
 ?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.
?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.Abstract
In recent years, issues on global warming and climate change have received public attention. One of the causes of this problem is carbon emissions in the transportation sector. Therefore, a proper route can reduce this problem. This article aims to develop the Hybrid Whale Optimization Algorithm (HWOA) to minimize the distribution cost of the Green Vehicle Routing Problem (GVRP). The proposed algorithm is based on the Whale Optimization Algorithm (WOA) algorithm combined with the Tabu search algorithm and local search procedures. In the proposed HWOA algorithm, 10% of the whale search agents were adjusted according to the Tabu Search heuristic procedure. A local search was applied to improve the algorithm's quality. Furthermore, a numerical experiment is carried out to test the proposed algorithm. The experiments are conducted to determine the effect of parameters and various speeds on total distribution cost and computation time. Moreover, The proposed algorithm is also compared to some previous algorithms. The findings showed that HWOA is more competitive in minimizing the total distribution cost of GVRP as compared to other algorithms.
KEYWORDS:
1. Introduction
In recent years, global warming and climate change have raised attention (Eguia et al., Citation2013). The mitigation of climate change was discussed at the global climate summit in Copenhagen in 2009 (Zhang et al., Citation2015). The industrial sector contributes the most significant contribution to global warming (Bruglieri et al., Citation2019; Utama, Citation2019) because the distribution process uses fossil-fueled vehicles (Shuai et al., Citation2019). More than 40% of total company costs are used for transportation fuel consumption in China, and 30% of the total carbon emissions are caused by carbon emissions in goods transportation (Li & Zhang, Citation2014). Therefore, the transportation sector is one of the significant triggers of global warming and climate change (Ibrahim et al., Citation2020; Stellingwerf et al., Citation2018). Fossil-fueled vehicles produce CO2 gas, which influences climate change (Schröder & Cabral, Citation2019) because carbon emissions are produced by burning fossil fuel vehicles (Poonthalir & Nadarajan, Citation2018). Therefore, the routing problem by considering the environmental aspect is classified in the Green Vehicle Routing Problem (GVRP). It is a development of the Vehicle Routing Problem (VRP). Erdoğan and Miller-Hooks (Citation2012) are the first researchers to propose GVRP. In the classic VRP, the objective functions are to minimize total costs (Utama et al., Citation2020a) and travel distance (Dantzig & Ramser, Citation1959; Garside et al., Citation2016; Masudin et al., Citation2019). Meanwhile, GVRP functions to minimize the environmental impacts caused by the distribution process. Therefore, with the right GVRP, a company can effectively reduce its carbon emissions and fossil fuel consumption (Sbihi & Eglese, Citation2007).
As an NP-Hard problem, the solution of GVRP is difficult to find at the time of polynomials (Baldacci et al., Citation2004; Oesterle & Bauernhansl, Citation2016). Consequently, experts develop heuristic and metaheuristic algorithms to solve this problem. Several metaheuristics algorithms have been studied in GVRP to minimize fuel consumption, such as Simulated Annealing (SA) (Eydi & Alavi, Citation2018; Felipe et al., Citation2014; Karagul et al., Citation2019; Koç & Karaoglan, Citation2016; Kuo, Citation2010; Normasari et al., Citation2019; Yasin & Vincent, Citation2013), Ant Colony Optimization (ACO) (Jabir et al., Citation2017; Zhang et al., Citation2019), and Revised Hybrid Intelligent Algorithm (Wang et al., Citation2018). Particle Swarm Optimization (PSO) (Norouzi et al., Citation2017; Poonthalir & Nadarajan, Citation2018), Tabu Search (TS) (Kuo & Wang, Citation2011), and Genetic Algorithms (GA) (Franco et al., Citation2017) were also proposed to solve it. Meanwhile, in terms of minimizing carbon emissions, several researchers proposed procedures for solving the GVRP problem. The proposed algorithms included the GA (de Oliveira da Costa et al., Citation2018), TS (Jabali et al., Citation2012; Kirci, Citation2016; Udin et al., Citation2017), Hybrid of MIP, and Iterated Neighborhood algorithm (Xiao & Konak, Citation2016), and SA (Abdoli et al., Citation2017; Cinar et al., Citation2015; Xiao & Konak, Citation2015). A different approach was also recommended by Afshar-Bakeshloo et al. (Citation2016) using Mixed Integer Linear Programming (MILP). Xiao and Konak (Citation2017) proposed a GA with the exact dynamic programming procedure to reduce emissions and fuel consumption. Moreover, Poonthalir and Nadarajan (Citation2018) and Zhang et al. (Citation2015) studied GVRP to minimize total distribution costs include fuel consumption and carbon emissions. They proposed the use of the TS algorithm.
Some previous studies have suggested several procedures for solving GVRP. However, the Hybrid Whale Optimization (HWOA) algorithm has never been investigated to solve the GVRP problem. Therefore, this research proposes HWOA, which combines the Whale Optimization Algorithm (WOA) algorithm, TS algorithm, and local search to solve this problem. Motive and challenges for researchers to apply HWOA in overcoming GVRP problems such as 1). The WOA is a new algorithm that mimics humpback whales’ behaviour in hunting for prey (Mirjalili & Lewis, Citation2016). 2). Several previous studies have shown that WOA has been effectively used in solving problems such as Inventory (Khalilpourazari et al., Citation2019), scheduling (Abdel-Basset et al., Citation2018; Utama et al., Citation2020c), Prediction (Osama et al., Citation2017), and Allocation (Yan et al., Citation2018). 3). As an NP-Hard problem, GVRP requires effective procedures to solve this problem. This research proposed that 10% of the search agents in the WOA is replaced based on the TS. TS is chosen because it is a popular heuristic procedure in GVRP. It has been successfully integrated with the Neighborhood Search Algorithm (Niu et al., Citation2018), SA (Ene et al., Citation2016), PSO (Shen et al., Citation2018), and MILP (Kwon et al., Citation2013). 4). This research offers a Local search procedure to improve algorithm performance. It is a popular procedure to improve performance algorithm to solve the NP-Hard problem (Pop et al., Citation2013; Stodola, Citation2020; Utama et al., Citation2020c).
Moreover, to the best of our knowledge, there have been very few studies discussing employing GVRP to minimize total distribution costs that incorporate fuel consumption, carbon emissions, and vehicle usage cost. This study proposes the HWOA algorithm to minimize the distribution cost that considers the fuel consumption, carbon emission, and vehicle-usage cost in GVRP. HWOA algorithm is tested with several experiments to find the best parameters. The proposed algorithm is also compared to some state-of-the-art algorithms. Thus, this study is expected to contribute to the research on GVRP by introducing a new GVRP algorithm.
The overall structure of the study as follows: section 2 presents assumptions and problem definition, section 3 presents a proposed algorithm, section 4 presents data collection and experimental procedures, section 5 presents results and discussion, and in the final section presents a conclusion and suggestion.
2. Assumptions and problem definitions
In section 2, the authors present assumptions of the problem, notations, and mathematical model in the GVRP problem explained in the next subsection.
2.1. Assumptions
In this section, assumptions used in the GVRP problem include (1) the trip route starts and ends at the distribution centre, (2) the vehicle has a fixed load capacity in every trip, (3) the vehicle loads affect fuel cost, carbon emissions, and vehicle use (4) the increase in fuel consumption (p) for each additional load M is fixed, (5) Each customer's service time is the same and fixed, (6) there are three types of vehicle speed.
2.2. Notations and problem definition
As mentioned in section 1, the problem of GVRP aims to minimize the distribution cost that considers the fuel consumption, carbon emission, and vehicle-usage cost in GVRP. This problem based on research examined by Zhang et al. (Citation2015), and the notations used are as follows:
Table
Equation (1) shows that the objective function of the problem is to minimize total distribution costs that included fuel consumption, carbon emission, and vehicle-use cost. Constraints (2) and (3) are formulas to ensure that the total load does not exceed the vehicle's capacity. Constraint (4) describes that the first and last node of each vehicle route is Distribution Center. Constraint (5) confirms that the defined variables are well outlined.
3. Proposed HWOA algorithm
This study proposes HWOA that develops from combining the Whale Optimization Algorithm (WOA) algorithm, TS algorithm, and local search. WOA is an optimization algorithm that is inspired by whales’ behaviour in locating their prey. This algorithm was first suggested by Mirjalili and Lewis (Citation2016) to solve continuity problems. There are three main behaviours of whales in their search for prey, such as 1) Surrounding their prey, 2) exploitation phase (attacking their prey using bubbles); and 3) exploration phase. Moreover, the TS algorithm and local search are a popular heuristic algorithm. This study offers a combination of these algorithms to optimize the GVRP problem.
WOA is an algorithm to solve a continuous problem (Mirjalili & Lewis, Citation2016). In contrast, GVRP is an NP-hard combinatorial problem solved by discrete search space. Hence, WOA cannot solve a discrete problem. This study develops the HWOA algorithm to solve the GVRP problem. There are five steps suggested in this study: 1) converting the continuous value in the search agent position into travel sequences with Large Rank Value (LRV); 2) changing the position of 10% of search agent based on Tabu search; 3) carry out surrounding preys; 4) starting exploitation phase and exploration phase, and 5) perform a local search. TS and local search procedures are used to improve WOA performance. These are a combinatorial problem-solving procedure that is popularly used by researchers. In local search, the two chosen rules are swap and flip. The pseudo-code of the HWOA algorithm can be seen in algorithm 1. The five steps of HWOA procedures are described in the next section.
3.1. Converting search agent position into travel sequences
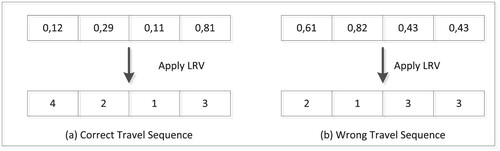
In this step, the search agent position is generated randomly. It must be ensured that there are no repeating numbers on the same search agent (Figure ). To converting search agent position into travel sequences, this study proposed a procedure of the Large Rank Value (LRV). It is an appropriate procedure for transforming continuous numbers into discrete numbers. This procedure is popular and easy to use for combinatorial optimization problems (Ali et al., Citation2019; Utama et al., Citation2020b). In the LRV procedure, search agents’ values are sequenced from the largest to the smallest ones. An illustration of LRV can be seen in Figure . In Figure b, the sequence is incorrect because, in one sequence/route, the vehicle visits the same places twice.
Figure 1. Position of search agent. (1) Accepted population. (2) Rejected population.

Figure 2. LRV Representation.
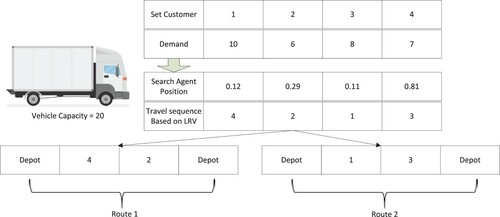
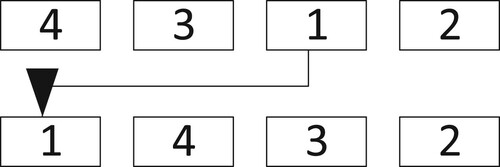
The route determination for each search agent is based on the travel sequence generated from the LRV. Arrangement of route considers the demand of each customer and vehicle capacity. The illustration of route Arrangement is presented in Figure . Furthermore, The results of the route determination are used to calculate the total distribution cost. LRV and the arrangement of the route are applied for each search agent in each iteration.
Figure 3. The illustration of route Arrangement.
3.2. Tabu search algorithm
In the second step, this research offers the TS algorithm to replace the initial search agent WOA. Based on a study by Ene et al. (Citation2016), TS requires a relatively large computational time. In addition, in the case of scheduling (Abdel-Basset et al., Citation2018), 10% of the WOA population is replaced by a heuristic algorithm that produces a more optimal solution than other algorithms. Therefore, this research proposes a 10% search agent WOA replaced using TS. This study applies TS proposed by Poonthalir and Nadarajan (Citation2018) that has five main stages such as 1) Representation of Solution, 2) Initial Solution, 3) Neighborhood Solution, 4) Tabu List, and 5) Criteria for Aspiration and Dismissal. The TS stages are illustrated in Figure , which uses the neighbourhood solution swap, flip, and slide rules (see Figures ). Swap, flip, and slide are carried out by exchanging two positions, reversing work orders, and shifting orders, respectively. Swap and flip in iteration to t are repeated as many as times. Furthermore, slide in iteration to t is repeated
times. To find the solution, we need to check the tabu test using the Tabu list. The Tabu list is employed to avoid repetition in the search for the answer. Aspiration criteria are used to compare the new solution with the previous one. If the new solution's quality is better than the previous solution, it serves as the best one. The dismissal criteria refer to the number of fulfilled iterations.
Figure 4. Flow Chart of Tabu Search Algorithm.
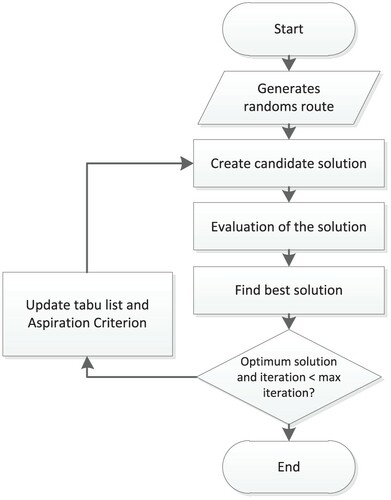
Figure 5. Swap Illustration.
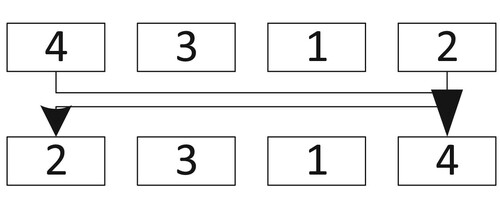
Figure 6. Flip Illustration.
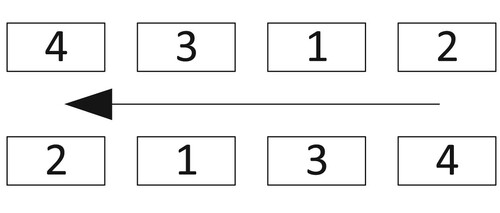
Figure 7. Slide Illustration.
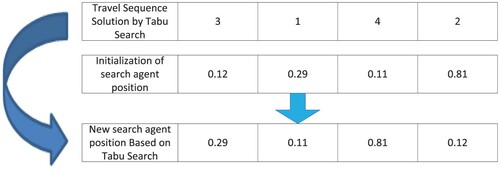
TS is an algorithm to solve combinatorial optimization problems (Pardalos et al., Citation1995). The solution of the TS algorithm in the GVRP problem is a solution in discrete space. So that TS can be combined with WOA, the study proposes an adjustment procedure from discrete space to continuous space. The adjustment procedure is based on the TS solution and the initial search agent position. An illustration of converting the TS solution to the WOA search agent's position is shown in Figure . Converting the TS solution to the WOA search agent's position is carried out at the search agent position initialization stage.
Figure 8. Conversion of Tabu Search Solution to WOA Search Agent Position.
3.3. Surrounding preys
When the humpback whales know their prey's location, they go to their prey and surround it. WOA algorithm assumes that the best solution is the targeted prey that is close to optimum. After the best search agent is determined, another search agent updates the position. Equations of the surrounding prey behaviour are described in equations 6 and 7 below.
(6)
(6)
(7)
(7)
indicates the distance position from the whale to its prey, and
and
are vector coefficients that show in equations (8) and (9).
shows iteration, X* refers to the vector position of the best-obtained solution,
shows the vector position, and | | signifies an absolute value. X* must always be updated in every iteration if a better solution is found. During the experiment (in the exploration and exploitation phase), the value
decreases from 2 to 0, and
is a random vector with a range [0,1].
(8)
(8)
(9)
(9)
3.4. Exploration and exploitation phase
In addition to the prey's behaviour, whales have other interesting behaviours such as attacks by using bubbles and prey-seeking. Attack behaviour using bubbles is called the exploitation phase, and prey-seeking behaviour is called the exploration phase. Humpback whales attack their prey with two approaches, namely 1) circular shrinkage mechanism, and 2) updating the spiral position. In the circular shrinkage mechanism, the value of in equation (8) is lowered from 2 to 0, and the mathematical model of the updated spiral position is formulated in equation (10).
indicates the distance of the whale to its prey (the best-obtained solution).
shows random values with the range [−1,1], and
illustrates constants for defining spiral shapes. The circular shrinkage mechanism to update the whale's position is formulated in equation (11), where
signifies random values with the range [0,1]. The exploration phase is formulated in equations (12) and (13).
(10)
(10)
(11)
(11)
(12)
(12)
(13)
(13)
3.5. Local search procedure
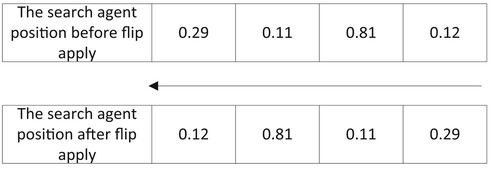
In the last step of the proposed algorithm, we offer the Local Search procedure to improve WOA performance. It is implemented for each iteration. When the solution of WOA is found out in iteration t, this solution is improved using local search. Swap and flip are the two rules proposed in the local search. Figure shows an illustration of a swap for a search agent position. In the swap operation, two positions are chosen randomly and then swapped. Figure illustrates the flip procedure for a search agent position. This procedure is completed by reversing the orders in which jobs are randomly selected. In HWOA, each iteration of t, swap, and flip are repeated as many as 0.01 * number of nodes (customers). Furthermore, LRV is applied in each swap and flip in each iteration for conversion to the route. The result of the route conversion is used to determine the total distribution cost.
Figure 9. Illustration of a swap for a search agent position.
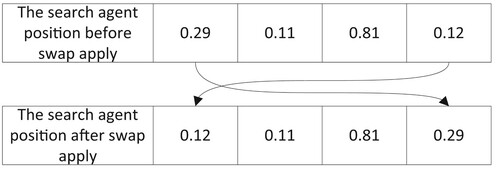
Figure 10 Illustration of the flip procedure for a search agent position.
4. Data collection and experiment procedure
In data collection, data were collected from several previous studies. The number of nodes, distance, demand, and vehicle capacity were taken from Dantzig and Ramser (Citation1959), Gaskell (Citation1967), and Christofides and Eilon (Citation1969)_ENREF_7 that were classified as small, medium, and large cases. Eight variations of the problem were used in the study. These can be seen in Table . Cost, capacity, and speed were also obtained from Zhang et al. (Citation2015). This study employed three-vehicle speed (high speed, medium speed, and low speed). High speed, Medium speed, and low speed were 107, 63, and 43 km/hour, respectively. The experiments were carried out in nine problem variations of GVRP. Fuel cost was 7,3 Yuan/liter (Zhang et al., Citation2015); carbon emission cost was 0,64 Yuan/liter (Zhang et al., Citation2015); and, vehicle-use cost reached 80 Yuan/jam (Zhang et al., Citation2015). The increase in fuel consumption (p) for each additional load (M = 50) is 2%. The customer service time in all customer is 0.1 h.
Table 1. Summary of experimental data.
The experiments were designed to determine the effect of parameters and various speeds on cost and computation time. In this experiment, three problem case was used include 22 (Gaskell, Citation1967), 32 (Gaskell, Citation1967), and 50 nodes (Christofides & Eilon, Citation1969). Experiments were Carried out using different parameters HWOA such as populations and iterations. The population parameter made use of 3 levels, such as 10, 50, and 100 populations (small, medium, and large). The iteration parameter also employed three levels: 10, 50, and 100 iterations (small, medium, and large). The experiment was also conducted in three categories speed, which was carried out to determine the influence of various speeds on each case's total distribution cost. Furthermore, the computation time recording was performed to determine the appropriate parameters of HWOA toward the cost. Hence, 81 experiments were carried out, and the cost of total distribution and computation time was recorded in each experiment.
The performance of the algorithm HWOA was compared with the state of the art algorithms such as TS (Zhang et al., Citation2015), SA (Kuo, Citation2010), ACO (Zhang et al., Citation2019), PSO (Norouzi et al., Citation2017), and GA (Franco et al., Citation2017). Eight variations of the problem were applied to compare each algorithm (see Table ). The comparison was conducted on three variations of vehicle speed include small, medium, and large. The experimental parameters used to compare performance were 100 population and 100 iterations for SA, ACO, PSO, GA, WOA, and HWOA. In the TS algorithm, this research used 100 iterations. The experiment was carried out using Matlab R2014a on a Windows 8 Intel Celeron x64-64 RAM 2 GB processor. The performance was measured using the percentage of the algorithm gap solution on the optimal solution (equation 14) and the Solution Ratio (SR) (equation 15).
(14)
(14)
(15)
(15)
5. Results and discussion
5.1. The comparison of varied parameters and speed towards the cost
As mentioned in section 4, experiments were conducted to determine the effect of comparing varied parameters and speed towards the total distribution cost. Table shows the HWOA algorithm experiment results. It describes that the number of iterations and a large population can minimize the total cost. Other findings are that for a small number of nodes, population parameters and iteration should use the medium parameter. Furthermore, high speed can reduce the cost of GVRP. These findings are consistent with Zhang et al. (Citation2015).
Table 2. Varied parameters and speed comparison towards the cost (yuan).
5.2. The comparison of varied parameters and speed towards computation time
The results of the comparison of parameters and speed vary towards computation time are seen in Table . It demonstrates that the number of iterations and a large population can increase computational time. Interestingly, in small nodes, the computational time required for large parameters is very high, but the total distribution costs are fixed. Therefore, we recommend that for small nodes, the HWOA parameters used are medium. Moreover, results indicate that speed variations do not affect computation time. Meanwhile, the number of nodes affects computation time, in which a significant number of nodes intensify computation time.
Table 3. Results of varied parameter and speed comparison towards the computation time (second).
5.3. The comparison of algorithms
Table compares the total distribution cost of the proposed algorithm toward the state of the art algorithms. Overall, It shows that HWOA gives optimal solutions compare with other algorithms. In the small case, The HWOA and WOA produce the same optimal solution. However, for medium and large cases, HWOA is superior compared with WOA. It is better between other algorithms in all cases.
Table 4. The comparison of algorithms on Total Distribution Cost (yuan).
Moreover, the gap solution toward an optimal solution can be seen in Figure . In the gap solution, the optimal solution is indicated by the percentage average gap solution 0%, which means there is no error. If the solution gap is greater than 0%, it shows that the solution is not good. Based on equation Equation1(1)
(1) 4, The average gap of the solution toward optimal solution values of HWOA, TS (Zhang et al., Citation2015), SA(Kuo, Citation2010), Ant Colony (Zhang et al., Citation2019), PSO (Norouzi et al., Citation2017), GA (Franco et al., Citation2017), and WOA are 0%, 28%, 25%, 15%, 19%, 11%, and 3%, respectively. The results of the average gap solution indicate that the proposed algorithm is more competitive than other algorithms.
Figure 11. The gap solution toward the optimal solution in percent (%)

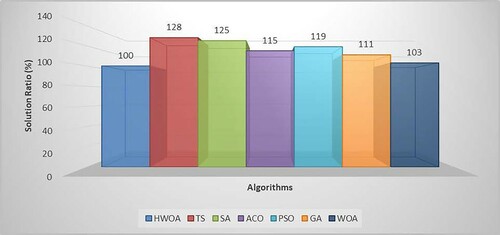
In addition, the average percentage of solution ratio (SR) also proved that the proposed algorithm is better than other algorithms (see Figure ). SR values of HWOA, TS, SA, Ant Colony, PSO, GA, and WOA are 100%, 128%, 125%, 115%, 119%, 111%, and 103%, respectively. Therefore, HWOA proved effective in solving the GVRP problem.
Figure 12. The solution ratio toward an optimal solution in percent (%).
6. Conclusion
This study aimed to develop the HWOA algorithm to minimize the distribution cost comprised of fuel cost, emission carbon cost, and vehicle-use cost. The Hybrid Whale Optimization Algorithm (HWOA) was suggested to solve GVRP inspired by whale behaviour combined with tabu search and local search procedures. This research succeeded in developing the HWOA algorithm to solve the GVRP problem. HWOA was compared to several procedures to test the effectiveness of the algorithm. The experimental results proved that the HWOA algorithm is competitive as compared to other algorithms. Future studies should aim at developing algorithms and problems with dynamic vehicle speeds. The computation time comparison of each algorithm has not been investigated. Hence, it needs further investigation. We also propose that future studies develop the HWOA algorithm with different metaheuristic algorithms to obtain more optimal results.
Disclosure statement
No potential conflict of interest was reported by the author(s).
References
- Abdel-Basset, M., Manogaran, G., El-Shahat, D., Mirjalili, S., (2018). A hybrid whale optimization algorithm based on local search strategy for the permutation flow shop scheduling problem. Future Generation Computer Systems, 85, 129–145. https://doi.org/https://doi.org/10.1016/j.future.2018.03.020
- Abdoli, B., MirHassani, S. A., & Hooshmand, F. (2017). Model and algorithm for bi-fuel vehicle routing problem to reduce GHG emissions. Environmental Science and Pollution Research, 24(27), 21610–21624. https://doi.org/https://doi.org/10.1007/s11356-017-9740-8
- Afshar-Bakeshloo, M., et al. (2016). A green vehicle routing problem with customer satisfaction criteria. Journal of Industrial Engineering International, 12(4), 529–544. https://doi.org/https://doi.org/10.1007/s40092-016-0163-9
- Ali, I. M., Essam, D., & Kasmarik, K. (2019). A novel differential evolution mapping technique for generic combinatorial optimization problems. Applied Soft Computing, 80, 297–309. https://doi.org/https://doi.org/10.1016/j.asoc.2019.04.017
- Baldacci, R., Hadjiconstantinou, E., & Mingozzi, A. (2004). An exact algorithm for the Capacitated vehicle Routing problem based on a Two-Commodity Network Flow Formulation. Operations Research, 52(5), 723–738. https://doi.org/https://doi.org/10.1287/opre.1040.0111
- Bruglieri, M., Mancini, S., & Pisacane, O. (2019). More efficient formulations and valid inequalities for the Green vehicle Routing problem. Transportation Research Part C: Emerging Technologies, 105, 283–296. https://doi.org/https://doi.org/10.1016/j.trc.2019.05.040
- Christofides, N., & Eilon, S. (1969). An algorithm for the vehicle-dispatching problem. Journal of the Operational Research Society, 20(3), 309–318. https://doi.org/https://doi.org/10.1057/jors.1969.75
- Cinar, D., Gakis, K., & Pardalos, P. M. (2015). Reduction of CO 2 emissions in cumulative multi-trip vehicle routing problems with limited duration. Environmental Modeling & Assessment, 20(4), 273–284. https://doi.org/https://doi.org/10.1007/s10666-014-9434-2
- Dantzig, G. B., & Ramser, J. H. (1959). The Truck Dispatching problem. Management Science, 6(1), 80–91. https://doi.org/https://doi.org/10.1287/mnsc.6.1.80
- de Oliveira da Costa, P. R., et al. (2018). A Genetic algorithm for a Green Vehicle Routing problem. Electronic Notes in Discrete Mathematics, 64, 65–74. https://doi.org/https://doi.org/10.1016/j.endm.2018.01.008
- Eguia, I., et al. (2013). Environmental issues in vehicle routing problems. Sustainability Appraisal: Quantitative Methods and Mathematical Techniques for Environmental Performance Evaluation. Springer, 215–241. https://doi.org/https://doi.org/10.1007/978-3-642-32081-1_10
- Ene, S., et al. (2016). A hybrid metaheuristic algorithm for the green vehicle routing problem with a heterogeneous fleet. International Journal of Vehicle Design, 71(1–4), 75–102. https://doi.org/https://doi.org/10.1504/IJVD.2016.078771
- Erdoğan, S., & Miller-Hooks, E. (2012). A Green Vehicle Routing problem. Transportation Research Part E: Logistics and Transportation Review, 48(1), 100–114. https://doi.org/https://doi.org/10.1016/j.tre.2011.08.001
- Eydi, A., & Alavi, H. (2018). Vehicle Routing problem in Reverse Logistics with Split Demands of customers and fuel consumption Optimization. Arabian Journal for Science and Engineering, 44(3), 1–11. https://doi.org/https://doi.org/10.1007/s13369-018-3311-2
- Felipe, Á, et al. (2014). A heuristic approach for the green vehicle routing problem with multiple technologies and partial recharges. Transportation Research Part E: Logistics Transportation Review, 71, 111–128. https://doi.org/https://doi.org/10.1016/j.tre.2014.09.003
- Franco, C., López-Santana, E. R., & Figueroa-García, J. C. (2017). Solving the Interval Green Inventory Routing Problem Using Optimization and Genetic Algorithms. ed. Workshop on Engineering Applications, 556–564.
- Garside, A. K., Sulistyani, X., & Utama, D. M. (2016). Penentuan Rute Distribusi LPG dengan Pendekatan Model Matematis. ed. Prosiding SENTRA (Seminar Teknologi dan Rekayasa), 12–18.
- Gaskell, T. J. (1967). Bases for vehicle fleet scheduling. Journal of the Operational Research Society, 18(3), 281–295. https://doi.org/https://doi.org/10.1057/jors.1967.44
- Ibrahim, M. F., Putri, M. M., & Utama, D. M. (2020). A literature review on reducing carbon emission from supply chain system: Drivers, barriers, performance indicators, and practices. IOP Conference Series: Materials Science and Engineering, 722, 012034. https://doi.org/https://doi.org/10.1088/1757-899X/722/1/012034
- Jabali, O., et al. (2012). Analysis of travel times and CO2 emissions in time-dependent vehicle routing. Production and Operations Management, 21(6), 1060–1074. https://doi.org/https://doi.org/10.1111/j.1937-5956.2012.01338.x
- Jabir, E., Panicker, V. V., & Sridharan, R. (2017). Design and development of a hybrid ant colony-variable neighbourhood search algorithm for a multi-depot green vehicle routing problem. Transportation Research Part D: Transport and Environment, 57, 422–457. https://doi.org/https://doi.org/10.1016/j.trd.2017.09.003
- Karagul, K., et al. (2019). A Simulated Annealing Algorithm Based Solution Method for a Green Vehicle Routing problem with fuel consumption. In T. Paksoy, G.-W. Weber, & S. Huber (Eds.), Lean and Green Supply Chain Management: Optimization Models and algorithms (pp. 161–187). Springer International Publishing.
- Khalilpourazari, S., Pasandideh, S. H. R., & Ghodratnama, A. (2019). Robust possibilistic programming for multi-item EOQ model with defective supply batches: Whale Optimization and Water Cycle algorithms. Neural Computing and Applications, 31(10), 6587–6614. https://doi.org/https://doi.org/10.1007/s00521-018-3492-3
- Kirci, P. (2016). On the performance of Tabu search algorithm for the vehicle routing problem with time windows. Ed. 2016 IEEE 4th International Conference on future Internet of Things and Cloud Workshops (FiCloudW), 22-24 Aug. 2016. 351–354.
- Koç, Ç, & Karaoglan, I. (2016). The green vehicle routing problem: A heuristic based exact solution approach. Applied Soft Computing, 39, 154–164. https://doi.org/https://doi.org/10.1016/j.asoc.2015.10.064
- Kuo, Y. (2010). Using simulated annealing to minimize fuel consumption for the time-dependent vehicle routing problem. Computers & Industrial Engineering, 59(1), 157–165. https://doi.org/https://doi.org/10.1016/j.cie.2010.03.012
- Kuo, Y., & Wang, C. C. (2011). Optimizing the VRP by minimizing fuel consumption. Management of Environmental Quality: An International Journal, 22(4), 440–450. https://doi.org/https://doi.org/10.1108/14777831111136054
- Kwon, Y.-J., et al. (2013). Heterogeneous fixed fleet vehicle routing considering carbon emission. Transportation Research Part D: Transport and Environment, 23, 81–89. https://doi.org/https://doi.org/10.1016/j.trd.2013.04.001
- Li, J., & Zhang, J. (2014). Study on the effect of carbon emission trading mechanism on logistics distribution routing decisions. Syst. Eng. Theory Pract, 34, 1779–1787.
- Masudin, I., et al. (2019). Capacitated Vehicle Routing problems: Nearest Neighbour vs. Tabu search. International Journal of Computer Theory and Engineering, 11(4), 76–79. https://doi.org/https://doi.org/10.7763/IJCTE.2019.V11.1246
- Mirjalili, S., & Lewis, A. (2016). The Whale Optimization algorithm. Advances in Engineering Software, 95, 51–67. https://doi.org/https://doi.org/10.1016/j.advengsoft.2016.01.008
- Niu, Y., et al. (2018). Optimizing the green open vehicle routing problem with time windows by minimizing comprehensive routing cost. Journal of Cleaner Production, 171, 962–971. https://doi.org/https://doi.org/10.1016/j.jclepro.2017.10.001
- Normasari, N. M. E., Yu, V. F., & Bachtiyar, C. (2019). A simulated annealing heuristic for the capacitated green vehicle routing problem. Mathematical Problems in Engineering, 2019, 2358258. https://doi.org/https://doi.org/10.1155/2019/2358258
- Norouzi, N., Sadegh-Amalnick, M., & Tavakkoli-Moghaddam, R. (2017). Modified particle swarm optimization in a time-dependent vehicle routing problem: Minimizing fuel consumption. Optimization Letters, 11(1), 121–134. https://doi.org/https://doi.org/10.1007/s11590-015-0996-y
- Oesterle, J., & Bauernhansl, T. (2016). Exact Method for the Vehicle Routing problem with Mixed Linehaul and Backhaul customers, Heterogeneous Fleet, time Window and Manufacturing capacity. Procedia CIRP, 41, 573–578. https://doi.org/https://doi.org/10.1016/j.procir.2015.12.040
- Osama, S., et al. (2017). Forecast of wind speed based on whale optimization algorithm. ed. Proceedings of the 1st International Conference on Internet of Things and Machine Learning, Liverpool city, United Kingdom, October 17 – 18, 2017. 1–9.
- Pardalos, P. M., et al. (1995). Parallel search for combinatorial optimization: Genetic algorithms, simulated annealing, tabu search and GRASP. ed. Parallel Algorithms for Irregularly Structured Problems, 1995// 1995 Berlin, Heidelberg, 317–331.
- Poonthalir, G., & Nadarajan, R. (2018). A fuel efficient green vehicle routing problem with varying speed constraint (F-GVRP). Expert Systems with Applications, 100, 131–144. https://doi.org/https://doi.org/10.1016/j.eswa.2018.01.052
- Pop, P. C., Matei, O., & Sitar, C. P. (2013). An improved hybrid algorithm for solving the generalized vehicle routing problem. Neurocomputing, 109, 76–83. https://doi.org/https://doi.org/10.1016/j.neucom.2012.03.032
- Sbihi, A., & Eglese, R. W. (2007). Combinatorial optimization and green logistics. 4OR, 5(2), 99–116. https://doi.org/https://doi.org/10.1007/s10288-007-0047-3
- Schröder, M., & Cabral, P. (2019). Eco-friendly 3D-Routing: A GIS based 3D-Routing-model to estimate and reduce CO2-emissions of distribution transports. Computers, Environment and Urban Systems, 73, 40–55. https://doi.org/https://doi.org/10.1016/j.compenvurbsys.2018.08.002
- Shen, L., et al. (2018). Multi-depot open vehicle routing problem with time windows based on carbon trading. International Journal of Environmental Research and Public Health, 15(9), 2025. https://doi.org/https://doi.org/10.3390/ijerph15092025
- Shuai, Y., Yunfeng, S., & Kai, Z. (2019). An effective method for solving multiple travelling salesman problem based on NSGA-II. Systems Science & Control Engineering, 7(2), 108–116. https://doi.org/https://doi.org/10.1080/21642583.2019.1674220
- Stellingwerf, H. M., et al. (2018). Reducing CO2 emissions in temperature-controlled road transportation using the LDVRP model. Transportation Research Part D: Transport and Environment, 58, 80–93. https://doi.org/https://doi.org/10.1016/j.trd.2017.11.008
- Stodola, P. (2020). Hybrid ant colony optimization algorithm applied to the multi-depot vehicle routing problem. Natural Computing, 19(2), 463–475. https://doi.org/https://doi.org/10.1007/s11047-020-09783-6
- Udin, K., Gui, R., & Rahmawan, A. (2017). Green vehicle routing problem with heterogeneous fleet and time windows. ed. Proceedings of the 6th International Conference on Software and Computer Applications, Bangkok, Thailand, February 26-28, 2017. 223–227.
- Utama, D. M. (2019). An effective Hybrid Sine Cosine algorithm to minimize carbon emission on Flow-shop scheduling sequence Dependent Setup. Jurnal Teknik Industri, 20(1), 62–72. https://doi.org/https://doi.org/10.22219/JTIUMM.Vol20.No1.62-72
- Utama, D. M., et al. (2020a). The vehicle routing problem for perishable goods: A systematic review. Cogent Engineering, 7(1), 1816148. https://doi.org/https://doi.org/10.1080/23311916.2020.1816148
- Utama, D. M., et al. (2020b). An effective hybrid ant lion algorithm to minimize mean tardiness on permutation flow shop scheduling problem. International Journal of Advances in Intelligent Informatics, 6(1), 23–35. https://doi.org/https://doi.org/10.26555/ijain.v6i1.385
- Utama, D. M., et al. (2020c). The hybrid whale optimization algorithm: A new metaheuristic algorithm for energy-efficient on flow shop with dependent sequence setup. Journal of Physics: Conference Series, 1569, 022094. https://doi.org/https://doi.org/10.1088/1742-6596/1569/2/022094
- Wang, R., et al. (2018). Solving the green-fuzzy vehicle routing problem using a revised hybrid intelligent algorithm. Journal of Ambient Intelligence and Humanized Computing, 10(2), 1–12. https://doi.org/https://doi.org/10.1007/s12652-018-0703-9
- Xiao, Y., & Konak, A. (2015). A simulating annealing algorithm to solve the green vehicle routing & scheduling problem with hierarchical objectives and weighted tardiness. Applied Soft Computing, 34, 372–388. https://doi.org/https://doi.org/10.1016/j.asoc.2015.04.054
- Xiao, Y., & Konak, A. (2016). The heterogeneous green vehicle routing and scheduling problem with time-varying traffic congestion. Transportation Research Part E: Logistics and Transportation Review, 88, 146–166. https://doi.org/https://doi.org/10.1016/j.tre.2016.01.011
- Xiao, Y., & Konak, A. (2017). A genetic algorithm with exact dynamic programming for the green vehicle routing & scheduling problem. Journal of Cleaner Production, 167, 1450–1463. https://doi.org/https://doi.org/10.1016/j.jclepro.2016.11.115
- Yan, Z., et al. (2018). An Ameliorative Whale Optimization algorithm for Multi-objective optimal Allocation of Water Resources in Handan, China. Water, 10(1), 87. https://doi.org/https://doi.org/10.3390/w10010087
- Yasin, M., & Vincent, F. Y. (2013). A simulated annealing heuristic for the green vehicle routing problem. ed. Proceedings of the institute of industrial engineers Asian conference 2013, Taipe, Taiwan, 19–22 July 2013. 1261–1269.
- Zhang, J., et al. (2015). Vehicle routing problem with fuel consumption and carbon emission. International Journal of Production Economics, 170, 234–242. https://doi.org/https://doi.org/10.1016/j.ijpe.2015.09.031
- Zhang, S., et al. (2019). Ant colony algorithm for routing alternate fuel vehicles in multi-depot vehicle routing problem. Decision Science in Action. Springer, 251–260.