
 ?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.
?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.ABSTRACT
We report the synthesis of cellulose membranes from balsa wood with an exceptionally high responsivity to humidity change by chemical processing and mechanical compression. By varying the ambient humidity, the produced cellulose membranes can provide a variety of predetermined deformations, such as curve, s-like deformation and curl. The high humidity responsivity is originated from a self-maintained moisture gradient induced by an asymmetrical design of membrane surfaces, aided by the hygroscopic swelling of the cellulose. The moisture-driven actuators are then demonstrated as a three-finger gripper that can grab, hold and release objects 40 times the weight of its own. The combination of natural wood and stimuli-responsive behavior open a way to designing smart structures, actuators and soft robots with environmentally friendly, recyclable and biocompatible materials.
Graphical abstract

Introduction
The rational design and realization of smart materials are one of the fast-growing fields in materials science and engineering [Citation1–8]. The functional materials with a controllable and intelligent response to external stimuli are of particular appeal and practical import, especially when the responsiveness is inherently incorporated in the materials [Citation9–14]. One of the most typical applications of these materials is to serve as actuators, which convert the external stimulation from moisture variations as well as thermal, optical, electric and magnetic fields into desirable mechanical deformations or motions. These smart materials have exhibited huge potential for technological applications in soft robots, artificial muscles, bionic devices and shape-memory devices [Citation15–20].
Among various actuators, humidity-responsive actuators can deform as a response to the change of humidity via the asymmetric absorption-desorption of water or swelling-deswelling of active layers [Citation21]. This sort of actuators avoids the use of large optical, electric and magnetic fields that not only require sophisticated devices to generate but also may cause local heating to undermine the durability of materials. The humidity-driven actuators have been fabricated with various natural or artificial materials, including copy paper, π-stacked carbon nitride polymer, xerogel film, NaAlg-epoxidized natural rubber, cellulose nanomaterials, carbon nanotubes/shape memory polyurethane, paper derived from nature pollen, nafion-polypropylene-PDMS/graphite and agarose/polyacrylamide [Citation5,Citation15–17,Citation21–25].
Compared to these above materials, woods, as a typical biological material, hold great advantage for their abundance, renewability, sustainability, anisotropy, and unique three-dimensional porous structures. Nowadays, wood is not only used in engineering but also widely studied in scientific research. Existing studies have reported the processing of woods into transparent woods [Citation26,Citation27], super woods [Citation28] and ion regulation membranes [Citation29] as well as the fabrication of generating sets [Citation30,Citation31] and solar steam generation devices [Citation32]. However, some disadvantages are common to the existing humidity-responsive actuating materials, including complicated methods, expensiveness, deleteriousness and non-recyclability. There have been very few reports of using woods to develop stimulus-responsive materials.
In this work, we successfully fabricated thin cellulose membranes with high hydrophilicity, reconfigurability and recyclability from balsa woods by means of a series of unique processes including chemical processing, mechanical compression and heat treatment. Our extensive tests revealed an important role of the length rather than the width of the membranes in controlling the moisture-driven bending deformation. Interestingly, the curvature of the bent membrane is linearly proportional to the relative humidity difference (ΔRH) between two sides of the membrane. We further designed moisture-driven actuators by utilizing the asymmetric swelling and deswelling of the membranes, which enable a rich variety of predetermined deformations. In particular, we managed to prepare a three-finger gripper with the membranes that act as a robot hand to controllably grab and release objects 40 times the weight of the three fingers.
Experiments
Cellulose membrane preparation: The prepared balsa wood, which was cut along the vertical growth direction into various dimensions (thickness, = 1 mm; length, = 10 cm; width, <4 cm), was boiled in a solution made from 2.5 mol/L NaOH and 0.4 mol/L Na2SO3 for 10 h. Then, the wood was immersed into the boiling 2Na2CO3 · 3H2O2 (0.83 mol/L) solution for 20 h [Citation29]. After the treatment, the resulting wood was washed by deionized water several times and soaked in deionized water to get rid of residual chemical reagents. The removal of residual chemicals was done by washing the samples using deionized water for 5–6 times. The effective removal of the residual chemicals was ensured by a low ionic conductivity (<20 μS cm−1) of the solution in the final wash [Citation29]. To maintain its structure and shape, the wood was treated by freeze-drying. The dried wood was compressed to obtain thin membranes with different thicknesses by a tablet press machine. Finally, the membranes were heated to different temperatures and kept for 30 min in a vacuum protective atmosphere.
Characterization: The surface and the cross-sectional morphologies of the membrane were characterized by Field Emission Scanning Electron Microscopy (FE-SEM) (Zeiss SIGMA HD). The functional groups of the membrane were characterized by Fourier Transform Infrared Spectroscopy (FTIR) (Thermo is 50). The contact angle (CA) of the membrane was measured by Contact Angle Meter (JC2000DS). The environmental temperature and relative humidity were simultaneously measured by hygrothermograph (TH22R-EX).
Humidity responsivity test: The humidity responsivity of the membrane was measured by the device shown in . The humidity inside the box was adjusted by the humidifier and the relative humidity difference (ΔRH) between inside and outside of the box was measured by a hygrothermograph. The deflection angle and curvature of the membrane were measured to characterize the humidity responsivity performance of the membrane. The influences of the membrane size and the ΔRH on humidity responsivity of membranes were explored.
Tensile test: Tensile stress test was performed on an Electroforce 3200 mechanical testing machine. The test was carried at 23°C and relative humidity of 30% with no detectable air flow. The sample size was 3 cm long, 2 cm wide and 83 μm thick. The elongation rate was 0.02 mm per second [Citation33].
Results and discussions
The chemical treatments can extract the intertwined lignin and hemicellulose from natural wood, resulting in increased number of pores and channels. The loosely-textured celluloses can be sufficiently exposed to the environment. The final chemical components of the membrane mainly include cellulose, with only a small amount of lignin and hemicellulose since the membrane is not completely white [Citation29]. The porous structure favors the absorption and desorption of water from the cellulose membrane. shows the mechanism of humidity-induced bending in the membrane, which directs the following experiments [Citation34]. To better understand the humidity-response mechanism of the membrane, additional humidity responsivity tests were performed. The humidity responsivity of the membrane under different ΔRH is characterized by the curvature (ρ, cm−1) [Citation21] of the membrane, read as
Figure 1. A schematic of a moisture-based actuation in our cellulose membranes
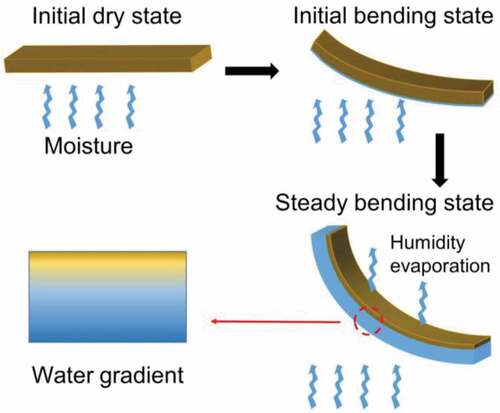
where ρ is the curvature, θ is the deflection angle, and L is the free-bending length of the membrane. The length and width direction are perpendicular and parallel to the wood growth direction, respectively.
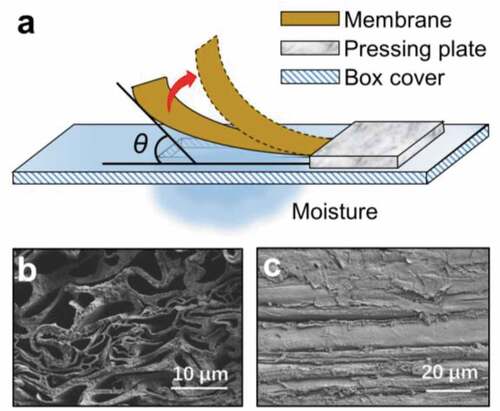
The high temperature heating can degrade the hemicellulose and amorphous cellulose, which then changes the microstructure of the membrane. The hydrolysis of the oxygen-containing functional groups under high temperature heating will reduce the wood hygroscopicity. As such, the membranes become inactivated. The curvature (ρ) as a function of the heat-treatment temperature (T) is shown in Figure S1. It is shown that the curvature sharply decreases with the heat-treatment temperature when it is higher than 300°C. At temperatures of 100 and 200°C, the cellulose membranes did not change color, suggesting a nearly pure drying process in which only water was desorbed from the membranes. When the temperature rises to 300°C or higher, the membranes became black due to a torrefaction process [Citation35–37]. In this process, the cellulose, lignin and hemicellulose underwent pyrolysis, resulting in reduced content of H and O in the membranes and, thereby, degraded humidity responsivity. show the scanning electron microscopy images of the cross-section and surface morphology of the cellulose membrane heated at 300°C, respectively. The images indicate that the cellulose membrane has a lot of micrometer-sized pores and channels which collapse after the mechanical compression.
Figure 2. (a) A schematic diagram of the device for testing humidity responsivity. θ denotes the deflection angle of the membrane upon exposure to the moisture gradient (shown in blue). (b) A scanning electron microscope image of the cross-section of a cellulose membrane. (c) A scanning electron microscope image of a laterally compressed membrane
As shown in the , the Fourier Transform Infrared Spectroscopy analysis of the fabricated membranes shows notable peaks at 3432.16 cm−1, characteristic of hydroxyl groups (O-H stretching vibration), 1630.52 cm−1 characteristic of C = O groups, and 1058.49 cm−1 characteristic of C-O groups (stretching) [Citation38]. This analysis suggests the membranes are rich in oxygen-containing functional groups, which ensure a highly hydrophilic surface (CA = 43.66°) and thereby a high efficiency of water vapor intake in the cellulose membrane, as demonstrated by the Movie S1. We put a drop of deionized (DI) water (10 μL) and measured the absorbed rate. It takes 16 s for the first drop of DI water to be completely absorbed, while for the second and third drops of DI water it takes 21 s and 30 s, respectively. The water intake will be saturated as the water content increases in the membrane. The moisture intake will cause rapid hygroscopic swelling and deswelling of the membranes upon external humidity stimuli [Citation22]. The hygroscopic properties of the cellulose membranes will favor the implementation of the humidity-driven actuators. We also tested the stress-strain curve of a dry cellulose membrane, as shown in . The tensile strength of the dry membrane is around 0.74 MPa and the membrane breaks at around 1.2% strain. The Young’s modulus of the sample is around 0.63 MPa.
Figure 3. (a) Fourier transform infrared spectroscopy analysis of the cellulose membrane. Inset: measured contact angle (CA = 43.66°) of the membrane. (b) Stress-strain curve of a dry cellulose membrane
The dependence of the membrane curvature on ΔRH is shown in . The length and width of the membrane are 1.6 and 0.8 cm, respectively. The membranes are homogenous. Due to the homogeneity, the membrane will not be responsive if there is no moisture gradient across it. presents the evolution of the membrane curvature with time under different ΔRH. As long as ΔRH ≠ 0, the membrane will bend in about several milliseconds, showing excellent responsiveness to the moisture gradient. The rate of increase of the curvature increases with ΔRH, suggesting a stronger responsiveness at a higher ΔRH. At a given ΔRH, the curvature increases rapidly at the initial stage and then reaches a saturated value as the exposure time further increases. The duration required to reach an equilibrium state increases with increasing ΔRH.
Figure 4. (a) Evolution of moisture-induced curvature (ρ) of a bent membrane with time (t) under different relative humidity differences (ΔRH). (b) A relationship of the ρ versus ΔRH. The insets show the bent membranes at ΔRH = 9% and 44%, respectively
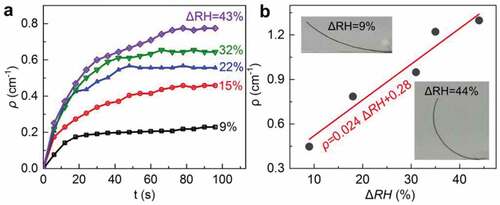
When ΔRH ≠ 0, the surface exposed to a high humidity environment will absorb more moisture to distinctly expand with respect to the other surface. Therefore, the membrane begins to bend and eventually reaches a stable curved state over time. The stable curvature is found to increase with increasing the ΔRH. We turn to further explore the relationship between the curvature and ΔRH, as shown in . The insets in show the bending profiles of the membrane at the ΔRH of 9% and 44%, respectively. The relationship between the curvature and the relative humidity difference (ρ-ΔRH) displays an approximately linear behavior delineated by ρ = 0.024 ΔRH + 0.28. The curvature increases as the ΔRH increases and the maximum curvature reaches 1.3 cm−1 at ΔRH = 44%, over twofold of previously reported xerogel films [Citation21]. This result indicates that the relative humidity is the main driving force of the membrane bending and the cellulose membrane can be used as a functional component that sensitively responses to the external stimuli rather than only working as a supportive substrate. Apparently, the membranes can incorporate with other active layers to produce greater curvature [Citation16]. The above results show that the cellulose membranes can be used to fabricate sensors to detect changes in the environmental humidity.
We adjusted the size of the membrane to study the effects of the width (W), length (L) and thickness (H) of the membrane on the bending behavior at ΔRH = 44%. The deflection angle (θ) does not change with the increasing of the width at L = 1.5 cm, which means that θ is almost immune to the variation of fiber length. However, θ shows an approximately linear function of L, fit by , at a given width of 0.3 cm (see ). Wood is known an anisotropic material because of highly orientated fibers. The length direction of the cellulose membrane is perpendicular to the fiber orientation. The membrane bends along the fibers due to the lateral expansion of the fibers. We have studied the relation between the deflection angle (θ) and length (L) of the cellulose membrane, as shown in Figure S2. Θ increases first with L, up to 76° at L = 3 cm, and decreases rapidly thereafter. When L exceeds 3 cm, the decrease of θ is attributed to an increased membrane weight that resists the bending by gravity. The images in show how the membrane with different L bends under the same ΔRH. They illustrate the structural integrity of the swollen membranes.
Figure 5. Effect of membrane size on the deflection angle (θ) and curvature (ρ). (a) The θ versus width (black) at a given length of 1.5 cm; the red data show results of θ versus the length, at a given width of 0.3 cm. (b) Profiles of bent membranes with different lengths, under a given ΔRH = 44%. (c) The relation between curvature (ρ) and the thickness (H) of the membranes. The length and width of the membrane are 1.6 and 0.8 cm, respectively. The relative humidity difference between two opposite surfaces of the membrane is around 50%
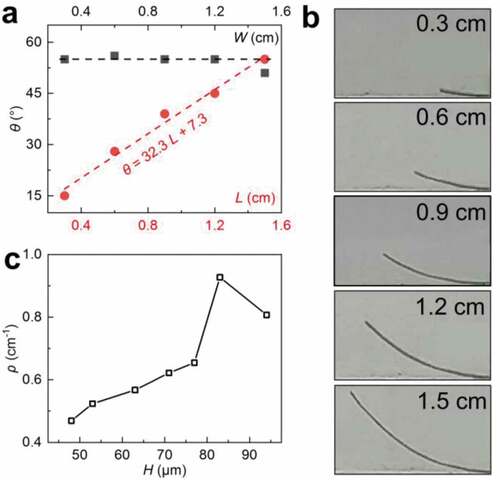
We performed additional experiments to study the effect of membrane thickness (H), as shown in . The membrane has a size of 1.6 × 0.8 cm2. The heat treatment temperature and time are 300°C and 30 min, respectively. We prepared cellulose membranes with different thickness by adjusting the compression pressure. The obtained H are 94, 83, 77, 71, 63, 53 and 48 μm at compression pressures of 0.5, 1, 2, 3, 4, 5 and 6 MPa, respectively. The membrane curvature first increases with increasing H to 83 μm and decreases thereafter. The maximal curvature reaches 0.92 cm−1 at H = 83 μm. The reason is that, when the compression pressure is higher than 1 MPa, the membrane structures become densified, resulting in the decrease of the curvature [Citation28]. These results indicate that both the membrane length and thickness can influence the angle θ of the membrane, supporting an important role of the membrane geometry in controlling the bending behavior. The results can be used to guide the design of actuators with specific shape and bending behaviors.
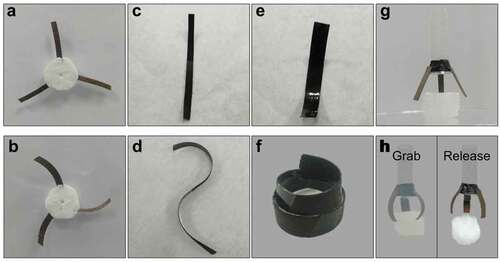
The actuator made purely from cellulose membranes is reversible, but works under only in the presence of a moisture gradient. Taking a membrane size of 1.6 × 0.8 cm2 for example, the recovery time is about 40–75 s. The deflection angle of the membrane decreases from 32° to 22° after 7 repeats, as shown in Figure S3. It can be seen from the above results that the prerequisite for the bending of the cellulose membrane is the imbalance of expansion caused by the humidity difference between two opposite surfaces of the membrane. In order to promote the application of cellulose membranes in ambient environment, they can be encapsulated to form the vertical humidity difference, by, for example, only sealing one surface of the membrane to prevent it from absorbing water. We design the moisture-driven actuators based on the cellulose membranes and transparent tapes, which enable different deformation modes by design, such as curve, s-like curve and curl, as shown in . Note that the actuator made from a cellulose membrane combined with transparent tapes is not reversible, but it can be responsive without a moisture gradient. In the case of curve, actuators whose left surfaces are completely sealed by a transparent tape will be bent in one direction in an environment with a relative humidity of 99%, shown in . The s-like curve can be achieved in an actuator, where both the upper left surface and lower right surface are sealed to allow for bending in two directions in the same environment (). The actuator whose left surface is completely sealed and right surface is sealed in part will curl in the same environment ().
Figure 6. Pre-determined deformations and application of the actuators. When the actuators are transferred from the ambient environment (a, c, e, g) to a high humidity environment with a relative humidity of 99% (b, d, f, h), their shapes will change according to the designs. (a, b) Curve. One surface of the actuator is completely sealed by a transparent tape. (c, d) S-like curve. The upper half is sealed on the left-hand side while the lower half is sealed on the right. (e, f) Curl. One surface is completely sealed while the other is partially sealed. (g, h) A three-finger gripper, which can grab, hold and release a 0.62 g foam 40 times the weight of the three fingers
After the chemical treatments, the cellulose membranes have a lot of micrometer-sized pores and channels, which can accommodate superparamagnetic nanoparticles and polymers [Citation39]. Then, it is expected that the actuators can offer directional motion under external stimuli, such as magnetic fields, which is pertinent in light of that the cellulose membranes are light to facilitate the motion. The motion can also be controlled by internal stress gradient [Citation40].
It is of more practical implication that a two-finger gripper made by paper actuators can grasp and lift a cubic polymer foam as heavy as 0.19 g [Citation16]. Furthermore, we use our actuators to make a three-finger gripper which can grasp and pick 0.62 g foam in an environment with a relative humidity of 99% (, Movie S2). This foam is 40 times the weight of the three fingers, which, to our knowledge, is the record high value for moisture-driven actuators. We attribute the high capability of load uptake to the relatively rigid cellulose components in the membranes.
Conclusion
The heat-treated cellulose membranes have been successfully prepared and demonstrated to act as moisture-driven actuators with designable deformations and high load uptake. Through different designs of the cellulose membranes, the as-produced actuators can sensitively convert humidity signals into various mechanical motions such as curve, s-like curve, curl, etc. A three-finger gripper made by actuators can grasp and pick 0.62 g foam that is 40 times the weight of the three ‘fingers’. The moisture-induced deflection angle is nearly immune to the variation of membrane width, but can increase with increasing the membrane length and thickness. At a given membrane size, the curvature is proportional to the relative humidity difference. The membranes made by natural wood are environmentally friendly and recyclable, which meets the requirements of sustainable development. These results open a wealth of opportunity for harnessing stimuli-responsivity of abundant wood materials for achieving new smart structures and devices, such as flexible robots and self-unfolding structures.
Acknowledgments
This work was supported by National Key Research and Development Program of China (2019YFA0705400), National Natural Science Foundation of China (11772153, 22073048), the Natural Science Foundation of Jiangsu Province (BK20190018), the Research Fund of State Key Laboratory of Mechanics and Control of Mechanical Structures (MCMS-E-0420K01), the Fundamental Research Funds for the Central Universities (NJ2020003, NZ2020001), and a Project by the Priority Academic Program Development of Jiangsu Higher Education Institutions. We thank Dr. Shaobao Liu in NUAA for helping measure the mechanical properties of cellulose membranes.
Disclosure statement
No potential conflict of interest was reported by the authors.
References
- Melly SK, Liu L, Liu Y, et al. Active composites based on shape memory polymers: overview, fabrication methods, applications, and future prospects. J Mater Sci. 2020;55(25):10975–11051.
- Herath M, Epaarachchi J, Islam M, et al. Remote actuation of light activated shape memory polymers via D-shaped optical fibres. Smart Mater Struct. 2020;29(4):047001.
- Li Y, Zhang F, Liu Y, et al. 4D printed shape memory polymers and their structures for biomedical applications. Sci China Technol Sci. 2020;63(4):545–560.
- Zhou J. Tailoring geometric phases of two-dimensional functional materials under light: a brief review. Int J Smart Nano Mater. 2020;11(3):191–206.
- Zhang Y, Zhou S, Zhang L, et al. Pre-stretched double network polymer films based on agarose and polyacrylamide with sensitive humidity-responsive deformation, shape memory, and self-healing properties. Macromol Chem Phys. 2020;221(5):1900518.
- Zhang Z, Li X, Yin J, et al. Emerging hydrovoltaic technology. Nat Nanotechnol. 2018;13(12):1109–1119.
- Hua A, Xue Y, Liu R, et al. Thermo-breathing vibration of carbon nanoscrolls. J Appl Phys. 2019;126(1):014301.
- Guo C, Lu J, Tian Z, et al. Optimization of critical parameters of PEM fuel cell using TLBO-DE based on Elman neural network. Energy Convers. Manag. 2019;183:149–158.
- Rüggeberg M, Burgert I. Bio-inspired wooden actuators for large scale applications. PLoS One. 2015;10(4):e0120718.
- Cheng H, Hu Y, Zhao F, et al. Moisture-activated torsional graphene-fiber motor. Adv Mater. 2014;26(18):2909–2913.
- Cheng H, Liu J, Zhao Y, et al. Graphene fibers with predetermined deformation as moisture-triggered actuators and robots. Angew Chem Int Ed. 2013;52(40):10482–10486.
- Huang Y, Cheng H, Yang C, et al. All-region-applicable, continuous power supply of graphene oxide composite. Energy Environ Sci. 2019;12(6):1848–1856.
- Yang C, Huang Y, Cheng H, et al. Rollable, stretchable, and reconfigurable graphene hygroelectric generators. Adv Mater. 2019;31(2):1805705.
- Guo Z, Xu J, Chen Y, et al. High-sensitive and stretchable resistive strain gauges: parametric design and DIW fabrication. Compos Struct. 2019;223:110955.
- Arazoe H, Miyajima D, Akaike K, et al. An autonomous actuator driven by fluctuations in ambient humidity. Nat Mater. 2016;15(10):1084-+.
- Amjadi M, Sitti M. High-performance multiresponsive paper actuators. ACS Nano. 2016;10(11):10202–10210.
- Luo H, Li Z, Yi G, et al. Multi-stimuli responsive carbon nanotube–shape memory polymeric composites. Mater Lett. 2014;137:385–388.
- Zhou H, Luo H, Yao Y, et al. Low-voltage-triggered rapid shape memory actuation with interfacial self-assembled silver nanowires. Mater Lett. 2019;256:76–79.
- Wang S, Yan S, Zhang L, et al. Bioinspired poly(vinyl alcohol) film actuator powered by water evaporation under ambient conditions. Macromol Mater Eng. 2020;305(6):2000145.
- Zhang W, Chen J, Li X, et al. Liquid metal-polymer microlattice metamaterials with high fracture toughness and damage recoverability. Small. 2020;16(46):2004190.
- Zhou J, Wu C, Wu D, et al. Humidity-sensitive polymer xerogel actuators prepared by biaxial pre-stretching and drying. ChemComm. 2018;54(82):11610–11613.
- Zhu Q, Liu S, Sun J, et al. Stimuli-responsive cellulose nanomaterials for smart applications. Carbohydr Polym. 2020;235:115933.
- Zhu Y, Zhang J, Wu Q, et al. Three-dimensional programmable, reconfigurable, and recyclable biomass soft actuators enabled by designing an inverse OpalMimetic structure with exchangeable interfacial crosslinks. ACS Appl Mater Interfaces. 2020;12(13):15757–15764.
- Zhao Z, Hwang Y, Yang Y, et al. Actuation and locomotion driven by moisture in paper made with natural pollen. P Natl Acad Sci USA. 2020;117(16):8711–8718.
- Wei Y, Li S, Zhang X, et al. Smart devices based on the soft actuator with nafion-polypropylene-PDMS/graphite multilayer structure. Appl Sci-basel. 2020;10(5):1829.
- Zhu M, Song J, Li T, et al. Highly anisotropic, highly transparent wood composites. Adv Mater. 2016;28(26):5181.
- Mi R, Chen C, Keplinger T, et al. Scalable aesthetic transparent wood for energy efficient buildings. Nat Commun. 2020;11(1):3836.
- Song J, Chen C, Zhu S, et al. Processing bulk natural wood into a high-performance structural material. Nature. 2018;554(7691):224.
- Li T, Li SX, Kong W, et al. A nanofluidic ion regulation membrane with aligned cellulose nanofibers. Sci Adv. 2019;5(2):eaau4238.
- Zhou X, Zhang W, Zhang C, et al. Harvesting electricity from water evaporation through micro-channels of natural wood. ACS Appl Mater Interfaces. 2020;12(9):11232–11239.
- Li T, Liu Z, Briber RM, et al. Cellulose ionic conductors with high differential thermal voltage for low-grade heat harvesting. Nat Mater. 2019;18(6):608.
- Xue G, Xu Y, Ding T, et al. Water-evaporation-induced electricity with nanostructured carbon materials. Nat Nanotechnol. 2017;12(4):317–321.
- Ma M, Guo L, Anderson DG, et al. Bio-inspired polymer composite actuator and generator driven by water gradients. Science. 2013;339(6116):186–189.
- Wang M, Tian X, Ras RHA, et al. Sensitive humidity-driven reversible and bidirectional bending of nanocellulose thin films as bio-inspired actuation. Adv Mater Interfaces. 2015;2(7):1500080.
- Arnold M. Effect of moisture on the bending properties of thermally modified beech and spruce. J Mater Sci. 2010;45(3):669–680.
- Tancredi N. Thermal studies of wood impregnated with ZnCl2. Eur J Wood Prod. 2017;75(4):633–638.
- Neto RDA, Lima JT, Takarada LM, et al. Effect of thermal treatment on fiber morphology in wood pyrolysis. Wood Sci Technol. 2021;55(1):95–108.
- Saravanakumar K, Mariadoss AVA, Sathiyaseelan A, et al. Synthesis and characterization of nano-chitosan capped gold nanoparticles with multifunctional bioactive properties. Int J Biol Macromol. 2020;165(Pt A):747–757.
- Gao F, Zhang N, Fang X, et al. Magnetically directed soft actuators driven by moisture. J Mater Chem C. 2017;5(17):4129–4133.
- Chen Q, Yan X, Lu H, et al. Programmable polymer actuators perform continuous helical motions driven by moisture. ACS Appl Mater Interfaces. 2019;11(22):20473–20481.