
Abstract
Terrain access is a critical factor influencing the feasibility of forest operations in steep mountainous terrain. Long extraction distances coupled with terrain obstacles can favor the use of helicopters in timber extraction in such areas. However, helicopter logging in the Italian Alps is not commonplace when compared to other Alpine regions, for example, in Switzerland and Austria. The use of light-lift helicopters has recently caught the attention of practitioners as an alternative to more traditional medium- to heavy-lift aircraft in the Alps. This article reports the findings of two preliminary case studies using light-lift helicopters for the extraction of high value timber and fire-damaged timber subsequently exposed to bark beetle disturbance. In order to provide a comprehensive analysis of the factors affecting helicopter logging productivity, the two case studies were separately analyzed using time-element analysis supported by on-board global navigation satellite system (GNSS) devices. Additionally, an external video camera was used to continuously monitor the operations. The payload utilization was 86% for the extraction of high value timber and 70% for fire-damaged timber subsequently exposed to bark beetle disturbance. Variation in the turn time was mostly related to the hooking, choker return, and load times, as well as flying distance. Above all, the load hooking time explains c. 27% of the variance, revealing its critical influence on logging productivity.
Introduction
With helicopter logging, logs are transported from the stump area to areas that can be more easily accessed by conventional timber truck (Bernard et al. Citation2008). Helicopter logging is considered a promising alternative to conventional ground-based and/or cable-based methods when extracting timber from sensitive forest areas, such as the tropics (Bigsby and Ling Citation2013). It is also more suitable when fast removals are required at timber salvage sites (Akay et al. Citation2006), in environmentally sensitive terrain (Christian and Brackley Citation2007), to reduce fire risk, and to limit the spread of pests, where these are prioritized against cost of the operations (Faccoli et al. Citation2011). Moreover, helicopter logging is considered practical for harvesting high value timber from inaccessible sites (Wang et al. Citation2005).
Helicopter logging in the Italian Alps
Italy's total forest area covers 8.8 million ha, of which c. 32% is located in Alpine regions (IFNC Citation2005). As a result cable yarding systems are commonly used (Zimbalatti and Proto Citation2009; Valente et al. Citation2011; Proto and Zimbalatti Citation2015), with one in four logging companies having both the skills and the equipment available for cable yarding (Spinelli et al. Citation2013).
However, poor forest road infrastructure and unsuitable road spacing in Alpine areas critically inhibit these operations (Cavalli and Grigolato Citation2010; Grigolato et al. Citation2013). Given these conditions, helicopter logging systems prove to be an economically feasible alternative to traditional timber extraction methods.
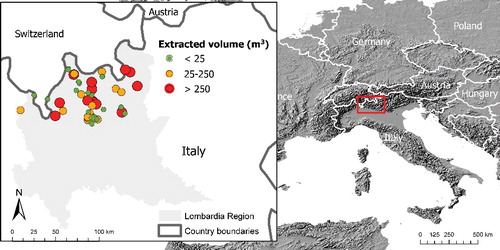
In recent years, interest in helicopter logging has increased in the Italian Alps, especially in the Central Alps (). In this area, c. 15,000 m3 (250 ha) of timber was extracted by helicopters across 45 different operations between the period 2011 and 2012, most of which were performed by light-lift helicopters. Nearly three-quarters (73%) of the total extracted volume was from sites with steep slopes for stand sanitation purposes (averaging c. 330 m3 removed per operation), while 26% was from ordinary cuts (averaging nearly 125 m3 for each operation). Approximately 73% of the operations handled logs or full trees for lumber production while the remaining 27% dealt with wood for biofuel production (i.e., firewood and woodchips) (Regione Lombardia Citation2013).
Figure 1. Distribution of the 45 helicopter logging operations in the Italian Central Alps within the Regione Lombardia from 2011 to 2012.
Currently, however, there is little recognition of the potential benefits of using helicopter logging in the Italian Alps as compared to Switzerland (Heinimann and Caminada Citation1996) and Austria (Stampfer et al. Citation2002). The only detailed study found on helicopter logging in Italy was carried out in the Eastern Alps in the 1970s where, due to the pilot's lack of experience, the aircraft's payload capacity was not fully utilized (Baldini Citation1977). Recent helicopter logging in the Central Italian Alps initiated this investigation into the effectiveness of such operations by local forest enterprises.
The objective of this study is to analyze the productivity of light-lift helicopters in two different scenarios – the extraction of high value timber and the extraction of wood damaged both by fires and subsequent bark beetle attack.
In order to analyze the load hooking time, which is considered one of the critical elements in helicopter logging operations, the analyses were supported by the integration of a global navigation satellite system (GNSS) to monitor the position of the helicopter as well as a video camera mounted on the frame of the helicopter to monitor the hooking and the unhooking process.
Materials and methods
Case studies
Two distinct and separate helicopter logging operations were selected for the study. Although the main objective of the study was not to perform a comparative analysis, the two operations did use similar helicopter types (i.e., light-lift helicopter) and the same pilot land crews, as well as identical hooking systems.
The productivity of helicopter extraction was determined in two different timber extraction operations: (i) high value timber (case study A: Val Belviso); and (ii) wood damaged both by fire and bark beetles (case study B: Grosio) ().
In both case studies, time studies were completed at the load turn level. The turn was further divided into elements (Dykstra Citation1976; Baldini Citation1977; Stampfer et al. Citation2002; Horcher and Visser Citation2011) ().
An experienced pilot with in excess of 8000 flying hours in North America and in Europe was used in both scenarios; 4000 of these hours were completed in logging operations using workers trained in helicopter loading procedures, which was considered a key element for the study. When load transportation is based on a single long sling line, such as in the case of log transportation, the pilot has no visual feedback of the load. He only gets feedback through the forces and the torques imposed on the helicopter by said load (Bernard et al. Citation2008). Consequently, an experienced pilot is essential to reduce the risk of load oscillation amplification and also to guarantee a high level of productivity (Stampfer et al. Citation2002; Horcher and Visser Citation2011).
The theoretical load capacity of helicopters is affected by the mass of the hooking devices, including the primary hook, tagline, and remote hook or grapple (Hartsough et al. Citation1985, Citation1986). It is also influenced by air density, temperature, and barometric pressure, which can cause the reduction of the theoretical load capacity (Tomazin and Kovacs Citation2003).
In case study A, a Aérospatiale LAMA SA315 B light-lift helicopter with a maximum cargo-swing load of 9.5 kN at 1000 m a.s.l. (above sea level) was opportunely considered by the pilot. In case study B, a Eurocopter AS 350 B3 Ecureuil light-lift helicopter with a maximum cargo-swing load of 13.5 kN at 1000 m a.s.l. was instead considered optimal by the pilot.
Ambient temperature during the study was below 10 °C while the study sites' elevations were between 1000 and 1500 m a.s.l.
A single forest enterprise undertook felling of both sites. Where necessary the trees were bucked to limit potential overloading and at the same time optimize payloads. The light-lift helicopter used in case study A had a maximum payload of 9.5 kN while for case study B it was 13.5 kN.
In case study A, the felling and processing operations were performed in November 2012 two weeks before helicopter extraction. In case study B, the trees were felled during the autumn and winter seasons in 2012 while extraction was conducted in March 2013. In the latter case, a full tree system was mainly used due to the low wood density of the dryer fire damaged timber.
In both the studies, the hook (Mechanical Specialties, Inc., Olympia, WA, Model 601) was composed of a single slot. This represents a critical component of the hooking operation since it required the load to be properly arranged prior to hooking in order to prevent overloading and resulting delays on the turn.
In both cases piling of timber was done using an excavator based carrier mounted with a log grapple at the landing site. This allowed the forest company to optimize landing space with continuous landings located along forest roads due to a lack of appropriate areas to create centralized landings closer to the felled stands.
Data collection and post-processing
Data was collected simultaneously using GNSS receivers (GARMIN® 62 Cs, Olathe, KS) located inside the helicopter cabin and a micro video camera (Drift®, Ghost-HD, London, UK) with a field of view of 170° mounted on the external frame of the helicopter and oriented to monitor the hook line. Additionally, a hand-held computer with dedicated time-study software (UMT Laubrass®, Montreal, QC) was used to record the preselected work elements.
GNSS receivers are commonly used to record location, heading, and speed, as well as to collect information derived from satellites to monitor and track mobile forestry machines (Veal et al. Citation2001; Holzleitner et al. Citation2011; Simwanda et al. Citation2011; Gallo et al. Citation2013; Pellegrini et al. Citation2013; Ciesa et al. Citation2014). Christian and Brackley (Citation2007), as well as Horcher and Visser (Citation2011), have implemented the use of on-board GNSS receivers to conduct time studies on helicopter logging. The time and the positional data recorded can be used to calculate distances travelled and average speeds, as well as acceleration and direction. It is assumed that low speeds and low altitudes are useful for identifying the hooking and unhooking time elements, while high speeds and altitudes are beneficial for identifying the loaded and unloaded travelling time elements (Horcher and Visser Citation2011).
In this study, a consumer GNSS receiver was used to derive heading and speed from the recorded data. The chosen GNSS receiver was used on recommendation from the helicopter logging companies involved in this study and because of its light weight. However, its accuracy in terms of positional data is limited. Notably, the error associated with collected data has a greater influence on derived speed and acceleration. In contrast, its impacts are minimal in terms of calculating flying distance and when data are used to identify the beginning of hooking and unhooking time elements. For this reason, a consumer GNSS receiver was deemed to be accurate enough to determine the basic time elements and covariates in this study. As suggested by Horcher and Visser (Citation2011), location data was gathered at one second intervals.
The geo-referenced points acquired by the GNSS receiver were synchronized with the time study, which was conducted at turn level (Björheden Citation1991). The recorded geo-referenced data were then grouped and identified in relation to the consecutive turn number ID and subsequently the geo-referenced data was synchronized using GIS software. This made it possible to identify the turn elements by separating the turn time into the productive time elements on the basis of speed variation and the location of the helicopter with respect to landing sites ().
Figure 2. Overview of the GNSS data and GIS integrated analysis for time element identification for each helicopter turn (left: case study A; right: case study B).
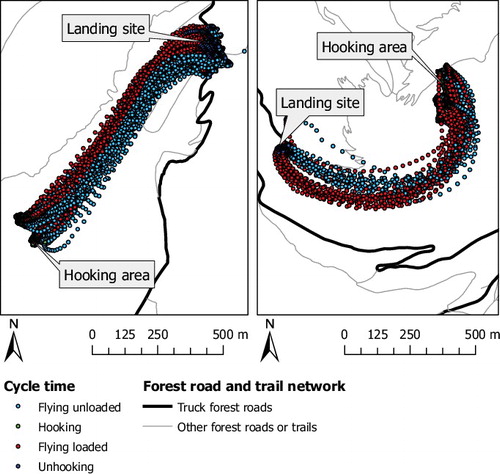
The first step of the GIS analysis involved identifying the hooking and unhooking times in order to then extract the unloaded and loaded travel times between the landings and the hooking points. The hooking and the unhooking element times were determined by analyzing the average speed, elevation, and location of the helicopter. The hooking time element was determined to start when the geo-referenced points showed a rapid decrease in altitude and speed (below 15 km h−1) and end when data show a recovery (i.e., a rapid increase in altitude and speed; over 15 km h−1). Similarly, the hooking position was estimated to be the centroid of the five lowest consecutive altitude points that occur during the hooking time and where the flying direction of the helicopter changed.
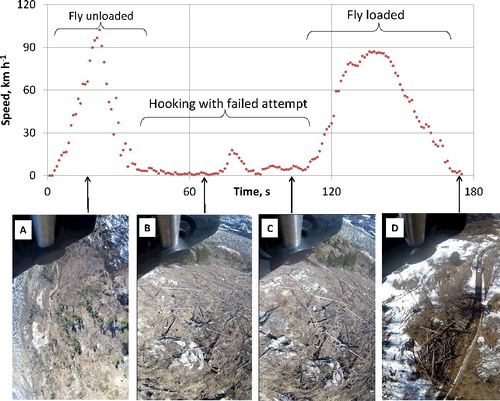
The video analysis was used to calibrate the GIS data used to derive the hooking time elements. The video analysis allowed identification of hooking times with failed attempts (B, C) caused either by excessive load weights or obstructed loads partially covered by other timber or other obstructions.
Figure 3. Example of the interpretation of the GNSS data in terms of speed with the support of the video analysis.
Unhooking time was determined through the integration of the time study reports, the geo-referenced points and their derived data. The unhooking time element was considered to start when the geo-referenced points showed a rapid decrease in altitude and speed (below 30 km h−1; D) in the proximity of the landing point. The landing point had previously been surveyed by a D-GNSS system (a primary GNSS system that aids in determining the GNSS position for a reference station). The end of the unhooking time was defined as the point when the time study report coincided with the release of the loads and the end of the turn.
These time elements were analyzed semi-automatically based on previous analysis using a spreadsheet where the GNSS data were integrated with the time study data in order to assign a turn ID, load co-variables (i.e., payload, volume, and number of logs) and factors (i.e., choker returns and failed or successful hooking) to each GNSS location.
For each turn the following co-variables were extracted by GIS elaboration over the GNSS data: horizontal distance (HorDist); flying distance from landing points to the hooking centroids (DistFlyOut); flying distance from hooking centroids to landings points (DistFlyIn); chord slope (Slope); and change in elevation between landing and hook points (ElevChange) (). All GIS analysis was completed in ArcGIS® 10.1.
Table 1. Description of the main characteristics of the two case study areas.
Table 2. Numerical variables and time components.
Re-fuelling sites were surveyed by the GNSS. In both case studies, re-fuelling sites were located close to the landing areas. In addition, radio communications with the pilot supported the time studies, allowing him to comment on any unusual turn situations. For each turn, actual payloads were measured by the helicopter's load sensors and communicated by radio. Each payload was measured during the loaded flight in order to reduce the bias potentially created by field measurements (Hartsough et al. Citation1985). In addition, some payloads were monitored using video recordings from inside the cabin, focusing on the payload display. During case study A, the volume of each load was estimated by measuring the diameter at half-length and the length of each of the dropped log assortments.
In order to accurately convert the weight of the loads to volumes taking into account the density of the wood and its moisture content, wood samples were collected and analyzed in the laboratory according to the national norms UNI ISO 3131:1985 (wood density) and UNI EN 14774-1: 2009 (moisture content).
Statistical analysis
For both scenarios, the analysis of the variance was used to quantify the influence of nominal variables affecting turn time of the helicopter logging.
The analysis followed the approach proposed by Stampfer et al. (Citation2002). A linear model with all the co-variables and factors was developed, then the non-linearity of the co-variables was evaluated, a number of sub-models were chosen through the removal of non-significant variables and, finally, the two-way interactions of the sub-models was selected.
A regression analysis was conducted independently for the two case studies in order to build time-study models capable of predicting productivity as a function of significant independent variables. The analysis was based on a linear model with all the factors and covariates included while the final model selected and removed variables that were not significant at the 0.05 level. The homogeneity of variance was tested by Levene's test (0.05).
The hooking operation was analyzed by segregating based on the helicopter models used since both operations used the same hooking system, tagline length, and crews. The comparison considered both the difference in hooking time between fresh timber and damaged or dry timber as well as the difference between hooking with failed attempts versus hooking successfully.
To analyze the difference in hooking efficiencies, Scheffe's test for multiple comparisons was chosen because of the unequal sample sizes.
Basic mean comparisons as well as an analysis of the variance and a regression analysis were carried out using Statgraphics® Centurion XVI (v16.1.07). Comparison of means was tested at a 0.05 confidence level while the stepwise model development used a threshold of 0.05 parameter inclusion.
Results
Summary statistics
A summary of the statistical analysis conducted for the two case studies is reported in . The turn time averaged approximately 2.1 minutes and 2.2 minutes in case studies A and B, respectively.
Table 3. Summary statistics for the numerical variables and time.
The average turn payload was 8.2 kN for case study A and 9.5 kN for case study B, corresponding to a payload utilization of 86% for the former and 70% for the latter.
Independent of wood type, the turn payloads were analyzed for the two case studies. As the turn payloads for both scenarios were normally distributed, a t test for independent samples was done to verify if the means of two populations were equal. The test rejected the null hypothesis, reporting a significant difference between the payload means (p < 0.05). The Eurocopter AS 350 B3 Ecureuil reported a significantly higher average turn payload, but it should be noted that it is difficult for ground crews to estimate load, which may have reduced the final payload utilization.
Average flying distances were between 1000 and 1100 m. This is true even for case study B, where the location of the hooking area was closer (c. 580 m) in terms of horizontal distance compared to case study A (c. 1010 m). In fact, the extraction area in case study B was located on the opposite side of the mountain with respect to the landing location. This forced the helicopter to turn around the side of the mountain to reach the hooking points by keeping the altitude constant.
In case study A, where Aérospatiale LAMA SA315 B was used, fuelling (amounting to 160–180 l per filling) occurred every 55–60 minutes during productive time over a cumulative horizontal flight distance of 50–55 km and a positive vertical elevation change of 2500–3500 m. The total volume transported between fuelling events was c. 196–216 kN.
In case study B, where the Eurocopter AS 350 B3 Ecureuil was used, fuelling was the same as for case study A (140–160 l) over a cumulative horizontal flight distance of 45–50 km and a positive vertical elevation change of 4000–5000 m. The total volume transported between fuelling events was between 206 kN and 226 kN, roughly 5% greater than in case study A.
The fuelling time was 4.9 minutes (SD = 0.8 min) for case study A and 4.7 minutes (SD = 1.2 min) for case study B.
Hooking
The full dataset shows differences in hooking time between the two sites and between failed attempts because of overweight loads versus successful hooking attempts. As a result, Scheffe's multiple comparison test was done to verify if the hooking time means were statistically significantly different (). In both case studies, a failed attempt caused a significant increase of hooking time (62% in case study A and 70% in case study B). The statistical test also showed that the hooking time when any failed attempts occurred was c. 23% higher for case study B than in A. The test also confirmed that when at least one failed attempt occurred, the hooking time for case study B was 30% higher than in A.
Table 4. Mean hooking times (in seconds) for both case studies.
Wood density and moisture content
Case study A had an average wood density of 842 kg m−3 and a moisture content of 53.2% (wet), while in case study B the wood density and moisture content were 382 kg m−3 and 14.4% (wet), respectively.
Time distribution
The time studies analyzed 13.4 hours of data in scenario A and 14.5 hours of data in scenario B. The time distribution of the field surveys are presented in and
Figure 4. Time distribution for case study A employing an Aérospatiale LAMA SA315 B light-lift helicopter.
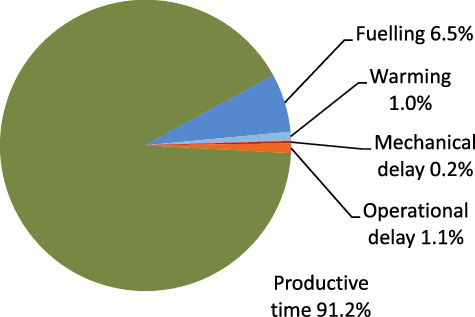
Figure 5. Time distribution for case study B using a Eurocopter AS 350 B3 Ecureuil light-lift helicopter.
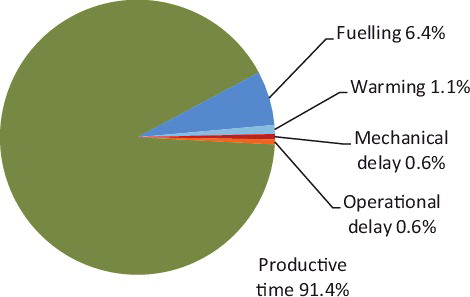
Both case studies exhibit a high percentage of productive time (>90%) with fuelling representing a consistent part of the time (c. 6.5% in both cases) and operational as well as mechanical delays being minimal. In both case studies, mechanical delays were caused by the interruption of electronic communication with the automatic hook systems. The operational delays were mostly related to transportation of materials to the crews (i.e., hooking and unhooking of chainsaws or fuels) and to the repositioning of timber unhooked in the landing area.
Focusing on the productivity time distribution, which excludes any landing time or any other activities not involved in lifting of logs, hooking was found to be a significant element. In case study A, 23% of the productive time was spent hooking, while in case study B hooking was responsible for nearly 29% of the productive time. The unhooking time was comparable in both case studies, consuming about 8% of productive time. In terms of flying time from the landing to the hooking point, the percentage of productive time allocated to this task was higher for case study A (33%) than for B (29%). In both scenarios, the proportion of time spent flying while returning to the landing was slightly higher than the proportion of time allocated to flying unloaded to the hooking points: 35%, and 34% for case studies A and B, respectively.
The covariance analysis reports the importance of the different co-variables and factors in both the case studies ().
Table 5. Factors influencing the turn time.
The variation in the turn time was fairly well explained for case study A (R2 = 67.7%) and for case study B (R2 = 78.7%) through the co-variables hooking (Hk), chokers return (Ck), load (Load), flying distance from landing to hooking point (DistFlyIn), and change in elevation between landing and hook points (ElevChange) (). Other remaining co-variables were removed as they were not significant.
Hooking explained about 27% of the variance in case study A and 17% in case study B. The flying distance from the hooking points to landings was also an important variable, explaining more than 45% of the variance in case study B and c. 13% in case study A. Elevation change had a greater influence in case study A. Similarly, payload revealed a greater effect in case study A (4.2%) than in case study B (2%).
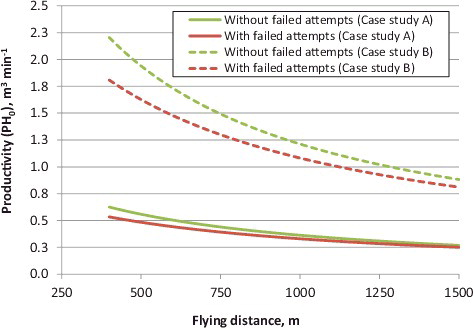
The resulting time consumption models () were used to define productivity in terms of the extracted volume (m3) divided by the total turn time. reports the productivity of the two case studies according to horizontal distances covered by the helicopter from the hooking point to the landing site with a chord slope of 25%.
Table 6. Productivity models (PH0) equation for both case studies.
Figure 6. System productivity (PH0) according to the hooking attempts for the high value timber extraction in case study A when considering a weight load of 8.3 kN, chord slope of 25%, and wood density of 841 kg m−3 and for fire and insect damaged timber in case study B when considering a weight load of 8.3 kN, chord slope of 25%, and wood density of 321 kg m−3.
Discussion
The commonplace use by typical small-scale harvesting operations of close-to-nature forestry management conditions for helicopter logging in the Italian Alps are similar to those of other mountainous regions of Europe (Heinimann and Caminada Citation1996), Austria (Stampfer et al. Citation2002), and Slovakia (Messingerová and Tajboš Citation2006).
The results of this study confirm that the average turn time for a light-lift helicopter being used over a 1000 m extraction flying distance is c. 2.2 minutes, as was found by Heinemann and Caminada (Citation1996). Also, Stampfer et al. (Citation2002) tested a medium-lift helicopter with maximum payload of 27 kN in mountainous conditions in Austria. In their study, the average payload turn was found to be higher (c. 20 kN) than in the current study, but payload utilizations (74%) were nearly equivalent. In addition, turn times in the current study, including choker returns to the hooking area, were 7%–9% longer per turn in both the case studies. This value appears to be significantly lower than the percentage reported by Stampfer et al. (Citation2002) and Heinimann and Caminada (Citation1996), who reported 20%–25% for turn times.
Fuelling time was found to be c 4–6 minutes. In both cases, the fuelling time was less than the fuelling time required for a medium-lift helicopter (Stampfer et al. Citation2002), where fuelling took approximately 7–10 minutes for every hour of flight.
Felling and bucking in case study A was done 10 days before helicopter extraction and, as such, the wood's moisture content as well as its density showed relatively high values. In contrast, in case study B, the wood had already been dried due to bark beetles, fire damage, and because of the full southern aspect of the stand. However, for both case studies, time distributions proved robust and logging operations did not suffer any major delays or setbacks. In any case, the two scenarios were significantly different in terms of their productivities. This could be attributed to the dissimilarity of wood densities and moisture contents, or to the different payload capacities of the helicopters.
A comparison of the productivities obtained by the light-lift helicopters used in our study to those reported using a medium-lift helicopter (Stampfer et al. Citation2002) reveals that the productivity of a light-lift helicopter can be 35%–40% lower than that of a medium-lift helicopter where an experienced pilot is transporting a 1 m3 load over a horizontal distance of 400 m in operative conditions similar to case study A.
Relating these findings to cost, we found that light-lift helicopters are actually less expensive and more productive than medium-lift helicopters. In fact, the cost of a light-lift helicopter (included the cost of the pilot and ground crew) is c. 24 € min−1 for the Aérospatiale LAMA SA315 B and c. 28 € min−1 for the Eurocopter AS 350 B3 Ecureuil, while for a medium-lift helicopter such as the K-MAX tested by Stampfer et al. (Citation2002), the cost is nearly 106 € min−1 (Regione del Veneto Citation2012).
Conclusions
The objective of this study was to analyze the productivity of light-lift helicopters in two different cases (i.e., the extraction of high value timber and the extraction of wood damaged both by fires and subsequent bark beetle attack) using a newly developed methodology employing integrated GNSS data with video recordings. The acquired data and the resulting analysis focused on the hooking operation since it is one of the most critical working elements of helicopter logging.
The proposed method of data collection was applied to two separate operational conditions: (i) helicopter logging of high value timber; and (ii) helicopter logging of timber subjected to bark beetle attack as well as fire damage. In both cases, the analysis highlighted that productivity depends significantly on the hooking operation. The preparation of loads plays an important role in the efficiency of the extraction of the loads. In fact, the hooking time was found to be higher when extracting damaged timber because of the greater challenge in preparing balanced loads by the crew with these types of logs. The extracted trees were often longer than 10 m, were partially dried, and had an irregular wood density. In this situation, load aborts reduced the productivity of the associated helicopter extraction. In comparison, for the high value timber extraction scenario, wood density and moisture content were more consistent among logs and the logs had more uniform dimensions, making extraction less challenging and hence more productive.
Disclosure statement
No potential conflict of interest was reported by the authors.
Additional information
Funding
References
- Akay AE, Sessions J, Bettinger P, Toupin R, Eklund A. 2006. Evaluating the salvage value of fire-killed timber by helicopter: effects of yarding distance and time since fire. West J Appl For. 21:102–107.
- Baldini S. 1977. Prove preliminari di esbosco con elicottero [Preliminary study on helicopter logging]. Monti e Boschi. 28:53–59.
- Bernard M, Kondak K, Hommel G. 2008. A slung load transportation system based on small size helicopters. In: Mahr B, Huanye S, editors. Autonomous systems – self-organization, management, and control. SE: Springer Netherlands; p. 49–61.
- Bigsby H, Ling P. 2013. Long-term productivity of helicopter logging in Sarawak. Int J For Eng. 24:24–30.
- Björheden R. 1991. Basic time concepts for international comparisons of time study reports. Int J For Eng. 2:33–39.
- Cavalli R, Grigolato S. 2010. Influence of characteristics and extension of a forest road network on the supply cost of forest woodchips. J For Res. 15:202–209.
- Christian LE, Brackley AM. 2007. Helicopter logging productivity on harvesting operations in southeast Alaska, using ecologically based silvicultural prescriptions. West J Appl For. 22:142–147.
- Ciesa M, Grigolato S, Cavalli R. 2014. Analysis on vehicle and walking speeds of search and rescue ground crews in mountainous areas. J Outdoor Recreat Tour. 5–6:48–57.
- Dykstra DP. 1976. Production rates and costs for yarding by cable, balloon, and helicopter compared for clear cuttings and partial cuttings. Bulletin Research 22. Corvallis (OR): Forest Research Laboratory School of Forestry Oregon State University.
- Faccoli M, Finozzi V, Gatto P. 2011. Sanitation felling and helicopter harvesting of bark beetle-infested trees in alpine forests: an assessment of the economic costs. For Prod J. 61:675–680.
- Gallo R, Grigolato S, Cavalli R, Mazzetto F. 2013. GNSS-based operational monitoring devices for forest logging operation chains. J Agric Eng. 44:140–143.
- Grigolato S, Pellegrini M, Cavalli R. 2013. Temporal analysis of the traffic loads on forest road networks. IForest. 6:255–261.
- Hartsough BR, Lambert MB, Miles JA. 1985. Airship logging: parameters affecting load factors. T ASAE. 28:1363–1366.
- Hartsough BR, Miles JA, Lambert MB. 1986. Simulating changes to helicopter logging operations. T ASAE. 29:1228–1231.
- Heinimann HR, Caminada L. 1996. Helicopter logging in Switzerland. Analysis of selective logging operations. Proceedings of a joint symposium of IUFRO 3.06 Forest Operations under Mountainous Conditions and the 9th Pacific Northwest Skyline Symposium; 1996 May 13–16; Campbell River (BC-Canada): Forest Engineering Research Institute of Canada.
- Holzleitner F, Kanzian C, Stampfer K. 2011. Analyzing time and fuel consumption in road transport of round wood with an onboard fleet manager. Eur J For Res. 130:293–301.
- Horcher A, Visser R. 2011. Using on-board GPS to identify training needs of helicopter pilots. Croat J For Eng. 32:481–488.
- IFNC. 2005. Inventario Nazionale delle Foreste e dei Serbatoi Forestali di Carbonio [National Inventory of Forest and Carbon Sink]. MiPAF – Ispettorato Generale del Corpo Forestale dello Stato, Trento: CRA-ISAFA. 653 p.
- Messingerová V, Tajboš J. 2006. Technological and environmental parameters of helicopter timber extraction in Slovakia. Croat J For Eng. 27:123–133.
- Pellegrini M, Ackerman P, Cavalli R. 2013. On-board computing in forest machinery as a tool to improve skidding operations in South African softwood sawtimber operations. South For a J For Sci. 75:89–96.
- Proto AR, Zimbalatti G. 2015. Firewood cable extraction in the southern Mediterranean area of Italy. Forest Sci Technol. (Article in press)
- Regione del Veneto. 2012. Prezziario regionale agro-forestale [Regional price list for agriculture and forestry]. Venezia: Regione del Veneto. 45 p.
- Regione Lombardia. 2013. Forest utilization regional inventory data. [S.I.Ta.B Information system on forest utilization]. Milano: Sistemi Verdi e Paessaggio, Regione Lombardia; [cited 2014 Jan 20]. Available from: http://www.cartografia.regione.lombardia.it/
- Simwanda M, Wing MG, Sessions J. 2011. Evaluating global positioning system accuracy for forest biomass transportation tracking within varying forest canopy. West J Appl For. 26:165–173.
- Spinelli R, Magagnotti N, Facchinetti D. 2013. Logging companies in the European mountains: an example from the Italian Alps. Int J For Eng. 24:109–120.
- Stampfer K, Gridling H, Visser R. 2002. Analyses of parameters affecting helicopter timber extraction. Int J For Eng. 13:61–68.
- Tomazin I, Kovacs T. 2003. Medical considerations in the use of helicopters in mountain rescue. High Alt Med Biol. 4:479–483.
- Valente C, Spinelli R, Hillring BG. 2011. LCA of environmental and socio-economic impacts related to wood energy production in alpine conditions: Valle di Fiemme (Italy). J Clean Prod. 19:1931–1938.
- Veal MW, Taylor SE, McDonald TP, McLemore DK, Dunn MR. 2001. Accuracy of tracking forest machines with GPS. T ASAE. 44:1903–1911.
- Wang J, Grushecky ST, McNeel J. 2005. Production analysis of helicopter logging in West Virginia: a preliminary case study. For Prod J. 55:71–76.
- Zimbalatti G, Proto AR. 2009. Cable logging opportunities for firewood in Calabrian forests. Biosyst Eng. 102:63–68.