
 ?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.
?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.Abstract
This paper addresses the leader–follower consensus control problem for a nonlinear multi-agent robot system with control input constraint and external disturbances. Robot system is one of the most important practical systems in the industry. Due to the presence of disturbances in most practical systems, this paper considers the issue of finite-time leader–follower consensus control of the nonlinear multi-agent robot system along with actuator saturation and bounded disturbance. The modified terminal sliding mode control method is suggested for the system which is able to guarantee the stability of the overall system and fast finite-time leader–follower consensus control. For two different scenarios, the simulation of multi-agent robot system has been performed. The results show the effectiveness of the proposed control method.
1. Introduction
Multi-agent systems has recently gotten to be an inclusive subject due to its wide requests in many areas, such as power systems, unmanned air vehicles, sensor networks, smart grids, biological systems, robotic teams, formation control, etc. (Hu et al., Citation2020; Hu et al., Citation2020; Hu et al., Citation2020; Li et al., Citation2011; Ma et al., Citation2015; Qin et al., Citation2014; Zhao et al., Citation2014; Zhao & Jia, Citation2015; Zhao & Jia, Citation2016). For getting an overall goal in multi-agent systems, the use of cooperative control is essential and the key idea is to design the distributed controllers on each agent by means of its local neighbouring information. That is, under a distributed local protocol, the agents can work cooperatively to achieve an overall goal. Especially, under the idea of cooperation, the agents in multi-agent systems only share information with their neighbours locally and attempt to reach an agreement to a certain degree.
Nowadays, attention to robust approaches in nonlinear, uncertain, and disturbed systems in various applications has increased dramatically (Shi et al., Citation2017; Wang, Zhu, et al., Citation2020; Wu et al., Citation2019; Xiong et al., Citation2016; Yu et al., Citation2020; Zhu et al., Citation2020). In the case of multi-agent systems, typical shared overall behaviours under cooperative control contain consensus (Chen et al., Citation2016; Feng et al., Citation2016; Hu et al., Citation2016; Wen et al., Citation2014), synchronization (Arenas et al., Citation2008; Lü et al., Citation2004; Pecora & Carroll, Citation1998), flocking (Olfati-Saber, Citation2006; Reynolds, Citation1987; Vicsek et al., Citation1995), and swarming (Yu et al., Citation2013), and much developments have been already realized. The consensus problem generally concerns about how a group of autonomous agents can reach to an agreement on position, velocity, or other certain quantity of criteria. Many of studied multi-agent systems are with single- or double-integrator dynamics (Meng et al., Citation2011; Qin et al., Citation2012; Wei, Citation2008; Wu et al., Citation2012; Yu et al., Citation2010).
In the study of consensus control, the convergence rate has been a significant topic. To be sure, this important performance index contains high interest for studying the effectiveness of a consensus protocol in the context of multi-agent systems. Most of consensus procedures concentrate on asymptotic convergence, where the settling time is unlimited. However, many applications require a high speed convergence commonly described by a finite-time control strategy (Huang et al., Citation2021; Wang, Huang, et al., Citation2020; Wang, Zhu, et al., Citation2020; Xiwei et al., Citation2009). Finite-time control allows some advantageous properties, such as good disturbance rejection and good robustness against uncertainties.
Another issue that needs to be addressed in consensus control is that in most practical control applications, such as those in robot manipulation and aerospace industry, the performance of the controller is directly related to the accuracy of the mathematical model and external disturbances. However, it is difficult to establish an appropriate mathematical model for a large number of nonlinear systems when the systems are complex and highly coupled nonlinear with uncertainties and external disturbances (Chen et al., Citation2020; Wang, Citation1999; Zhang et al., Citation2019) and there are some gaps between mathematical models and actual plant dynamics.
Also, in many practical dynamic systems, physical actuators saturation on hardware indicates an inevitable constraint of the control signal magnitude. Control saturation is one of the most common non-smooth nonlinearity that should be explicitly considered in the control design. The controllers that ignore actuator limitations may give rise to undesirable inaccuracy, severely degrade the performance of system, or even damage the stability of system (Leonessa et al., Citation2009). Hence, the controller design subjected to the control saturation and simultaneously achieving to higher performance is a very practical problem.
Most of the existing consensus protocols have been derived when there is no leader or when the leader is static. Nevertheless, in many missions, a dynamic leader is required. Many applications may require a dynamic leader, which could be virtual for its followers. Its behaviour is independent of the other agents. The leader-following consensus problem for multi-agent systems with Lipschitz nonlinear dynamics is discussed in (Xu et al., Citation2014). Also, the finite-time leader–follower consensus of nonlinear Lagrangian multi-agent systems is considered in (Sharifi & Yazdanpanah, Citation2020) with communication time delays and dynamic parameter uncertainties. Readers may refer to (Li et al., Citation2020; Qin et al., Citation2017; Qin et al., Citation2019; Yu et al., Citation2017) for a more comprehensive overview.
To the best of our knowledge, the input saturations are not frequently considered in the multi-robot systems control. In (Su et al., Citation2013), a low gain feedback control is proposed to avoid the saturation of the system, such that a semi-global leader–follower consensus of linear multi-agent system is achieved.
Furthermore, over the past few years, multi-agent robotic systems control has been become an important research area. In some cases, the network communication process between robotic agents is overlooked, and this case creates a dependency for each agent to maintain a permanent link with nearby units to be able to fulfil its goals. It is clear that in a real physical system network, the evolutions of multi-agent systems are unavoidably affected by disturbances and noises (Li et al., Citation2010; Lin et al., Citation2008; Liu & Jia, Citation2010).
The main concern is to find the effective coordination among autonomous agents to perform the task in order to achieve a high quality of overall performance.
For preventing such problems, sliding mode control (SMC) remains to be one of the most effective approaches in settling bounded disturbances and parameter variations (Edwards & Spurgeon, Citation1998; Utkin, Citation1992; Utkin et al., Citation1999). Typical SMC includes linear sliding-mode (LSM) control and terminal sliding-mode (TSM) control (Feng et al., Citation2002; Feng et al., Citation2013), where the former one is asymptotically stable while the second one is finite-time stable. TSM control can provide faster convergence and higher precision control than the traditional linear sliding mode control, nevertheless, it needs that a disturbance bound to be known.
The main purpose of this paper is to investigate the problem of finite-time leader–follower consensus control of multi-agent nonlinear robot systems with saturation and external bounded disturbances. Accordingly, a new TSM control method is proposed for multi-agent robot systems, which solves the finite-time leader–follower consensus control design for networked systems in the presence of disturbance and control input constraint. The rest of this paper is set as follows. In Section 2, problem formulation is stated. In Section 3, some simulation results are used to demonstrate the effectiveness of the proposed method. Finally, the conclusion is drawn in Section 4.
2. Leader–follower consensus control formulation for a multi-agent robot system by using of terminal sliding-mode method
In this section, the structure of the terminal sliding-mode method is provided for leader–follower consensus control of the multi-agent robot system. We consider a class of multiple mechanical nonlinear systems
(1)
(1) where
,
is the state of the
th system,
is the saturated control input vector,
is an inertia matrix,
is the centripetal and Coriolis matrix,
denotes the friction terms and
is disturbance. Denote
. System (1) can be written as
(2)
(2) where
denotes the velocity.
(3)
(3)
Defined that the upper bound of input control is , which is positive,
, and the saturation function
is expressed as follows:
(4)
(4) From the description above, it is known that
is the error caused by input saturation, which is the most important parameter to solve the control input saturation problem. As adaptive method has omnipotent ability of approximation, so use it to approximate
here.
For the problem of leader–follower consensus control in multi-agent systems, two state error measures are considered for each follower agent, that is, absolute and relative state errors. The absolute error is the state error of an individual follower agent with respect to the reference trajectory (the state of the leader agent). The absolute state errors of the th follower agent are defined by
(5)
(5) The leader agent trajectory
and its derivatives are considered in a
compact set defined by
, and
is a positive constant.
The dynamic equations for the absolute errors and
can be obtained using (2) as
(6)
(6) Which can be re-expressed in the compact form as
(7)
(7) where
(8)
(8)
The relative error is the state error of an individual follower agent with respect to the other follower agent in the multi-agent system. The relative state errors between the th and
th follower agents are defined as
(9)
(9)
Because the common desired trajectory is available to only a subset of the group members and each agent in the group has access to only the information of its neighbour agents, the
th agent may not obtain the absolute state errors and all relative state errors. Considering these facts and using the weighted adjacency matrices
and
, we define lumped state errors
and
including absolute and relative state errors as
(10)
(10) Respectively, where
is the element of the weighted adjacency matrix
. The lumped state errors
and
are the sum of the absolute and relative state errors and only depend on the information of the neighbour agents of the
th agent. The controller for each agent is developed based on the lumped state errors
and
.
In order to facilitate the subsequent theoretical analysis, the lumped state errors and
can be re-expressed in terms of the absolute state errors
and
by some simple algebra transformation as following:
(11)
(11) where
is the element of the graph Laplacian matrix
.
Define
(12)
(12) And then the lumped state errors (12) can be written in terms of the aforementioned quantities as follows:
(13)
(13) where
and
denotes the Kronecker product. Using (7), the dynamic equations for
and
are given by
(14)
(14) Respectively, where
.
The proposed fast terminal sliding manifold is defined as
(15)
(15) where
is positive constant. The first time derivative of the sliding manifold (15) is given by
(16)
(16) Note that there exists no singularity problem in the preceding equation. The terminal sliding manifold given by (15) can be expressed in a compact form as
(17)
(17) where
(18)
(18) Lemma 1 (An-Min et al., Citation2013)
If the sliding manifold is reached, where
, then the absolute state error converges to zero in finite time.
The first time derivative of the sliding manifold (17) is obtained from (16) as
(19)
(19) By premultiplying
on both sides of (19) and then substituting (14) into the resulting expression, we obtain
(20)
(20) Note that if all follower agents’ states
and
approach to the desired trajectories, then
and hence
.
The control law for the th follower agent in the multi-agent system is now given by
(21)
(21)
where
is positive definite, diagonal, and constant matrix; the robust term
, which is determined in the succeeding equations, is used to counteract the external disturbance and the adaptive law for approximated
is obtained from (22).
(22)
(22) Substituting the control law (21) into the error dynamics (20) results in the following dynamic equation for the sliding manifold
(23)
(23) where
and
(24)
(24)
For a sufficiently large positive constant , we construct the following compact set
(25)
(25) where
denotes the maximum eigenvalue of a matrix. Because the sets
and
are compact in
and
, respectively, the variable
has a maximum
on the compact set
.
Next, the robust controller in the control law (21) is defined as (Zeng-Guang et al., Citation2009), (An-Min et al., Citation2008)
(26)
(26) where
is a positive constant satisfying
,
is a positive scalar and
. The following inequality with respect to the robust controller
can be easily obtained from (Zeng-Guang et al., Citation2009), (An-Min et al., Citation2008) as
(27)
(27)
Consider the following Lyapunov function candidate:
(28)
(28) where
. The time derivative of the Lyapunov function (28) along (23) yields
(29)
(29)
By using (22) and (27), the following inequality
(30)
(30) Can be obtained, and by using the well-known inequality
(31)
(31)
The following inequality
(32)
(32) Can be obtained, where
is a positive constant satisfying
and
denotes the minimum eigenvalue of a matrix.
Applying inequalities (30) and (32) to (29), can be upper bounded by
(33)
(33) where
is a positive constant. Thus,
is strictly negative outside of the following compact set
(34)
(34) Which implies that
decreases whenever
is outside the compact set
and therefore, it is concluded that s is uniformly ultimately bounded.
3. Numerical results
To show the effectiveness of the presented distributed TSM control method to robust finite-time leader–follower consensus problem, the following scenarios have been done on the multi-agent system with four robots, where matrices of the robots in Equation (1) are taken as follows:
(35)
(35)
The system parameters are considered as follows:
(36)
(36) The initial positions of the robots are at (−3, 1), (−5, 0.5), (−6, −1) and (−4, −0.5) respectively.
The control parameters are selected as follows:
(37)
(37)
Scenario 1: without disturbance
In this scenario, no disturbance is entered into multi-agent system. The simulation results are illustrated in Figures , among which, Figure shows the states of four mechanical robots in leader following, and Figures depict the control signals.
Figure 1. States of four mechanical robots in leader following.
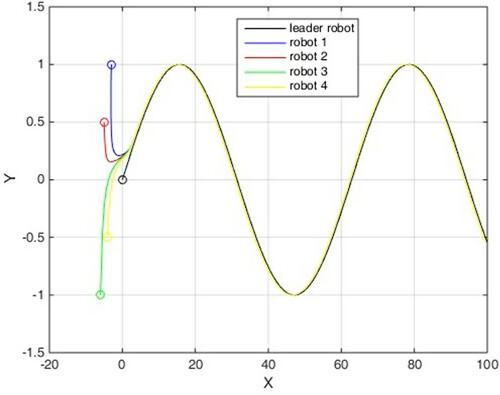
Figure 2. Robot 1 control signals.
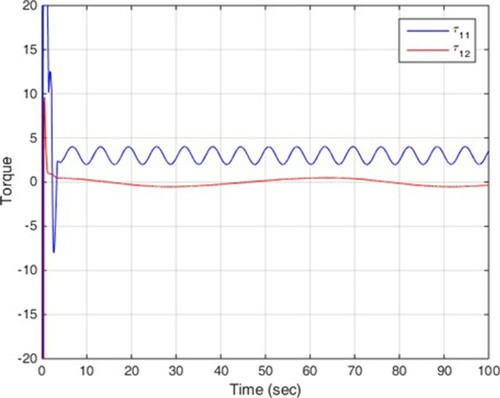
Figure 3. Robot 2 control signals.
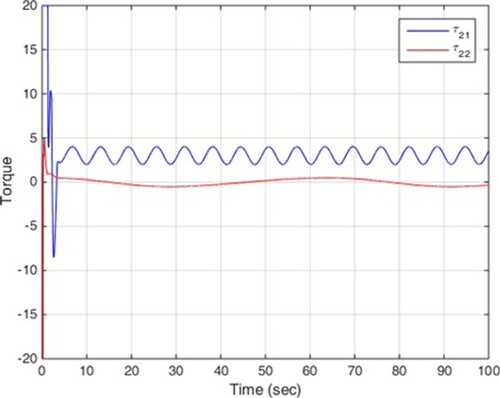
Figure 4. Robot 3 control signals.
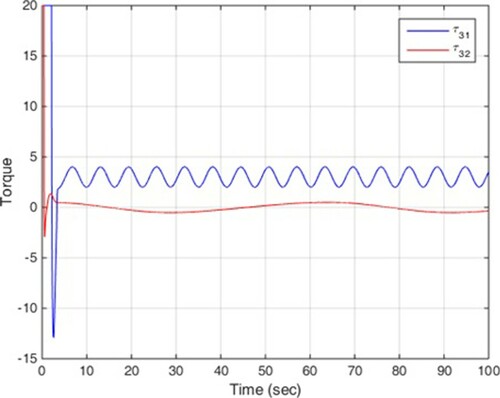
Figure 5. Robot 4 control signals.
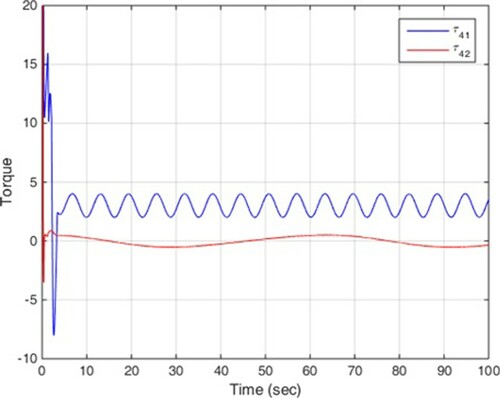
Scenario 2: with disturbance
In this scenario, the following disturbance is entered into multi-agent system.
(38)
(38) The simulation results are illustrated in Figures , among which, Figure shows the states of four mechanical robots in leader following, and Figures depict the control signals.
Figure 6. States of four mechanical robots in leader following.
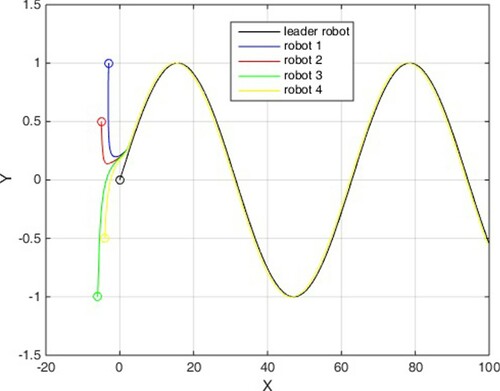
Figure 7. Robot 1 control signals.
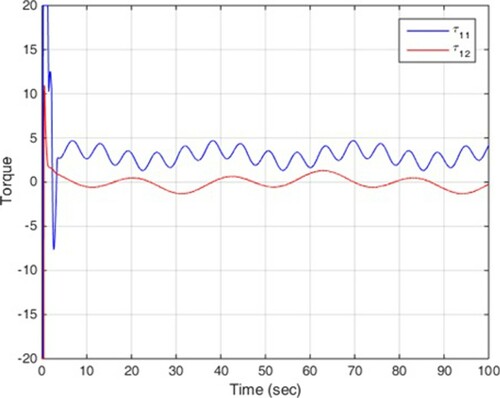
Figure 8. Robot 2 control signals.
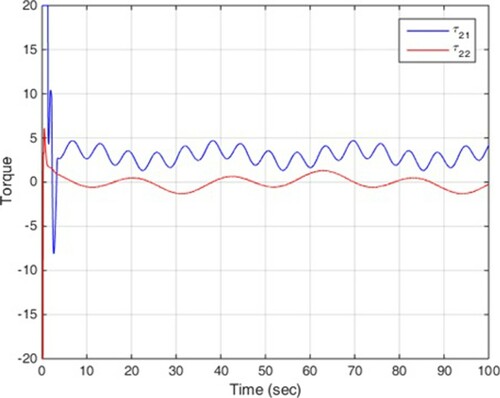
Figure 9. Robot 3 control signals.
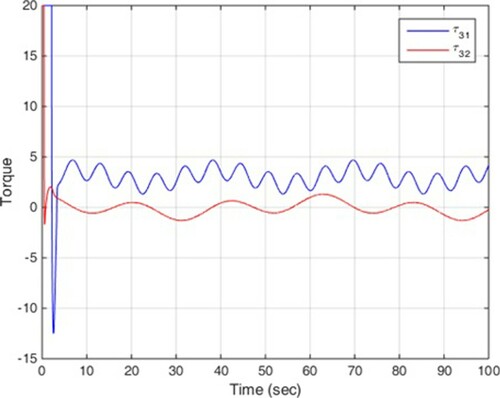
Figure 10. Robot 4 control signals.
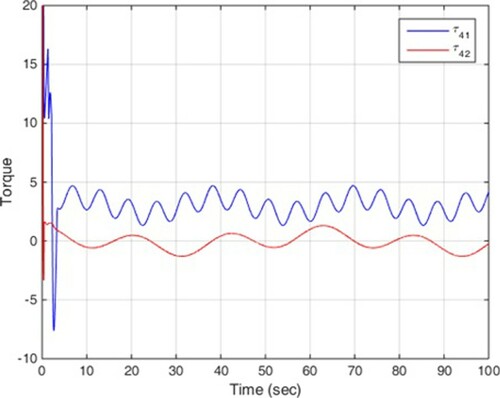
It is clear that the proposed control can achieve the convergence of the tracking errors to zero in finite time. These two scenarios confirm the theoretical results in previous section and it is clear that disturbance does not have much effect on the efficiency of the control method.
4. Conclusion
The most important innovation of this paper is the development and analysis of finite-time leader–follower consensus control using the terminal sliding mode control method for a multi-agent robot system with control input saturation, disturbance and nonlinear effects. By using of Lyapunov theory and the terminal sliding mode control method ensure that all operating modes can be driven onto sliding surface and achieved desired leader–follower consensus in finite time even in the presence of control input constraint and external disturbances. Considering uncertainty, noise and operationalization and practical implementation of the proposed method is a good way for future studies in this field.
Disclosure statement
No potential conflict of interest was reported by the author(s).
References
- An-Min, Z., Krishna Dev, K., & Zeng-Guang, H. (2013). Distributed consensus control for multi-agent systems using terminal sliding mode and Chebyshev neural networks. International Journal of Robust and Nonlinear Control, 23(3), 334–357. https://doi.org/https://doi.org/10.1002/rnc.1829
- An-Min, Z., Zeng-Guang, H., & Min, T. (2008). Adaptive control of a class of nonlinear pure-feedback systems using fuzzy backstepping approach. IEEE Transactions on Fuzzy Systems, 16(4), 886–897. https://doi.org/https://doi.org/10.1109/TFUZZ.2008.917301
- Arenas, A., Diaz-Guilera, A., Kurths, J., Moreno, Y., & Zhou, C. (2008). Synchronization in complex networks. Physics Reports, 469(3), 93–153. https://doi.org/https://doi.org/10.1016/j.physrep.2008.09.002
- Chen, Y., Dong, H., Lü, J., Sun, X., & Liu, K. (2016). Robust consensus of nonlinear multiagent systems with switching topology and bounded noises. IEEE Transactions on Cybernetics, 46(6), 1276–1285. https://doi.org/https://doi.org/10.1109/TCYB.2015.2448574
- Chen, Z., Wang, J., Ma, K., Huang, X., & Wang, T. (2020). Fuzzy adaptive two-bits-triggered control for nonlinear uncertain system with input saturation and output constraint. International Journal of Adaptive Control and Signal Processing, 34(4), 543–559. https://doi.org/https://doi.org/10.1002/acs.3098
- Edwards, C., & Spurgeon, S. K. (1998). Sliding mode control: Theory and applications. Taylor and Francis.
- Feng, Z., Hu, G., & Wen, G. (2016). Distributed consensus tracking for multiagent systems under two types of attacks. International Journal of Robust and Nonlinear Control, 26(5), 896–918. https://doi.org/https://doi.org/10.1002/rnc.3342
- Feng, Y., Yu, X., & Han, F. (2013). On nonsingular terminal sliding-mode control of nonlinear systems. Automatica, 49(6), 1715–1722. https://doi.org/https://doi.org/10.1016/j.automatica.2013.01.051
- Feng, Y., Yu, X., & Man, Z. (2002). Non-singular terminal sliding mode control of rigid manipulators. Automatica, 38(12), 2159–2167. https://doi.org/https://doi.org/10.1016/S0005-1098(02)00147-4
- Hu, W., Liu, L., & Feng, G. (2016). Consensus of linear multi-agent systems by distributed event-triggered strategy. IEEE Transactions on Cybernetics, 46(1), 148–157. https://doi.org/https://doi.org/10.1109/TCYB.2015.2398892
- Hu, J., Wang, M., Zhao, C., Pan, Q., & Du, C. (2020). Formation control and collision avoidance for multi-UAV systems based on Voronoi partition. Science China Technological Sciences, 63(1), 65–72. https://doi.org/https://doi.org/10.1007/s11431-018-9449-9
- Hu, J., Zhang, H., Liu, L., Zhu, X., Zhao, C., & Pan, Q. (2020). Convergent multiagent formation control with collision avoidance. IEEE Transactions on Robotics, 36(6), 1805–1818. https://doi.org/https://doi.org/10.1109/TRO.2020.2998766
- Hu, J. W., Zheng, B. Y., Wang, C., Zhao, C. H., Hou, X. L., Pan, Q., & Xu, Z. (2020). A survey on multi-sensor fusion based obstacle detection for intelligent ground vehicles in off-road environments. Frontiers of Information Technology & Electronic Engineering, 21(5), 675–692. https://doi.org/https://doi.org/10.1631/FITEE.1900518
- Huang, Y., Wang, J., Wang, F., & He, B. (2021). Event-triggered adaptive finite-time tracking control for full state constraints nonlinear systems with parameter uncertainties and given transient performance. ISA Transactions, 108, 131–143. https://doi.org/https://doi.org/10.1016/j.isatra.2020.08.022
- Leonessa, A., Haddad, W. M., Hayakawa, T., & Morel, Y. (2009). Adaptive control for nonlinear uncertain systems with actuator amplitude and rate saturation constraints. International Journal of Adaptive Control and Signal Processing, 23(1), 73–96. https://doi.org/https://doi.org/10.1002/acs.1065
- Li, Z., Duan, Z., Chen, G., & Huang, L. (2010). Consensus of multiagent systems and synchronization of complex networks: A unified viewpoint. IEEE Transactions on Circuits and Systems I, 57(1), 213–224. https://doi.org/https://doi.org/10.1109/TCSI.2009.2023937
- Li, Z., Liu, X., Lin, P., & Ren, W. (2011). Consensus of linear multi-agent systems with reduced-order observer-based protocols. System Control Letters, 60(7), 510–516. https://doi.org/https://doi.org/10.1016/j.sysconle.2011.04.008
- Li, G., Wang, X., & Li, S. (2020). Finite-time consensus algorithms of leader-follower higher-order multi-agent systems with uncertain nonlinearities. Journal of the Franklin Institute, 357(16). https://doi.org/https://doi.org/10.1016/j.jfranklin.2019.12.044
- Lin, P., Jia, Y., & Li, L. (2008). Distributed robust h ∞ consensus control in directed networks of agents with time-delay. System Control Letters, 57(8), 643–653. https://doi.org/https://doi.org/10.1016/j.sysconle.2008.01.002
- Liu, Y., & Jia, Y. (2010). H ∞ consensus control of multi-agent systems with switching topology: A dynamic output feedback protocol. International Journal of Control, 83(3), 527–537. https://doi.org/https://doi.org/10.1080/00207170903267039
- Lü, J., Yu, X., Chen, G., & Cheng, D. (2004). Characterizing the synchronizability of small-world dynamical networks. IEEE Transactions on Circuits Systems I Regular Papers, 51(4), 787–796. https://doi.org/https://doi.org/10.1109/TCSI.2004.823672
- Ma, Q., Lewis, F. L., & Xu, S. Y. (2015). Cooperative containment of discrete-time linear multi-agent systems. International Journal of Robust and Nonlinear Control, 25(7), 1007–1018. https://doi.org/https://doi.org/10.1002/rnc.3124
- Meng, Z., Ren, W., Cao, Y., & You, Z. (2011). Leaderless and leader-following consensus with communication and input delays under a directed network topology. IEEE Transactions on Systems, Man, Cybernetics Part B, Cybernetics, 41(1), 75–88. https://doi.org/https://doi.org/10.1109/TSMCB.2010.2045891
- Olfati-Saber, R. (2006). Flocking for multi-agent dynamic systems: Algorithms and theory. IEEE Transactions on Automatic Control, 51(3), 401–420. https://doi.org/https://doi.org/10.1109/TAC.2005.864190
- Pecora, L. M., & Carroll, T. L. (1998). Master stability functions for synchronized coupled systems. Physical Review Letters, 80(10), 2109–2112. https://doi.org/https://doi.org/10.1103/PhysRevLett.80.2109
- Qin, J., Ma, Q., Shi, Y., & Wang, L. (2017). Recent advances in consensus of multi-agent systems: A brief survey. IEEE Transactions on Industrial Electronics, 64(6), 4972–4983. https://doi.org/https://doi.org/10.1109/TIE.2016.2636810
- Qin, J., Yu, C., & Gao, H. (2014). Coordination for linear multiagent systems with dynamic interaction topology in the leader-following framework. IEEE Transactions on Industrial Electronics, 61(5), 2412–2422. https://doi.org/https://doi.org/10.1109/TIE.2013.2273480
- Qin, J., Zhang, G., Zheng, W. X., & Kang, Y. (2019). Adaptive sliding mode consensus tracking for second-order nonlinear multiagent systems with actuator faults. IEEE Transactions on Cybernetics, 49(5), 1605–1615. https://doi.org/https://doi.org/10.1109/TCYB.2018.2805167
- Qin, J., Zheng, W. X., & Gao, H. (2012). Coordination of multiple agents with double-integrator dynamics under generalized interaction topologies. IEEE Transactions on Systems, Man, Cybernetics Part B, Cybernetics, 42(1), 44–57. https://doi.org/https://doi.org/10.1109/TSMCB.2011.2164523
- Reynolds, C. W. (1987). Flocks, herds and schools: A distributed behavioral model. Computers & Graphics, 21(4), 25–34. https://doi.org/https://doi.org/10.1145/37402.37406
- Sharifi, M., & Yazdanpanah, M. J. (2020). Finite time consensus of nonlinear multi-agent systems in the presence of communication time delays. European Journal of Control, 53, 10–19. https://doi.org/https://doi.org/10.1016/j.ejcon.2019.10.009
- Shi, K., Tang, Y., Liu, X., & Zhong, S. (2017). Secondary delay-partition approach on robust performance analysis for uncertain time-varying Lurie nonlinear control system. Optimal Control Applications and Methods, 38(6), 1208–1226. https://doi.org/https://doi.org/10.1002/oca.2326
- Su, H., Chen, M., Lam, J., & Lin, Z. (2013). Semi-global leader-following consensus of linear multi-agent systems with input saturation via low gain feedback. IEEE Transactions on Circuits and Systems I: Regular Papers, 60(7), 1881–1889. https://doi.org/https://doi.org/10.1109/TCSI.2012.2226490
- Utkin, V. I. (1992). Sliding modes in control and optimization. Springer.
- Utkin, V. I., Guldner, J., & Shi, J. (1999). Sliding mode control in electromechanical systems. Taylor and Francis.
- Vicsek, T., Czirók, A., Ben-Jacob, E., Cohen, I., & Shochet, O. (1995). Novel type of phase transition in a system of self-driven particles. Physical Review Letters, 75(6), 1226–1229. https://doi.org/https://doi.org/10.1103/PhysRevLett.75.1226
- Wang, L.-X. (1999). Automatic design of fuzzy controllers. Automatica, 35(8), 1471–1475. https://doi.org/https://doi.org/10.1016/S0005-1098(99)00044-8
- Wang, J., Huang, Y., Wang, T., Zhang, C., & hui Liu, Y. (2020). Fuzzy finite-time stable compensation control for a building structural vibration system with actuator failures. Applied Soft Computing, 93, Article 106372. https://doi.org/https://doi.org/10.1016/j.asoc.2020.106372
- Wang, J., Zhu, P., He, B., Deng, G., Zhang, C., & Huang, X. (2020). An adaptive neural sliding mode control with ESO for uncertain nonlinear systems. International Journal of Control, Automation and Systems, 1–11. https://doi.org/https://doi.org/10.1007/s12555-019-0972-x
- Wei, R. (2008). On consensus algorithms for double-integrator dynamics. IEEE Transactions on Automatic Control, 53(6), 1503–1509. https://doi.org/https://doi.org/10.1007/978-1-84800-015-5_4
- Wen, G., Duan, Z., Chen, G., & Yu, W. (2014). Consensus tracking of multi-agent systems with lipschitz-type node dynamics and switching topologies. IEEE Transactions on Circuitsand Systems I: Regular Papers, 61(2), 499–511. https://doi.org/https://doi.org/10.1109/TCSI.2013.2268091
- Wu, T., Cao, J., Xiong, L., & Zhang, H. (2019). New stabilization results for semi-Markov chaotic systems with fuzzy sampled-data control. Complexity, 2019. Article ID 7875305. https://doi.org/https://doi.org/10.1155/2019/7875305
- Wu, Z., Fang, H., & She, Y. (2012, October). Weighted average prediction for improving consensus performance of second-order delayed multi-agent systems. IEEE Transactions on Systems, Man, and Cybernetics, Part B (Cybernetics), 42(5), 1501–1508. https://doi.org/https://doi.org/10.1109/TSMCB.2012.2189384
- Xiong, L., Zhang, H., Li, Y., & Liu, Z. (2016). Improved stability and H∞ performance for neutral systems with uncertain markovian jump. Nonlinear Analysis: Hybrid Systems, 19, 13–25. https://doi.org/https://doi.org/10.1016/j.nahs.2015.07.005
- Xiwei, L., Tianping, C., & Wenlian, L. (2009). Consensus problem in directed networks of multi-agents via nonlinear protocols. Physics Letters A, 373(35), 3122–3127. https://doi.org/https://doi.org/10.1016/j.physleta.2009.06.054
- Xu, W., Cao, J., Yu, W., & Lu, J. (2014). Leader-following consensus of non-linear multi-agent systems with jointly connected topology. IET Control Theory and Applications, 8(6), 432–440. https://doi.org/https://doi.org/10.1049/iet-cta.2013.0813
- Yu, W., Chen, G., Cao, M., & Kurths, J. (2010). Second-order consensus for multiagent systems with directed topologies and nonlinear dynamics. IEEE Transactions on Systems, Man, and Cybernetics, Part B (Cybernetics, 40(3), 881–891. https://doi.org/https://doi.org/10.1109/TSMCB.2009.2031624
- Yu, W., Chen, G., Cao, M., Lü, J., & Zhang, H.-T. (2013). Swarming behaviors in multi-agent systems with nonlinear dynamics. Chaos, 23(4). Art. No. 043118. https://doi.org/https://doi.org/10.1063/1.4829631
- Yu, D., Mao, Y., Gu, B., Nojavan, S., Jermsittiparsert, K., & Nasseri, M. (2020). A new LQG optimal control strategy applied on a hybrid wind turbine/solid oxide fuel cell/in the presence of the interval uncertainties. Sustainable Energy Grids and Networks, 21, 100296. https://doi.org/https://doi.org/10.1016/j.segan.2019.100296
- Yu, W., Wang, H., Cheng, F., Yu, X., & Wen, G. (2017). Second-order consensus in multiagent systems via distributed sliding mode control. IEEE Transactions on Cybernetics, 47(8), 1872–1881. https://doi.org/https://doi.org/10.1109/TCYB.2016.2623901
- Zeng-Guang, H., Zou, A. M., Cheng, L., & Tan, M. (2009). Adaptive control of an electrically driven nonholonomic mobile robot via backstepping and fuzzy approach. IEEE Transactions on Control Systems Technology, 17(4), 803–815. https://doi.org/https://doi.org/10.1109/TCST.2009.2012516
- Zhang, X., Wang, Y., Chen, X., Su, C. Y., Li, Z., Wang, C., & Peng, Y. (2019). Decentralized adaptive neural approximated inverse control for a class of large-scale nonlinear hysteretic systems with time delays. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 49(12), 2424–2437. https://doi.org/https://doi.org/10.1109/TSMC.2018.2827101
- Zhao, L., & Jia, Y. (2015). Distributed adaptive containment control for second-order multi-agent systems via NTSM. Journal of the Franklin Institute, 352(11), 5327–5341. https://doi.org/https://doi.org/10.1016/j.jfranklin.2015.09.009
- Zhao, L., & Jia, Y. (2016). Neural network-based adaptive consensus tracking control for multi-agent systems under actuator faults. International Journal of Systems Science, 47(8), 1931–1942. https://doi.org/https://doi.org/10.1080/00207721.2014.960906
- Zhao, L., Jia, Y., & Xie, Y. (2014). Robust transcale decentralised estimation fusion for multisensor systems based on wavelet packet decomposition. IET Control Theory and Applications, 8(8), 585–597. https://doi.org/https://doi.org/10.1049/iet-cta.2013.0285
- Zhu, G., Wang, S., Sun, L., Ge, W., & Zhang, X. (2020). Output feedback adaptive dynamic surface sliding-mode control for quadrotor UAVs with tracking error constraints. Complexity, 2020. Article ID 8537198. https://doi.org/https://doi.org/10.1155/2020/8537198