
 ?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.
?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.ABSTRACT
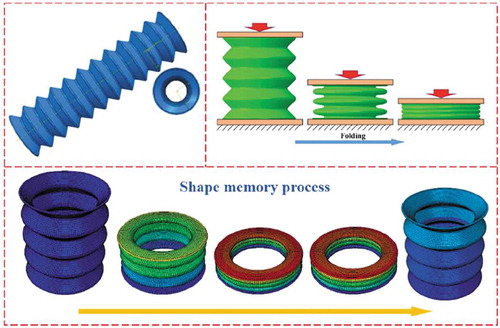
Space masts are widely used in the aerospace engineering as one type of deployable space structures. In this paper, based on the stimuli-responsive effects of shape-memory polymers (SMPs), an intelligent mast with shape-memory function is studied. The thermos-mechanical constitutive model of SMPs is associated with the finite element (FE) software, and then the deployable deformation and shape-memory effect of the intelligent mast are investigated by the FE method. It is demonstrated that the mast can automatically deploy due to the shape recovery characteristics of SMPs. Furthermore, the effects of structure parametric of the mast and temperature are also investigated. The results can contribute to the design and application of novel SMP masts.
Graphical Abstract
1. Introduction
Space masts, a basic type of deployable space structures for constructing large complex space structures [Citation1], are one-dimensional deployable structures, which can realize the function of deploying in space after launching from a small size on the ground [Citation2]. Hence, space masts play an important role in various space exploration activities, especially in large deployment antennas, solar sails, telescope support back frames [Citation3–Citation6], etc. Researchers have done a lot of work on the design and analysis of spreadable masts [Citation7]. Deng et al. [Citation8] designed a tapered deployable mast with lower weight and higher stiffness. The mast has excellent performance on mechanical properties when compared with a normal mast with identical cross-section. Katsumata et al. [Citation9] investigated the deployment behavior of inflatable booms with zigzag and modified zigzag folding patterns by experimental and theoretical methods. Roh et al. [Citation10] investigated the time- and temperature-dependent folding and unfolding behavior of thin-walled softenable composite boom that fabricated with woven fabric fibers and shape-memory polymer (SMP). Yang et al. [Citation11] performed a modal analysis of deployable composite triangular rollable and collapsible booms using nonlinear explicit dynamics analysis, and an optimal design method for the wrapping of the triangle rollable and collapsible (TRAC) boom is presented based on the response surface theory.
Several types of space masts are currently used, such as the inflatable masts [Citation12], the masts used for morphing structures [Citation13], the thin-walled composite deployable masts [Citation14], the masts based on tape springs [Citation15], the telescopic masts [Citation16], and so on. Each mast has its advantages and disadvantages, e.g. the telescopic masts weigh highand require complex drive, and inflatable stretch the arm weight small speed but insufficient deployment of stiffness [Citation17]. SMPs are flexible at high temperatures and rigid at low temperatures [Citation18], which perfectly meets the design requirements of the deployable masts. Also, SMPs have been proven to have good applicability in the aerospace field [Citation19, Citation20]. In addition, due to the shape-memory effect of SMPs, SMP mast does not require an external drive and can be deployed only by heating, e.g. resistance heating film can be used for heating [Citation21].
SMPs are a class of intelligent materials with shape-memory effect. They are capable of changing its size and shape when activated through a suitable stimuli like heat [Citation22–Citation23], light [Citation24–Citation25], electricity [Citation26–Citation27], solution [Citation28], and so on [Citation29–Citation31]. SMPs are particularly promising in aerospace [Citation20–Citation32], biomedical [Citation33–Citation34], additive manufacturing [Citation35–Citation36], and other engineering fields [Citation37–Citation39] owing to their characteristic of high deformability, high shape recoverability and easy processing [Citation40–Citation41]. Thermal-responsive SMPs are the most prospective SMPs because of their simple stimulus form and fast response [Citation42]; thus, they are investigated in the present work.
Nevertheless, the experimental study for deployable space structures is difficult in the simulated space microgravity environment. Meanwhile, the testing methods for some parameters are more complicated and it is difficult to collect data. Therefore, the numerical simulation method with the advantages of high efficiency, high flexibility, and high accuracy has become an effective research method.
In this paper, a space mast was designed based on the characteristics of SMPs. The mast can be compressed into folding state and can be actively deplored by heating. The three-dimensional constitutive equation of thermally driven SMPs under complex stress conditions was developed in order to understand the proposed research. Then, the shape-memory process of SMP mast was analyzed by the finite element (FE) method, while the effects of structural parameters and temperature on SMP mast were investigated.
2. Thermo-mechanical constitutive theory
2.1. Constitutive equation of SMPs
The thermo-mechanical constitutive model of SMPs is one of the main methods to predict the thermo-mechanical behavior of SMPs under different conditions [Citation32]. In this paper, considering the thermo-mechanical properties of SMPs, a three-dimensional thermo-mechanical constitutive equation of SMP structures under complex stress conditions is introduced based on the viscoelastic theory. Then, based on the above equation, the user material subroutine (UMAT) of SMPs called by the FE software ABAQUS is written in FORTRAN code. Also, the mechanical behavior of SMP mast with shape-memory effect can be described intuitively and clearly by this method.
Tobushi et al. [Citation43,Citation44] developed a linear viscoelastic constitutive equation by introducing a slip element into a linear viscoelastic model.
where ,
, and
denote stress, strain, and temperature, respectively.
,
,
, and
are the elasticity modulus, viscosity, delay time, and coefficient of thermal expansion, respectively.
is creep residual strain,
is creep strain, while
is the proportional coefficient of unrecoverable strain.
Assuming that the polymers are isotropic materials, Equation (1) can be extended from one-dimension to three-dimensions [Citation42], and the stress–strain–temperature relationship is as follows:
where ,
,
, and
denote stress, strain, creep residual strain, and temperature, respectively.
,
,
, and
are the elasticity modulus, viscosity, delay time, and coefficient of thermal expansion, respectively.
,
,
, and
denote Poisson’s ratio, temperature-dependent scale factor, creep strain, and creep strain threshold, respectively. Based on the study of Bhattacharyya et al. [Citation45], the viscosity coefficient
, the retardation time
, and the creep residual strain
are replaced by:
under the conditions, and
. The three-dimensional thermo-mechanical constitutive model of SMPs is described as Equation (3).
2.2. Material parameter equation of SMPs
The shape-memory effect of SMPs is the result of phase transformation between glass state at low temperature and rubber state at high temperature. Temperature has an effect on the mechanical properties of SMPs during glass transition, which means that the material parameters such as elastic modulus, viscous coefficient, and retardation time vary with temperature. In order to describe the thermo-mechanical property of SMPs, the relationship between material parameters and temperature must be established.
According to the previous research [Citation46], a function describing temperature and material parameters is introduced into the constitutive model to explain the changes of polymer material parameters and strain during the process of shape memory [Citation31], which is expressed as:
where and
denote viscosity coefficients at high temperature and low temperature, respectively.
is the glass transition temperature,
is the temperature difference between low temperature and high temperature at the range of glass transition temperature.
The equations of material parameters as a function of the varying temperature are given as follows:
where ,
,
,
,
, and
denote the modulus of elasticity, delay time, and Poisson’s ratio, respectively, at high temperature and low temperature.
Based on the SMP constitutive equation and material parameter equation, the user material subroutine (UMAT), which can be called by ABAQUS, is developed to realize the FE simulation analysis of SMPs and their structures under complex stress.
3. Design and analysis of SMP mast
3.1. Structure design of SMP mast
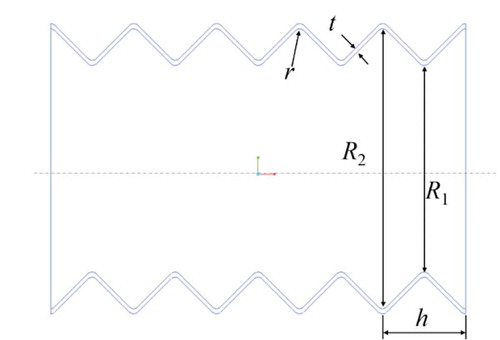
The model of the SMP mast designed in this work is demonstrated in and the structural parameters of the SMP mast are shown in . Here, h and t denote the unit height and the wall thickness, respectively, while R1, R2, and r represent the inside diameter, the external diameter, and the transition fillet radius, respectively. The initial configuration parameters are set as follows: the wall thickness t = 2.5 mm, the unit height h = 40 mm, the inside diameter R1 = 50 mm, the external diameter R2 = 70 mm, and transition fillet radius r = 2.5 mm. In order to save the computational resources while ensuring the accuracy of the simulation, four units with a total length of 160 mm are selected considering the axial symmetry of the model.
Figure 1. The model of SMP mast.
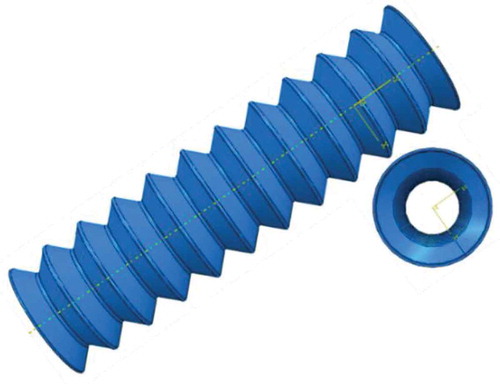
Figure 2. Structural parameters of SMP mast.
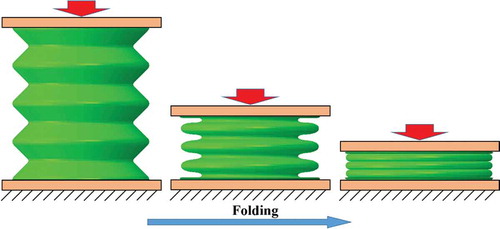
The axial compression load is applied for folding of SMP mast. As shown in , under high temperature (, SMP is in rubber state), the mast can be compressed from the initial state to folded state. The folded state can be fixed after cooling. When heating up again, the mast can be reversibly deployed to the initial state.
Figure 3. The schematic diagram of SMP mast folding process.
3.2. FE model of SMP mast
During the process of FE simulation, the quasi-static Newton–Raphson method is used to calculate the nonlinear incremental analysis, and C3D8 hexahedron element with a cell size of 2 mm is used to mesh the model as shown in ). In order to ensure the uniformity of folding, a circular rigid plate is set up on the top and bottom of the mast, while frictionless contact is set between the rigid body and the mast. gives the parameters of SMPs based on polyurethane. SMPs have a glass transition temperature of 328 K and a glass transition range of 308–353 K. As shown in , the original coordinates of control points RP1 and RP2 are set at geometric centers of the two rigid plates, respectively. The point RP2 is fixed and point RP1 is prescribed as 140-mm compression displacement along the y-axis to simulate the folding of SMP mast.
Figure 4. FE model of SMP mast. (a) FE mesh and (b) boundary conditions.
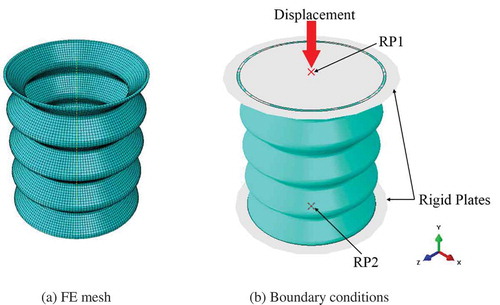
Table 1. Material parameters of SMPs based on polyurethane.
4. Results and discussions
4.1. Deformation-process of SMP mast
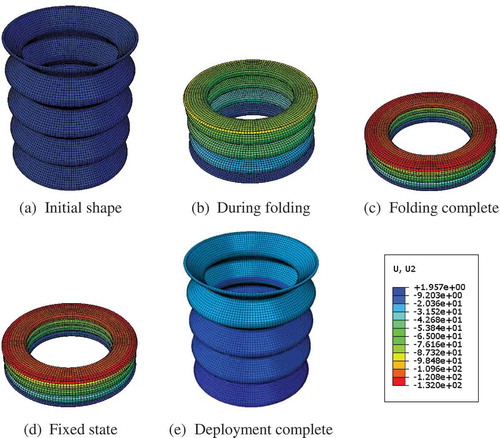
shows the deformation of SMP mast from folding to deployment. The deformation of SMP mast consists of four steps. Step 1 is loading at a high temperature. SMP mast with an initial shape is compressed into folded shape (–) during this step. Then, the high-temperature field with 343 K turns into a low-temperature field with 313 K in step 2. During step 3, the compression load applied to SMP mast is removed while SMP mast maintains the folded state (). And, the last step is the heating stage, in which the temperature rises again from 313 to 343 K, and SMP mast gradually returns to its initial shape from the folded state, as shown in .
Figure 5. Deformation during folding process of SMP mast: (a) Initial shape, (b) during folding, (c) folding complete, (d) fixed state, and (e) deployment complete.
Actually, the most important thing in the application of the mast is the stability and reliability [Citation23]. Besides, considering the space microgravity environment, only the foldability, deployability and the stability during folding and deployment process are studied.
shows the strain energy–displacement curve of SMP mast in the folding process. During the folding process, the mechanical energy is stored in the form of strain energy. When the temperature rises, the storage strain energy is released, and the mast can automatically deploy. Strain energy is also an index to judge whether the structure produces buckling. If the strain energy is not mutated, no buckling occurs. It can be seen that there is no obvious buckling during the folding process. Moreover, strain energy increases nonlinearly with the growth of the displacement of the plate, and the rate of rise increases gradually. At the end of the folding process, the rate of rise suddenly increases, and strain energy goes up to a larger value in a short time due to the massive self-contact of SMP mast. During the deployment process, the displacement of SMP mast recovers steadily as the temperature increases as shown in . Therefore, it can be considered that the working process of this novel SMP mast is stable and reliable.
Figure 6. Strain energy–displacement curve during folding process.
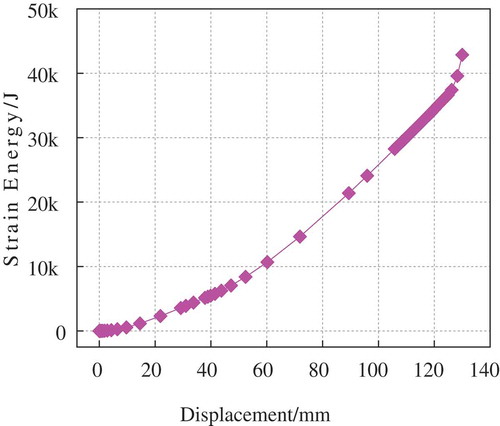
Figure 7. Displacement–temperature curve during deployment process.
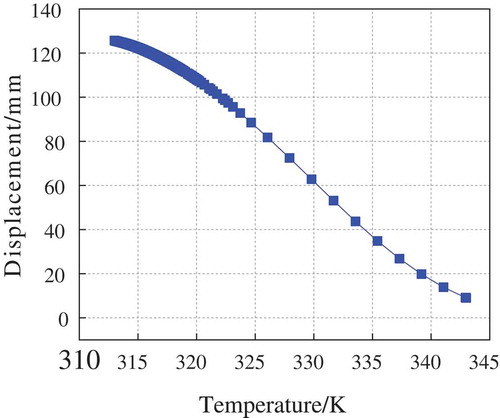
The SMP mast has to remain the temporary folding state after compression and recover automatically to the initial length under external excitation, if it can be used as a deployable structure. The results of the SMP mast in this work are consistent with the above requirements. Displacement–temperature curves of the top surface of the mast during the whole process are plotted in .
Figure 8. Displacement–temperature curve of SMP mast during shape-memory process.
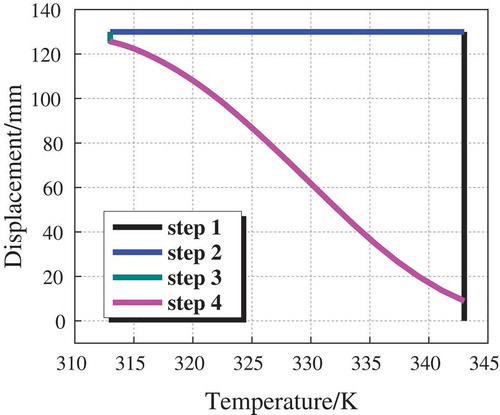
After unloading at a low temperature in step 3, a small part of the deformation recovers while most deformation is frozen, SMP mast can maintain folding state stably. In step 4, SMPs transform from glass state to rubber state gradually when the temperature rises from 313 to 343 K, the frozen deformation is released, and SMP mast deployed to the initial state. At the end of this step, there is a small amount of irrecoverable strain due to the existence of residual creep strain considered in constitutive model, which also conforms to the material properties of SMPs [Citation1]. The ratio of the axial-shortened length after folding to the initial length is used to characterize the folding-deployment ratio (FDR), it is also found from that the mast has a great FDR, which is 81.25%. In addition, the shape-fixed ratio (SFR) of SMP mast is 96.68% and shape recovery ratio (SRR) is 92.82%. In other words, the SMP mast has excellent foldability and deployability as well as outstanding shape-memory effect.
4.2. Effect of the temperature
SMPs are a kind of temperature-sensitive material, which shows different mechanical properties at different temperatures. It is necessary to choose the reasonable temperature in application of SMP mast. Hence, the folding and deployment process of SMP mast at different temperatures is studied in this paper. The SMPs used in the FE simulations are polyurethane materials with glass transition temperature of 328 K, and the loading deformation process needs to be carried out in the rubber state of SMPs. Therefore, the simulation temperature in folding and deployment process varies from 333 to 353 K with an interval of 5 K, while the low temperature is always set to 313 K. shows the strain energy–displacement curve of SMP mast during folding process and the displacement–temperature curves during the deployment process at different temperatures.
Figure 9. Folding and deployment process of SMP mast with different temperatures. (a) Strain energy–displacement curves with different temperatures during folding process. (b) Displacement–temperature curves with different temperatures during deployment process.
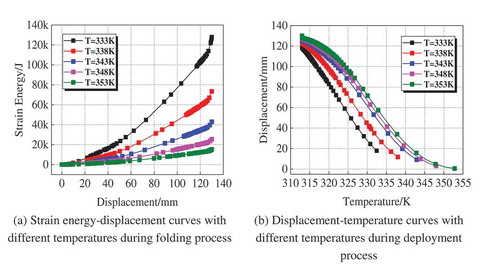
Because the SMPs have low elastic modulus when the temperature is high, the strain energy decreases gradually with the increase in temperature. In addition, the temperature difference is greater with the higher temperature of the high temperature when the temperature of the low-temperature field is the same in the calculation process; thus, the SMP mast has a greater SFR after unloading at low temperature in the glass conversion process. Similarly, with the increase of temperature in the deployment process, the SRR of SMP mast increases, and the mast can almost completely recover at 353 K. Moreover, the compression folding and deployment process of SMP mast are stable and reliable under various temperatures of 333–353 K.
4.3. Effect of the wall thickness
Although the folding and deployment of SMP mast mainly depend on the difference of mechanical properties between glass and rubber state and the shape-memory effect of polymer, its geometric shapes and sizes also have important influences on the working process due to the material-structure coupling response of the intelligent deformation process of the mast. Because the folding process requires that the deformation should be as smooth as possible without any possibility of buckling, and the wall thickness has great influences on buckling, the folding processes of SMP mast with different wall thicknesses are considered in this work.
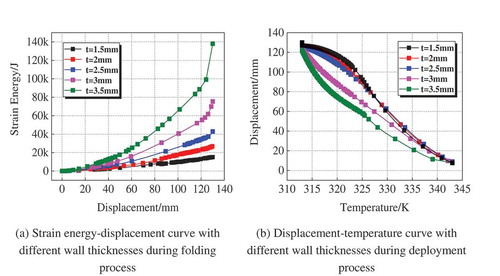
To explore the effect of the wall thickness on the properties of SMP mast, the wall thicknesses are set from 1.5 to 3.5 mm with an interval of 0.5 mm and the other structural parameters stay constant. shows strain energy–displacement curves of SMP mast during folding process and displacement–temperature curve with different wall thicknesses. When the wall thickness is 1.5 mm, micro-buckling phenomenon appeared due to the small wall thickness from , but it has no influence on the completion of folding process. Yet, the wall thickness of 1.5 mm is not desirable in order to ensure the requirement of structural stability. Meanwhile, the strain energy when the wall thickness is above 3 mm is significantly greater than that when the wall thickness is smaller in folding process. During the deployment process (), when the wall thickness is between 1.5 and 2.5 mm, and the temperature is lower than 328 K (SMPs are still in glass state), the SMP mast has a larger deployment speed with the higher wall thickness. On the contrary, the SMP mast has a larger deployment speed with the smaller wall thickness when the temperature rises above 328 K. When the wall thickness increases to more than 3 mm, the influence of the mast structure on the deployment speed is greater than that of temperature on the deployment speed due to the large strain energy stored in the folding process, and the deployment speed increases with the increase of the wall thickness. Besides, the SFR and SRR are at the same level under all wall thickness conditions, as shown in , that is, the SFR and the SRR are not affected by wall thickness.
Figure 10. Folding and deployment process of SMP mast with different wall thicknesses. (a) Strain energy–displacement curve with different wall thicknesses during folding process. (b) Displacement–temperature curve with different wall thicknesses during deployment process.
4.4. Effect of transition fillet radius
In addition, the folding processes of SMP masts with different transition fillet radiuses are also investigated in this work. The transition fillet radiuses are set from 0.5 to 4.5 mm with an interval of 1 mm while other structural parameters are unchanged. shows strain energy–displacement curves of SMP mast during folding process and displacement–temperature curve with different wall thicknesses.
Figure 11. Folding and deployment process of SMP mast with different transition fillet radiuses. (a) Strain energy–displacement curve with different transition fillet radiuses during folding process. (b) Displacement–temperature curve with different transition fillet radiuses during deployment process.
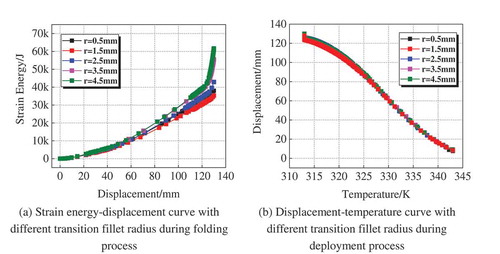
From , when the transition fillet radiuses are 0.5, 1.5, and 2.5 mm, there is a small difference in the strain energy values, while when the transition fillet radiuses are 3.5 and 4.5 mm, the strain energy values are close and slightly larger than the former. The effect of transition fillet radius on strain energy is much smaller than that of temperature and wall thickness. For the deployment process, it is almost unaffected by the change of the transition fillet radius which shown in .
5. Conclusions
In this paper, an intelligent SMP mast was designed and its folding and deployment function is investigated based on the three-dimensional constitutive equation of SMPs. The effects of structural parameters and temperature on SMP mast are discussed. The findings can be summarized as follows:
This novel SMP mast can be folded to a smaller size at high temperature and temporarily maintained the folding deformation after unloading at low temperature, and then it can actively deploy and recover to the original size after heating. Moreover, the whole deformation process is stable and reliable.
The temperature has influence on the folding and deployment process of SMP mast. However, the compression folding and deployment process of SMP mast are stable and reliable under various temperatures of 333–353 K.
The SMP mast with the wall thickness of 1.5 mm is not desirable in order to ensure the requirement of structural stability, and the SFR and the SRR are not affected by wall thickness. Besides, the transition fillet radius has little effect on the fold and deployment of SMP mast.
Acknowledgments
This work was supported by the National Natural Science Foundation of China (Project Number 11632005, 11772012, and 11872079), which were gratefully acknowledged.
Disclosure statement
No potential conflict of interest was reported by the authors.
Additional information
Funding
References
- H.Q. Li, X.F. Liu, S.J. Guo, and G.P. Cai, Deployment dynamics and control of large-scale flexible solar array system with deployable mast, Adv. Space Res. 58 (2016), pp. 1288–1302. doi:10.1016/j.asr.2016.06.008.
- V.R. Martinez and E. Perez, Aeronautics and astronautics: Recent progress and future trends, P. I. Mech. Eng. 223 (2009), pp. 2767–2820. doi:10.1243/09544062JMES1546.
- L. Johnson, R. Young, E. Montgomery, and D. Alhorn, Status of solar sail technology within NASA, Adv. Space Res. 48 (2011), pp. 1687–1694. doi:10.1016/j.asr.2010.12.011.
- Y. Jin, T. Liu, R. Lyu, B. Ji, and Q. Cui, Theoretical analysis and experimental investigation on buckling of Fast Mast Deployable Structures, Int. J. Struct. Stab. Dy. 15 (2015), pp. 1450075. doi:10.1142/S0219455414500758.
- I. Stanciulescu, L.N. Virgin, and T.A. Laursen, Slender solar sail booms: Finite element analysis, J. Spacecraft Rockets. 44 (2007), pp. 528–537. doi:10.2514/1.20526.
- L. Puig, A. Barton, and N. Rando, A review on large deployable structures for astrophysics missions, Acta Astronaut 67 (2010), pp. 12–26. doi:10.1016/j.actaastro.2010.02.021.
- H. Yang, L. Liu, H.W. Guo, F.S. Lu, and Y.B. Liu, Wrapping dynamic analysis and optimization of deployable composite triangular rollable and collapsible booms, Struct. Multidisc. Optim. 59 (2019), pp. 1371–1383. doi:10.1007/s00158-018-2118-9.
- Q. Deng, B. Li, H.L. Huang, R.Q. Liu, and Z.Q. Deng, Design and analysis of a tapered deployable mast, Key Eng. Mater. 450 (2010), pp. 31–34. doi:10.4028/www.scientific.net/KEM.450.31.
- N. Katsumata, M.C. Natori, and H. Yamakawa, Analysis of dynamic behaviour of inflatable booms in zigzag and modified zigzag folding patterns, Acta Astronaut 93 (2014), pp. 45–54. doi:10.1016/j.actaastro.2013.06.008.
- J.H. Roh and J.S. Bae, Softenable composite boom for reconfigurable and self-deployable structures, Mech. Compos. Mater. St. 24 (2017), pp. 698–711.
- H. Yang, H.W. Guo, Y. Wang, R.Q. Liu, and M. Li, Design and Experiment of triangular prism mast with tape-spring hyperelastic hinges, Chin. J. Mech. Eng. 31 (2018), pp. 33–44. doi:10.1186/s10033-018-0242-5.
- D. Auslander, J. Cermenska, G. Dalton, M.D.L. Pena, C.K.H. Dharan, W. Donokowski, R. Duck, J. Kim, et al, Instrument boom mechanisms on the THEMIS satellites; magnetometer radial wire and axial booms, Space Sci. Rev. 141 (2008), pp. 185–211. doi:10.1007/s11214-008-9386-4.
- J. Wei, H. Tan, W. Wang, and X. Cao, Deployable dynamic analysis and on-orbit experiment for inflatable gravity-gradient boom, Adv. Space Res. 55 (2015), pp. 639–646. doi:10.1016/j.asr.2014.10.024.
- A. Stabile and S. Laurenzi, Coiling dynamic analysis of thin-walled composite deployable boom, Compos. Struct. 113 (2014), pp. 429–436. doi:10.1016/j.compstruct.2014.03.043.
- H.M.Y.C. Mallikarachchi and S. Pellegrino, Deployment dynamics of ultrathin composite booms with tape-spring hinges, J. Spacer Rockets 51 (2014), pp. 604–613. doi:10.2514/1.A32401.
- L. Bogdan and E. Toma, New solution for telescopic robotic arm, Appl. Mech. Mater. 658 (2014), pp. 557–562. doi:10.4028/www.scientific.net/AMM.658.
- J. Zhang, A. Song, X. Xu, and W. Lu, A rigid and flexible structures combined deployable boom for space exploration. 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE. 2016. doi:10.1109/IROS.2016.7759452.
- I. Kolesov, O. Dolynchuk, and H.J. Radusch, Shape-memory behavior of cross-linked semi-crystalline polymers and their blends, Express Polym. Lett. 9 (2015), pp. 3. doi:10.3144/expresspolymlett.2015.24.
- S.B. Hong, Y.S. Ahn, J.H. Jang, J.G. Kim, N.S. Goo, and W.R. Yu, Mechanical analysis of carbon fiber reinforced shape memory polymer composite for self-deployable structure in space environment. Behavior & Mechanics of Multifunctional Materials & Composites. International Society for Optics and Photonics, 2016. doi:10.1117/12.2218404 .
- X. Lan, Y. Liu, H. Lv, X. Wang, J. Leng, and S. Du, Fiber reinforced shape-memory polymer composite and its application in a deployable hinge, Smart Mater. Struct. 18 (2009), pp. 024002. doi:10.1088/0964-1726/18/2/024002.
- X.Y. Lee, M.U. Wahit, and N. Adrus, Biodegradable and temperature-responsive thermoset polyesters with renewable monomers, J. Appl. Polym. Sci. 133 (2016), pp. 40.
- G. Yang, X. Liu, A.I.Y. Tok, and V. Lipik, Body temperature-responsive two-way and moisture-responsive one-way shape memory behaviors of poly (ethylene glycol)-based networks, Polym. Chem-UK. 8 (2017), pp. 25. doi:10.1039/C7PY00786H.
- B. Xu, L. Zhang, Y.T. Pei, J.K. Luo, S.W. Tao, J.T.M. De Hosson, and Y.Q. Fu, Electro-responsive polystyrene shape memory polymer nanocomposites, Nanosci. Nanotechnol. Lett. 4 (2012), pp. 814. doi:10.1166/nnl.2012.1393.
- N. Rogers and F. Khan, Characterization of deformation induced changes to conductivity in an electrically triggered shape memory polymer, Polym. Test. 32 (2013), pp. 71–77. doi:10.1016/j.polymertesting.2012.10.001.
- A. Lendlein, H. Jiang, O. Jünger, and R. Langer, Light-induced shape-memory polymers, Nature 434 (2005), pp. 879–882. doi:10.1038/nature03496.
- J.S. Sodhi, P.R. Cruz, and I.J. Rao, Inhomogeneous deformations of light activated shape memory polymers, Int. J. Eng. Sci. 89 (2015), pp. 1–17. doi:10.1016/j.ijengsci.2014.11.010.
- W. Guo, L. C H, R. Orbach, F. Wang, Q. X J, A. Cecconello, D. Seliktar, and I. Willner, PH-stimulated DNA hydrogels exhibiting shape-memory properties, Adv. Mater. 27 (2015), pp. 73–78. doi:10.1002/adma.201403702.
- L. Chen, Y. Liu, and J. Leng, Microwave responsive epoxy nanocomposites reinforced by carbon nanomaterials of different dimensions, J. Appl. Polym. Sci. 135 (2017), pp. 45676. doi:10.1002/app.45676.
- T. Xie, Recent advances in polymer shape memory, Polym 52 (2011), pp. 4985–5000. doi:10.1016/j.polymer.2011.08.003.
- M.D. Hager, S. Bode, C. Weber, and U.S. Schubert, Shape memory polymers: Past, present and future developments, Prog. Polym. Sci s49–50 (2015), pp. S0079670015000489.
- R. Tao, X. Liu, Q.S. Yang, and X.Q. He, Design and analysis of smart diaphragm based on shape memory polymer, J. Appl. Polym. Sci. 135 (2018), pp. 46557. doi:10.1002/app.46557.
- Y. Liu, H. Du, L. Liu, and J. Leng, Shape memory polymers and their composites in aerospace applications: A review, Smart Mater. Struct. 23 (2014), pp. 023001. doi:10.1088/0964-1726/23/2/023001.
- Kumar B, Hu J, Pan N, and Narayana H, A smart orthopedic compression device based on a polymeric stress memory actuator. Mater. Design. 97 (2016) 222–229.
- G.J.M. Antony, C.S. Jarali, S.T. Aruna, and S. Raja, Tailored poly(ethylene) glycol dimethacrylate based shape memory polymer for orthopedic applications, J. Mech. Behav. Biomed. 65 (2017), pp. 857–865. doi:10.1016/j.jmbbm.2016.10.011.
- Y. Mao, K. Yu, M.S. Isakov, J. Wu, M. Dunn, and H.J. Qi, Sequential self-folding structures by 3D printed digital shape memory polymers, Sci. Rep-UK. 5 (2015), pp. 13616. doi:10.1038/srep13616.
- Q. Ge, A.H. Sakhaei, H. Lee, C.K. Dunn, N.X. Fang, and M.L. Dunn, Multimaterial 4D printing with tailorable shape memory polymers, Sci. Rep-UK. 6 (2016), pp. 31110. doi:10.1038/srep31110.
- X. Li and M.J. Serpe, Understanding the shape memory behavior of self-bending materials and their use as sensors, Adv. Funct. Mater. 26 (2016), pp. 3282–3290. doi:10.1002/adfm.201505391.
- T. Ware, D. Simon, K. Hearon, C. Liu, S. Shah, J. Reeder, N. Khodaparast, M.P. Kilgard, D.J. Maitland, and R.L.I.I. Rennaker, Three-dimensional flexible electronics enabled by shape memory polymer substrates for responsive neural interfaces, Macromol. Mater. Eng. 297 (2012), pp. 1193–1202. doi:10.1002/mame.201200241.
- B. Aksoy, N. Besse, R.J. Boom, B.J. Hoogenberg, M. Blom, and H. Shea, Latchable microfluidic valve arrays based on shape memory polymer actuators, Lab Chip 19 (2019), pp. 608–617. doi:10.1039/C8LC01024B.
- Y. Liu, H. Lv, L. Xin, J. Leng, and S. Du, Review of electro-active shape-memory polymer composite, Compos. Sci. Technol. 69 (2009), pp. 2064–2068. doi:10.1016/j.compscitech.2008.08.016.
- F. Pilate, A. Toncheva, P. Dubois, and J.M. Raquez, Shape-memory polymers for multiple applications in the materials world, Eur. Polym. J. 80 (2016), pp. 268–294. doi:10.1016/j.eurpolymj.2016.05.004.
- R. Tao, Q.S. Yang, X.Q. He, and K.M. Liew, Parametric analysis and temperature effect of deployable hinged shells using shape memory polymers, Smart Mater. Struct. 25 (2017), pp. 115034. doi:10.1088/0964-1726/25/11/115034.
- H. Tobushi, T. Hashimoto, S. Hayashi, and E. Yamada, Thermomechanical constitutive modeling in shape memory polymer of polyurethane series, J. Intel. Mat. Syst. Str. 8 (1997), pp. 711–718. doi:10.1177/1045389X9700800808.
- H. Tobushi, K. Okumura, S. Hayashi, and N. Ito, Thermomechanical constitutive model of shape memory polymer, Mech. Mater. 33 (2001), pp. 545–554. doi:10.1016/S0167-6636(01)00075-8.
- A. Bhattacharyya and H. Tobushi, Analysis of the isothermal mechanical response of a shape memory polymer rheological model, Polym. Eng. Sci. 40 (2000), pp. 2498–2510. doi:10.1002/(ISSN)1548-2634.
- O.A. Balogun and C. Mo, Three-dimensional thermo-mechanical viscoelastic model for shape memory polymers with binding factor, J. Intel. Mat. Syst. Str. 27 (2016), pp. 1908–1916. doi:10.1177/1045389X15610905.