
Abstract
The mixed performance control problem of drum-boiler systems is discussed and investigated in this paper, subject to H2 and passivity performances. In order to minimize output energy and guarantee asymptotical stability, an H2 control scheme is employed to solve the stability problem of system. Passivity theory is applied to achieve disturbance attenuation performance. Based on the Lyapunov function, some sufficient conditions are derived into linear matrix inequality (LMI) form to apply a convex optimization algorithm. Based on the derived sufficient conditions, the asymptotical stability and mixed H2/Passivity performance of the system is achieved by the designed controller. Finally, some simulation results are proposed for a drum-boiler system with external disturbance in order to verify the validity and effectiveness of the proposed design method.
1. Introduction
In many power generation industries, steam is widely used to drive machines and maintain the required working temperatures. Therefore, boilers are both effective and essential in terms of producing high-quality steam. Boilers also play an important role not only in feeding steam but also in generating power on board ships. Thus, the stabilization of boiler systems is an important matter that is worthy of investigation. In Åström and Zcklund (Citation1972) and Abdeldjebar and Khier (Citation2007), the mathematical dynamic equations of drum-boilers were identified using mathematical modelling technology. Many attempts have been made using the proposed stability criteria to find a suitable controller such that a closed-loop boiler system is rendered stable (Pellegrinetti & Bentsman Citation1996; Moon & Lee Citation2009; Ku et al. Citation2010a, Citation2010b). Ku et al. (2010) designed a passive controller to deal with the stability analysis and synthesis of boiler systems, but without considering the initial conditions and with minimal system energy. However, in practical operation, the initial conditions must be taken into account, and minimizing the system energy is also a concern, as it could lead to an interruption in operation. Hence, it is necessary for marine engineers to further explore the multiple performance issues of boilers systems and their methods of control.
In the recent years, mixed performance control techniques have been widely and successfully implemented for control systems (Nobuyama & Khargonekar Citation1995; Chen et al. Citation2000; Karimi & Gao Citation2008; Huang et al. Citation2011). Mixed performance control technology has been studied by combining the and
control schemes to propose the mixed
performance design method. With mixed performance control, the
control scheme (Dragan et al. Citation2004; Dragan Citation2005; Georgiev & Tilbury Citation2006; Ma & Chen Citation2006) focuses on minimizing the system energy based on the initial conditions. Also, the stability of systems can be guaranteed under the determined initial conditions. Another mixed performance design method which is often used is
performance (Zhang et al. Citation2005; Berman & Shaked Citation2006; Gérard et al. Citation2010), which is employed to deal with the disturbance rejection of the system; the stability of systems with a disturbance effect can be achieved by using a mixed
performance controller. Based on those two control schemes, system stability is the main aim. However, the
control scheme is not a general description for expressing the energy change between the system and disturbance. For the
control scheme, the constraint of disturbance is only established by the ratio between the system state and its disturbance. In order to extend generality and flexibility, passivity theory (Lozano et al. Citation2000) is applied in this paper to substitute the
control scheme in the mixed performance design method for a discussion of the energy change between the system and external disturbance.
Passivity theory (Lozano et al. Citation2000; Willems & Trentrlman Citation2002a, Citation2002b) is proposed to ensure that if the system is passive then the energy in the system always dissipates or stories with time. The disturbance attenuation performance (Mahmoud & Zribi Citation2002; Li et al. Citation2009; Ku et al. Citation2010a, Citation2010b) of a system can be investigated and researched using passivity theory. Moreover, a power supply rate function (Lozano et al. Citation2000) in passivity theory is the key point for deciding the disturbance constraints of a system. By changing the power supply rate function, the disturbance attenuation performance of a system can be modified in under several schemes, including the control scheme, the
control scheme, positive real theory and different passivity schemes. Thus, passivity theory is more general and flexible than the
control scheme in terms of discussing the energy change between a system and external disturbance. Therefore, the mixed performance design method in this paper is considered for designing a mixed
performance controller.
Motivated by the performance issues outlined above, in this paper a mixed performance controller design method is proposed for the drum-boiler system. According to passivity theory, the proposed design method can be reduced to the existing mixed performance control technology. Furthermore, in comparison with Mahmoud and Zribi (Citation2002), not only passivity constraint but also minimum output energy are all achieved by the proposed design method. Therefore, the proposed design method is more general and flexible than the existing mixed performance control technology and that of Mahmoud and Zribi (Citation2002). Because the drum-boiler system is a strictly nonlinear system, the linearization approach (Teixeira & Żak Citation1999) is applied to obtain the linear system of the boiler, after which some sufficient conditions are derived via the Lyapunov function in order to achieve the performance constraints. In order to apply a convex optimization algorithm (Boyd et al. Citation1994), the derived conditions are converted into linear matrix inequality (LMI) forms, after which the feasible solutions are obtained for designing a mixed
performance controller. Through the designed controller, the asymptotical stability of a closed-loop boiler system can be guaranteed from its initial conditions and with minimized output energy. The attenuation performance of the system is achieved via satisfying the constraint defined by passivity theory. Thus, the asymptotical stability and passivity of a drum-boiler system driven by the designed controller are achieved and guaranteed. Finally, some simulation results are presented in order to demonstrate the effectiveness and usefulness of the proposed mixed
performance controller design method.
2. Drum-boiler system structure and problems statement
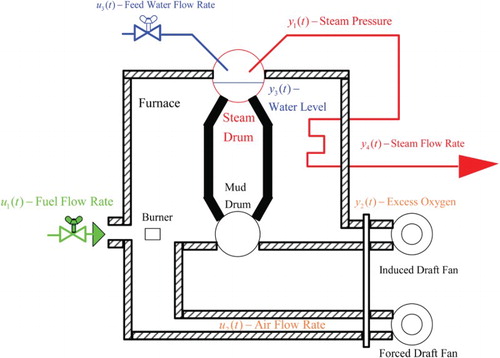
In this section, the linearization technique (Teixeira & Żak Citation1999) is employed to obtain the relevant linear system, which is proposed to express the local dynamics of the drum-boiler system around the chosen equilibrium point. From , the main process of a nonlinear drum-boiler system is displayed in terms of the relations of the inputs and outputs. Moreover, the measured drum pressure, excess oxygen level, drum water level and steam flow rate are measured outputs of interest that provide data for engineers. On the other hand, the control inputs are considered as the fuel flow, air flow and feed water rates required to maintain smooth outputs and system safety through sensing the steam pressure, actual fuel rate, drum water level, actual feed water flow rate, steam flow rate, steam temperature, actual air flow rate and oxygen level in the flue gas. The original nonlinear dynamic equation of a drum-boiler system is as follows (Nobuyama & Khargonekar Citation1995; Abdeldjebar & Khier Citation2007):
(1a)
(1b)
(1c)
(1d)
(2a)
(2b)
(2c)
(2d) where:
is the drum pressure state (
);
is the excess oxygen level (%);
is the system fluid density (
);
is the exogenous variable related to the load disturbance intensity (0–1);
,
,
and
are the measured outputs for the drum pressure (PSI), excess oxygen level (%), drum water level (in) and steam flow rate (kg/s), respectively;
,
and
are the fuel, air and feed water level rate inputs, respectively, which take values between 0 and 1; and
is the external disturbance input. In order to obtain the linear system, the equilibrium point of Equation (1) is determined such that
(3)
According to Equation (3), the states of Equations (1) and (2) can be shifted such that the new equilibrium points of the drum-boiler system are stated on origin. Thus, the following new states and inputs can be obtained:
(4)
Figure 1. Industrial steam boiler.
According to Equation (4), new dynamic equations can be rewritten as follows:
(5a)
(5b)
(5c)
(5d)
Furthermore, by setting , the Teixeira-Zak's linearization technique is applied to obtain the following linear system from Equation (5) with the equilibrium point as
.
(6) where
In addition, the following two outputs are presented:
(7a)
(7b) where
is the performance output vector,
is the controlled output vector, and the corresponding matrices are proposed as follows:
In this paper, state feedback design technology is concerned with stabilizing Equation (1). Thus, the controller is structured as follows:
(8) where
is the gain matrix which needed to be found. Therefore, the closed-loop system can be obtained by substituting Equation (8) into Equations (6) and (7b):
(9a)
(9b)
(9c) where
and
.
The closed-loop system (Equation (9a)) is considered as deriving the sufficient conditions. Thus, through the designed controller (Equation (8)), the mixed performance of Equation (1) can be achieved and guaranteed. Therefore, the following definitions are proposed to describe passivity theory and
performance. With the energy concept, the following definition can be proposed as following for illustrating passivity properties.
Definition 1
(Lozano et al. Citation2000).
If there exist known constant matrices ,
and
for satisfying the following inequality, then the system is called passive with the external disturbance
and performance output
for all terminal time
.
(10) When setting the constant matrices
,
and
, inequality (Equation (10)) can be rewritten as several constraints. #
When the disturbance input is 0 , the
performance is considered as guaranteeing the asymptotical stability of the system with the nonzero initial condition
. Moreover, the output energy can be constrained via the
performance, which is presented in the following definition.
Definition 2
(Dragan Citation2005).
The performance measure of the system (Equation (9)) is defined as follows:
(11) This Definition 2 can be the so-called problem of minimizing the output energy based on
. #
According to the above definitions, some sufficient conditions can be derived via the Lyapunov function, which are then employed to analyse and synthesize the stability of the closed-loop system (Equation (9)). Thus, the sufficient conditions are derived in the following section.
3. Mixed performance controller design method
In this section, the sufficient conditions are derived to guarantee the asymptotical stability and mixed performance of the closed-loop system (Equation (9)). For applying the convex optimization algorithm, the sufficient conditions are converted into LMI form. The LMI sufficient conditions can be directly solved via the algorithm for finding the feasible solutions, including the feedback gain matrix. With the gain matrix, the controller (Equation (8)) can be designed to stabilize the closed-loop system.
Theorem 1.
Given the matrices ,
and
, if one can find the positive definite matrices
and feedback gain
to satisfy the following conditions when minimizing
, then the mixed
performance of the closed-loop system (Equation (9)) is achieved:
(12a)
(12b)
(12c)
Proof
First, the following Lyapunov function is chosen:
(13)
Taking the derivative of the Lyapunov function (Equation (13)) yields
(14)
Substituting Equation (9a) into Equation (14), one has
(15)
Let us define the following cost function:
(16) where
(17)
Substituting Equations (9b) and (15) into Equation (17), one has
(18) where
(19)
If Condition (12a) holds, then one can obtain , which implies
from Equation (18). From Equation (16),
can be found due to
. Thus, the following inequality can be obtained:
(20)
Because Equation (20) is equivalent to Equation (10), the closed-loop system (Equation (9)) is passive. Next, it is necessary to show that the system is asymptotically stable. Let us assume that ; then, the following equation can be obtained from Equation (15):
(21)
Furthermore, the following relation can be derived with Equation (9c):
(22)
Thus, if Condition (12b) holds, then is easily found from Equation (22). According to
, the closed-loop system (Equation (9)) is asymptotically stable, with zero external disturbance. On the other hand, the following equation can be obtained by rearranging the first part of Equation (22):
(23)
Because Condition (12b) holds, one has the following inequality from Equation (23):
(24)
or
(25)
By integrating both sides of Inequality (25) from 0 to , we have
(26)
Because the closed-loop system (Equation (9)) is asymptotically stable, i.e., as
, one has
(27)
From Equation (27), is the upper bound of
performance as defined in Definition 2. If Condition (12c) holds, the following relations can be obtained to further determine the upper bound of
performance:
(28) or
(29)
Due to Equations (27) and (29), one has
(30)
Thus, through minimizing the scalar , one can find the minimum output energy with the initial conditions and matrix
for guaranteeing the asymptotical stability of system. The proof of Theorem 1 is thus completed. #
However, the conditions of Theorem 1 belong to bilinear matrix inequality problems that cannot be directly calculated by a convex optimization algorithm. For this reason, the LMI sufficient conditions are obtained from Equation (12) in the following theorem.
Theorem 2.
Given the matrices ,
, and
, if there exist positive definite matrices
and feedback gain
to satisfy the following conditions when minimizing
, then the mixed
performance of the closed-loop system (Equation (9)) is achieved:
(31a)
(31b)
(31c) where
and
.
Proof
Multiplying both sides of Equation (12a) by , one has
(32)
Using the Schur complement (Boyd et al. Citation1994), Equation (32) becomes
(33)
Substituting into Equation (33), and setting
and
, one has
(34)
By using the Schur complement, Equation (12b) becomes
(35) where
.
Multiplying both sides of Equation (35) by , the following inequality can be obtained via applying
and
:
(36)
Using the Schur complement, Equation (12c) becomes
(37)
Setting , one has
(38)
Using the Schur complement and setting the variables, i.e., and
, Equations (34), (36) and (38) can be obtained from Equation (12) in Theorem 1, and Equations (34), (36) and (38) are equivalent to the conditions of Theorem 2. Thus, if the feasible solutions of Theorem 2 can be obtained then the obtained feasible solutions can also satisfy the conditions of Theorem 1. Thus the proof of Theorem 2 is completed. #
Based on the LMI conditions of Theorem 2, feasible solutions can be directly obtained by using the MATLAB LMI Toolbox; thus, the controller (Equation (8)) can be designed by solving the LMI conditions (Equation (31)) for guaranteeing the mixed performance of the closed-loop system (Equation (9)).
4. Simulation results
The closed-loop system (Equation (9)) is considered in this section for designing a mixed performance controller for stabilizing a drum-boiler system (Equation (1)). Through solving the sufficient conditions in Theorem 2, feasible solutions can be obtained. For applying the proposed design method, the matrices
,
and
and the initial condition
are chosen. Using the MATLAB LMI Toolbox, one can find the following feasible solutions:
(39)
According to Theorem 2, the feasible solutions (Equation (39)) can also satisfy the sufficient conditions in Theorem 1. Thus, one can find that the asymptotical stability and passivity of the closed-loop system (Equation (9)) can be achieved via the designed controller (Equation (8)). Through choosing the external disturbance as zero-mean white noise with a 0.2 variance, the responses of the drum-boiler system (Equation (1)) using the designed controller are given in Figures –.
Figure 2. Response of the measured drum pressure .
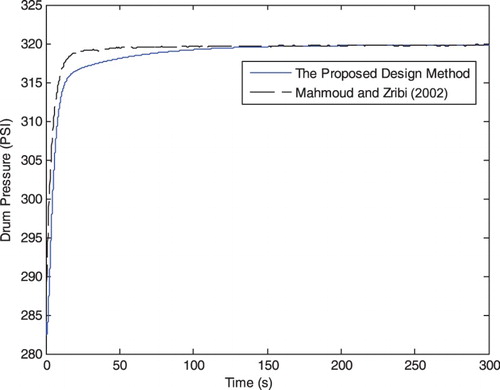
Figure 3. Response of the excess oxygen level .
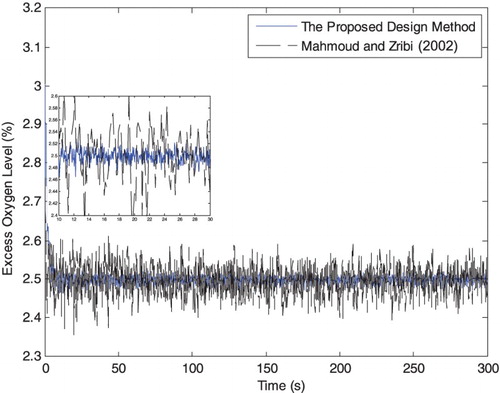
Figure 4. Response of the drum water level .
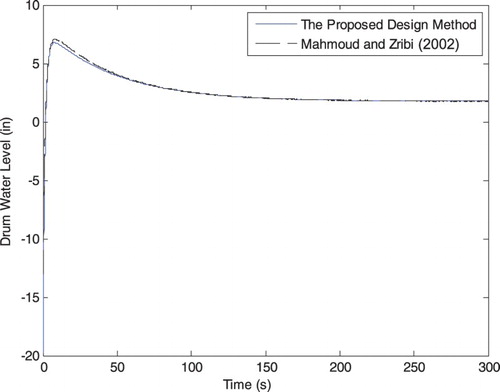
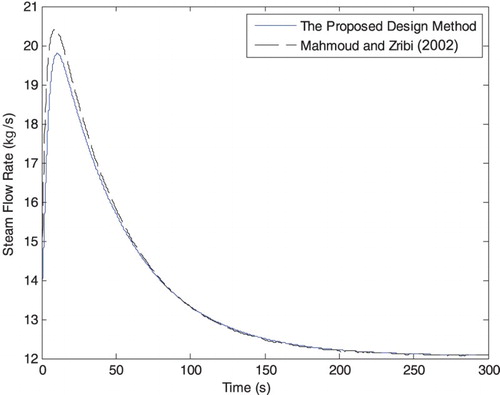
Figure 5. Response of the steam flow rate .
From the responses shown in Figures –, the drum pressure is stabilized on 320 PSI. The excess oxygen level
is kept near 2.5% with some vibrations. The vibrations are caused by the added external disturbance
, which simulates the bad operating environment of ship. From the responses, one can find that the disturbance effect on the system is constrained via the designed controller. Thus, from Figures and 3, a good control accuracy for the drum pressure and excess oxygen level is achieved in a short time. Furthermore, the drum water level and steam flow rate are controlled over a long period of time for convergence. The result is that the rate of feed water is limited in one. However, the responses of the drum water level and steam flow rate are also stabilized on the argument points during the simulation time. Furthermore, the following equations are proposed to demonstrate that the system performance is achieved:
(40a)
(40b)
Obviously, the ratio value of Equation (40a) is smaller than one that satisfies Definition 1. Thus, the passivity of the drum-boiler system is achieved by the designed controller. Besides, the value of Equation (40b) is smaller than the obtained which means that the output energy of the drum-boiler system is limited; thus, the
performance of Equation (1) is achieved. Also, one can find that the asymptotical stability of Equation (1) is guaranteed with the decided initial conditions from . With the above illustrations, the mixed
performance of the drum-boiler system is achieved via the designed controller.
In order to emphasize the contribution of this paper, a design method proposed by Mahmoud and Zribi (Citation2002) is employed to control the same boiler system (Equation (1)). In Mahmoud and Zribi (Citation2002), the passivity control problem was discussed without considering the performance. Therefore, one can apply the same matrices
,
and
to find a feasible solution which satisfies the sufficient condition in Mahmoud and Zribi (Citation2002), after which one has the following controller:
(41) where
Applying Equation (41) to Equation (1), the measured output responses are stated in Figures – with the same initial condition. Based on the simulation results of Equation (1) driven by Equation (41), the following ratios can be obtained:
(42a)
(42b)
It is obvious that Equation (42a) is < 1 and satisfies Definition 1. The passivity of the considered boiler system is achieved by Equation (41). However, from Equation (42b), the output energy of Equation (1) driven by Equation (41) is bigger than the assigned value as . Thus, the
performance of Equation (1) cannot be achieved by Equation (41). Furthermore, from Figures , and , it is clear that the overshoot of Equation (1) driven by Equation (41) is bigger than that driven by the designed controller. From , the vibration of Equation (1) driven by Equation (41) is bigger than that driven by the designed controller. Summarizing the above comparison, the proposed design method proposes a better control performance than that of Mahmoud and Zribi (Citation2002) in controlling the drum-boiler system (Equation (1)).
5. Conclusions
A mixed performance design method for a drum-boiler system has been discussed and proposed in this paper. For presenting a more general and flexible controller design method, the passivity theory was in substitution of the
scheme of the present mixed performance design method. For the proposed design method, the passivity theory was applied to deal with the effect of disturbance on the system. The
control scheme was employed to resolve the minimized output energy and stability issues. Through the
control scheme and the passivity theory, the sufficient conditions were derived using the Lyapunov function. For applying the convex optimization algorithm, the feasible solutions can be obtained to establish a controller such that asymptotical stability and the mixed
performance of drum-boiler system are achieved.
Disclosure statement
No potential conflict of interest was reported by the authors.
ORCID
Cheung-Chieh Ku http://orcid.org/0000-0003-0812-9661
Additional information
Funding
References
- Abdeldjebar B, Khier B. 2007. Modelling, identification for the grade boiler a comparison fuzzy logic, PID and application of overheat steam temperature. Proceeding of International Conference on Control, Automation and Systems. Korea: Seoul, 256–261.
- Åström KJ, Zcklund K. 1972. A simplified nonlinear model of a drum boiler-turbine unit. International Journal of Control. 16:145–169. doi: 10.1080/00207177208932249
- Berman N, Shaked U. 2006. H∞-like control for nonlinear stochastic systems. Systems and Control Letters. 55:247–257. doi: 10.1016/j.sysconle.2005.07.005
- Boyd S, Ghaoui LE, Feron E, Balakrishnan V. 1994. Linear matrix inequalities in system and control theory. Philadelphia, PA: SIAM.
- Chen BS, Tseng CS, Uang HJ. 2000. Mixed H2/H∞ fuzzy output feedback control design for nonlinear dynamic systems: an LMI approach. IEEE Transactions on Fuzzy Systems. 8:249–265. doi: 10.1109/91.855915
- Dragan V. 2005. The linear quadratic optimization problem for a class of singular perturbed stochastic systems. International Journal of Innovative Computing, Information and Control. 1:53–63.
- Dragan V, Morozan T, Stoica A. 2004. H2 optimal control for linear stochastic systems. Automatica. 40:1103–1113. doi: 10.1016/j.automatica.2004.01.023
- Georgiev D, Tilbury DM. 2006. Packet-based control: the H2-optimal solution. Automatica. 42:137–144. doi: 10.1016/j.automatica.2005.08.011
- Gérard B, Ali HS, Zasadzinski M, Darouach M. 2010. H∞ filter for bilinear systems using LPV approach. IEEE Transactions on Automatic Control. 55:1668–1674. doi: 10.1109/TAC.2010.2046075
- Huang H, Li D, Xi Y. 2011. Design and input-to-state practically stable analysis of the mixed H2/H∞ feedback robust model predictive control. IET Control Theory and Applications. 6:499–505.
- Karimi HR, Gao H. 2008. Mixed H2/H∞ output-feedback control of second-order neural systems with time-varying state and input delays. ISA Transactions. 47:311–324. doi: 10.1016/j.isatra.2008.04.002
- Ku CC, Huang PH, Chang WJ. 2010a. Passive fuzzy controller design for nonlinear systems with multiplicative noises. Journal of the Franklin Institute. 347:732–750. doi: 10.1016/j.jfranklin.2010.01.010
- Ku CC, Huang PH, Chang WJ. 2010b. Passive fuzzy controller design for perturbed nonlinear drum-boiler system with multiplicative noise. Journal of Marine Science and Technology. 18:211–220.
- Li Q, Zhang Q, Yi N, Yuan Y. 2009. Robust passive control for uncertain time-delay singular systems. IEEE Transactions on Circuits and Systems-I: Regular Papers. 56:653–663. doi: 10.1109/TCSI.2008.2002663
- Lozano R, Brogliato B, Egeland O, Maschke B. 2000. Dissipative systems analysis and control theory and applications. London: Springer.
- Mahmoud MS, Zribi M. 2002. Passive control synthesis for uncertain systems with multiple-state delays. Computers and Electrical Engineering. 28:195–216. doi: 10.1016/S0045-7906(01)00056-8
- Ma M, Chen H. 2006. Constrained H2 control of active suspensions using LMI optimization. Proceeding of the 25th Chinese Control Conference. China: Harbin.
- Moon UC, Lee KY. 2009. Step-response model development for dynamic matrix control of a drum-type boiler-turbine system. IEEE Transaction on Energy Conversion. 24:423–430. doi: 10.1109/TEC.2009.2015986
- Nobuyama E, Khargonekar PP. 1995. A generalization in mixed H2/H∞ control with state feedback. Systems and Control Letters. 25:289–293. doi: 10.1016/0167-6911(94)00080-F
- Pellegrinetti G, Bentsman J. 1996. Nonlinear control oriented boiler modeling a benchmark problem for controller design. IEEE Transactions on Control Systems Technology. 4:57–64. doi: 10.1109/87.481767
- Teixeira MCM, and Żak SH. 1999. Stabilizing controller design for uncertain nonlinear systems using fuzzy model. IEEE Transactions on Fuzzy Systems. 7:133–142. doi: 10.1109/91.755395
- Willems JC, and Trentrlman HL. 2002a. Synthesis of dissipative systems using quadratic differential forms: part I. IEEE Transactions Automatic Control. 47:53–69. doi: 10.1109/9.981722
- Willems JC, and Trentrlman HL. 2002b. Synthesis of dissipative systems using quadratic differential forms: part II. IEEE Transactions Automatic Control. 47:70–86. doi: 10.1109/9.981722
- Zhang W, Chen BS, Tseng CS. 2005. Robust H∞ filtering for nonlinear stochastic systems. IEEE Transaction on Signal Processing. 53:589–598. doi: 10.1109/TSP.2004.840724