CAVs among HDVs is randomized. The black box in indicates a location where herd immunity is achieved in line with the theoretical example in the previous section. At this point, a large number of HDV’s have performing increasingly strong braking maneuvers, which if unchecked would lead to an incident. Thereafter, a few CAVs are present in the traffic that allows the decreasing gaps and TTC’s trend to be broken and the risk to be absorbed. For
Figure 5. Depiction of vehicle trajectories for the case in . Red denotes a CAV. The black box denotes a place where herd-immunity improves safety.
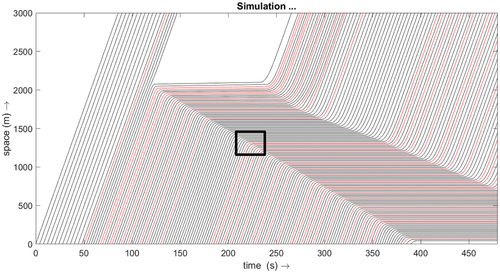
Vehicles are let into the corridor with a uniform flow of 900 veh/hour increasing to 1500 veh/hour after an initial warm-up time, and all with a desired speed of 35 ms−1. At time t = 120 s, a stationary queue is created through a manual adjustment of a single vehicle’s desired speed to 0 ms−1, which forces it to perform an emergency stop. The vehicle starts to move again at t = 240 s. This approach creates the sudden standing queue as seen in . The level of awareness and perception of each vehicle is identical and maintained throughout. A level of inattention is also given to the HDVs as an extra response reaction time . CAVs maintain a perfect level perception and reaction time with a
. Scenarios using different levels of CAV penetration in the vehicle fleet are considered for:
. As well as varying the penetration rate, two different levels of HDV driver inattention are considered:
to allow different curves to be analyzed. Each combination of scenarios (penetration rate and inattention value), 30 seeded runs are performed in which the distribution of the CAV amongst the HDV is changed. The same seeds, and therefore CAV distributions, are applied for all scenarios identically, which means that the same distribution of CAVs is present for the 10% case, as the 20%, as the 30% and so on.
The number of accidents, defined as a vehicle physically encroaching another vehicle in the simulation, and the time of the first accident are recorded as a proxy for the level of safety. Both results are the averaged over all seeds to limit the stochastic influence of the CAV distribution. Also note that the case is calibrated with higher human levels of inattention in a way that accidents will occur more readily than in reality to demonstrate the improvement in critical conflicts using CAVs and the effect of the herd immunity effect.Footnote1
A further analysis is performed for the mean critical time-to-collision (TTC) times for all scenarios, in which a distinction is made between vehicle types (CAV and HDV). For this, the critical (lowest) TTC value from all vehicles of the same vehicle type is recorded per seed, with the mean of all seeds per penetration scenario calculated, indicating how close vehicles in that scenario became to being involved in an accident.
Results
The average time of the first accident after the induced disruption per scenario is shown in for each penetration rate, as well as the total percentage of scenarios in which no incident occurred in the bar plot. Furthermore, a distinction is made between the two different levels of inattention ( in blue and
in red). For the penetration rates 0–50%, each seeded run resulted eventually in an accident, while for a penetration rate of 100% CAVs, no accidents occurred. It should also be noted that for a lower number of accidents with the higher CAV penetration rates that the time value is unfairly influenced due to deviating observations for the time of an accident and will start to deviate from the expected trend. This effect is counteracted through the use of the two inattention scenarios that allow the trend to be extended, such as for
, which has the same number of accidents per up to a penetration rate of 90%.
Figure 6. Results of the demonstrative case depicted in .
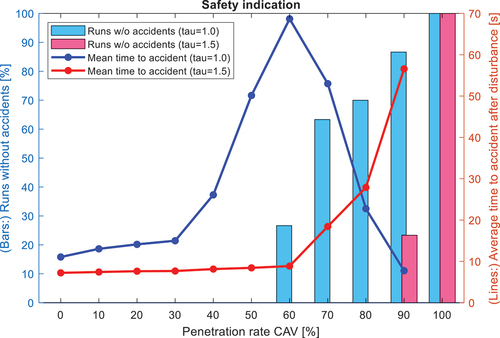
Due to the setup of the case, the real value of the results is in the relative differences between the scenario rather than the absolute values. allows us to draw on two distinct observations. The first is that with higher CAV penetration rates fewer accidents occur, which may be expected as there is an objectively lower level of inattention from human drivers, which is known to exist in practice and is the focus of this case. We also logically see that for a higher value of , equating to a greater degree of inattention that a higher number of accidents occur, even for higher CAV penetration rates compared to the lower level of inattention of
. The second observation is of more importance for the proof of herd immunity for traffic safety and lies in the non-linear relationship between the average time of the first accident and the penetration rate. For this, we only focus on the scenarios in which all seeded runs ended in an accident for the sake of fair comparison. For lower penetration rates, we can observe that up to a penetration rate of 30% for
and up to 60% for
, the delay in the average time of the first accident is marginal. For higher penetration rates thereafter, the increase in average time increases exponentially. These values of 30% and 60%, respectively, indicate the so-called tipping points at which a substantial decrease in risk is observed from the herd immunity effect that was described in the previous sections, and hence offers proof of the existence of the effect and a clear demonstration that HITS can have a positive effect on traffic safety. This improved safety goes beyond CAVs themselves, as they increasingly allow human error to be absorbed with the higher levels of CAV penetration.
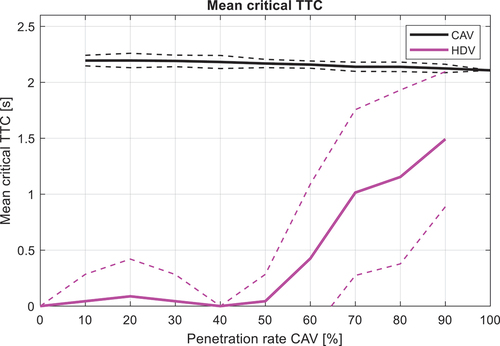
The mean critical TTC values are shown per CAV penetration scenario (for ) in . For HDV, the lower penetration rates up to 50% CAV were dominated by HDV collisions and hence the critical TTC is low, as when an accident occurs, a value of 0 is assigned. For 50–90%, the trend is increasing as the HDV gained additional safety from the presence of the CAVs in the simulation. The results show the level of criticality but not the trend of all vehicles, as the lowest critical values are considered and not the mean. Considering the mean proved problematic, as at the time of an accident a simulation is stopped, which means that each seeded run would unfairly compare different number of vehicles which would skew the results rending them invalid. Furthermore, the standard deviation of the critical TTC values are also shown to reflect the variation in the conflict severity.
Figure 7. Mean critical TTC and standard deviation for the demonstrative case depicted in Figure 3.
Discussion and research outlook
Developing HITS and tipping points
The concept of Herd Immunity for Traffic Safety (HITS) is a direct consequence of the knock-on-effect of absorbed risk by CAVs that prevent or reduce the transmission of risk and in doing so lead to an overall reduction in risk and unsafety well beyond the safety that the CAVs themselves experience. This principle has been demonstrated in this paper with the non-linear relationship in risk proportional to the CAV penetration rate as evidence of this. An important aspect of HITS is the hypothesized existence of so-called tipping points at which sufficient levels of CAV penetration are present and at which a substantial increase in safety levels can be expected. These tipping points will be at the tangent of the non-linear function between risk and CAV penetration rate and may be considered as a future target for CAV penetration to vastly improve road traffic safety. To a certain extent, the tipping points can already be seen from the cases shown in this paper, however this was merely given a proof of concept. To find the tipping points that may be expected in practice, one needs to ensure that simulations, or even real-life pilots, closely replicate as many vehicle dynamics and vehicle and driver characteristics as possible. Tipping points for HITS are not likely to be a single value but rather will be situation specific. This is due to the large variety of different accident types, driver behavioral characteristics and different types and level of vehicle connectivity and automation. Each combination of the above has the potential to lead to a different tipping point. This still requires much research and thus this is given as an important recommendation for future research. Before that can be generically achieved, some further developments are required on the modeling side. Therefore, while HITS has been shown here in theory, demonstrating the same in simulation and in more elaborate cases will serve to strengthen the proposition and allow more deliberate design of vehicles and infrastructure to improve traffic safety in the future. We also wish to highlight that we chose to make use of a car-following model (IDM+) adjusted with the HITS mechanism to demonstrate the principle. For this approach, we did not explicitly consider vehicle tactical maneuvering as a variable. Other modeling approaches may also be worth considering in the context of HITS to allow a more fluent tactical decision-making process. One example is the use of game theory to model decision making in vehicle interactions. An increasing body of research is present considering the interactions between CAVs and HDVs using game theory (Albaba and Yildiz Citation2021; Di and Shi Citation2021). This has been used for, amongst others, safe vehicle spacing and lane changing (Talebpour, Mahmassani, and Hamdar Citation2015; Yoo and Langari Citation2020), efficiency and safety trade-off (Huang et al. Citation2020; Wang et al. Citation2015), and collision avoidance (Albaba and Yildiz Citation2021). In the context of human error and risk absorption, such an approach may be worth considering as a valuable extension to also explicitly model the decision-making process of both HDVs and CAVs.
A number of assumptions and simplifications that were made in this research will need to be readdressed. Examples of assumptions that were made are with regard to heterogeneity of driver-vehicle dynamics in HDVs, homogeneity of CAV technology levels and dynamics, and limited to no risk transmission of CAVs. Traffic is heterogeneous and this in itself has important impacts on vehicle dynamics and safety. Incorporating real variation amongst HDV is imperative to allow the real risk and dynamics to be properly included. Even the inclusion of Gaussian noise to create heterogeneity in driving behavior falls short of what is required. CAVs can also expected to be heterogeneous in regard to the types of connected and automated technology and AV-levels they harbor. Moreover, even two identical pieces of technology, but from two different car manufacturers, can behave in different ways. And that’s even before one starts to consider the personal setup by driver choice that may exist, such as desired speed or following distance settings. Furthermore, different systems and levels of automation will also require different levels of human involvement. This in itself, connected to human factors elements, also throws up additional variation that should be considered in future research. Finally, we assumed that CAVs have an extremely low level of risk transmission. On the face of it, this is a valid assumption, however one that still requires solid evidence and distinction between circumstances. It is highly feasible that CAVs will avoid many driver-error related conflicts, however there may be other aspects of CAV driving that could lead to higher unsafety and risk under specific circumstances. Being able to derive and apply an accurate estimation of their level of risk transmission and under the correct circumstances is complex but can also allow a greatly improved and accurate estimate of real HITS to be made with accurate tipping point analysis.
Traffic safety assessment indictors
Risk is a term that considers the probability of an unsafe outcome. A major challenge with probability-related concepts is that for small probabilities, large sets of data are required for potentially unknown or difficult to prove outcomes. The use of accidents as a proxy for risk is well accepted and used in this paper. However, to do this, we included higher levels of risk than would normally be the case in practice. Analysis of risk on complete road sections with multiple vehicles over a longer time span is challenging premise that is not easily captured with many existing road traffic safety metrics. In recent years, increased research has been performed in the area of safety fields as a metric that is capable of capturing risk as a probability in multiple dimensions in spatiotemporal traffic (Mullakkal-Babu et al. Citation2020; Wang, Wu, and Li Citation2015). We argue that in this group of metrics lies an improved ability to capture objective risk and safety in a way that would be relevant and appropriate for applications with the concept of HITS. The development and use of metrics, such as safety fields, does not only allow risk to be determined in a spatiotemporal field but also allows the degree of potential conflict severity to be determined. This entails also considering the consequence of various risk values as well as the probability of occurrence. Further research is required to further mature the current state of the art in regard to safety fields in road traffic safety analysis, such that a generally applicable and valid description thereof can be applied in future research on HITS.
Scope and context of HITS
While the focus in this paper has been on presenting and demonstrating the concept of HITS using clear and straightforward examples, the scope and context of the concept reaches much further. We foresee the HITS concept to be applicable for traffic safety analysis wherever CAVs and human interact, which includes on motorways, junctions, urban roads with intersections and in shared spaces. This also includes interactions with HDV, bicycles, and pedestrians, as these modes of transport can also benefit from the secondary safety that CAVs can offer through the absorption of risk in traffic operations. Also other scenarios can be considered for the effectiveness of the HITS concept in traffic. This includes different traffic circumstances, such as in dense traffic, merging traffic, crossing traffic, or in case of accidents for the prevention of secondary accident. Also other environmental circumstances, such as adverse weather considers, are valid cases I which HITS may be applicable, and maybe moreso than under ideal circumstances. For example, if we consider a case of dense mist, we would expect a CAV to still be able to detect its surroundings, while humans in HDVs would be more suspect to error (which has been extensively proven in literature). An error from a HDV could be equally absorbed by the CAVs to provide a greater degree of safety to other vehicles.
In this research, it was assumed that CAVs would not malfunction, however even in the case of technical malfunction by a CAV, an analysis can be performed to what extent traffic safety is affected. In such case, we hypothesize that the tipping point would shift toward a higher penetration rate of CAVs at which point it would still result in improved safety. For example, a malfunctioning CAV may be seen as a vehicle that is performing an erroneous action, just as we have seen in the other examples in the paper where humans were at fault. In a similar way, other correctly functioning CAVs can still offer secondary protection to other vehicles by performing evasive maneuvers. A main difference is that a technical malfunction by a CAV may lead to other types of events, however there is no reason to believe that these events cannot also be addressed by other CAVs. This is a topic that will be researcher further in the HITS research program.
A final issue not considered in this study is the economic balance of CAV implementation costs versus the benefits. Such an analysis could be executed in a Cost Benefit Analysis to indicate the economic value of CAV implementation when HITS is considered. There could be an argument that CAVs will be present in the future in any case, however if a positive CBA case would occur, this may give way to increased enabling actions from government and regulators to hasted the implementation of CAVs and facilitate their introduction. This topic is given as one for further research.
Conclusions
The concept of Herd Immunity for Traffic Safety (HITS) builds on years of experience and research in both medical domains as well engineering domains and offers a narrative and focus to improve road traffic safety with the introduction of Connected and/or Automated Vehicles (CAV) in the future. In this paper, we have presented the concept derived from virology with a strong and valid application to traffic safety. The underlying mechanisms of HITS have been derived and described with a first effort to also mathematically capture the mechanism, which is demonstrated in a generic abstract case and also in a further specific spatiotemporal traffic scenario case. In both cases, it was shown that traffic safety increases nonlinearly as the CAV penetration rate grows and hence an increased level of traffic safety is gained beyond just the safety of CAVs themselves. This was performed through analysis of the transmission of risk between vehicles. This additional safety is the result of non-CAVs gaining protection (‘immunity’) through the absorption of risk by CAVs and therefore resulting in increased reduction of risk transmission and therefore increased safety. As the first paper to present the concept, there are also recommendations that are made. These focus on expansion of the concept to include driver-vehicle and CAV heterogeneity, which in itself is difficult to derive never mind apply. Also further efforts to obtain improved metrics of traffic safety for spatiotemporal and multi-vehicle traffic are recommended with a strong avocation for the application of traffic safety fields over accident detection.
Disclosure statement
No potential conflict of interest was reported by the author(s).
Notes
1. It would require millions of runs to prove the same principle if a more realistic perception error would be applied.
References
- Albaba, B. M., and Y. Yildiz. 2021. “Driver Modeling through Deep Reinforcement Learning and Behavioral Game Theory,” IEEE Transactions on Control Systems Technology.
- Arvin, R., A. J. Khattak, M. Kamrani, and J. Rio-Torres. 2020. “Safety Evaluation of Connected and Automated Vehicles in Mixed Traffic with Conventional Vehicles at Intersections.” Journal of Intelligent Transportation Systems 25 (2): 170–187. doi:10.1080/15472450.2020.1834392.
- Calvert, S. C., G. Mecacci, B. van Arem, F. Santoni de Sio, D. D. Heikoop, and M. Hagenzieker. 2020. “Gaps in the Control of Automated Vehicles on Roads,” IEEE Intelligent Transportation Systems Magazine.
- Calvert, S. C., W. J. Schakel, and J. W. C. van Lint. 2017. “Will Automated Vehicles Negatively Impact Traffic Flow?” Journal of Advanced Transportation 17.
- Calvert, S. C., B. van Arem, and J. W. C. van Lint. 2020. “A Generic Multi-level Framework for Microscopic Traffic Simulation with Automated Vehicles in Mixed Traffic.” Transportation Research Part C: Emerging Technologies 110: 291–311. doi:10.1016/j.trc.2019.11.019.
- Chang, X., H. Li, J. Rong, X. Zhao, and A. Li. 2020. “Analysis on Traffic Stability and Capacity for Mixed Traffic Flow with Platoons of Intelligent Connected Vehicles.” Physica A: Statistical Mechanics and Its Applications 557: 124829. doi:10.1016/j.physa.2020.124829.
- Chen, D., S. Ahn, M. Chitturi, and D. A. Noyce. 2017. “Towards Vehicle Automation: Roadway Capacity Formulation for Traffic Mixed with Regular and Automated Vehicles.” Transportation Research Part B: Methodological 100: 196–221. doi:10.1016/j.trb.2017.01.017.
- Di, X., and R. Shi. 2021. “A Survey on Autonomous Vehicle Control in the Era of Mixed-autonomy: From Physics-based to AI-guided Driving Policy Learning.” Transportation Research Part C: Emerging Technologies 125: 103008.
- Ehlers, U. C., E. O. Ryeng, E. McCormack, F. Khan, and S. Ehlers. 2017. “Assessing the Safety Effects of Cooperative Intelligent Transport Systems: A Bowtie Analysis Approach.” Accident Analysis & Prevention 99: 125–141. doi:10.1016/j.aap.2016.11.014.
- Farah, H., and H. N. Koutsopoulos. 2014. “Do Cooperative Systems Make Drivers’ Car-following Behavior Safer?” Transportation Research Part C: Emerging Technologies 41: 61–72. doi:10.1016/j.trc.2014.01.015.
- Favarò, F. M., N. Nader, S. O. Eurich, M. Tripp, and N. Varadaraju. 2017. “Examining Accident Reports Involving Autonomous Vehicles in California.” Plos One 12 (9): e0184952. doi:10.1371/journal.pone.0184952.
- FHWA, F. H. A. 2020. Highway Statistics, 2019. Washington, DC: US Department of Transportation.
- Hartmann, M., N. Motamedidehkordi, S. Krause, S. Hoffmann, P. Vortisch, and F. Busch. 2017. “Impact of Automated Vehicles on Capacity of the German Freeway Network.” ITS World Congress 29.
- Hasenjäger, M., and H. Wersing. 2017. “Personalization in Advanced Driver Assistance Systems and Autonomous Vehicles: A Review.” In 2017 ieee 20th international conference on intelligent transportation systems (itsc), Yokohama, Japan, 1–7. IEEE.
- Heikoop, D. D., M. Hagenzieker, G. Mecacci, S. Calvert, F. Santoni De Sio, and B. van Arem. 2019. “Human Behaviour with Automated Driving Systems: A Quantitative Framework for Meaningful Human Control.” Theoretical Issues in Ergonomics Science 20 (6): 711–730. doi:10.1080/1463922X.2019.1574931.
- Hethcote, H. W. 2000. “The Mathematics of Infectious Diseases.” SIAM Review 42 (4): 599–653. doi:10.1137/S0036144500371907.
- Holzinger, J., P. Tkachenko, G. Obereigner, and L. Del Re. 2020. “Context Aware Control of ADAS.” In 2020 American Control Conference (ACC), Denver, USA, 2288–2293. IEEE.
- Huang, K., X. Di, Q. Du, and X. Chen. 2020. “Scalable Traffic Stability Analysis in Mixed-autonomy Using Continuum Models.” Transportation Research Part C: Emerging Technologies 111: 616–630. doi:10.1016/j.trc.2020.01.007.
- Itasca, I. 2015. National Safety Council—Injury Fact’. Itasca, IL, USA: National Safety Council.
- Jandial, A., P. Merdrignac, O. Shagdar, and L. Fevrier. 2019. “Implementation and Evaluation of Intelligent Roadside Infrastructure for Automated Vehicle with I2V Communication.” L. Anis, Q. Amir, and Mohamad, NMS edited by. Vehicular Ad-hoc Networks for Smart Cities. Singapore: Springer. 3–18.
- Kalra, N., and S. M. Paddock. 2016. “Driving to Safety: How Many Miles of Driving Would It Take to Demonstrate Autonomous Vehicle Reliability?” Transportation Research Part A: Policy and Practice 94: 182–193.
- Koopman, P., and M. Wagner. 2016. “Challenges in Autonomous Vehicle Testing and Validation.” SAE International Journal of Transportation Safety 4 (1): 15–24. doi:10.4271/2016-01-0128.
- Kulmala, R. 2010. “Ex-ante Assessment of the Safety Effects of Intelligent Transport Systems.” Accident Analysis & Prevention 42 (4): 1359–1369. doi:10.1016/j.aap.2010.03.001.
- Kyriakidis, M., J. C. de Winter, N. Stanton, T. Bellet, B. van Arem, K. Brookhuis, M. H. Martens, K. Bengler, J. Andersson, and N. Merat. 2019. “A Human Factors Perspective on Automated Driving.” Theoretical Issues in Ergonomics Science 20 (3): 223–249. doi:10.1080/1463922X.2017.1293187.
- Li, Y., H. Wang, W. Wang, L. Xing, S. Liu, and X. Wei. 2017. “Evaluation of the Impacts of Cooperative Adaptive Cruise Control on Reducing Rear-end Collision Risks on Freeways.” Accident Analysis & Prevention 98: 87–95. doi:10.1016/j.aap.2016.09.015.
- Lindgren, A., and F. Chen. 2006. “State of the Art Analysis: An Overview of Advanced Driver Assistance Systems (ADAS) and Possible Human Factors Issues.” Human Factors and Economics Aspects on Safety 38: 50.
- Liu, H., X. D. Kan, S. E. Shladover, X.-Y. Lu, and R. E. Ferlis. 2018. “Modeling Impacts of Cooperative Adaptive Cruise Control on Mixed Traffic Flow in Multi-lane Freeway Facilities.” Transportation Research Part C: Emerging Technologies 95: 261–279. doi:10.1016/j.trc.2018.07.027.
- Liu, H., H. Wei, T. Zuo, Z. Li, and Y. J. Yang. 2017. “Fine-tuning ADAS Algorithm Parameters for Optimizing Traffic Safety and Mobility in Connected Vehicle Environment.” Transportation Research Part C: Emerging Technologies 76: 132–149. doi:10.1016/j.trc.2017.01.003.
- Louw, T., G. Kountouriotis, O. Carsten, and N. Merat. 2015a. “Driver Inattention During Vehicle Automation: How Does Driver Engagement Affect Resumption Of Control?” In 4th International Conference on Driver Distraction and Inattention (DDI2015), Sydney: proceedings. ARRB Group.
- Louw, T., G. Kountouriotis, O. Carsten, and N. Merat. 2015b. “Driver Inattention During Vehicle Automation: How Does Driver Engagement Affect Resumption Of Control?” In 4th International Conference on Driver Distraction and Inattention (DDI2015), Sydney, Australia.
- Lu, Z., R. Happee, C. D. Cabrall, M. Kyriakidis, and J. C. de Winter. 2016. “Human Factors of Transitions in Automated Driving: A General Framework and Literature Survey.” Transportation Research. Part F, Traffic Psychology and Behaviour 43: 183–198. doi:10.1016/j.trf.2016.10.007.
- Makridis, M., K. Mattas, B. Ciuffo, M. A. Raposo, and C. Thiel. 2018. “Assessing the Impact of Connected and Automated Vehicles. A Freeway Scenario.” In In, Advanced Microsystems for Automotive Applications 2017, 213–225. Springe, Cham: Springer.
- Mamduhi, M. H., E. Hashemi, J. S. Baras, and K. H. Johansson. 2020. “Event-triggered Add-on Safety for Connected and Automated Vehicles Using Road-side Network Infrastructure.” IFAC-PapersOnLine 53 (2): 15154–15160. doi:10.1016/j.ifacol.2020.12.2082.
- Mecacci, G., and F. S. de Sio. 2019. “Meaningful Human Control as Reason-responsiveness: The Case of Dual-mode Vehicles.” Ethics and Information Technology 22 (2): 103–115.
- Mullakkal-Babu, F. A., M. Wang, X. He, B. van Arem, and R. Happee. 2020. “Probabilistic Field Approach for Motorway Driving Risk Assessment.” Transportation Research Part C: Emerging Technologies 118: 102716. doi:10.1016/j.trc.2020.102716.
- NHTSA. 2003. “A Compilation of Motor Vehicle Crash Data from the Fatality Analysis Reporting System and the General Estimates System.” National Highway Traffic Safety Administration. DOT HS 809: 775.
- NHTSA, N. H. T. S. A. 2008. “National Motor Vehicle Crash Causation Survey: Report to Congress.” National Highway Traffic Safety Administration Technical Report DOT HS 811: 059.
- NSC. 2020. Injury Facts. National Safety Council. https://injuryfacts.nsc.org/motor-vehicle/overview/type-of-crash/.
- Olia, A., H. Abdelgawad, B. Abdulhai, and S. N. Razavi. 2016. “Assessing the Potential Impacts of Connected Vehicles: Mobility, Environmental, and Safety Perspectives.” Journal of Intelligent Transportation Systems 20 (3): 229–243. doi:10.1080/15472450.2015.1062728.
- Organization, W. H. 2018. “Global Status Report on Road Safety 2018: Summary.” In.: World Health Organization.
- Oviedo-Trespalacios, O., J. Tichon, and O. Briant. 2021. “Is A Flick-through Enough? A Content Analysis of Advanced Driver Assistance Systems (ADAS) User Manuals.” Plos One 16 (6): e0252688. doi:10.1371/journal.pone.0252688.
- Parasuraman, R., M. Mouloua, and R. Molloy. 1996. “Effects of Adaptive Task Allocation on Monitoring of Automated Systems.” Human Factors: The Journal of the Human Factors and Ergonomics Society 38 (4): 665–679. doi:10.1518/001872096778827279.
- Pastor-Satorras, R., C. Castellano, P. Van Mieghem, and A. Vespignani. 2015. “Epidemic Processes in Complex Networks.” Reviews of Modern Physics 87 (3): 925. doi:10.1103/RevModPhys.87.925.
- Prasse, B., and P. Van Mieghem. 2020. “Network Reconstruction and Prediction of Epidemic Outbreaks for General Group-based Compartmental Epidemic Models.” IEEE Transactions on Network Science and Engineering 7 (4): 2755–2764. doi:10.1109/TNSE.2020.2987771.
- Pütz, F., F. Murphy, and M. Mullins. 2019. “Driving to a Future without Accidents? Connected Automated Vehicles’ Impact on Accident Frequency and Motor Insurance Risk.” Environment Systems and Decisions 39 (4): 383–395. doi:10.1007/s10669-019-09739-x.
- Rahman, M. S., and M. Abdel-Aty. 2018. “Longitudinal Safety Evaluation of Connected Vehicles’ Platooning on Expressways.” Accident Analysis & Prevention 117: 381–391. doi:10.1016/j.aap.2017.12.012.
- Regan, M. A., J. D. Lee, and K. Young. 2008. Driver Distraction: Theory, Effects, and Mitigation. Boca Raton, Florida, USA: CRC Press.
- Schakel, W. J., B. Van Arem, and B. D. Netten. 2010. “Effects of Cooperative Adaptive Cruise Control on Traffic Flow Stability.” In Intelligent Transportation Systems (ITSC), 2010 13th International IEEE Conference, Madeira, Portugal, 759–764. IEEE.
- Seppelt, B. D., and T. W. Victor. 2016. ‘Potential Solutions to Human Factors Challenges in Road Vehicle Automation.’ In, Road Vehicle Automation 3. Springer Cham: Springer.
- Shladover, S. E. 2009. “Cooperative (Rather than Autonomous) Vehicle-highway Automation Systems.” Intelligent Transportation Systems Magazine, IEEE 1 (1): 10–19. doi:10.1109/MITS.2009.932716.
- Shladover, S., D. Su, and X.-Y. Lu. 2012. “Impacts of Cooperative Adaptive Cruise Control on Freeway Traffic Flow.” Transportation Research Record: Journal of the Transportation Research Board, no. 1: 63–70. doi:10.3141/2324-08.
- Singh, H., V. Kushwaha, A. Agarwal, and S. Sandhu. 2016. “Fatal Road Traffic Accidents: Causes and Factors Responsible.” Journal of Indian Academy of Forensic Medicine 38 (1): 52–54. doi:10.5958/0974-0848.2016.00014.2.
- Sohrabi, S., A. Khodadadi, S. M. Mousavi, B. Dadashova, and D. Lord. 2021. “Quantifying the Automated Vehicle Safety Performance: A Scoping Review of the Literature, Evaluation of Methods, and Directions for Future Research.” Accident Analysis & Prevention 152: 106003. doi:10.1016/j.aap.2021.106003.
- Talebpour, A., H. S. Mahmassani, and S. H. Hamdar. 2015. “Modeling Lane-changing Behavior in A Connected Environment: A Game Theory Approach.” Transportation Research Procedia 7: 420–440. doi:10.1016/j.trpro.2015.06.022.
- Tunnell, J., Z. D. Asher, S. Pasricha, and T. H. Bradley. 2018. “Toward Improving Vehicle Fuel Economy with ADAS.” SAE International Journal of Connected and Automated Vehicles 1 (2): 81–92. doi:10.4271/12-01-02-0005.
- Uhlemann, E. 2015. “Introducing Connected Vehicles [Connected Vehicles].” IEEE Vehicular Technology Magazine 10: 23–31.
- van Lint, J. W. C., and S. C. Calvert. 2018. “A Generic Multi-level Framework for Microscopic Traffic simulation—Theory and an Example Case in Modelling Driver Distraction.” Transportation Research Part B: Methodological 117: 63–86. doi:10.1016/j.trb.2018.08.009.
- Virdi, N., H. Grzybowska, S. T. Waller, and V. Dixit. 2019. “A Safety Assessment of Mixed Fleets with Connected and Autonomous Vehicles Using the Surrogate Safety Assessment Module.” Accident Analysis & Prevention 131: 95–111. doi:10.1016/j.aap.2019.06.001.
- Wang, M., S. P. Hoogendoorn, W. Daamen, B. van Arem, and R. Happee. 2015. “Game Theoretic Approach for Predictive Lane-changing and Car-following Control.” Transportation Research Part C: Emerging Technologies 58: 73–92. doi:10.1016/j.trc.2015.07.009.
- Wang, J., J. Wu, and Y. Li. 2015. “The Driving Safety Field Based on Driver–vehicle–road Interactions.” Ieee Transactions on Intelligent Transportation Systems 16 (4): 2203–2214. doi:10.1109/TITS.2015.2401837.
- Wang, L., H. Zhong, W. Ma, M. Abdel-Aty, and J. Park. 2020. “How Many Crashes Can Connected Vehicle and Automated Vehicle Technologies Prevent: A Meta-analysis.” Accident Analysis & Prevention 136: 105299. doi:10.1016/j.aap.2019.105299.
- Watanabe, Y., and S. Ito. 2007. “Influence of Vehicle Properties and Human Attributes on Neck Injuries in Rear-end Collisions.” In Proceedings of the 20th International Technical Conference on the Enhanced Safety of Vehicles (CD-ROM). Washington, DC: National Highway Traffic Safety Administration.
- WHO. 2020. 'Herd immunity, lockdowns and COVID-19', World Health Organization, Accessed 4 March 2021. https://www.who.int/news-room/q-a-detail/herd-immunity-lockdowns-and-covid-19.
- Wickens, C. D., J. G. Hollands, S. Banbury, and R. Parasuraman. 2015. Engineering Psychology & Human Performance. New York, USA: Psychology Press.
- Yoo, J., and R. Langari. 2020. “A Game-theoretic Model of Human Driving and Application to Discretionary Lane-changes,” arXiv preprint arXiv:2003.09783.
- Young, K. L., P. M. Salmon, and M. Cornelissen. 2013. “Missing Links? the Effects of Distraction on Driver Situation Awareness.” Safety Science 56: 36–43. doi:10.1016/j.ssci.2012.11.004.
- Youssef, M., and C. Scoglio. 2011. “An Individual-based Approach to SIR Epidemics in Contact Networks.” Journal of Theoretical Biology 283 (1): 136–144. doi:10.1016/j.jtbi.2011.05.029.
- Ziebinski, A., R. Cupek, D. Grzechca, and L. Chruszczyk. 2017. “Review of Advanced Driver Assistance Systems (ADAS).” In AIP Conference Proceedings, vol. 1906, no. 1, p. 120002. AIP Publishing LLC.