
Abstract
This paper presents a new terminal sliding-mode control (TSMC) for the micro electro-mechanical systems (MEMS) z-axis gyroscope. However, TSMC may chatter when uncertainty values are overestimated or may exhibit a steady-state error when uncertainty values are underestimated. In this paper, an adaptive fuzzy terminal sliding-mode controller is designed to retain the advantages of the terminal sliding-mode controller and to reduce the chattering occurred with the terminal sliding-mode controller. Stability analysis of the TSMC is presented in the presence of external disturbance and model uncertainties. Moreover, an extended Kalman filter (EKF) observer is designed to estimate the angular velocity and all of the gyroscope parameters and convergence analysis of the proposed EKF algorithm is presented. Numerical simulations using the nonlinear dynamic model of an MEMS z-axis gyroscope with uncertainties demonstrate the effectiveness of the approach in fast trajectory tracking problems and robustness in estimating the gyroscope parameters and also the angular velocity.
1. Introduction
Micro electro-mechanical systems (MEMS) gyroscope, which is one of the micro-machined inertial sensors, and commonly used to measure the angular velocity in many areas including platform stabilization in space applications, activity monitoring in biomedical applications, sport equipment in consumer applications, robotics and machine and vibration monitoring in industrial applications, monitoring mechanical shock and vibration during transportation in automotive applications (Batur, Sreeramreddy, & Khasawneh, Citation2006; Fei & Batur, Citation2009).
Vibrational MEMS gyroscopes are capable of vibrating along two orthogonal axes and energy is transferred from one axis (referred to as drive axis) to the other axis (referred to as sense axis) through Coriolis forces, which is arising from a rotating reference frame and proportional to its rotation rate. The conventional mode of operation drives one of the axes of the gyroscope into a known oscillatory motion and then detects the Coriolis acceleration coupling along the sense axis, which is orthogonal to the drive axis. The response of the sense mode provides information about the unknown angular velocity. However, in practice, the fabrication imperfections and environmental variations are always present, resulting in parameter changes, mechanical couplings between two axes, and different kinds of noises along the axes which will degrade the sensitivity of the gyroscope. The angular velocity measurement and minimization of the cross coupling between two axes are challenging problems in vibrating gyroscopes. As a consequence, some kind of advanced control method is essential for improving the performance and stability of MEMS gyroscopes.
Over the last years, sliding-mode controllers have been proposed to control the MEMS gyroscope. Batur et al. (Citation2006) developed a sliding-mode control for an MEMS gyroscope system combined with a force balancing control strategy to identify angular velocity. Fei and Batur (Citation2009) derived an adaptive sliding-mode control (ASMC) with Proportional-Integral sliding surface for an MEMS gyroscope in order to enable the system to track the desired trajectory or reference model and to identify its angular velocity, but chattering phenomena still was a problem. Moghanni-Bavil-Olyaei, Ghanbari, and Keighobadi (Citation2012) presented an adaptive fuzzy sliding-mode control (AFSMC) for an MEMS gyroscope to attenuate the chattering by replacing the discontinuous part in the reaching mode with a fuzzy logic control. However, faster trajectory tracking and convergence rate may be desired.
Terminal sliding-mode control (TSMC) is a particular case of the higher order sliding-mode control. This technique has been studied to further improve the control performances. Essentially, to achieve finite-time convergence and to give an asymptotic stability, in addition, it is an adequately solution of the systems with high order degrees. However, it has a major drawback of the sliding-mode control techniques such as the chattering phenomena (Cao, Chen, Chen, Zhao, & Fan, Citation2012; Nekoukar & Erfanian, Citation2011; Tzuu-Hseng & Yun-Cheng, Citation2010). Drawback of the chattering is significant in practical applications because it leads, e.g. to high moving of mechanical parts and heat losses in electrical power circuits. In the last few years, many applications have been developed for the improvement of the performance of the combination of fuzzy control, TSMC and adaptive control (Nekoukar & Erfanian, Citation2011; Tao, Taur, & Chan, Citation2004; Tzuu-Hseng & Yun-Cheng, Citation2010). Fuzzy control is a somewhat intelligent, cost-effective nonlinear control which can approximate any nonlinear function to any desired accuracy because of the universal approximation property (Passino & Yurkovitch, Citation1998). The main idea for the integration of the fuzzy idea and TSMC approach is to reduce the chattering phenomena which often occur in the sliding-mode control systems because of high frequency switching and it will often excite undesired dynamics of the system. A TSMC has been proposed for the MEMS gyroscope (Saif, Ebrahimi, & Vali, Citation2011), but the paper does not concern with input disturbances and uncertainties as well. Also, chattering has not been attenuated significantly.
On the other hand, an efficient observer is needed to measure the angular velocity through the control system. Kalman filter is an optimal estimator which minimizes the estimation error variance in the presence of the noises in measurement and inside the system (Shaked & De-Souza, Citation1995).
In this paper, we present a new TSMC for an MEMS z-axis gyroscope by concerning the input disturbances and uncertainties which uses a nonlinear sliding surface. Then, Fuzzy system is employed to approximate the sliding-mode reaching law. An extended Kalman filter (EKF) is derived for online updating the gyroscope parameters of the model and the angular velocity so that closed-loop stability and finite-time convergence of tracking errors and its derivatives can be guaranteed.
This paper is organized as follows: In Section 2, the mathematical model and the dynamics of an MEMS gyroscope is described. In Section 3, the adaptive fuzzy terminal sliding-mode control (AFTSMC) is developed. Section 4 presents an EKF observer to estimate the angular velocity and all of the gyroscope parameters. Simulation results are provided to validate the effectiveness of the proposed control system in Section 5. Conclusions are drawn in Section 6.
2. MEMS vibrational gyroscope model
2.1 Dynamics of MEMS gyroscope
The schematic of an MEMS z-axis gyroscope is shown in . This vibratory gyroscope includes a proof mass suspended by springs, an electrostatic actuation and sensing mechanisms for forcing an oscillatory motion and sensing the position and velocity of the proof mass. It is assumed that the table where the proof mass is mounted moves with a constant velocity and the gyroscope rotates at a slowly changing angular velocity about z-axis. The Coriolis force is generated in a direction perpendicular to the driving and rotational axes.
Figure 1. Dynamical model of MEMS z-axis gyroscope.
By using Lagrange's equation and with the assumptions stated above, the dynamics of gyroscope become as follows:
Dividing gyroscope dynamics (1) and (2) by the reference mass results in the following vector forms as
2.2 System description and control objectives
Consider the dynamics with parametric uncertainties and external disturbance as follows:
Assumption: The matched and unmatched lumped uncertainty and external disturbance Δ F and dm are bounded by known positive parameters δ, such that
and
.
The control target for an MEMS gyroscope is to maintain the proof mass to oscillate in x and y directions at frequencies ω1 and ω2 and at amplitudes A1 and A2, respectively. These requirements can be stated as and
. The purpose of the control scheme is to establish conditions that the unknown angular velocity Ωz can be estimated. Equivalently, the control objective can be stated in terms of a reference model as follows:
The tracking error and its derivative are given as follows:
3. Adaptive fuzzy terminal sliding-mode control
3.1 TSMC design
In order to maintain the proof mass to track a smooth desired trajectory qm in Equation (8), which includes desired proof mass oscillations in the actuation and sensing directions at given frequencies and amplitudes, the terminal sliding manifold is defined as follows:
Substituting Equation (13) into Equation (7) yields
3.2 Stability analysis
The stability and robustness analysis of the proposed TSMC law in the presence of the matched and unmatched uncertainties and disturbances is accomplished by choosing a Lyapunov function as
However, the differentiation of the terminal sliding surface in the stability derivation process will result in the singular condition due to the condition . But this control system presents the chattering problem caused by Ks and discontinuity of the sign function of the SMC at the reaching phase. In order to resolve this drawback, we will replace the reaching law
by the fuzzy logic system which will be presented in the following section.
3.3 Adaptive fuzzy terminal sliding-mode control design
In order to remove the charting phenomena caused by the discontinuous part of , we aim to replace the constant Ks of commutation of discontinuous control parameter by the auto adjustable gain generated by the fuzzy logic controller and the sign function by another fuzzy logic controller.
The reaching law is designed as
In order to choose the membership functions, the basic problem is to break the 0–1 modeling. Triangular membership functions are the first choices in every problem. However, if the situation is complex and deep, we might need a special type of membership function (Ross, Citation2010). In our problem, triangular membership functions can solve the difficulties. The ranges of the membership functions are selected based on a trial-and-error approach. The membership functions of input linguistic variables s(t) and and the membership functions of output linguistic variables uf (t) and Kf are shown in and , respectively. They are decomposed into seven fuzzy partitions expressed as NB (Negative Big), NM (Negative Medium), NS (Negative Small), Z (Zero), PS (Positive Small), PM (Positive Medium) and PB (Positive Big). The fuzzy control surface of the output uf (t) is shown in . The fuzzy rules are extracted in such a way that the stability of the system would be satisfied and these rules contain the input–output relationships that define the control strategy. The linguistic fuzzy rules are defined heuristically in the following generic form:
where
,
and Bi are the membership functions in the ith IF–THEN rule corresponding to the input and output fuzzy sets, respectively. In the fuzzy inference engine, the intersection minimum and the center average defuzzification operations are used.
Figure 2. Membership functions (a) sliding surface, (b) derivative of sliding surface and (c) reaching control.

Figure 3. Membership functions (a) error, (b) rate of error and (c) reaching control gain.

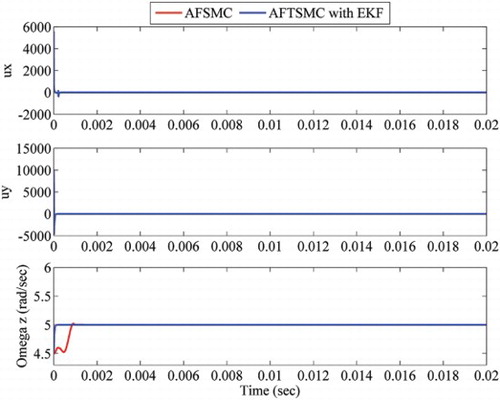
Figure 4. Control forces by AFTSMC and comparison of adaptations by AFSMC and AFTSMC with EKF.
The IF–THEN rules of the MEMS gyroscope system are represented in and . In the fuzzy rule table, the rules are designed such that the following points are taken under consideration:
Table 1. Rule base of AFSMC.
Table 2. Rule base for adaptation of the reaching control gain Kf.
Table 3. The MEMS gyroscope parameters used in simulation.
(1) The output fuzzy sets are normalized in the interval (−1, 1), then
.
(2) When the product
This condition is required to achieve the system stability.
The AFTSMC law has been represented as follows:
4. Angular velocity estimation via EKF
It is known that the Kalman filter estimates the states of a linear system with additive state and output noises (Grover & Hwang, Citation1992). Due to the fact that the MEMS gyroscope dynamics equations are nonlinear, an EKF is required (Simon, Citation2006). The EKF is a discrete algorithm to estimate nonlinear dynamics affected by noise. Consider the nonlinear discrete dynamic system
We assume that the changes of parameters of the gyroscope are not as much as the angular velocity and we assume that they are known constants. By neglecting the centrifugal forces and cubic type stiffness, the linear dynamics of an MEMS z-axis gyroscope (7) is written in the following form:
Defining the extended state vector as
4.1 Convergence analysis
In this subsection, we consider the convergence analysis of the algorithm. The dynamics of the a priori estimation error is governed by the following difference equation:
Assumption 1 A(k+1) is non-singular for all k.
Assumption 2 There exists a, c, κ>0 such that ,
and
, i.e. matrices A(k+1), H(k+1) and K(k+1) are uniformly bounded.
Assumption 3 There exists p1, p2>0 such that and
.
Then, by defining matrices
the following inequality can be proved using the matrix inversion lemma and the Riccati equations (Reif & Unbehauen, Citation1999)
5. Simulation results
In this section, the performance of the proposed AFTSMC on a lumped MEMS gyroscope model is evaluated using simulation results in MATLAB/SIMULINK for tracking and estimating the angular rate, Ωz, and gyroscope parameters. Results of simulations are shown in . The simulation results are compared with the results of adaptive fuzzy SMC (Moghanni-Bavil-Olyaei et al., Citation2012).
The desired motion trajectories are and
, where
and
. The modeling uncertainties, Δ F are considered as:±3% change in the spring and damping coefficients from corresponding nominal values, ±2% changes in the magnitude of coupling terms dxy and ωxy, and ±5% variations of Ωz, which are modeled as random variables with zero mean and unity variance. The unknown angular velocity, Ωz, is assumed to have an amplitude of 5.0 rad/s. Initial values for the reference model states are as follows:
which are all in meters or meter per seconds. Parameters of the MEMS gyroscope are given in . Terminal sliding surface parameters are designed such that
,
, α=9 and β=5. Parameters of the observers are tuned as follows:
with initial guess
As shown in , the chattering-free control effort and estimation performance of the proposed controller is significantly superior compared with that of the previous methods which makes it possible to achieve a faster response.
6. Conclusions
In this paper, we have considered a novel control system with novel observation system for an MEMS z-axis gyroscope, where it has been successfully applied for the control of the axes of the MEMS gyroscope on the desired directions and to estimate the unknown angular velocity and all of gyroscope parameters. The design has been proved to guarantee the closed-loop stability in the sense of Lyapunov method. It has been verified that the proposed controller has superior tracking performance and robustness to conventional ASMC and AFSMC in estimating the gyroscope parameters and also the angular velocity in the presence of input disturbances and model variations. Future works can be on the estimation of time-varying angular velocities.
REFERENCES
- Batur, C., Sreeramreddy, T., & Khasawneh, Q. (2006). Sliding mode control of a simulated MEMS gyroscope. ISA Transactions, 45(1), 99–108. doi: 10.1016/S0019-0578(07)60069-X
- Boutayeb, M., Rafaralahy, H., & Darouach, M. (1997). Convergence analysis of the extended Kalman filter used as an observer for nonlinear deterministic discrete-time systems. IEEE Transactions on Automatic Control, 42(4), 581–586. doi: 10.1109/9.566674
- Cao, L., Chen, Y., Chen, X., Zhao, Y., & Fan, J. (2012). The design and analysis of non-singular terminal adaptive fuzzy sliding-mode controller. American Control Conference (ACC’12), Montreal, Canada, pp. 4625–4630.
- Fei, J., & Batur, C. (2009). A novel adaptive sliding mode control with application to MEMS gyroscope. ISA Transactions, 48, 73–78. doi: 10.1016/j.isatra.2008.10.008
- Grover, R., & Hwang, P.Y. (1992). Introduction to random signals and applied Kalman filtering (2nd ed.). New York, NY: John Wiley and Sons.
- Moghanni-Bavil-Olyaei, M.-R., Ghanbari, A., & Keighobadi, J. (2012). Intelligent Robust nonlinear controller for MEMS angular rate sensor. Sensors & Transducers Journal, 141(6), 92–105.
- Nekoukar, V., & Erfanian, A. (2011). Adaptive fuzzy terminal sliding mode control for a class of MIMO uncertain nonlinear systems. Fuzzy Sets and Systems, 179, 34–49. doi: 10.1016/j.fss.2011.05.009
- Passino, K. M., & Yurkovitch, S. (1998). Fuzzy control. Menlo Park, CA: Addison Wesley Longman.
- Reif, K., & Unbehauen, R. (1999). The extended Kalman filter as an exponential observer for nonlinear systems. IEEE Transactions on Signal Processing, 47(8), 2324–2328. doi: 10.1109/78.774779
- Ross, T. J. (2010). Fuzzy logic with engineering applications (3rd ed.). Chichester: John Wiley & Sons.
- Saif, M., Ebrahimi, B., & Vali, M. (2011). Terminal sliding mode control of Z-axis MEMS gyroscope with observer based rotation rate estimation. American Control Conference (ACC’11), San Francisco, CA, pp. 3483–3489.
- Shaked, U., & De-Souza, C. E. (1995). Robust minimum variance filtering. IEEE Transactions on Signal Processing, 43(11), 2474–2483. doi: 10.1109/78.482099
- Simon, D. (2006). Optimal state estimation: Kalman, H [infinity] and nonlinear approaches. New York, NY: Wiley-Interscience.
- Slotine, J. J. E., & Li, W. (1991). Applied nonlinear control. Englewood Cliffs, NJ: Prentice-Hall.
- Tao, C. W., Taur, J. S., & Chan, M. L. (2004). Adaptive fuzzy terminal sliding mode controller for linear systems with mismatched time-varying uncertainties. IEEE Transactions on Systems, Man, and Cybernetics-Part B: Cybernetics, 34(1), 255–262. doi: 10.1109/TSMCB.2003.811127
- Tzuu-Hseng, S. L., & Yun-Cheng, H. (2010). MIMO adaptive fuzzy terminal sliding-mode controller for robotic manipulators. Information Sciences, 180, 4641–4660. doi: 10.1016/j.ins.2010.08.009