
Abstract
Emitter signal recognition is one of the key procedures in signal processing of electronic intelligence (ELINT). In particular, the identification of radar emitters has been important with the advances in radio frequency, electronics and control technologies. Jitter is an unintentional form of modulation that can have a wide variety of sources. Timing-related data errors will occur if jitter is beyond acceptable limits. Designers need a fast and easy way to obtain a complete characterization of clock jitter in the microprocessor controlled. To enhance the ability of specific emitter identification (SEI) to meet the requirement of modern ELINT, a novel identification approach for radar emitter signals based on type-2 fuzzy classifier is presented in this paper. In fuzzy type-2 sets, the uncertainty is represented as an extra dimension. In this article, we show how it is possible to reduce the effect of SEI-induced highly jittered radar emitters in ELINT, with the classifiers of type-1 and type-2 fuzzy logic. This work discusses the impact of unknown jitter sampling on signal estimation. Based on the ELINT feature extraction of radar emitter signals, the type-2 fuzzy classifier is applied to identification of radar emitters effectively. Experiment results shows that the approach can achieve high accurate classification even at higher error deviation level and has good characteristics of identification.
1. Introduction
Electronic intelligence (ELINT) equipment, use wideband interception channels with omni- or directional antenna systems, with the purpose of acquiring pulsed radar emissions. Data stream is a combination of pulse trains coming from number of emitters. The number of homogenous pulse trains depends on radar transmitter power, sensitivity of ELINT equipment, distance to radar, antennas gain, methods of scanning and propagation conditions. Measurement information is included in so-called pulse descriptor words (PDWs). Each PDW information depicting each particular pulse includes: radio frequency (RF), pulse amplitude (PA), pulse width (PW), pulse repetition interval (PRI), time of arrival, and direction-of-arrival and so on. In these days, mostly, PDWs processing is virtually everywhere. The trend is toward more capable microprocessor-controlled systems that will run at faster and faster clock rates. As clock rates increase, the characterization of timing accuracy and jitter becomes more important. Designers are finding an increased need to characterize jitter in order to achieve error-free design goals. Simply stated, jitter is just noise. The noise causes an uncertainty in the relative position of each clock cycle. Excessive clock jitter can limit the performance of ELINT equipment. Because clock jitter is nothing more than the time variation between the edge of a clock signal and its ideal location in time, most engineers can intuitively relate to the basic definition of jitter. Period jitter is measured in the time domain and is expressed as either the rms or peak to peak of the time variation. Period jitter is defined as the variation in the time difference between the edge of a reference edge and the same edge of the clock uncertainty-interval-valued clock cycles ().
Figure 1. The clock uncertainty interval-valued clock cycles in ELINT modulation.
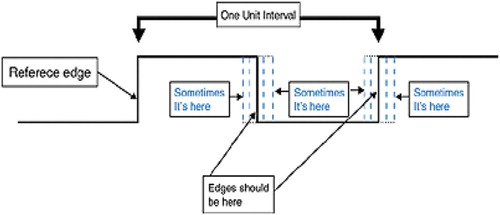
Jitter is an unintentional form of modulation that can have a wide variety of sources. Timing-related data errors will occur if jitter is beyond acceptable limits. Designers need a fast and easy way to obtain a complete characterization of jitter in microprocessor-controlled ELINT. The impact of jitter can vary widely from one application to another. Because jitter takes many forms, it is important for the engineer to understand which jitter measurement and specific emitter identification (SEI) problems are most appropriate for ELINT equipment (Roe, Cussons, & Feltham, Citation1990). For many practical emitter identification (EID) methods, including statistical pattern matching and probabilistic models (Chang, Kim, Ryu, & Kim, Citation2008; Ryoo, Song, & Kim, Citation2007), data clustering (Liu, Lee, Li, Luo, & Wong, Citation2005), fuzzy classification (Hassan, Bhatti, & Latif, 2005), and neural networks (Granger, Rubin, Grossberg, & Lavoie, Citation2001; Rong, Jin, & Zhang, Citation2006; Thakur, Sing, Basu, & Nasipuri, Citation2008) have drawn much attention and been applied in recent years. The statistical pattern recognition methods usually explore statistical properties in the data-set and they perform well when such knowledge is known a priori. These methods are inefficient and time-consuming for solving EID problems. All these often fail to identify signals under high signal density environment, in near real time. Main problems arise from the uncertainty measures which may all decrease the accuracy of classification. Therefore, the primary focus of this paper is on the interpretability and uncertainty of PDWs. Fuzzy logic (FL) has proven its potential for estimating and minimizing the effect of uncertainties that are present in PDWs modeling environment (Rabinovich, Citation2005). This property plays an important role in this work aimed at handling the EID uncertainty dynamics in the given feature space. Recently, many researchers have shown that type-1 (T1) FL had difficulties in modeling and minimizing the effect of uncertainties. One reason is that a type-1 fuzzy set is certain in the sense that the membership grade for a particular input is a crisp value. The type-2 (T2) FL is an emerging methodology that is capable of dealing with more than static imprecision in data (Niewiadomski & Bartyzel, Citation2006). Probability theory is used to handle random uncertainty and fuzzy sets are used to handle linguistic uncertainty, and sometimes fuzzy sets can also be used to handle both kinds of uncertainty, because an FL-based approach may use noisy measurements or operate under random disturbances. A T2 fuzzy set has the capability to provide proper estimation of dispersion in uncertain conditions (Mendel & Wu, Citation2007). T2 fuzzy sets have been used to manage the uncertainties in various domains where the performance of type-1 fuzzy sets is not satisfactory. For instance, Melin and Castillo (Citation2013) used the T2 fuzzy set for handling uncertainty in pattern recognition. It is found that a T2 fuzzy set is capable of handling and minimizing the effect of both linguistic and random uncertainties simultaneously. Hence, it is expected that a T2 fuzzy classifier should explicitly define the rule that governs an effective EID classification. In this work, the concept of an application of a fuzzy classifier designed in the framework of T2 FL to the EID classification problem is developed. Therefore, T2 fuzzy sets are adopted in this research for their simplicity and efficiency to capture the severe uncertainties of EID classification. The work presented in this paper has two main contributions: (1) it devises a novel operation scheme for Type-2 fuzzy classifier and (2) it proposes a computationally efficient classification mechanism for such type of Type-2 fuzzy classifier, which can outperform T1 fuzzy classifier, to make them more suitable for real-time applications. According to the above information and due to existing uncertainty in SEI problem, the design of a T2 fuzzy classifier and its performance are discussed in this paper. Finally, the tests for the robustness of the classifier in the presence of jitter were carried out.
Section 2 outlines the background employed in this work. The SEI data and a feature extraction procedure are described first. Next, we describe the type-2 fuzzy sets. In Section 3, design of a T2 fuzzy classifier and its operation scheme are proposed. In Section 4, the experimental results are presented and discussed. Finally, the paper is concluded and a scope of further work is suggested in Section 5.
2. Background
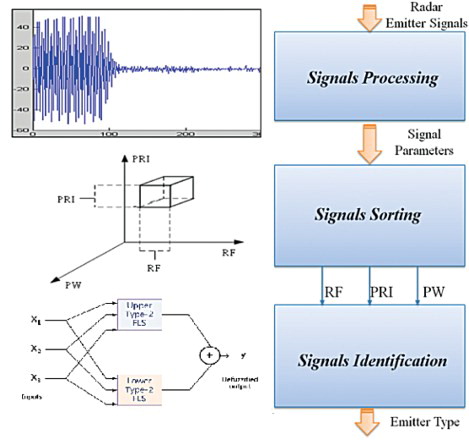
Radars typically emit thousands of pulses every microsecond, and in most scenarios there are many types of radar operating simultaneously interleaving radar pulse trains. The main function of ELINT is the real-time identification of the radar type associated with each pulse train that is intercepted. Current approaches adopted in actual applications are that the incoming emitter signals are sorted into individual pulse trains, and then the characterizations of the pulse trains are compared with a library of parametric descriptions, a list of likely radar types will be yielded ().The ELINT receiver picks up the pulses emitted by surrounding radars in the environment and measures a sequence of PDWs, where a PDW is a data stream may be partitioned into two data streams called What and Where. Here the What data stream consists of parameters that characterize the functional aspects of radar systems. Such parameters include RF, PW, and PRI, which is directly useful for radar type identification. The data stream consists of context-specific parameters. This stream is defined by parameters, such as bearing (Brg) and PA, that indicate the status (e.g. position) of emitters in the environment and is less useful than what data steam for radar type identification. So in this paper, we choose the RF, PRI, and PW (What data stream) to compose a PDW.
Figure 2. ELINT System for intercepting pulses used in this paper.
The work presented in this paper is based on the SEI real data recorded by a research group (named ABC Group) located in Taiwan. The pulse repletion interval (PRI) is in the range of 1.0–10.0 μs, the PW is in the range of 0.1–10.0 μs, the RF of the carrier wave is in the range of 2.0–18.0 GHz. A sample of the radar pulse data-set is presented in .
Table 1. A sample radar pulse data-set for experiments.
The main difficulty is due to the capability limitations of ELINT sensors, which often fail to provide crisp value parameters and produce the range of parameter values for the emitters parameters, particularly emitters of complex characteristics. Interpretability and transparency of signal identification obtained with the FL-based approach are also worth emphasizing. It is expected that a T2 fuzzy classifier should explicitly define the rule that governs an effective radar emitter type classification. The details of the design method are described in following sections.
3. Type-2 fuzzy classifier design
3.1. Type-2 fuzzy set
Type-2 (T2) fuzzy sets were introduced first by Zadeh (Citation1975) as an extension of the concept of an ordinary type-1(T1) fuzzy set. The definitions for type-1 and type-2 fuzzy sets are given as follows:
A T1 fuzzy set A in a universe of discourse U is characterized by a membership function uA (x, u), which takes values between [0,1] and denoted by .
T2 fuzzy sets are high level representation of vague data and can handle the uncertainties in T1 fuzzy sets, such as the meaning of the word and noise measurements. T1 fuzzy sets are not able to directly model such uncertainties because their membership functions are totally crisp. On the other hand, type-2 fuzzy sets are able to model such uncertainties because their membership functions are themselves fuzzy.
A T2 fuzzy set, denoted Ã, is characterized by a T2 membership function, , where X is the universal set, x∈X and
. That is
Figure 3. Triangular T2 MF (base left/right endpoints) with uncertain interval-value. (a) Example of type-1 and type-2 MF. (b) T2 MF endpoints with uncertain interval-value.
3.2. Type-2 fuzzy classifier design
The emphasis is placed on type-2 fuzzy methodology due to its capabilities to account for noisy measurements or operate under random disturbances associated with ELINT recordings. T2 fuzzy sets have been chosen to represent antecedents of fuzzy rules. A template of a fuzzy rule in the Mamdani framework is as follows:
Assume the input vector is . The operation scheme of type-2 fuzzy classifier involves the following steps:
Compute the membership of xi on each
. [
Compute the firing interval of the nth rule,
Perform type-reduction to combine Fn(x) and the corresponding rule consequents. There are many such methods. The most commonly used one is the center-of-sets type-reducer:
It has been shown thatwhere the switch points L and R are determined byand(a) Sort
(b) Compute yl as
(c) Find
(d) Set
(e) Check if y′=y. If yes, stop and yl=y and L=k. If no, go to Step f.
(f) Set y=y′ and go to Step 3. The procedure for computing yr is very similar to the one for yl. Just replace yr by yl, and in Step 3 find
Compute the defuzzified output as
The operation scheme of designed type-2 fuzzy classifier has been shown in briefly.
Type-2 fuzzy classifier has been set up, with its FOU by taking intersections of all upper and lower memberships for all features by our heuristic method. If we choose the min operation as intersection, the FOU can be expressed as Choi and Rhee (Citation2009).
Figure 4. The operation scheme of design of type-2 fuzzy classifier using uncertainty UMF and LMF bounds technique.
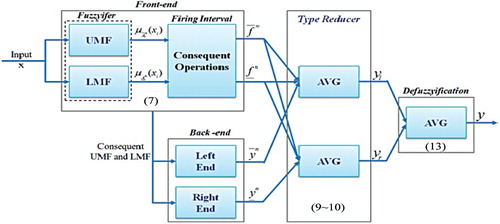
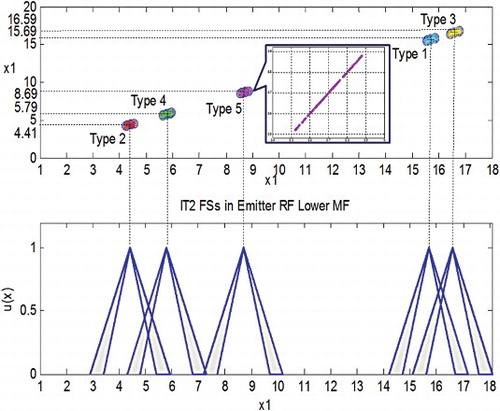
Figure 5. RF (lower limit) for the MFs.
4. Experimental results
In this section, the experiments are performed for the interval-valued input data to demonstrate the classification capability of the type-2 fuzzy classifier.
The ELINT repository used for this study contains three parameters: The PRI is in the range of 1.0–10.0 μs, the PW is in the range of 0.1–10.0 μs, and the RF of the carrier wave is in the range of 2.0–18.0 GHz.
There were five types radar emitters experiments carried out in this research reported here in order to examine the capabilities of the proposed type-2 fuzzy classifier. Its performance in terms of the error deviation level (EDL) was employed in this section. In this experiment, all data are consisted of 150 samples containing five emitter types from the emitter samples repository of ABC Group. To perform the testing at different levels of additive noise, the EDL was defined as
For the interval-value noisy samples, , briefly,
, where superscript L denoted lower and superscript U upper limits.
is the random noise corresponding to xpi, then the noisy testing sample will be
. shows an example of triangular type-2 fuzzy classifier MFs that are generated from the sample data-set of .
Figure 6. T2 fuzzy flassifier for antecedent MFs’ UMF/LMF.

In this experiment, jitter is normally described in terms of its probability density function on lower limit (L) and upper limit (U) edges. Wiley (Citation1982) states that the measurement jitter due to noise is white Gaussian, and then the corresponding interval is produced as
To perform the testing at different levels of introduction the jitter variation produces testing samples. In this experiment, the testing samples with different EDLs (from 0% to 20%) are presented to the type-2 fuzzy classifier for performance testing. The testing results, which also gained through 100 Monte Carlo simulations, are listed in .
Table 2. Average EDL performance of type-2 and type-1 fuzzy classifiers testing samples with jitter variation.
From , type-2 fuzzy classifier performs better than the type-1 counterpart; the former achieves an average EDL rate (from 0% to 20%) of 87.5% and the latter 67.4%. This explained type-2 fuzzy classifier advantage that effectively reduces the effects of uncertainties in radar emitter interval-value signals with and without jitter variations.
5. Conclusions
This paper distinguishes the differences between the type-2 and type-1 fuzzy classifiers, analyses the insensitive to jitter of the SEI classification problem. The type-2 fuzzy classifier has shown its superior capabilities to handle the uncertainty when compared with the classic type-1 fuzzy classifier. The robustness to noise is here of special importance. Monte Carlo simulation results show that the type-2 fuzzy classifier not only achieves better identification capability, but also obtains better adaptability to jitter. With the results achieved in this paper, the proposed type-2 fuzzy classifier may be embedded into ELINT system and enhance military applications (such as reconnaissance and threat reaction). In addition, as part of future work it is intended to explore the ways that uncertainty bounds of the classifier's output can be effectively exploited with a view of improving the performance of the classifier (Castillo & Melin, Citation2012; Melin et al., Citation2013). Only the central point of the output interval has been utilized so far.
REFERENCES
- Castillo, O., & Melin, P. (2012). Optimization of type-2 fuzzy systems based on bio-inspired methods: A concise review. Information Science, 205, 1–19.
- Chang, A., Kim, J. O., Ryu, K., & Kim, Y. (2008). Comparison of methods to estimate individual tree attributes using color aerial photographs and LiDAR data. WSEAS Transaction on Signal Process, 4(1), 21–27.
- Choi, B. I., & Rhee, C. H. (2009). Interval type-2 fuzzy membership function generation methods for pattern recognition. Information Sciences, 179, 2102–2122. doi: 10.1016/j.ins.2008.04.009
- Granger, E., Rubin, M., Grossberg, S., & Lavoie, P. (2001). A what-and-where fusion neural network for recognition and tracking of multiple radar emitters. Neural Networks, 14(3), 325–344. doi: 10.1016/S0893-6080(01)00019-3
- Hassan, S. A., Bhatti, A. I., & Latif, A. (2005, September). Emitter recognition using fuzzy inference system. IEEE international conference emerging technologies, Islamabad, p. p204–208.
- Karnik, N. N., & Mendel, J. M. (2001). Centroid of a type-2 fuzzy set. Information Sciences, 132, 195–220. doi: 10.1016/S0020-0255(01)00069-X
- Liu, J., Lee, J., Li, L., Luo, Z. Q., & Wong, K. (2005). Online clustering algorithms for radar emitter classification. IEEE Transaction on Pattern Analysis and Machine Intelligence, 27(8), 1185–1196. doi: 10.1109/TPAMI.2005.166
- Melin, P., & Castillo, O. (2013). A review on the applications of type-2 fuzzy logic in classification and pattern recognition. Expert System Applications, 40(13), 5413–5423. doi: 10.1016/j.eswa.2013.03.020
- Melin, P., Olivas, F., Castillo, O., Valdez, F., Soria, J., Mario García Valdez, J. (2013). Optimal design of fuzzy classification systems using PSO with dynamic parameter adaptation through fuzzy logic. Expert System. Applications, 40(8), 3196–3206. doi: 10.1016/j.eswa.2012.12.033
- Mendel, J. M., & Wu, H. (2007). New results about the centroid of an interval type-2 fuzzy set, including the centroid of a fuzzy granule. Information Sciences, 177, 360–377. doi: 10.1016/j.ins.2006.03.003
- Niewiadomski, A., & Bartyzel, M. (2006). Elements of type-2 semantics in summarizing databases. Lecture Notes in Artificial Intelligence, 4029, 278–287.
- Rabinovich, S. (2005). Measurement errors: Theory and practice. New York, NY: American Institute of Physics.
- Roe, J., Cussons, S., & Feltham, A. (1990). Knowledge-based signal processing for radar ESM systems. IEE Proceedings F, Radar and Signal Processing, 137(5), 293–301. doi: 10.1049/ip-f-2.1990.0045
- Rong, H., Jin, W., & Zhang, C. (2006). Application of support vector machines to pulse repetition interval modulation recognition. Proceedings of 6th international conference on ITS telecommunications, Chengdu, pp. 1187–1190.
- Ryoo, Y. J., Song, K. H., & Kim, W. W. (2007). Recognition of PRI modulation types of radar signals using the autocorrelation. IEICE Transaction Communication, E90-B(5), 290–1294.
- Thakur, S. J., Sing, K., Basu, D. K., & Nasipuri, M. (2008). Face recognition using principal component analysis and RBF neural networks. Proceedings of 1st international conference on emerging trends in engineering and technology, Nagpur, Maharashtra, pp. 695–700.
- Wiley, R. G. (1982). The analysis of radar signals (2nd ed.). Norwood, MA: Artech House.
- Wu, D., & Mendel, J. M. (2009). Enhanced Karnik-Mendel algorithms. IEEE Transaction on Fuzzy Systems, 17(4), 923–934. doi: 10.1109/TFUZZ.2008.924329
- Zadeh, L. A. (1975). The concept of a linguistic variable and its application to approximate reasoning. Information Sciences, 8, 199–249. doi: 10.1016/0020-0255(75)90036-5