
 ?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.
?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.ABSTRACT
A ship is always under the influence of matched as well mismatched uncertainties and external disturbances owing to its operational environment and, therefore, designing an autopilot that offers uniform performance in the presence of uncertainties and disturbances poses a challenging task. In this work, to address the issue, control design based on adaptive backstepping robustified by Uncertainty and Disturbance Estimator (UDE) is proposed. The design does not need knowledge of bounds of uncertainties and disturbances and is able to effectively deal with the uncertainties and disturbances. Simulation results show that the performance of the backstepping autopilot is enhanced by combining the backstepping design with the UDE approach.
1. Introduction
Marine surface vessels operate in highly uncertain environment that exists at sea and, therefore, effective autopilot on board that performs satisfactorily is of utmost importance as it helps the economy by reducing fuel consumption and manpower, improving safety and security, better machinery maintenance and comfort to the crew. Designing an efficient controller, however, is a challenging task owing to the ship's nonlinear dynamics, parametric variations, external disturbances due to waves, wind and underwater currents, varied sailing conditions, model mismatches, inaccuracies etc. The factors such as input and rate limitation constraints complicate the issue further.
Due to the advancements in automation and microprocessor-based modern control strategies, the urge to improve manoeuvrability performance of ships has caught attention of researchers, resulting in many significant and noteworthy results (McGookin et al. Citation2000; Sheng et al. Citation2006; Rigatos and Tzafestas Citation2006; Fossen and Perez Citation2009; Tao and Jin Citation2012; Li and Sun Citation2012; Lee et al. Citation2013; Xia et al. Citation2014; Yao et al. Citation2014; Das and Talole Citation2016a, Citation2016b; Das and Talole Citation2018). Backstepping, a well-known recursive methodology, represents one viable technique that can be used for the design of the ship autopilot controller (Fossen and Strand Citation1999b; Marquez Citation2003; Zhou and Wen Citation2008). The approach has received a lot of attention during the last few decades and the application of the technique in diverse areas including in the field of the marine vessel autopilot design have appeared in the literature. For example, in Witkowska and Smierzchalski (Citation2009), nonlinear control structure obtained in the backstepping method is optimised by means of the genetic algorithm. Adaptive filtering backstepping for the ship steering problem is demonstrated in Xia et al. (Citation2014) and its use in the presence of input saturation due to steering gear is presented in Witkowska et al. (Citation2007) and Li et al. (Citation2011). Adaptive filtering Backstepping Neural Network (ABNN) for uncertain nonlinear system is implemented for the autopilot design in order to solve the stability problem, convergence error and robustness in Meziou et al. (Citation2011). In Fossen and Grovlen (Citation1998), observer backstepping is used for designing nonlinear output feedback control for dynamic positioning of ship. In Do et al. (Citation2002), the development of controller based on Lyapunov's direct method and the backstepping technique is demonstrated.
Numerous research can be cited over the last decade wherein conventional backstepping controllers have been combined with some other approaches. These techniques are aimed towards achieving better performance of the controller. The performance of the conventional backstepping controllers in the presence of uncertainty and disturbances has been found to improve by augmenting it with some appropriate method. One such example of a similar approach as mentioned above is the augmenting backstepping controller with the help of Uncertainty and Disturbances estimation. In Hwang and Tahk (Citation2006), a study on the integrated backstepping design of missile guidance and control was demonstrated by combining it with the robust disturbance observer. Similarly, in Ji et al. (Citation2012), a study on robust adaptive backstepping synchronisation for a class of uncertain chaotic systems was implemented by combining with the fuzzy disturbance observer. Extended State Observer (ESO) was used in conjunction with backstepping for nonlinear robust control of hydraulic systems in Ji et al. (Citation2012). Control of the nonlinear system with multiple mismatched disturbances by using the composite technique of the backstepping controller with adaptive disturbance observer was used in Suna and Guoa (Citation2014). In all of these attempts, it has been demonstrated in their respective work that the backstepping controller is robustified by integrating it with a suitable methodology.
Following a similar approach, in Das (Citation2015), an Uncertainty and Disturbance Estimation UDE) (Zhong and Rees Citation2004) approach is used in conjunction with the backstepping controller to improve the performance of the backstepping controller designed for ship steering autopilot. In their work, the authors have shown that the UDE technique is quite effective in tackling the problem of uncertainties and disturbances without having any specific information about the same. The work, however, considers the ship model with servo dynamics in the phase variable form making the uncertainties and disturbances as matched one. In this work, the issue is addressed by using a more practical model wherein the disturbances are mismatched. For the mismatched dynamics, an adaptive backstepping controller is designed and the UDE technique is used to robustify the same. Comparison of the backstepping controller is carried out with the UDE augmented backstepping controller and it is shown that the UDE approach results in noticeable improved performance. The remaining paper is organised as follows: in Section 2, the mathematical model including the rudder steering system are presented. The design of the nonlinear controller based on e stepping approach is presented in Section 3 followed by the construction of a UDE-based backstepping controller in Section 4. Closed-loop stability analysis is presented in Section 5 whereas simulation results are presented in Section 6. Lastly, Section 7 concludes this work.
2. Mathematical model
The dynamic characteristic describing the ship's motion is given by Nomoto's first-order model as (Nomoto et al. Citation1957)
(1)
(1) where r is the yaw rate, δ is the actual rudder deflection, and T and K are the time constant and gain parameters, respectively. Noting
, the corresponding transfer function relating to the yaw angle, ψ, to rudder movement is given as
(2)
(2) which when written in the form of differential equation gives
(3)
(3) The model of Nomoto (Equation3
(3)
(3) ) is suitable for a small rudder angle and does not account for nonlinearity. A nonlinear model as proposed by Norbin (H. Citation1963; Amerongen Citation1984) addressing the effect of course instability as well as a large rudder angle is widely used in the literature. Accordingly, the nominal model (Equation3
(3)
(3) ) is modified wherein the heading angle rate,
, is given by a nonlinear function
. Hence, the modified nonlinear model takes the form as
(4)
(4) where
describes the nonlinear manoeuvring characteristic produced by Norbin's reverse manoeuvre and the shape of the curve of
is found by the spiral test. The expression is given by the following function (Amerongen Citation1982; Witkowska et al. Citation2007):
(5)
(5) For a course stable ship, the value
and for the course unstable ship
takes the value of
. The quantity
is considered as an additional rudder offset and becomes non-zero only when the ship's hull is asymmetric or the ship is propelled by a single screw propeller. For the ship considered in this work,
. On a similar line, symmetry in the hull is considered for almost all the ship design and implies
. Therefore,
can be expressed as
(6)
(6) The movement of the rudder is controlled by the steering machine and the rate at which the rudder moves depends mainly on the speed of the steering pump and the opening of its discharge valve. The hydraulic fluid flow is controlled by the movement of the swash plate, governed by the telemotor system. Due to this limitation of the hydraulic steering pump, the rudder remains as a low bandwidth actuation device. In addition to rate saturation, it also has magnitude limitation. Attributable to these hard nonlinearities like saturation (SAT) limit and slew rate limit (SRL), rudder dynamics should be integrated in the controller design. In few of the earlier works (Cheng Citation2002, Citation2004; Lei and Guo Citation2015), the effect of steering dynamics is considered as time delay. In this work, the servo dynamics has been considered in the plant model used in controller design. The dynamics is given as (Amerongen Citation1984)
(7)
(7) where
and
represent the commanded rudder angle and steering machine time constant, respectively, whereas, sat(·)=sign(·)min(
,
). The typical values of saturation and slew rate limitations are
and
(deg/s), respectively. Since the gain of the transfer function as shown in rudder dynamics is of unity value, it follows that if
,
then
,
. In view of this limitation, stalling of rudder, large control gain cannot solve the stability problem of a vessel due to inadequate rudder (Triantafyllou and Hover Citation2003). Accordingly, assuming that
, rudder dynamics can be treated linear as
(8)
(8) Defining the state variables as
,
,
and input
, the plant model is obtained as
(9)
(9) where
and
are the bandwidths corresponding to the ship and actuator, respectively. Further,
represents the effect of parametric uncertainties, external disturbances, plant nonlinearities, and model inaccuracies, whereas
represents the effect of uncertainties and disturbances appearing in the plant through the input channel. It is worth to note that the disturbance
is mismatched.
3. Backstepping controller
The objective of good autopilot controller design for marine vessel lies in its ability to maintain and change the ship's course by controlling the movement of the rudder without compromising mechanical limitations imposed by the actuating mechanism in the presence of all the environmental disturbances (Triantafyllou and Hover Citation2003). The backstepping control strategy represents one of the most researched techniques that can be used to deal with mismatched uncertainties. Hence, its usage in the design of the ship autopilot controller has been explored numerous times facilitated by combining the backstepping controller with other design strategies. Backstepping is a recursive methodology which designs the controller in a systematic stepwise manner by breaking the actual control into smaller parts called virtual controls. It breaks down the problem into a number of lower-order control problems and a control law is recursively constructed. The conventional backstepping method involves the use of a positive definite function to construct the virtual and actual controls. In this work, the adaptive backstepping (ABS) design is employed wherein the control laws are recursively designed using input–output linearisation (IOL) theory (Slotine and Li Citation1991).
3.1. Controller design
The controller is designed using the nominal plant of (Equation9(9)
(9) ); however, in simulations, the actual plant composed of (Equation4
(4)
(4) ) and (Equation7
(7)
(7) ) with all the limitations imposed by the actuator is used. As mentioned in the previous section, the controller is an IOL-based ABS controller, i.e. it amalgamates the concept of the IOL-based feedback law in designing each step of the control law design of ABS as described below.
Considering the outermost loop variable
, let the error variable pertaining to this loop be
Now considering the loop corresponding to variable
Lastly, arriving at the innermost loop, the error variable corresponding to this loop is
where, ,
, and
are the controller gains. Upon implementing the designed controller, the closed-loop system becomes
(13)
(13)
4. UDE-based backstepping
As stated earlier, the backstepping design is augmented by using the UDE technique for designing robust control law for ship autopilot. The UDE enables the estimation of the effect of uncertainties and disturbances acting on the system and the estimate is used to augment the backstepping controller designed for a nominal system.
Concept of UDE: Consider a first-order dynamical system as
(14)
(14) where
represents the parametric uncertainty,
is the control input and
represents the unknown external disturbance acting on the system. Defining the total disturbance as
, the control law is designed as
, where
is the estimate of d. By following the UDE theory (Zhong and Rees Citation2004; Kuperman et al. Citation2010), the disturbance is estimated as
(15)
(15) where the term
represents control law designed for the nominal system, i.e. for the plant without any uncertainties or disturbances and
is an appropriately chosen low pass filter of steady state gain of unity and wide enough bandwidth. In this work, the low pass filter as
with time constant of τ is used for disturbance estimation.
4.1. UDE-based controller
In order to design the controller using UDE, the steps are similar to those discussed in Section 3.1 except that the disturbance estimate terms, , are taken into consideration. This leads to the following control strategy development
(16)
(16) where
and
are the estimates of the actual disturbances
and
, respectively, appearing in the plant dynamics (Equation9
(9)
(9) ). The resulting closed-loop dynamics can be obtained as
(17)
(17) Now using (Equation15
(15)
(15) ), (Equation16
(16)
(16) ) and (Equation17
(17)
(17) ), the disturbance estimates are obtained as
(18)
(18)
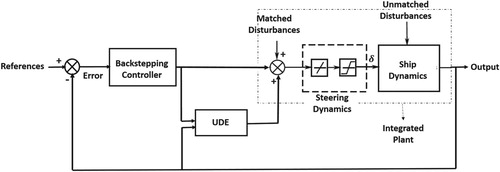
The schematic diagram of the UDE based controller is shown in Figure
Figure 1. Schematic block diagram of UDE-based backstepping controller.
5. Closed-loop stability
For closed-loop stability analysis, new tracking error variables for states are defined as with
denoting the reference
and the disturbance estimation error is defined as
. Now, from the UDE filter transfer function, one has (Talole et al. Citation2007, Citation2011; Kolhe et al. Citation2013)
(19)
(19) With reference to (Equation16
(16)
(16) ), (Equation17
(17)
(17) ) and (Equation19
(19)
(19) ), the closed-loop error dynamics can be obtained as
(20)
(20) where
and
From (Equation20
(20)
(20) ), it can be observed that the system matrix of the error dynamics is in a block-triangular form; thus, giving the characteristic equation as
(21)
(21) Clearly, stability for the closed-loop dynamics can be ensured through a proper choice of the controller gains and filter time constant. It can also be observed that the ABS controller gain and the UDE filter constants can be independently designed to suffice the design requirements. Another aspect is related to the rate of change of actual disturbance,
, acting on the system which can be neglected if the disturbance is slow varying with respect to the plant dynamics. However, for highly dynamic disturbances, a higher order filter can be used to mitigate its effect on the system performance (Talole and Phadke Citation2009).
6. Simulations and results
Simulations are carried out by using the UDE-based backstepping controller (Equation16(16)
(16) ) with the disturbance estimates given by (Equation18
(18)
(18) ) on the actual plant consisting of (Equation4
(4)
(4) ) and (Equation7
(7)
(7) ) and the yaw attitude profile tracking performance is evaluated in the presence of external disturbances. The simulation work has been experimented with the help of Matlab software. The performance of the UDE-based backstepping controller is compared with the backstepping controller of (Equation12
(12)
(12) ) to verify the benefits of UDE. The parameters of the ship steering model are taken from Fossen (Citation1994) wherein the time constant, T, and gain, K, are taken as 29 and 0.35, respectively. The values of
and
are taken as 1 and 0.2378, respectively, which correspond to the dynamics of a ship travelling at 16 knots, i.e. 8.2 m/s (Amerongen Citation1982). Simulations are carried out by considering a step input wherein the reference yaw angle is taken as
. The reference command is passed through a first-order filter of time constant 0.01 for smoothening the reference (Theodoulis and Duc Citation2009). In the present work, to demonstrate the effectiveness of the proposed design, two types of disturbances are considered (Li and Sun Citation2012). The disturbance
is taken as a sinusoidal function given by
which mimics the first-order and second-order wave disturbances and
is taken as
. It may be noted that
represents the mismatched uncertainty, whereas
is the matched uncertainty. The heading of a vessel is measured by a gyro compass, the accuracy of which is typically of 0.1 degree. Accordingly, the yaw angle measurement is assumed to be corrupted by zero mean Gaussian white noise (Fossen and Grovlen Citation1998; Fossen and Strand Citation1999a; Rigatos and Tzafestas Citation2006; Fossen and Perez Citation2009).
Simulations are carried out using only backstepping controller () and the UDE-based backstepping controller (
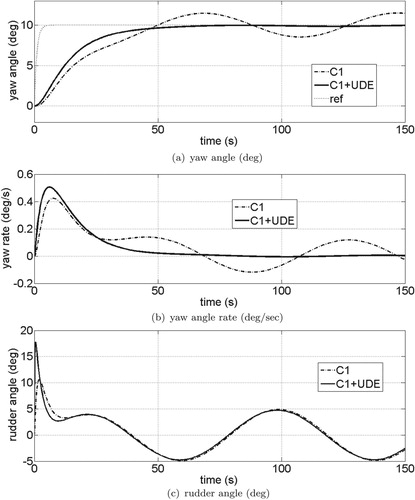
) and their performances are compared. In Figure , the simulation results of the controllers without the effect of any external disturbances are presented and it can be seen that both the controllers offer satisfactory results in the absence of disturbances and uncertainties. Next, simulations are carried out using the controllers in the presence of the disturbances and the results are shown in Figure . From the Figure (a), it is seen that the performance of the UDE-based backstepping controller is superior in tracking the yaw angle and the controller is able to track the desired reference accurately notwithstanding the disturbances and uncertainties.
Figure 2. Performance comparison of the backstepping controller (C1) and the UDE-based backstepping controller (C1+UDE) in tracking reference signal (ref) without disturbances and parametric uncertainty. (a) Yaw angle (deg), (b) yaw angle rate (deg/s) and (c) rudder angle (deg).
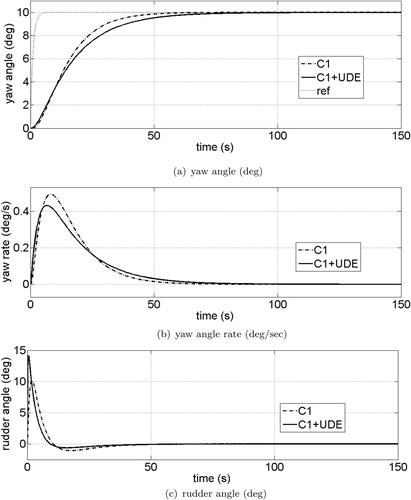
Figure 3. Performance comparison of the backstepping controller (C1) and the UDE-based backstepping controller (C1+UDE) in tracking reference signal (ref) in the presence of disturbances and parametric uncertainty. (a) Yaw angle (deg), (b) yaw angle rate (deg/s) and (c) rudder angle (deg).
The UDE is able to treat the effect of external environmental factors, model uncertainties, parametric variation, nonlinearities, etc., as a total disturbance and estimates them either in the form of matched or mismatched condition. When UDE is augmented with the controller, the estimated value of disturbances is used in the controller designed for the nominal system to compensate for the effects of uncertainty and disturbances. Therefore, in the presence of uncertainty and disturbances, the heading response of the proposed UDE-based controller is effective with the imperfect plant model.
7. Conclusions
In this work, an UDE approach is used to robustify the adaptive backstepping controller design in the presence of matched as well as mismatched disturbances. Closed loop stability of the proposed formulation is established. Numerical simulation results clearly show that the proposed formulation succeeds in robustification of the backstepping controller in spite of significant disturbances.
Disclosure statement
No potential conflict of interest was reported by the authors.
References
- Amerongen JV. 1982. Adaptive steering of ships: a model reference approach to improved manoeuvering and economical course keeping [PhD thesis]. Delft University of Technology, Netherlands.
- Van Amerongen J. 1984. Adaptive steering of ships: a model reference approach. Automatica. 20(1):3–14. doi: 10.1016/0005-1098(84)90060-8
- Cheng WX, Ran W. 2002. Two-degree-of-freedom h∞ control of ship steering. Proceedings of the 4th World Congress on Intelligent Control and Automation; Shanghai, P. R. China. p. 763–767.
- Cheng WX, Ying R. 2004. H∞ control of ship steering. Proceedings of the IEEE Conference on Robotics, Automation and Mechatronics; Singapore. p. 1198–1202.
- Das S, Bhatt A, Talole SE. 2015. UDE based backstepping design for ship autopilot. International Conference on Industrial Instrumentation and Control; Pune, India: College of Engineering Pune. p. 417–422.
- Das S, Talole SE. 2016a. Geso based robust output tracking controller for marine vessels. J Ocean Eng, 121:156–165. doi: 10.1016/j.oceaneng.2016.05.027
- Das S, Talole SE. 2016b. Robust steering autopilot design for marine surface vessels. IEEE J Oceanic Eng. 41(4):913–922. doi: 10.1109/JOE.2016.2518256
- Das S, Talole SE. 2018. Nonlinear control of marine surface vessels. Inst Eng (India). 121:1–16.
- Do KD, Jiang ZP, Pan J. 2002. Underactuated ship global tracking under relaxed conditions. IEEE Trans Automat Contr. 47(9):1529–1536. doi: 10.1109/TAC.2002.802755
- Fossen TI. 1994. Guidance and control of ocean vehicle. New York (NY): Wiley.
- Fossen TI, Grovlen AS. 1998. Nonlinear output feedback control of dynamically positioned ships using vectorial observer backstepping. IEEE Trans Control Syst Technol. 6(1):121–128. doi: 10.1109/87.654882
- Fossen TI, Perez T. 2009. Kalman filtering for positioning and heading control of ships and offshore rigs. IEEE Contr Syst Mag 32–46.
- Fossen TI, Strand JP. 1999a. Passive nonlinear observer design for ships using Lyapunov methods: full scale experiments with supply vessels. Automatica. 35:3–16. doi: 10.1016/S0005-1098(98)00121-6
- Fossen TI, Strand JP. 1999b. Tutorial on nonlinear backstepping: application to ship control. Model Ident Contr. 20(2):83–134. doi: 10.4173/mic.1999.2.3
- H NN. 1963. On the design and analysis of Zig-Zag test on base of Quasi Linear Frequency Responce. The Swedish State Shipbuilding Experimental Tank (SSPA), Gothenburh, Sweden: Technical Report B 104-3, Hydro and Aerodynamic Laboratory.
- Hwang TW, Tahk MJ. 2006. Integrated backstepping design of missile guidance and control with robust disturbance observer. Proceedings of the SICE-ICASE International Joint Conference; Bexco, Busan, Korea. p. 4911–4915.
- Ji DH, Jeong SC, Park JH, Won SC. 2012. Robust adaptive backstepping synchronization for a class of uncertain chaotic systems using fuzzy disturbance observer. Nonlinear Dyn. 69:1125–1136.
- Kolhe JP, Shaheed M, Chandar TS, Talole SE. 2013. Robust control of robot manipulators based on uncertainity and disturbance estimation. Int J Robust Nonlin Contr. 23(1):104–122. doi: 10.1002/rnc.1823
- Kuperman A, Zhong QC, Stobart RK. 2010. Filter design for UDE-based controllers. Proceeding of the UKACC International Conference on Control 2010; Coventry University, UK. p. 1–6.
- Lee SD, Tzeng CY, Huang WW. 2013. Ship steering autopilot based on ANFIS framework and conditional tuning scheme. J Marit Eng Front. 1(3):53–62.
- Lei Z, Guo c. 2015. Disturbance rejection control solution for ship steering system with uncertain time delay. J Ocean Eng. (95):78–83. doi: 10.1016/j.oceaneng.2014.12.001
- Li J, Li T, Fan Z, Bu R, Li Q, Hu J. 2011. Robust adaptive backstepping design for course-keeping control of ship with parameter uncertainty and input saturation. International Conference of Soft Computing and Pattern Recognition. p. 63–67.
- Li Z, Sun J. 2012. Disturbance compensating model predictive control with application to ship heading control. IEEE Trans Control Syst Technol. 20(1):257–265.
- Marquez HJ (2003). Nonlinear control systems-analysis and design. Hoboken (NJ): John Wiley.
- McGookin EW, Murray-Smith DJ, Li Y, Fossen TI. 2000. Ship steering control system optimisation using genetic algorithms. J Contr Eng Pract. 8:429–443. doi: 10.1016/S0967-0661(99)00159-8
- Meziou MT, Ghommam J, Derbel N. 2011. Adaptive backstepping neural network approach to ship course control. 8th International Multi-Conference on Systems. Signals & Devices; Mar 22–25; Sousse, Tunisia.
- Nomoto K, Taguchi T, Honda K, Hirans S. 1957. On the steering qualities of ship. Int Shipbuilding Prog. 4:354–370. doi: 10.3233/ISP-1957-43504
- Rigatos G, Tzafestas S. 2006. Adaptive fuzzy control for the ship steering problem. J Mech. 16:479–489.
- Sheng L, Ping Y, Yan-yan L, Yan-chun D. 2006. Application of h∞ infinite control to ship steering system. J Mar Sci Appl. 5(1):6–11. doi: 10.1007/s11804-006-0041-8
- Slotine JJE, Li W. 1991. Applied nonlinear control. Englewood Cliffs (NJ): Prentice-Hall.
- Suna H, Guoa L. 2014. Composite adaptive disturbance observer based control and back-stepping method for nonlinear system with multiple mismatched disturbances. J Franklin Inst. 351(2):1027–1041. doi: 10.1016/j.jfranklin.2013.10.002
- Talole SE, Chandar TS, Kolhe JP. 2011. Design and experimental validation of UDE based controller-observer structure for robust input-output linearisation. Int J Control. 84(5):969–970. doi: 10.1080/00207179.2011.584352
- Talole SE, Phadke SB. 2009. Robust input-output linearisation using uncertainty and disturbance estimation. Int J Control. 82(10):1794–1803. doi: 10.1080/00207170902756552
- Talole SE, Singh NK, Phadke SB. 2007. Robust input-output linearization using UDE. Proceeding of the International Conference on Advances in Control and Optimization of Dynamical Systems (ACODS2007); Feb; Bangalore. p. 79–82.
- Tao G, Jin Z. 2012. Generalized predictive control with constraints for ship autopilot. 24th Chinese Control and Decision Conference (CCDC). p. 1648–1551.
- Theodoulis S, Duc G. 2009. Missile autopilot design: gain scheduling and gap metric. J Guid Control Dyn. 32(3):986–996. doi: 10.2514/1.34756
- Triantafyllou MS, Hover FS. 2003. Maneuvering and control of marine vehicles ( Lecture Notes). Cambridge: Department of Ocean Engineering, Massachusetts Institute of Technology. Available from: MIT website.
- Witkowska A, Smierzchalski R. 2009. Nonlinear backstepping ship course controller. Int J Automat Comput. 6(3):277–284. doi: 10.1007/s11633-009-0277-2
- Witkowska A, Tomera M, Smierzchalski R. 2007. A backstepping approach to ship course control. Int J Appl Math Comput Sci. 17(1):73–85. doi: 10.2478/v10006-007-0007-2
- Xia G, HuiyongWu X, Shao X. 2014. Adaptive filtering backstepping for ships steering control without velocity measurements and with input constraints. In: Bakhoum EG, editor. Mathematical Problems in Engineering. Hindawi Publishing Corporation. p.1–9.
- Yao J, Jiao Z, Ma D. 2014. Extended-state-observer-based output feedback nonlinear robust control of hydraulic systems with backstepping. IEEE Trans Ind Electron. 61(11):6285–6293. doi: 10.1109/TIE.2014.2304912
- Zhong QC, Rees D. 2004. Control of uncertain lti systems based on an uncertainty and disturbance estimator. J Dyn Syst Meas Control. 126:905–910. doi: 10.1115/1.1850529
- Zhou J, Wen C. 2008. Adaptive backstepping control of uncertain systems. Lecture Notes in Control and Information Sciences. Vol. 372, Berlin: Springer-Verlag.