
ABSTRACT
In this paper, we address the problem of robust sliding mode control (SMC) for a class of discrete-time stochastic systems with parameter uncertainties, time-varying delay and randomly varying nonlinearities (RVNs) under uncertain occurrence probability. Here, the norm-bounded parameter uncertainties are considered. The time-varying delay is bounded with known upper and lower bounds. In addition, the RVNs are depicted by using a Bernoulli distributed stochastic variable with uncertain occurrence probability. The aim of the paper is to provide an SMC method such that, for all parameter uncertainties, time-varying delay and RVNs, the robust asymptotic stability with a prescribed disturbance attenuation level is guaranteed for the sliding mode dynamics by providing a new sufficient condition. Moreover, the reachability analysis is carried out simultaneously, i.e. the states of the closed-loop system are driven onto a neighborhood of pre-designed sliding surface by synthesizing a robust sliding mode controller. Finally, the usefulness of the aforementioned control technique is verified by a numerical example.
1. Introduction
Over the past decades, as a useful robust control method, the sliding mode control (SMC) has been extensively investigated and applied in engineering systems because of its attractive invariant properties (Choi, Citation2007; Davila, Fridman, & Levant, Citation2005; Foo & Rahman, Citation2010; Gao & Hung, Citation1993; Grema & Cao, Citation2017; Lee, Kim, & Sastry, Citation2009; Li, Yu, Hilton, & Liu, Citation2013), such as the insensitiveness to time-varying parameter perturbations and disturbances on prescribed sliding surface. According to the structural characteristic between various systems, a great number of methods have been proposed to copy with the robust control problems via SMC method, see e.g. Choi (Citation2010), Hu, Wang, Niu, & Gao (Citation2014), Gao, Wang, & Homaifa (Citation1995) and Niu, Ho, & Lam (Citation2005). Note that the digital control algorithms have commonly been used in the modern industrial fields, hence it has been prevalent for the SMC design of discrete control systems (Gao et al., Citation1995; Hu et al., Citation2014). For example, the robust SMC scheme has been given in Hu et al. (Citation2014) for discrete-time nonlinear Markovian jump systems (MJSs). In Gao et al. (Citation1995), the quasi-sliding mode has been discussed and the problems of the analysis and its engineering application have been extensively considered for discrete-time systems (Ma, Wang, Bo, & Guo, Citation2012).
As it is well known, the time-delays are often encountered in many physical systems during the signal transmissions, the signal judgment and computations (Bahreini & Zarei, Citation2016; Gholami & Binazadeh, Citation2018; Hu et al., Citation2014; Liu, Liu, Obaid, & Abbas, Citation2016; Yuan, Yuan, Wang, Guo, & Yang, Citation2017). The existence of the time-delays indeed leads to deteriorate the control system performance (Ding, Wang, Shen, & Dong, Citation2015; Hu, Wang, Gao, & Stergioulas, Citation2012a; Li, Dong, Han, Hou, & Li, Citation2017; Li, Shen, Liu, & Alsaadi, Citation2016; Niu & Ho, Citation2006). Hence, much effort has been devoted to eliminating the negative effects of time-delays onto whole system performance and a great number of SMC techniques have been developed for delayed systems with different types of time-delays, see e.g. Qi, Park, Cheng, & Kao (Citation2017), Jiang, Kao, & Gao (Citation2017), Hu, Wang, Gao, & Stergioulas (Citation2012b) and Wu, Su, & Shi (Citation2012). To be specific, the problem of robust stabilization has been tackled in Qi et al. (Citation2017) for semi-MJSs with time-varying delays via SMC method. In Jiang et al. (Citation2017), the integrator-based robust SMC method has been proposed for stochastic MJSs with slow time-varying delays. Recently, based on the delay-fractioning approach, a unified SMC framework has been established in Hu et al. (Citation2012b) for discrete uncertain stochastic systems with mixed time-delays (discrete time-varying delays and distributed delays) and randomly occurring nonlinearities (RONs) satisfying the section-bounded conditions.
On the other hand, it is well known that additive nonlinearities and disturbances, if not properly addressed, may degrade the whole performance of the dynamical system (Hu, Liu, Ji, & Li, Citation2016; Hu, Wang, & Gao, Citation2011; Wang, Ding, Dong, & Shu, Citation2013; Wang, Wang, & Liu, Citation2010; Wang, Yaz, Schneider, & Yaz, Citation2017; Zou, Wang, Han, & Zhou, Citation2017). As such, a large number of control methods have been developed to tackle the SMC problem for systems with nonlinearities and disturbances, see e.g. Hu et al. (Citation2011), Wang, Chan, Hsu, & Lee (Citation2002) and Zhang, Su, & Lu (Citation2015). The so-called RONs have first been introduced in Wang et al. (Citation2010) to model the stochastic disturbances in networked environment. Subsequently, the robust SMC approach has been developed in Hu et al. (Citation2011) for a class of stochastic systems with RONs via the delay-fractioning approach, where sufficient condition has been given to ensure the stability of sliding motion and proper SMC law has been synthesized. It is worth pointing out that the randomly varying nonlinearities (RVNs) have gained certain research interest especially in networked environment (Ding et al., Citation2015; Li et al., Citation2017). In particular, due to the inaccuracy of the statistical tests or other reasons, there is a need to model the RVNs with uncertain occurrence probability in a mathematical way (Zhang, Hu, Zhang, & Chen, Citation2017). Recently, the robust SMC method has been given in Zhang et al. (Citation2017) for discrete systems with RVNs and time-varying delay. However, the robust SMC problem has not been addressed for discrete delayed stochastic systems with RVNs under uncertain occurrence probability, which motivates the current investigation with hope to further extend the existing result in Zhang et al. (Citation2017).
Motivated by the above discussions, in this paper, we aim to solve the robust SMC problem for a class of discrete systems with parameter uncertainties, time-varying delay and RVNs under uncertain occurrence probability. A linear sliding surface is firstly defined. Then, sufficient conditions are established such that the system dynamics in the specified sliding surface is robustly asymptotically stable with a given
performance, where the desired performance requirements can be realized by checking the feasibility of some LMIs and an equality constraint. Subsequently, a computational algorithm is presented to convert the original non-convex problem to an optimization one. The contributions of this paper can be listed as follows: (i) the systems addressed are more comprehensive, where the parameter uncertainties, time-varying delay as well as RVNs are considered in a same framework; (ii) the problem of
SMC is discussed for addressed systems with RVNs under uncertain occurrence probability for the first time; and (iii) a new
SMC scheme is provided to check the effects from the parameter uncertainties, time-varying delay, and RVNs under uncertain occurrence probability onto whole system performance. Finally, simulations are used to illustrate the usefulness of the proposed robust SMC scheme.
2. Problem formulation and preliminaries
Consider the following discrete uncertain system with time-varying delay and RVNs:
(1) where
is state of the system,
is the control input,
represents the controlled output,
is the time-varying delay where
and
are known upper and lower bounds.
denotes the matched nonlinearity. A,
, B, C,
,
,
, and
are known matrices.
is the exogenous disturbance.
The matrices and
represent the mismatched norm-bounded uncertainties satisfying:
(2) where
,
are known matrices, and
are unknown matrices with
. The
are nonlinear functions satisfying the following sector-bounded conditions:
(3) where matrices
and
are known matrices with proper dimensions and
.
is a 0-1 distributed stochastic variable with
(4) where
,
is a known scalar,
satisfies
with ε being a certain constant and
. Then, we have
(5)
Remark 2.1
In (Equation4(4) ), the stochastic variable
obeying the Bernoulli distribution is introduced to characterize the so-called RVNs satisfying the sector-bounded conditions (Equation3
(3) ). Here,
is utilized to characterize the uncertain occurrence probability, and the exact probability of
may not easily be obtained probably due to the inaccuracy of the statistical tests or other reasons. Such a description can better reflect the case when the system is influenced by unpredictable factors, which would frequently happen in a probabilistic way. In fact, the introduction of
could provide an extension of the description of RVNs within stochastic settings and the traditional modelling way of RVNs can be easily obtained by simply setting
.
To proceed, we introduce the following assumptions.
Assumption 2.1
The nonlinear function is Euclidean norm-bounded.
Assumption 2.2
The matrix B is assumed to be full column rank.
The purpose of the paper is to propose a novel robust SMC law such that, for the simultaneous presence of norm-bounded uncertainties, time-varying delay, and RVNs under uncertain occurrence probability, both (Q1) and (Q2) can be satisfied, where
the state trajectories of system (Equation1
(1) ) are driven onto the designed sliding surface in finite time and, subsequently, the sliding motion is robustly asymptotically stable in mean square sense;
when
Generally, we aim to design an SMC law by taking two steps: (i) design a discrete sliding surface and propose sufficient conditions to guarantee the robust asymptotic stability in mean square sense of the corresponding sliding mode dynamics with a prescribed performance; and (ii) synthesize the control law to guarantee the reachability of the sliding surface and restrict the system trajectories within a specified neighborhood of defined sliding surface thereafter.
Before ending this section, we give the following lemmas to facilitate further theoretical developments.
Lemma 2.1
For any real vectors a, b and matrix P>0 of appropriate dimensions, we have
(7)
Lemma 2.2
Schur complement
Given constant matrices
where
and
then
if and only if
(8)
Lemma 2.3
Let M and N be real matrices of compatible dimensions. Then
for all F satisfying
if and only if there exists a constant
such that
or, equivalently,
(9)
3. Main results
In this section, we aim to deal with the design problem of robust sliding mode controller for addressed delayed systems in presence of parameter uncertainties, RVNs and external disturbances. A switching surface is firstly presented. Then, the robust asymptotic stability in mean square sense of the corresponding sliding mode dynamics with a pre-defined
performance is ensured by providing a sufficient condition in terms of an LMI with an equality constraint. Subsequently, a computational algorithm is provided with help to convert the original non-convex problem into a minimization problem. In addition, a discrete sliding mode controller is presented to guarantee the reachability condition.
3.1. Switching surface
Similar to Hu et al. (Citation2012a), we define the following linear switching function:
(10) where constant matrix
is designed later such that GB is non-singular and
, here
. In what follows, we select
with P>0 to ensure the non-singularity of GB.
Note that the ideal quasi-sliding mode satisfies
(11) Then, the equivalent control law can be derived from (Equation1
(1) ), (Equation10
(10) ) and (Equation11
(11) ) as follows:
(12) Substituting (Equation12
(12) ) as
into (Equation1
(1) ), the sliding mode dynamics equation is obtained as
(13)
Now, we are ready to propose the robust asymptotic stability condition in mean square sense for the resulted closed-loop system (Equation13(13) ) via the Lyapunov stability theorem.
Theorem 3.1
The sliding mode dynamics (Equation13(13) ) with
is robustly asymptotically stable in mean square sense if there exist matrices
Q>0 and scalar
satisfying
(14)
(15) where
Proof.
Choose the following Lyapunov-Krasovskii functional:
(16)
where
with P>0 and Q>0 being matrices to be determined. Then, the difference of
along the system trajectory (Equation13
(13) ) can be expressed as
(17) where
(18) with
. By applying Lemma 2.1, it follows that
(19)
(20)
(21)
(22)
(23) Hence, substituting (Equation19
(19) )–(Equation23
(23) ) into (Equation18
(18) ) yields
(24) Similarly, it can be inferred that
(25)
(26) Thus, it follows from (Equation24
(24) )–(Equation26
(26) ) that
(27) where
(28) Considering (Equation3
(3) ), we have
(29) Then, it is not difficult to obtain
(30) where
(31) Subsequently, noting
and employing Lemma 2.2,
is equivalent to
(32) where
where
are defined in (Equation28
(28) ),
and
are defined in (Equation31
(31) ).
Furthermore, rewrite matrix by
(33) where
By using Lemmas 2.2 and 2.3, it is obtained that matrix
can guarantee matrix
. Further, we imply
, then
. Therefore, it can be concluded that the sliding mode dynamics (Equation13
(13) ) is robustly asymptotically stable in mean square sense. Then, the proof of Theorem 3.1 is complete.
Subsequently, a unified framework is presented to ensure the robust mean-square asymptotic stability of the sliding mode dynamics (Equation13(13) ) with a prescribed
performance.
Theorem 3.2
For a pre-specified scalar the sliding mode dynamics (Equation13
(13) ) is robustly mean-square asymptotically stable with disturbance attenuation level γ if there exist matrices
Q>0 and scalar
satisfying
(34)
(35) where
Proof.
Clearly, implies
. According to Theorem 3.1, the robust mean-square asymptotic stability of the sliding mode dynamics is achieved.
Next, let us handle the performance of the dynamics under consideration. Choose the same Lyapunov-Krasovskii functional as in Theorem 3.1. Then, the following inequality is derived by a similar difference calculation,
(36) where
(37)
,
and
are defined below (Equation35
(35) ).
To copy with the performance analysis of the sliding mode dynamics (Equation13
(13) ), the following index is introduced:
(38) Obviously, we aim to demonstrate
when
. It is easy to see that
(39) where
is defined in (Equation28
(28) ). From Lemmas 2.2 and 2.3, it is derived from (Equation34
(34) ) that
and
. Letting
, we have
(40) which completes the proof of Theorem 3.2.
Remark 3.1
In Theorem 3.2, a sufficient condition is given to ensure the robust mean-square asymptotic stability of the sliding mode dynamics with a prescribed performance. However, it is worth mentioning that there exists an equality constraint (Equation35
(35) ) and it is not easy to check the feasibility of the proposed method. Via the subsequent algorithm, a minimization problem is provided to verify the desired performance requirements.
3.2. Computational algorithm
It should be noted that the result in Theorem 3.2 is non-convex because of the equality constraint in (Equation35
(35) ). According to the method as in Niu et al. (Citation2005); Niu, Ho, & Wang (Citation2007), the equality
can be equivalently described by
. We now present the following inequality
with
. By utilizing the Schur complement, it follows that
(41) Then, the original
SMC problem is changed to following equivalent minimization problem:
(42)
3.3. Design of sliding mode controller
In this subsection, based on the reaching condition in Gao et al. (Citation1995), we are ready to synthesize an SMC law and conduct the reachability analysis of the specified sliding surface.
As in Gao et al. (Citation1995), the desired performance can be achieved if the following reaching condition holds,
(43) where, κ is the sampling period,
and
, here
and
are properly chosen scalars satisfying
.
Recall that and
in (Equation2
(2) ) and
in Assumption 2.1 are bounded in terms of Euclidean norm. As in Hu et al. (Citation2012b), set
,
and
. Then
,
, and
are also bounded. Naturally, we suppose that there exist known bounds
,
,
,
and
satisfying
(44) where
,
and
are the ith element in
,
and
, respectively. Define
(45) Next, we are in a position to synthesize the discrete-time robust sliding mode controller and then ensure the reachability.
Theorem 3.3
Suppose that the problem (Equation42(42) ) is solvable. If the sliding surface is presented by (Equation10
(10) ) with
and P is the solution to (Equation42
(42) ), then the following sliding mode controller
(46) can ensure the discrete reaching condition of specified sliding surface (Equation10
(10) ).
Proof.
The proof of this theorem is omitted for simplicity.
Remark 3.2
In this paper, the robust SMC problem has been studied for discrete stochastic systems with parameter uncertainties, time-varying delay and RVNs under uncertain occurrence probability. Up to know, new sufficient condition has been given to ensure the stability analysis of the sliding mode dynamics and the sliding mode controller has been designed, i.e. (Q1) and (Q2) have been satisfied, which ensure the desired performance requirements. Compared with published results, we need to deal with the difficulties from the parameter uncertainties, time-varying delay and RVNs simultaneously. Hence, we make efforts to attenuate the effects from mentioned factors onto whole system performance and propose an easy-to-verify sufficient criterion via the stochastic analysis technique. In particular, the related information of the mentioned factors is clearly reflected in Theorem 3.2, e.g. the matrices
,
and scalars
, ε are there for RVNs subject to uncertain occurrence probability, the scalars
and
reflect the time-varying delay, and the matrices
,
,
and
account for the parameter uncertainties.
4. An illustrative example
In this section, we give an example to verify the effectiveness of the obtained method. Consider system (Equation1(1) ) with the following parameters:
In the simulation, set
where
and
are the ith element of
. Let
,
,
,
,
, and
Then, the solution to the minimization problem (Equation42
(42) ) can be expressed as
Selecting and
, then all parameters in the sliding mode controller (Equation46
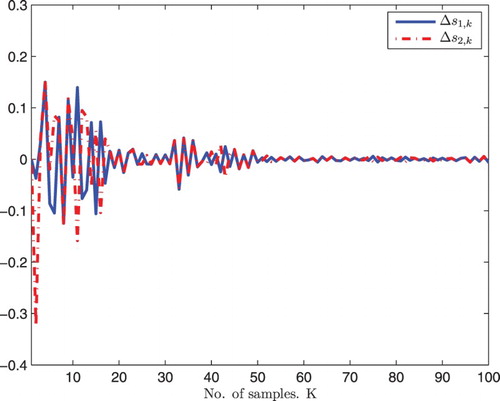
(46) ) are obtained. Then, the simulation results can be given in Figures –. Among them, Figure shows the state responses of the system where
,
and
converge to a small neighborhood of zero quickly. The control input
is plotted in Figure and the time-delay
is plotted in Figure . Besides, the sliding mode function
and signal
are respectively presented in Figures and . From the simulations, we can see that the control scheme obtained performs well.
Figure 1. The trajectory of state .
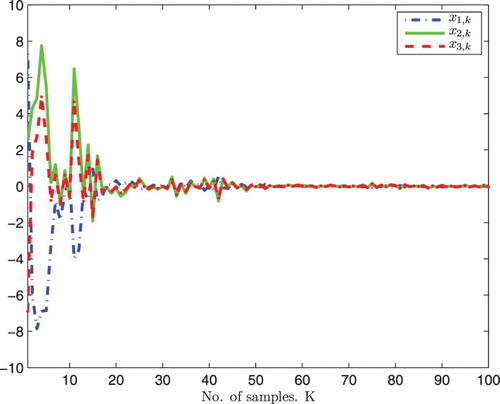
Figure 2. The trajectory of sliding variable .
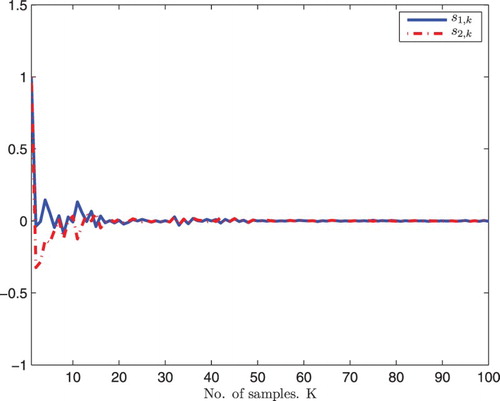
Figure 3. The control signal .
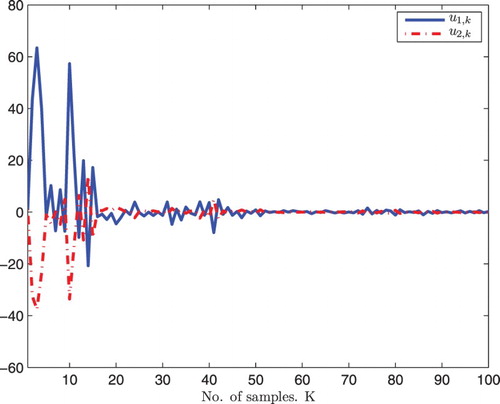
Figure 4. The time-varying delay .
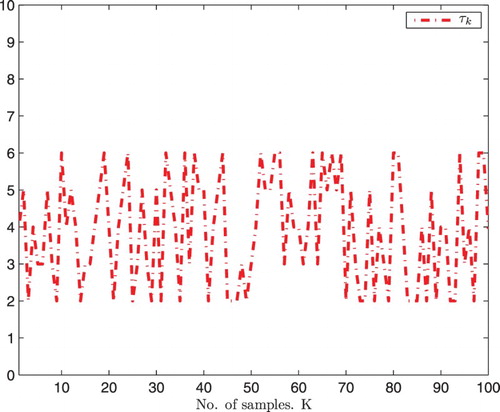
Figure 5. The signal .
5. Conclusions
In this paper, the robust SMC problem has been discussed for uncertain delayed systems with RVNs under uncertain occurrence probability. The phenomenon of RVNs has been modeled by a Bernoulli distributed stochastic variable with uncertain occurrence probability. Firstly, a linear sliding surface has been constructed. Secondly, sufficient conditions have been established to ensure robust mean-square asymptotic stability of the sliding mode dynamics with a prescribed
performance. Subsequently, a minimization algorithm has been proposed for convenience of checking the feasibility of the proposed scheme and an SMC law has been constructed to ensure the reachability condition. It should be mentioned that the parameter matrices in the sliding surface and the synthesized SMC law can be obtained by solving an optimal problem. Finally, a numerical example has been given to demonstrate the feasibility of the obtained
SMC scheme. It is worthwhile to point out that it is of significant importance to analyze and design the dynamical systems when the information is transmitted by limited network resources. Hence, further research topics include the extensions to the robust SMC problem for systems with communication protocols as in Zou, Wang, Gao, & Alsaadi (Citation2017) and Zou, Wang, Hu, & Gao (Citation2017), the event-triggered scheme in Dong, Wang, Shen, & Ding (Citation2016) and the incomplete measurements in Geng, Liang, Liu, & Alsaadi (Citation2018), Geng, Liang, Yang, Xu, & Pan (Citation2017) and Geng, Wang, Cheng, & Alsaadi (Citation2017) to improve the utilization of network resources.
Disclosure statement
No potential conflict of interest was reported by the authors.
ORCID
Additional information
Funding
References
- Bahreini, M., & Zarei, J. (2016). Static-output feedback controller design for a class of nonlinear networked control systems with random delay and data packet dropout. Systems Science & Control Engineering, 4(1), 192–198.
- Choi, H. H. (2007). LMI-based sliding surface design for integral sliding mode control of mismatched uncertain systems. IEEE Transactions on Automatic Control, 52(4), 736–742.
- Choi, H. H. (2010). Robust stabilization of uncertain fuzzy-time-delay systems using sliding-mode-control approach. IEEE Transactions on Fuzzy Systems, 18(5), 979–984.
- Davila, J., Fridman, L., & Levant, A. (2005). Second-order sliding-mode observer for mechanical systems. IEEE Transactions on Automatic Control, 50(11), 1785–1789.
- Ding, D., Wang, Z., Shen, B., & Dong, H. (2015). H∞ state estimation with fading measurements, randomly varying nonlinearities and probabilistic distributed delays. International Journal of Robust and Nonlinear Control, 25(13), 2180–2195.
- Dong, H., Wang, Z., Shen, B., & Ding, D. (2016). Variance-constrained H∞ control for a class of nonlinear stochastic discrete time-varying systems: The event-triggered design. Automatica, 72, 28–36.
- Foo, G., & Rahman, M. F. (2010). Sensorless sliding-mode MTPA control of an IPM synchronous motor drive using a sliding-mode observer and HF signal injection. IEEE Transactions on Industrial Electronics, 57(4), 1270–1278.
- Gao, W., & Hung, J. C. (1993). Variable structure control of nonlinear systems: A new approach. IEEE Transactions on Industrial Electronics, 40(1), 45–55.
- Gao, W., Wang, Y., & Homaifa, A. (1995). Discrete-time variable structure control systems. IEEE Transactions on Industrial Electronics, 42(2), 117–122.
- Geng, H., Liang, Y., Liu, Y., & Alsaadi, F. E. (2018). Bias estimation for asynchronous multi-rate multi-sensor fusion with unknown inputs. Information Fusion, 39, 139–153.
- Geng, H., Liang, Y., Yang, F., Xu, L., & Pan, Q. (2017). Model-reduced fault detection for multi-rate sensor fusion with unknown inputs. Information Fusion, 33, 1–14.
- Geng, H., Wang, Z., Cheng, Y., & Alsaadi, F. E. (2017). Tobit Kalman filter with time-correlated multiplicative sensor noises under redundant channel transmission. IEEE Sensors Journal, 17(24), 8367–8377.
- Gholami, H., & Binazadeh, T. (2018). Design finite-time output feedback controller for nonlinear discrete-time systems with time-delay and exogenous disturbances. Systems Science & Control Engineering, 6(1), 20–27.
- Grema, A. S., & Cao, Y. (2017). Receding horizon control for oil reservoir waterflooding process. Systems Science
- Hu, J., Liu, S., Ji, D., & Li, S. (2016). On co-design of filter and fault estimator against randomly occurring nonlinearities and randomly occurring deception attacks. International Journal of General Systems, 45(5), 619–632.
- Hu, J., Wang, Z., & Gao, H. (2011). A delay fractioning approach to robust sliding mode control for discrete-time stochastic systems with randomly occurring non-linearities. IMA Journal of Mathematical Control and Information, 28(3), 345–363.
- Hu, J., Wang, Z., Gao, H., & Stergioulas, L. K. (2012a). Robust H∞ sliding mode control for discrete time-delay systems with stochastic nonlinearities. Journal of the Franklin Institute, 349(4), 1459–1479.
- Hu, J., Wang, Z., Gao, H., & Stergioulas, L. K. (2012b). Robust sliding mode control for discrete stochastic systems with mixed time delays, randomly occurring uncertainties, and randomly occurring nonlinearities. IEEE Transactions on Industrial Electronics, 59(7), 3008–3015.
- Hu, J., Wang, Z., Niu, Y., & Gao, H. (2014). Sliding mode control for uncertain discrete-time systems with Markovian jumping parameters and mixed delays. Journal of the Franklin Institute, 351(4), 2185–2202.
- Jiang, B., Kao, Y., & Gao, C. (2017). Integrator-based robust H∞ sliding mode control of uncertain stochastic Markovian jump delay systems with non-linear perturbations. IET Control Theory & Applications, 11(8), 1124–1133.
- Lee, D., Kim, H. J., & Sastry, S. (2009). Feedback linearization vs. adaptive sliding mode control for a quadrotor helicopter. International Journal of Control, Automation and Systems, 7(3), 419–428.
- Li, J., Dong, H., Han, F., Hou, N., & Li, X. (2017). Filter design, fault estimation and reliable control for networked time-varying systems: A survey. Systems Science & Control Engineering, 5(1), 331–341.
- Li, Q., Shen, B., Liu, Y., & Alsaadi, F. E. (2016). Event-triggered H∞ state estimation for discrete-time stochastic genetic regulatory networks with Markovian jumping parameters and time-varying delays. Neurocomputing, 174, 912–920.
- Li, H., Yu, J., Hilton, C., & Liu, H. (2013). Adaptive sliding-mode control for nonlinear active suspension vehicle systems using T-S fuzzy approach. IEEE Transactions on Industrial Electronics, 60(8), 3328–3338.
- Liu, Y., Liu, W., Obaid, M. A., & Abbas, I. A. (2016). Exponential stability of Markovian jumping Cohen-Grossberg neural networks with mixed mode-dependent time-delays. Neurocomputing, 177, 409–415.
- Ma, L., Wang, Z., Bo, Y., & Guo, Z. (2012). Robust H∞ sliding mode control for nonlinear stochastic systems with multiple data packet losses. International Journal of Robust and Nonlinear Control, 22(5), 473–491.
- Niu, Y., Ho, D. W. C., & Lam, J. (2005). Robust integral sliding mode control for uncertain stochastic systems with time-varying delay. Automatica, 41(5), 873–880.
- Niu, Y., Ho, D. W. C., & Wang, X. (2007). Sliding mode control for Itô stochastic systems with Markovian switching. Automatica, 43(10), 1784–1790.
- Niu, Y., & Ho, D. W. C. (2006). Robust observer design for Itô stochastic time-delay systems via sliding mode control. Systems & Control Letters, 55(10), 781–793.
- Qi, W., Park, J. H., Cheng, J., & Kao, Y. (2017). Robust stabilisation for non-linear time-delay semi-Markovian jump systems via sliding mode control. IET Control Theory & Applications, 11(10), 1504–1513.
- Wang, W., Chan, M., Hsu, C., & Lee, T. (2002). H∞ tracking-based sliding mode control for uncertain nonlinear systems via an adaptive fuzzy-neural approach. IEEE Transactions on Systems, Man, and Cybernetics-Part B: Cybernetics, 32(4), 483–492.
- Wang, Z., Ding, D., Dong, H., & Shu, H. (2013). H∞ consensus control for multi-agent systems with missing measurements: The finite-horizon case. Systems & Control Letters, 62(10), 827–836.
- Wang, Z., Wang, Y., & Liu, Y. (2010). Global synchronization for discrete-time stochastic complex networks with randomly occurred nonlinearities and mixed time delays. IEEE Transactions on Neural Networks, 21(1), 11–25.
- Wang, X., Yaz, E. E., Schneider, S. C., & Yaz, Y. I. (2017). H2;−H∞ control of discrete-time nonlinear systems using the state-dependent Riccati equation approach. Systems Science & Control Engineering, 5(1), 215–223.
- Wu, L., Su, X., & Shi, P. (2012). Sliding mode control with bounded gain performance of Markovian jump singular time-delay systems. Automatica, 48(8), 1929–1933.
- Yuan, Y., Yuan, H., Wang, Z., Guo, L., & Yang, H. (2017). Optimal control for networked control systems with disturbances: A delta operator approach. IET Control Theory & Applications, 11(9), 1325–1332.
- Zhang, P., Hu, J., Zhang, H., & Chen, D. (2017). Robust sliding mode control for discrete delayed systems with randomly varying nonlinearities under uncertain occurring probability. The 2017 Chinese Automation Congress 2017 China Intelligent Manufacturing International Conference, Jinan, China, October 20–22 (pp. 4832–4837).
- Zhang, X., Su, H., & Lu, R. (2015). Second-order integral sliding mode control for uncertain systems with control input time delay based on singular perturbation approach. IEEE Transactions on Automatic Control, 60(11), 3095–3100.
- Zou, L., Wang, Z., Gao, H., & Alsaadi, F. E. (2017). Finite-horizon H∞ consensus control of time-varying multi-agent systems with stochastic communication protocol. IEEE Transactions on Cybernetics, 47(8), 1830–1840.
- Zou, L., Wang, Z., Han, Q., & Zhou, D. (2017). Ultimate boundedness control for networked systems with Try-Once-Discard protocol and uniform quantization effects. IEEE Transactions on Automatic Control, 62(12), 6582–6588.
- Zou, L., Wang, Z., Hu, J., & Gao, H. (2017). On H∞ finite-horizon filtering under stochastic protocol: Dealing with high-rate communication networks. IEEE Transactions on Automatic Control, 62(9), 4884–4890.