
Abstract
Adaptive synchronization of fractional-order memristor-based Chua's circuit is discussed in this paper. Two adaptive synchronization schemes are presented for the fractional-order memristor-based Chua's circuit based on the stability theory of fractional-order differential system, the drive–response concept and the adaptive control principle. Also the case of only one parameter known and the case of all the other parameters fully unknown are discussed. The results show that controller parameters can be adjusted to enhance the convergence rate of the error system. Finally, numerical simulations are drawn to demonstrate these results.
1. Introduction
As Professor Chua pointed in 1971 (Chua, Citation1971), memristor is considered as the missing fourth passive circuit element. It has attracted many scientists to investigate the property of the memristor-based systems. The memristor-based systems (El-Sayed, Elsaid, Nour, & Elsonbaty, Citation2013; Wang, Wang, & Tan, Citation2011) display abundant dynamical behaviors such as bifurcation, chaos and so on, which are very complicated and have already been applied in other fields such as secure communication (Kinzel, Englert, & Kanter, Citation2010). Also researchers have discussed dynamical behavior and stability analysis of the fractional-order memristor-based Chua's circuit in Petráš (Citation2010a). This system exhibits chaos phenomena under some special conditions. As an important and interesting behavior, synchronization has extensively been investigated. Many researchers have studied the synchronization of chaotic systems by adopting many schemes such as feedback control (Wu, Wen, & Zeng, Citation2012), impulsive control (Zhong, Yu, & Yu, Citation2010), sliding mode control (Yau, Citation2004), backstepping method (Song, Shen, & Chang, Citation2011) and so on. System structure and parameters are usually known in most methods. However, in fact, some parameters are uncertain or unavailable. Adaptive control principle (Wen, Zeng, & Huang, Citation2012) can be used to estimate the uncertain parameters of the system.
Motivated by the above discussion, two adaptive synchronization schemes are proposed for the fractional-order memristor-based Chua's circuit. In this paper two cases of only one parameter known and all the other parameters unknown are discussed. Also different controller functions and parameter update rules are proposed. The simulation results show that the parameters in the update rules can be chosen to enhance the convergence rate. This method can also be applied in the chaotic system without a memristor.
2. Fractional-order memristor-based systems
The fractional-order operator is the generalization of integer-order operator. There are three commonly used definition of the fractional-order differential operator: Grunwald–Letnikov, Riemann–Liouville and Caputo. These definitions can be found in Ding, Wang, and Ye (Citation2012), Dong, Wang, and Gao (Citation2013), Hu, Wang, Shen, and Gao (Citation2013) and Kan, Wang, and Shu (Citation2013). In this paper, we will study the dynamical behavior of fractional-order system with the Grunwald -Letnikov (GL) definition, which is defined as
where [·] means the integer part. Therefore, in the rest of this paper, the notation Dq is chosen as GL fractional derivative operator
for brevity's sake. General numerical solution of the fractional differential equation
can be expressed as
where parameters are binomial coefficients, which is calculated with the following formula (Monje, Chen, Vinagre, Xue, & Feliu, Citation2010):
For the memory term expressed in the above equation, we put v=1 for all k. In order to investigate the dynamical behavior, we will employ the following lemma.
lemma[(Zhao, Hu, & Liu, Citation2010)] 1
For fractional-order system Dqx=f(x), when fractional order q≤1, if there exists one positive matrix P such that function holds, the state x is asymptotically stable.
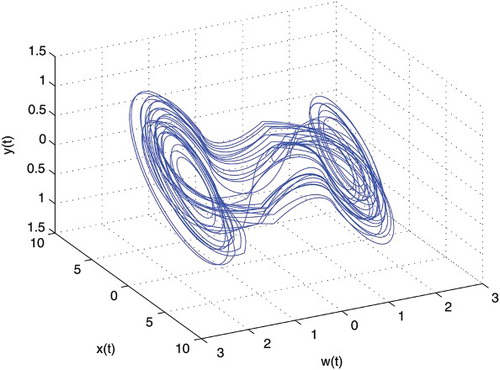
A new fractional-order memristor-based Chua's circuit has been proposed in Petráš (Citation2010a):
Figure 1. Strange attractor of the memristor-based Chua's system (1).
3. Adaptive synchronization
Let system (1) be the drive system. In this section, according to the property of parameter α, we discuss two cases. Suppose other parameters are unknown.
3.1 Parameter α known
The response system is as follows:
Theorem 1
For error system (3), when parameters are properly chosen so that the following linear matrix inequality holds:
Proof From Lemma 1, one can choose J function as follows:
where
,
Then function J along trajectories of Equation (3) is calculated as
where Q1 is given in Equation (6). From Lemma 1, J function is negative, which implies that the state variables e1, e2, e3 and e4 are asymptotically stable and parameters
and eζ are estimated with controller functions (4) and update rules (5). Thus response system (2) is synchronized with drive system (1).
3.2 Parameter α unknown
When parameter α is unknown, the response system is given by
Theorem 2
For error system (8), when parameters are properly chosen so that the following linear matrix inequality holds:
Proof From Lemma 1, one can choose another J function as follows:
where
,
The similar proof can be referred to Theorem 1. Thus the response system (7) is synchronized with the drive system (1).
4. Numerical example
The numerical simulation is carried out by using the approximation on Grunwald–Letnikov method proposed in Petráš (Citation2010b). And for the memory terms, a short memory principle is used.
4.1 Simulation with known α
The initial states of the drive system and the response system are and
, respectively. The parameters of the drive system are
and q=0.97. Choose
and k4=2.5, the eigenvalues of matrix Σ1 are −13.0831,−7.0534, −2.4484 and −0.9151. Also we choose k5=1, k6=1 and k7=1. This can guarantee that the matrix Q1 is negative. In addition, the initial values of parameters
and eζ are
and
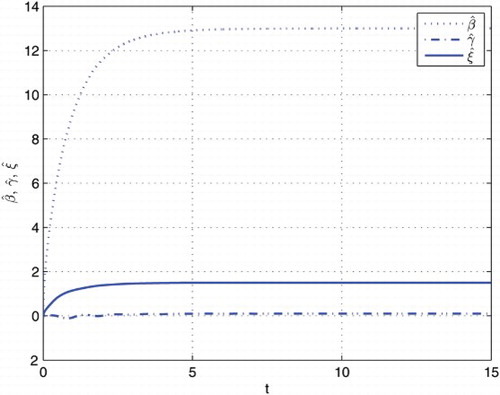
, respectively. Then the adaptive error states e1, e2, e3 and e4 and unknown parameters curve of
and ζˆ are drawn in and , respectively.
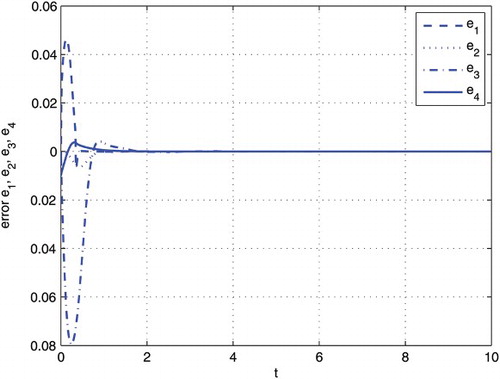
Figure 2. Synchronization errors e1, e2, e3 and e4 with known α and θ=1, λ=1, τ=1.
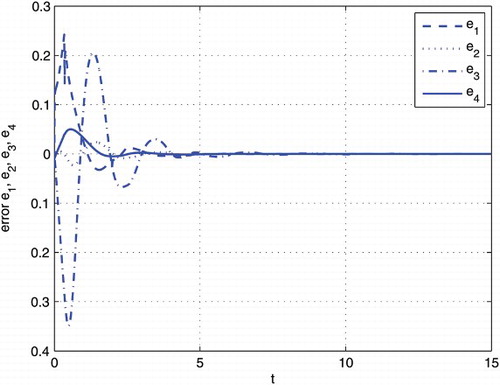
Figure 3. Unknown parameters curve of βˆ, γˆ and ζˆ with known α and θ=1, λ=1, τ=1.
4.2 Simulation with unknown α
For unknown α, from Theorem 2, the similar parameters are the same as that in Section 4.1. Moreover, parameters are chosen as and k4=2.5. Then the eigenvalues of matrix Π1 are
and −0.8261. Also we choose
and k8=1. This can guarantee the matrix Q2 is negative. Take
and τ=1. Then the synchronization errors e1, e2, e3 and e4 and unknown parameters of
and ζ are drawn in and , respectively.
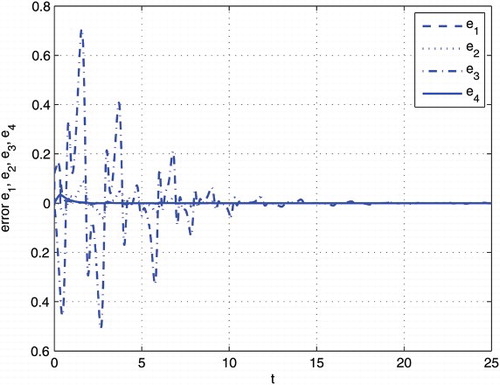
Figure 4. Synchronization errors e1, e2, e3, and e4 with unknown α and δ=1, θ=1, λ=1 and τ=1.
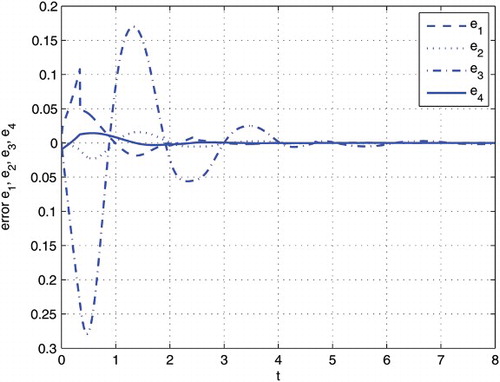
Figure 5. Unknown parameters curve of αˆ, βˆ, γˆ and ζˆ with unknown α and δ=1, θ=1, λ=1 and τ=1.
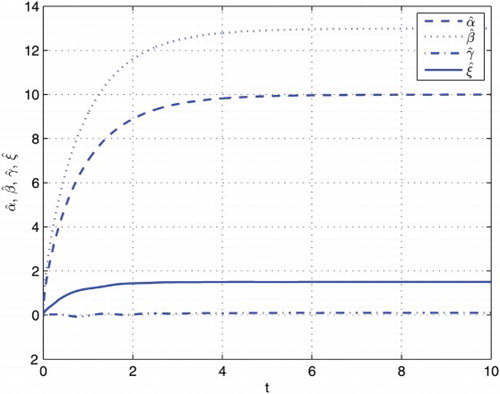
It is obvious that the convergence rate of synchronization errors and parameters and ζˆ are slower. In order to enhance the convergence rate, parameters
and τ are revised as
and τ=5. The corresponding synchronization errors are drawn in .
Figure 6. Synchronization errors e1, e2, e3 and e4 with unknown α and δ=5, θ=5, λ=5 and τ=5.
4.3 Discussion with k5=0, k6=0, k7=0 for known α
describes the synchronization errors with k5=0, k6=0 and k7=0. It is obvious that the convergence rate of synchronization errors are slower than that of k5=1, k6=1 and k7=1. Also in order to enhance the convergence rate, we choose and τ=15.
Figure 7. Synchronization errors e1, e2, e3 and e4 with known α and θ=15, λ=15 and τ=15.
5. Conclusions
With the intensive study on the fractional-order system and the memristor, the investigation on the fractional-order memristor-based system becomes the hot issue. The adaptive synchronization for the fractional-order memristor-based Chua's circuit has been investigated with unknown parameters. Some controller schemes and update rules for unknown parameters have been proposed to guarantee the adaptive synchronization. Finally, numerical simulation has been carried out to show the efficiency of the proposed schemes.
Acknowledgements
The authors are thankful to anonymous viewers for their valuable comments and suggestions to this paper. This work was supported by the National Natural Science Foundation of China under Grants 61304162, 61174216, 61074124, 61273183, 61374028 and the Talent Scientific Research Foundation of China Three Gorges University under Grant KJ2012B075.
REFERENCES
- Chua, L. O. (1971). Memrister – the missing circuit element. IEEE Transaction on Circuit Theory, CT-18, 507–519. doi: 10.1109/TCT.1971.1083337
- Ding, Y., Wang, Z., & Ye, H. (2012). Optimal control of a fractional-order HIV-immune system with memory. IEEE Transactions on Control Systems Technology, 20(3), 763–769. doi: 10.1109/TCST.2011.2153203
- Dong, H. L., Wang, Z. D., & Gao, H. J. (2013). Distributed H∞ filtering for a class of Markovian jump nonlinear time-delay systems over lossy sensor networks. IEEE Transactions on Industrial Electronics, 60(10), 4665–4672. doi: 10.1109/TIE.2012.2213553
- El-Sayed, A. M. A., Elsaid, A., Nour, H. M., & Elsonbaty, A. (2013). Dynamical behavior, chaos control and synchronization of a memristor-based ADVP circuit. Communications in Nonlinear Science and Numerical Simulation, 18, 148–170. doi: 10.1016/j.cnsns.2012.06.011
- Hu, J., Wang, Z. D., Shen, B., & Gao, H. J. (2013). Quantized recursive filtering for a class of nonlinear systems with multiplicative noises and missing measurements. International Journal of Control, 86(4), 650–663. doi: 10.1080/00207179.2012.756149
- Kan, X., Wang, Z. D., & Shu, H. S. (2013). State estimation for discrete-time delayed neural networks with fractional uncertainties and sensor saturations. Neurocomputing, 117, 64–71. doi: 10.1016/j.neucom.2013.01.039
- Kinzel, W., Englert, A., & Kanter, I. (2010). On chaos synchronization and secure communication. Philosophical Transactions of the Royal Society, 268, 379–389. doi: 10.1098/rsta.2009.0230
- Monje, C. A., Chen, Y. Q., Vinagre, B. M., Xue, D. Y., & Feliu, V. (2010). Fractional-order systems and controls: Fundamentals and applications. London: Springer.
- Petráš, I. (2010a). Fractional-order memristor-based Chua's circuit. IEEE Transactions on Circuits and Systems–II: Express Briefs, 57, 975–979. doi: 10.1109/TCSII.2010.2083150
- Petráš, I. (2010b). A note on the fractional-order Volta's system. Communications in Nonlinear Science and Numerical Simulation, 15, 384–393. doi: 10.1016/j.cnsns.2009.04.009
- Song, Y. F., Shen, Y., & Chang, Y. (2011). Chaos control of a memristor-based Chua's oscillator via backstepping method. 2011 International Conference on Information Science and Technology, Nanjing, China, pp. 1081–1084.
- Wang, W. L., Wang, G. Y., & Tan, D. (2011). A new memristor based chaotic circuit. 2011 Fourth International Workshop on Chaos-Fractals Theories and Applications, Hangzhou, China, pp. 57–60.
- Wen, S. P., Zeng, Z. G., & Huang, T. W. (2012). Adaptive synchronization of memristor-based Chua's circuits. Physics Letters A, 376, 2775–2780. doi: 10.1016/j.physleta.2012.08.021
- Wu, A. L., Wen, S. P., & Zeng, Z. G. (2012). Synchronization control of a class of memristor-based recurrent neural networks. Information Sciences, 183, 106–116. doi: 10.1016/j.ins.2011.07.044
- Yau, H. T. (2004). Design of adaptive sliding mode controller for chaos synchronization with uncertainties. Chaos Solitons & Fractals, 22, 341–347. doi: 10.1016/j.chaos.2004.02.004
- Zhao, L. D., Hu, J. B., & Liu, X. H. (2010). Adaptive tracking control and synchronization of fractional hyper-chaotic Lorenz system with unknown parameters. Acta Physica Sinica, 59, 2305–2309.
- Zhong, Q. S., Yu, Y. B., & Yu, J. B. (2010). Fuzzy modeling and impulsive control of a memristor-based chaotic system. Chinese Physics Letters, 27, 020501. doi: 10.1088/0256-307X/27/2/020501