
 ?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.
?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.ABSTRACT
In this letter, a new feature-based detector using dispersion relative entropy (FD-DRE) is proposed to detect sea-surface small targets, where clutter suppression is well designed in both Doppler and entropy domains. In Doppler domain, whitened Doppler spectrum is presented to mitigate the main sea clutter region, so as to magnify the geometric difference between sea clutter and returns with target. In entropy domain, dispersion relative entropy (DRE) is developed to condense the difference into single feature for detection, where relative operator can further aggravate the fluctuation of sea clutter. Finally, the experimental results on IPIX database show that FD-DRE detector can significantly improve performance relative to the existing single-feature-based detectors and attain competitive performance as the recent tri-feature-based detector.
1. Introduction
Generally, it is a challenging and meaningful task for marine radars to detect low-velocity and floating small targets on the sea surface, such as submarine periscopes, speed boats, lifeboats and armed frogmen. Totally different from ships and warships, the physical lengths of small targets are a few metres or tens of metres, and thus, they are assumed to be point-like targets in detection. Additionally, though the utilization of high range resolution can diminish the clutter returns by reducing the resolution cell size, the signal-to-clutter ratios (SCRs) of small targets are still low for detection. Therefore, in radar signal processing, long-time integration technology is commonly used to improve the low SCRs (Guo and Shui Citation2020; Gu Citation2020). In the long-time scale of the order of seconds, sea clutter exhibits nonlinear and nonstationary properties (Xu et al. Citation2019), resulting in heavy performance degradation for traditional detectors based on short-time clutter models.
Currently, various novel methods have been developed to find small targets under the long observation time, which can be broadly classified into the following three groups. First, in chaos method, evolution of sea clutter can be predicted by the interaction from a determined nonlinear dynamic system, with predicted error used for detection (Li et al. Citation2009). However, the chaotic nature of measured sea clutter returns is questionable because the commonly used chaotic invariant measures are incapable of uniquely identifying chaotic processes (Mcdonald and Damini Citation2004). Second, fractal-based methods are introduced to depict the irregularity and roughness of dynamic sea surface. In Hu, Tung, and Gao (Citation2006), Hurst exponent is extracted from the multifractal analysis of temporal amplitude series to serve as test statistic. In Xu (Citation2010), Hurst exponent and intercept are combined to form the joint fractal detector. Furthermore, fractal theory is applied in the transform domain, such as frequency domain (Guan et al. Citation2012), fractional Fourier transform domain (Chen et al. Citation2013) and autoregressive spectrum (Fan et al. Citation2015). Though the fractal-based detectors have simple structure, it is often required the observation time of more than several seconds to obtain satisfied performance. Third, the feature-based methods can condense the statistical differences between sea clutter and returns with target into features. In terms of the nonstationary property of sea clutter, a consistency factor of speckle is proposed for detection (Shi, Xie, and Li Citation2016). In terms of the fluctuation of time series, temporal received radar echoes are assumed to be represented by graph-based characterization (Yan et al. Citation2019). For the intensity properties in high-frequency surface wave radar, target ridges on the TF representation serve as one feature to successfully find ships (Cai et al. Citation2021).
In fact, entropy is one of the powerful tools to evaluate the random and complex characteristics of time series. In Li et al. (Citation2019), temporal information entropy is used for detection. Besides, information entropy in frequency domain is extracted to reflect the Doppler spectrum fluctuation (Shui, Li, and Xu Citation2014). In order to further exploit refined irregularity of time series, sample entropy (SE), permutation entropy (PE) and fuzzy entropy are broadly used for the length of series within one thousand (Richman and Moorman Citation2000; Zanin et al. Citation2012; Chen et al. Citation2007). To overcome the shortcomings of SE and PE, dispersion entropy (DE) replaces the order relations with real values and maps data into limited discrete values, which can accelerate processing time and improve the resistance to noise (Rostaghi and Azami Citation2016). Thus, it is meaningful to design a new entropy feature to further excavate refined features from sea clutter time series.
In this letter, the main contributions are in the following two aspects. First, whitened Doppler spectrum (WDS) is defined to mitigate sea clutter and enlarge the geometric difference between sea clutter and returns with target. Second, a new entropy-feature-based detector is proposed, where dispersion relative entropy (DRE) can successfully capture the irregularity of sea clutter in WDS. In addition, robust performance of the proposed detector is verified on the measured IPIX datasets (Greco, Gini, and Rangaswamy Citation2006).
2. Entropy feature detection using dual-domain clutter suppression
For surveillance marine radars operated at the dwelling mode, observation vector z=[z(1), z(2), … , z(N)]T consists of a train of N coherent pulses at cell under test (CUT). Then, detection problem can be classified into the following binary hypotheses test (Guo and Shui Citation2020; Gu Citation2020).
where c is the sea clutter vector, s is the target vector, zp and cp are the observation vector and sea clutter vector from the pth range cell, respectively, and P is the number of reference cells (RCs) around CUT. The RCs with pure clutter can provide information for CUT to mitigate sea clutter.
2.1. Clutter suppression in Doppler domain
Generally, sea clutter time series from the dynamic rough sea surface is irregular and random. However, returns of targets are regular and determined in the high SCR cases where targets play the main role in radar returns. In the low SCR cases, the difference gap between returns with target and sea clutter is limited in time domain. Therefore, it is required to find a transform domain to magnify the difference gap.
In Doppler domain, amplitude Doppler spectrum (DS) is given by
where fr is the pulse repetition frequency (PRF) of radar and fd is the Doppler offset of the target. In , sea clutter has inhomogeneous spectrum with a wide main clutter region and Doppler offsets of target are narrow. The main clutter region has great negative influence on detection performance, especially when small targets fall into the main sea clutter region.
Figure 1. Demonstration of the difference between sea clutter and returns with target in different domains. (a) Sea clutter in time domain. (b) Returns with target in time domain. (c) Sea clutter in Doppler domain. (d) Returns with target in Doppler domain. (e) Sea clutter in WDS. (f) Returns with target in WDS.
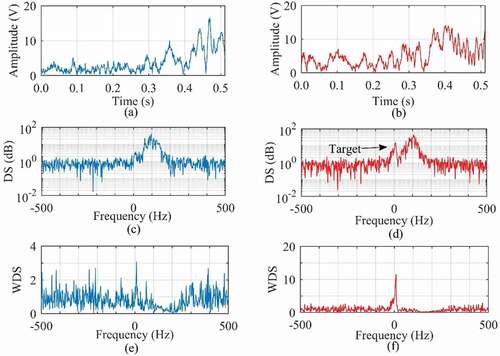
To suppress the main clutter region, WDS is defined by the ratio of Doppler spectrum at CUT to the average Doppler spectrum at RCs
In this way, sea clutter is completely suppressed and uniformly distributed in the whole frequency domain, similar to the famous whitened processing. In , it is clearly found that the main clutter region can be suppressed in both sea clutter and returns with target and small target can be highlighted in WDS. Thus, WDS has the best ability to enlarge the difference, even though the small targets of low SCRs fall into the main clutter region.
2.2. Clutter suppression in entropy domain
To further enlarge the difference of sea clutter and returns with target in WDS, the dispersion entropy (DE) is modified and well designed by adding the relative operator to mitigate clutter in entropy domain. The new entropy feature termed DRE can aggravate the irregularity of sea clutter and increase the fixed patterns of returns with target. For a given vector, the detailed steps of DRE are as follows.
Step 1. Normal cumulative distribution function is employed to linearly map x into . Then, each yn is assigned by an integer
from 1 to c via a linear algorithm
where means rounding to an integer.
Step 2. Given embedding dimension m and time delay d, reconstruct embedding vector
Let , it creates a dispersion pattern
. Due to the limited values from 1 to c, the number of possible dispersion patterns of embedding vectors is cm, denoted by a set
. To clearly understand, the set is rewritten as
.
Step 3. All the embedding vectors in EquationEquation 5(5)
(5) are classified into cm dispersion patterns. For each of cm potential dispersion patterns, count the numbers when the embedding vectors are equal to the jth dispersion pattern
where number is the function to count frequency number.
Step 4. The relative operator is proposed in the frequency number, and it is defined by
The numerator is the frequency number of the jth dispersion pattern and the denominator is the mean frequency number of the remaining (cm-1) dispersion patterns. For H1 hypothesis, it can enlarge the gap between the maximum and the minimum values of frequency number, which can ensure the fixed pattern of a peak. For H0 hypothesis, relative operator can aggravate the structural fluctuation of random series.
Step 5. Based on the Shannon’s definition of entropy, DRE value with embedding dimension m, time delay d and the number of classes c is computed by
where
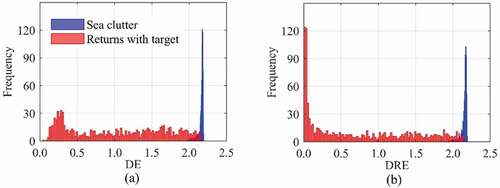
plots the histogram distributions of DE and DRE for sea clutter and returns with target. For sea clutter, it has great values of DE and DRE, due to the random property. For returns with target, it has small values of DE and DRE because its WDS has a regular mode with a high peak. Furthermore, DRE has better ability to separate sea clutter and returns with target than DE, where returns with target are inclined to have small DRE in a great probability. Therefore, the proposed DRE can serve as an effective feature to deeply describe the geometric characteristics in WDS.
Figure 2. Histogram distributions of DE and DRE. (a) DE and (b) DRE.
In , flowchart of the feature-based detector using dispersion relative entropy (FD-DRE) is given in detail. Both observation vectors at CUT and RCs are first transformed into frequency domain. Second, RCs are used to suppress the main clutter region at CUT since it is assumed that RCs have the same statistical properties of sea clutter as CUT. Third, DRE is extracted from the WDS to generate the test statistic for detection. Finally, the decision result is declared by comparing the test statistic with the threshold at a given false alarm rate. The main novelty lies in the refined DRE feature from WDS, which are highlighted in red. The DRE and WDS can successfully mitigate sea clutter in both the statistic of dispersion patterns and the Doppler spectrum.
Figure 3. Flowchart of FD-DRE detector.
3. Experimental results and evaluation
It has been widely recognized that open IPIX database collected by McMaster University in Canada is used to testify the detection performance of sea-surface small targets (Greco, Gini, and Rangaswamy Citation2006). The operating parameters of IPIX radar and the environment parameters have a great influence on the radar’s returns. The former affects the high-resolution sea clutter with complicated characteristics and guarantees the point-like targets when the X-band radar operates at dwelling mode with a low grazing angle of 0.32°, a range resolution of 30 m and PRF of 1000 Hz and dual polarizations. However, the latter determines the types of sea clutter and the levels of SCRs in detection. lists the filenames, wind speeds (WS), significant wave heights (SWH), wind direction (WD) and Douglas sea states. It is found that the clutter environments cover a wide range from low sea states to high sea states, and two typical types of test targets have a wide range of SCRs from −1.8 dB to 28.5 dB in 15 datasets, where one type of test target is an anchored spherical block of Styrofoam wrapped with wire mesh and diameter of 1 m in the first five datasets and the other type is a low-velocity small boat in the last 10 datasets. Thus, these datasets are sufficient to evaluate the detection performance of different small targets under different detection environments.
Table 1. Description of IPIX datasets.
3.1. Parameter selection in DRE
In fact, DRE in (8) is determined by time delay d, integer embedding dimension m and the number of classes c. First, the recommended value of d is 1 when the number of series is within 1000 or there exists no multiple peaks (Rostaghi and Azami Citation2016). Second, the selection of m is closely related to variation of series, where a small m fails to discover dynamic changes and a great m may miss the slight changes. Third, it is suggested that c is greater than one and the number of potential dispersion patterns is smaller than the length of series, i.e., cm < N. A small c makes two quite far values assigned the same values. Inversely, a great c makes a very small difference change classes, resulting in the sensitivity to noise. Besides, computation time increases as c or m becomes large. Thus, it is important to select suitable parameters to make a trade-off between good performance and computational cost.
illustrates the influence of two parameters on performance when N = 512. It is clearly found that it has the best detection performance when c = 3. In order to meet the equation that cm <N, the value of m is strictly limited to 6. As m becomes large, the detection performance is monotonically decreasing, implying that there exist slight changes in WDS series. Thus, it is suggested for m = 2 and c = 3 within 1000 length in comprehensive consideration of good performance and computational cost.
Figure 4. Influence of parameters on detection performance. (a) m = 2 and (b) c = 3.
3.2. Performance comparison using measured datasets
Below, the experimental results of the proposed detector and existing three detectors are reported. In the experiments, the number of pulses N is 512, corresponding to the observation time of 0.512 s. Due to the limitation of samples, the number of reference cells P is 9 and the false alarm rate Pfa is 10−3.
In , both consistency factor detector (Shi, Xie, and Li Citation2016) and the fractal-based detector (Hu, Tung, and Gao Citation2006) performed poorly, attributed to the following two aspects. On the one hand, only one feature extracted from time domain exploits amplitude information, which is hard to detect small targets of low SCRs. On the other hand, the fractal feature and consistency factor are effective only when the observation time extends to several seconds. Therefore, multiple features and extraction of effective features are potential ways to improve detection performance of small targets. For the tri-feature-based detector (Li et al. Citation2019), one feature extracted from time domain and two features from Doppler spectrum are combined to find small targets, which can guarantee great performance improvement relative to the above two single-feature-based detectors. However, it brings great amounts of computational cost at the same time since a false-alarm-controllable classifier should be well designed in the three-dimensional feature space. Moreover, it is still a challenging task to design the classifier as the number of features is more than three.
Figure 5. Detection results in the 15 datasets under four polarizations (N = 512, Pfa = 10−3). (a) HH. (b) HV. (c) VH. (d) VV.
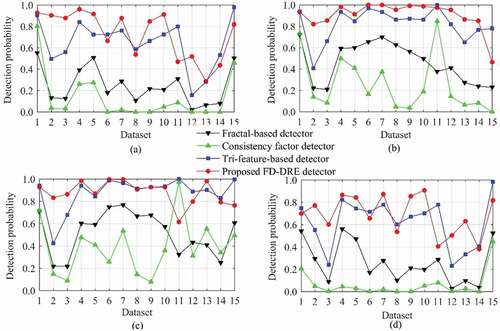
In order to attain good performance and low computation cost, we just redesign one effective feature. It is found that the proposed FD-DRE detector has the best overall detection probability. Relative to the tri-feature-based detector (Li et al. Citation2019), it has slight improvement by 12%, 10%, 0.1% and 11% at HH, HV, VH and VV polarizations, thanks to the refined design of DRE in WDS. Moreover, the detection probabilities from 15 datasets at the cross polarizations (HV and VH) are higher than that at the co-polarizations (HH and VV). Among the 15 datasets in , the proposed FD-DRE detector only suffers performance loss in the 11th and 15th datasets with the SCRs of 9.2 dB and 8.5 dB, respectively, compared with the tri-feature-based detector (Li et al. Citation2019). It is because that the effectiveness of three features in the tri-feature-based detector (Li et al. Citation2019) highly depends on high SCRs and suffers great performance loss in the low SCR cases. Although the proposed detector of single feature lacks the dimensional gain, it still can attain comparable performance in the high SCR cases, owing to the well-designed entropy feature of fused information in both energy and geometry. Moreover, in the low SCR cases, the proposed FD-DRE detector can attain great improvement relative to the other three detectors, such as in the 2th, 3th, 12th and 13th datasets. This benefits from the successful dual-domain clutter suppression in the entropy feature when Doppler shifts of small targets fall outside the main clutter region. Therefore, considering computational cost and robust performance, it is a good choice of the FD-DRE detector to find small targets, especially when the distance of the main clutter and Doppler shifts of target becomes great in the low SCR cases.
Below, the influence of observation time on overall detection probability is investigated in . The observation time is set as 0.256 s, 0.512 s and 1.024 s, and the average detection probability is the mean from 15 datasets at each polarization. Three conclusions are drawn as follows. First, all the detectors can improve performance as the observation time increases. It is proved that the long observation is indeed an effective way to find sea-surface small targets. Second, the proposed FD-DRE detector has the best overall performance at different observation time, especially at the observation time of 1.024 s. It is because that the Doppler spectrum can provide refined properties as the observation time becomes large. Third, performance improvement of the FD-DRE detector is smaller at the cross polarizations than that at the co-polarizations. The reason is naturally that the detection probabilities already reach to 1 at many datasets, which is called the ceiling effect.
Table 2. Average detection probability at different observation time.
4. Conclusions
This letter deals with the detection problem of sea-surface small targets to obtain low computational cost and good performance for marine radars at the dwelling mode. A new single-feature-based detector using DRE was proposed, where entropy feature is well designed with dual-domain clutter suppression in entropy and Doppler domains. The proposed detector has great improvement than the two existing single-feature-based detectors and attains comparable performance as the recent tri-feature-based detector.
Disclosure statement
No potential conflict of interest was reported by the authors.
Additional information
Funding
References
- Cai, J., H. Zhou, W. Huang, and B. Wen. 2021. “Ship Detection and Direction Finding Based on Time-Frequency Analysis for Compact HF Radar.” IEEE Geoscience and Remote Sensing Letters 18 (1): 72–76. doi:10.1109/LGRS.2020.2967387.
- Chen, X., J. Guan, Y. He, and J. Zhang. 2013. “Detection of Low Observable Moving Target in Sea Clutter via Fractal Characteristics in Fractional Fourier Transform Domain.” IET Radar Sonar and Navigation 7 (6): 635–651. doi:10.1049/iet-rsn.2012.0116.
- Chen, W., Z. Wang, H. Xie, and W. Yu. 2007. “Characterization of Surface EMG Signal Based on Fuzzy Entropy.” IEEE Transactions on Neural Systems and Rehabilitation Engineering 15 (2): 266–272. doi:10.1109/TNSRE.2007.897025.
- Fan, Y., F. Luo, M. Li, C. Hu, and S. Chen. 2015. “Fractal Properties of Autoregressive Spectrum and Its Application on Weak Target Detection in Sea Clutter Background.” IET Radar Sonar and Navigation 9 (8): 1070–1077. doi:10.1049/iet-rsn.2014.0473.
- Greco, M., F. Gini, and M. Rangaswamy. 2006. “Statistical Analysis of Measured Polarimetric Clutter Data at Different Range Resolutions.” IEE Proceedings-Radar, Sonar and Navigation 153 (6): 473–481. doi:10.1049/ip-rsn:20060045.
- Gu, T. C. 2020. “Detection of Small Floating Targets on the Sea Surface Based on Multi-Features and Principal Component Analysis.” IEEE Geoscience and Remote Sensing Letters 17 (5): 809–813. doi:10.1109/LGRS.2019.2935262.
- Guan, J., N. B. Liu, Y. Huang, and Y. He. 2012. “Fractal Characteristic in Frequency Domain for Target Detection Within Sea Clutter.” IET Radar Sonar and Navigation 6 (5): 293–306. doi:10.1049/iet-rsn.2011.0250.
- Guo, Z., and P. Shui. 2020. “Anomaly Based Sea-Surface Small Target Detection Using K-Nearest Neighbor Classification.” IEEE Transactions on Aerospace and Electronic Systems 56 (6): 4947–4964. doi:10.1109/TAES.2020.3011868.
- Hu, J., W. Tung, and J. Gao. 2006. “Detection of Low Observable Targets Within Sea Clutter by Structure Function Based Multifractal Analysis.” IEEE Transactions on Antennas and Propagation 54 (1): 136–143. doi:10.1109/TAP.2005.861541.
- Li, J., W. Wang, J. Sun, and S. Mao. 2009. “Chaos-Based Target Detection from Sea Clutter.” In 2009 IET International Radar Conference, 1–4. doi:10.1049/cp.2009.0230.
- Li, Y. Z., P. C. Xie, Z. S. Tang, and T. Jiang. 2019. “SVM-Based Sea-Surface Small Target Detection: A False-Alarm-Rate-Controllable Approach.” IEEE Geoscience and Remote Sensing Letters 16 (8): 1225–1229. doi:10.1109/LGRS.2019.2894385.
- Mcdonald, M., and A. Damini. 2004. “Limitations of Nonlinear Chaotic Dynamics in Predicting Sea Clutter Returns.” IEE Proceedings-Radar Sonar and Navigation 151 (2): 105–113. doi:10.1049/ip-rsn:20040261.
- Richman, J. S., and J. R. Moorman. 2000. “Physiological Time-Series Analysis Using Approximate Entropy and Sample Entropy.” American Journal of Physiology Heart & Circulatory Physiology 278 (6): 2039–2049. doi:10.1152/ajpheart.2000.278.6.H2039.
- Rostaghi, M., and H. Azami. 2016. “Dispersion Entropy: A Measure for Time-Series Analysis.” IEEE Signal Processing Letters 23 (5): 610–614. doi:10.1109/LSP.2016.2542881.
- Shi, Y., X. Xie, and D. Li. 2016. “Range Distributed Floating Target Detection in Sea Clutter via Feature-Based Detector.” IEEE Geoscience and Remote Sensing Letters 13 (12): 1847–1850. doi:10.1109/LGRS.2016.2614750.
- Shui, P., D. Li, and S. Xu. 2014. “Tri-Feature-Based Detection of Floating Small Targets in Sea Clutter.” IEEE Transactions on Aerospace and Electronic Systems 50 (2): 1416–1430. doi:10.1109/TAES.2014.120657.
- Xu, X. K. 2010. “Low Observable Targets Detection by Joint Fractal Properties of Sea Clutter: An Experimental Study of IPIX OHGR Datasets.” IEEE Transactions on Antennas and Propagation 58 (4): 1425–1429. doi:10.1109/TAP.2010.2041144.
- Xu, S., L. Wang, F. Zhang, and P. Shui. 2019. “Outlier-Robust Parameters Estimation for Compound-Gaussian Clutter Using Inverse Gamma Texture Based on Truncated Moments.” Remote Sensing Letters 10 (3): 274–282. doi:10.1080/2150704X.2018.1547444.
- Yan, K., Y. Bai, H. Wu, and X. Zhang. 2019. “Robust Target Detection Within Sea Clutter Based on Graphs.” IEEE Transactions on Geoscience and Remote Sensing 57 (9): 7093–7103. doi:10.1109/TGRS.2019.2911451.
- Zanin, M., L. Zunino, O. A. Rosso, and D. Papo. 2012. “Permutation Entropy and Its Main Biomedical and Econophysics Applications: A Review.” Entropy 14 (8): 1553–1577. doi:10.3390/e14081553.