
 ?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.
?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.ABSTRACT
Numerous challenges in automotive production lead to an increased need for transparency and optimization. Real-Time-Location-Systems (RTLS) is a key tool for achieving this goal. They enable intelligent and automated production processes. Existing solutions such as Ultra-Wideband, Bluetooth-Low-Energy, or Radio-Frequency-Identification have drawbacks in costs, range, or accuracy. 5G is a newly developing standard, recently including high-accuracy positioning. It is unclear, however, if 5G positioning has reached industrial maturity. This contribution aims to determine the state-of-the-art of 5G positioning by performing a systematic literature review and comparing its findings to industrial positioning requirements. 143 articles were analyzed and categorized as: the fundamentals of radio-frequency positioning, an overview of existing solutions, the state-of-the-art, and the maturity of 5G as an industrial positioning system. Results show that, theoretically, centimeter-level accuracies are pursued. However, practical tests are rarely conducted. Concluding, 5G positioning shows great potential, but industrial pilots are required to validate the theoretical characteristics.
1. Introduction
The automotive industry is in a volatile environment with growing competition, customer expectations with an increasing product portfolio, including the change from conventional combustion engines to electrified vehicles (Ivanov et al., Citation2018; Krzywdzinski, Citation2019; Martinez et al., Citation2021). The concept of Industry 4.0 is a top trending topic in both business and academic research (Nardo et al., Citation2020). It provides advantages such as flexibility, efficiency, effectiveness, product safety, and quality in manufacturing (D. Daqiang Guo et al., Citation2020; Sony, Citation2020). With this and further improvements in the Internet of Things (IoT)- a continuous strive for optimization, transparency, and innovation is required in order to be competitive in the long term. (Ben-Daya et al., Citation2019) state that companies need to be extremely agile and possess structural flexibility to survive. A key factor for this is the location information (Löcklin et al., Citation2021; Posluk et al., Citation2021; You et al., Citation2021). In automotive production, this is the positioning (also called localization) of vehicles, components, and tools. The real-time localization systems (RTLS) and processing of its data not only create transparency but also enable automatic process control (Ilie-Zudor et al., Citation2016). For this reason, positioning features with high-accuracy are becoming more and more important in many verticals involved with 5G (3GPP, Citation2020b). While some solutions for providing the location data already exist, drawbacks in different areas create hurdles in introducing and maintaining the usage of real-time-location information within the production. Many publications and reviews on existing indoor positioning systems already exist. (Klaithem & Kamel, Citation2011; Liu et al., Citation2007a; Yanying et al., Citation2009) present early solutions and describe the importance of indoor positioning systems. They show its use with applications such as asset tracking, personal location information and inventory management. While (Kumar et al., Citation2014; Maghdid et al., Citation2016; Xiao Jiang et al., Citation2016) describe challenges such as the development of infrastructure, high time to fix or power consumption for existing solutions. Since the demands for indoor positioning is faced with complex environments, other options such as fusion based positioning have been studied (X. Daqiang Guo et al., Citation2020). In addition, guidelines for production management regarding real time location systems are proposed due to its beneficial use (Rácz-Szabó et al., Citation2020). (Ahasanun et al., Citation2020; Kim Geok et al., Citation2021) provide an up-to-date survey on methods and solutions for indoor positioning.
Nevertheless, newly developed location technologies and standards are constantly being developed to create improvements. These are increasing position accuracy, lowering costs and latency, or simplifying the IT- landscape in order to monitor and control the resources involved in the production process in the best possible way.
The new 5G cellular standard is a promising technology for this purpose. In addition to its powerful properties in communication, it was recognized as a possible location technology. 5G has many advantages compared to other positioning solutions. In addition to global standardization, it also promises high process reliability – a prerequisite for industrial usage (Xin et al., Citation2019).
However, the requirements for precise positioning only started to be included in the requirements for the standardization of 5G after the first Release 15 by the 3rd Generation Partnership Project (3GPP), -in late 2017. The 3GPP is a worldwide cooperation of standardization bodies for standardization in mobile communications. Following Release 15, the positioning requirements were mentioned independently in the specification of Release 16 in mid-2020 (3GPP, Citation2020b). Due to great industrial interest, it was focused on and detailed in the future Releases (Release 17 and Release 18) (3GPP, Citation2021d). Using 5G positioning capabilities next to its communication purpose will create synergy by utilizing one infrastructure for two purposes. The problem here is that the standardization promises great potential but has hardly been tested in practice so far due to its early stage of development. First, laboratory tests and simulations show the potential of centimeter-accurate location (Ojas & Rappaport, Citation2021). However, there is no realistic testing in an industrial environment. The production processes in the automotive industry are characterized by larger physical space with more metallic objects of irregular sizes and link blockage caused by machines, which makes positioning conditions considerably more difficult (Slovak et al., Citation2019; Tao Jiang et al., Citation2021). Companies build new production sites and update their existing infrastructure regularly. Since 5G campus networks are already considered for many plants, an overview of the industrial maturity of 5G positioning and its comparison to existing solutions is needed.
While many publications regarding the improvement of 5G positioning procedures and algorithms exist, the maturity of the technology for industrial usage is not yet determined in the literature. For this reason, this contribution focuses on the state of the art of 5G as a positioning technology for automotive production. This is done by performing a systematic literature review that also reviews the underlying theoretical foundations of radio positioning. The methodology is described in Section II. A background in the theory of positioning is then provided, combined with an overview of the main positioning technologies and standards that are currently available (Section III). This is followed by an examination of the specific requirements in automotive production (Section IV) and compared to the state of the art of 5G positioning (Section V). Finally, a conclusion is given in Section VI.
2. Methodology of the systematic literature review
This section provides an overview of the mythology and methods used for the systematic literature review. It is separated in the literature search plus selection strategy, and the bibliometric description of the search results in order to provide scientific standards for reliability, validity and objectivity. To achieve this goal, the structured method described by (Kraus et al., Citation2020) was used and is described in the following subsection.
2.1. Literature search and selection strategy
(Kraus et al., Citation2020) separate the literature search and selection into the following main steps. These are further described in more detail below:
(1) Preparation
(2) Identifying and evaluating studies
(3) Extracting and synthesizing data
A general understanding of the underlying topic is needed. Clear definitions need to be created, and existing literature should be used in order to highlight important issues and develop frameworks for research gaps in step one (preparation). Keywords are identified and complemented throughout the preparation while first literature research and cross-reading of papers is conducted. Also, the relevant databases are determined. Then the search strings are created by combining the identified keywords (see ) using Boolean operators and filtering for relevant results in step two (e.g. by year, article types or subject areas). For this research, online databases were used due to the novelty of 5G positioning (more specifically, Web of Science, ScienceDirect and IEEE). The research was conducted in English and German.
Figure 1. Keywords and search string generation.

After searching the databases, the relevant literature is identified and evaluated by multiple selection rounds. First, the titles are used as the first indication of relevance. The next round uses the abstract and introduction as a basis. After that, the sections and subsections are analyzed. Based on this, the relevant publications are analyzed in detail to extract and synthesize data. Then the papers are read in three passes. This helps in selecting the relevant sections and information. The first pass serves as a quick scan to get an overview of the paper. The title, abstract, introduction and conclusion are read, and the theoretical foundation and references are checked. In the second pass, the content is detailed by analyzing the main sections of the publications and understanding the tables and figures. Detailed information, such as proofs or code, is ignored at this stage. In the last pass, the paper is fully analyzed. Concluding, the publications are sorted into the three categories researched in this paper:
Theoretical foundations of the radio frequency positioning
Overview of existing solutions and 5G positioning
Comparison to the requirements in automotive production
2.2. Bibliometric description
The topic of positioning indoors and in the industry has been a subject of study for many years, going back to the early 2000s (Christ & Lavigne, Citation2000). Searching a database (for example, -Web of Science) for publications which includes the general topic of location technologies and indoor or production, a total of 6348 publications can be found. Analyzing these publications by year shows that research started becoming more common around 2005, with the first peak around 2009 and then becoming more prominent after 2012 with a continuous incline peaking at 2019 (see appendix A1). By separating the technologies discussed in this contribution, it can be determined at which point in time each positioning technology was focused on by researchers. While Wi-Fi positioning started gaining interest in 2012 and 3136 search results in total, UWB was already prominent since 2003 and 2952 results. RFID accounts for 1467 publications since 2006 and Bluetooth Low Energy (BLE) with 838. 5G, however, only started emerging in 2014 and has been gaining interest ever since. To analyze the search results further and to find the most discussed literature concerning 5G positioning, a map was created connecting the publications by their citations once for all and once including only recent publications after 2019. This was used as a baseline moving forward (see appendix A2 and A3).
A detailed protocol of the systematic literature search can be seen in . From the three databases Web of Science, Science Direct and IEEE, a total of 1454 publications are found using the methods described in the previous subsection. From this, 412 are excluded since the content is outdated regarding the research of this paper and 209 are duplicates. In the next round 290 are excluded due to a mismatch in the topic from the title and 86 from a mismatch based on the abstract, introduction and conclusion. The final 457 publications are analyzed in detail. Then 160 were further excluded from these since the content’s relevancy is questionable or updated in other publications. This results in 297 analyzed publications, of which 143 are referenced in this paper.
Figure 2. Protocol of the systematic literature search.
For further details, the division of the publications sorted by year can be seen in . The majority (71.33 %) of the publications are from recent years and not older than 2016, with more than half (58,74 %) not older than 2018. The earlier references (2001 and before) are publications and regulations regarding the first usage of radio frequency positioning.
Figure 3. Division of the publications sorted by year.
3. Theoretical foundations of radio frequency positioning
This section presents the fundamentals about concepts and characteristics of radio wave-based positioning. They are divided into the methods used for determining the position and the technology used for transmitting the signal with its information. In addition, an overview of existing positioning systems and their capabilities is provided that combines the technologies and methods.
3.1. Basic approaches to positioning determination
There are different approaches to calculating the position using electromagnetic waves. The main methods in the context of automotive production are explained below. These are time-based, signal-characteristic-based, and direction-based methods. Different combinations of these methods are the basis of all localization technologies considered further (Zekavat & Buehrer, Citation2019). provides an overview of the advantages and disadvantages of these methods.
Table 1. Summary of different positioning determination methods (Kim Geok et al., Citation2021).
Time-based position determination
The time of arrival estimation (TOA – also called Time of Flight – TOF) enables the measurement of distances. Here, multiple base stations (also referred to as anchors/nodes) work together to locate a target object using triangulation. It is assumed that the positions of all base stations are known. Three are needed with LOS for in-plane precise positioning (S. W. Chen et al., Citation2016). Under certain circumstances, multiple base stations may cooperate to identify their own position. For positioning, the target object transmits a signal with a timestamp (Henk et al., Citation2009). The base stations calculate how far they are from the target object based on the respective arrival times. With larger available bandwidth and sampling rate, the estimated performance will increase (Gezici et al., Citation2005). The distance Ri is proportional to the time between transition and reception (see Equationequation (2)(2)
(2) ). (Faheem et al., Citation2019; Zekavat & Buehrer, Citation2019)
By calculating the difference τ between the time of arrival at the base stations tBi and tBj and the time of transmission ts, the following equations are obtained for the plane case. xi and yi are the coordinates of the base station:
And
The circular formula is obtained by reshaping:
If the equations of the stations are equated, the positions can be determined based on the intersection points. A visual example with three basic stations is shown in . (Zekavat & Buehrer, Citation2019)
Figure 4. Triangulation using TOA (Zekavat & Buehrer, Citation2019).
Although TOA is a fundamentally robust technique, it has some drawbacks:
It requires that all base stations and targets be precisely synchronized. A slight timing error can lead to a significant error in calculating the distance Ri. (Shen & Molisch, Citation2011)
A timestamp must be added to the transmitted signal so the base stations can calculate the time it takes for the signal to arrive. This additional timestamp increases the complexity of the transmitted signal and may lead to an additional source of error (Tahat et al., Citation2016).
The positions of the base stations must be known. If the position of the base station changes, errors occur in the determination of the position of the target object.
Synchronization between base stations and target objects can be circumvented by sending the signal back and measuring the time of the round trip. This procedure is also referred to as Round Trip Time (RTT) (Zekavat & Buehrer, Citation2019). A schematic representation of the calculation can be seen in .
Figure 5. Calculation of RTT (Al-Kadi & Zorn, Citation2020).
The signal propagation time is calculated by measuring the time between sending (t0) and receiving (t3) the signal. However, this also includes the processing time in the target object (between t1 and t2). Subtracting the processing time from the round-trip time and dividing the result by two yields the time of flight tf (see Equationequation (5)(5)
(5) ). As before, the distance between the objects can be calculated by multiplying the speed of light. A drawback of using the RTT is that the response needs processing capabilities which can become a problem with high amounts of RTT inquiries (Guangyi Guo et al., Citation2019).
Another method is the Time Difference of Arrival (TDOA). TDOA does not measure the time of the signal from the target to the base stations but the difference in time with which the signal arrives at two different base stations. Like TOA, the positions of the base stations must be known. In the plane case, three base stations and two-time differences are needed to determine the position (one more for the position in space). The position determination is shown in . The base station that the signal reaches first becomes the reference base station. As soon as the signal reaches the second base station, a hyperbola can be formed based on the time difference. This hyperbola is the area in the plane where the difference between two fixed points is constant. The second time difference results in a second hyperbola that defines the target’s position at the intersection with the first . A significant advantage over TOA is that only the base stations must be synchronized. Not, however, the base station with the target object, since only the arrival times of the same package at the base stations are used for computation. Accordingly, the calculation is similar to TOA. However, since the time of the transmitter ts is not known, this variable is eliminated by subtracting Equationequations (2)(2)
(2) and (Equation3
(3)
(3) ): (Laoudias et al., Citation2018a; Tahat et al., Citation2016)
Figure 6. Position determination using TDOA.
The transformation results in the equation of a hyperbola. If these are set equal, the position of the transmitter can be determined based on the intersection points (see ). This procedure can be carried out in the uplink (target object to base station) or downlink (base station to target object). (Zekavat & Buehrer, Citation2019)
Signal-based Position Determination
The position can also be determined by using the radio signals properties. This is a simpler but, therefore, widely used approach. Similar to TOA, the Received Signal Strength Indicator (RSSI) calculation calculates the position by triangulating different base stations with the target object (see ). The higher the received signal strength, the closer the object is to the base station. Unlike TOA, however, it does not measure the time but the strength of the received signal, which loses strength over distance. The signal strength indicates the distance between the base station and the target object. A disadvantage of this method is that the environment strongly influences the signal strength using reflections or shadows from walls or objects (Rusli et al., Citation2016). Especially if there is no direct line of sight between the base station and the target object. (Faheem et al., Citation2019; Zekavat & Buehrer, Citation2019)
Another option is to use the Channel State Information (CSI). The information extracted from a radio packet based on orthogonal frequency diversity multiplexing (OFDM) can be used to localize the transmitter. The OFDM converts information on a band on several altered subcarriers. Since it uses different subcarriers, it can use more data than RSSI and provide location information using fingerprinting and triangulation. (Minseuk et al., Citation2020; Di; He et al., Citation2018).
Reference Signal Received Power (RSRP) or Reference Signal Received Quality (RSRQ) are based on RSSI. While the RSRP is used to determine the received signal power and quality, it can be combined by creating a radio map of a given area like CSI. The measurements are collected at known positions and saved to a database. By comparing the known values with received values of a target object, the “fingerprint” of that signal constellation can be matched and the position determined. (Li, Lei, and Zhang Citation2020)
Direction-based Position Determination
The Angle of Arrival estimation (AOA – also called Direction of Arrival DOA) allows base stations to calculate the angle of arrival of the transmitted signal. For this, the base stations need antenna arrays (Xiong and Jamieson Citation2013). These antenna arrays can use the incoming or outgoing signal to determine the direction from which this signal was transmitted. Thus, the position in the plane can already be determined with two base stations (three for the determination in space) (Peng and Sichitiu 2006). The position of the base stations must be known (see ). Although the base stations and the target object do not have to be synchronized, the base stations are characterized by higher investment and energy costs. The accuracy is also influenced by noise, NLOS and multipath (Ma et al. 2018). The same concept can be used with the Angle of Departure (AOD). (Al-Kadi and Zorn Citation2020)
Figure 7. Position determination using AOA.
The angle Θi can be calculated with the following Equationequation (7)(7)
(7) :
3.3. Comparison of the state-of-the-art radio positioning systems
Positioning systems have been included in the definition of IoT and can be classified into two main categories; global and local (Nasir et al., Citation2019; Xu et al., Citation2018). Global navigation satellite systems (GNSS) like GPS, GLONASS or GALILEO can achieve accuracies of a few meters with global coverage (Dougherty et al., Citation1995). Accuracy can be enhanced with RTK- capable GNSS receivers down to a few cm (Jackson et al., Citation2018). Since, for indoor environments, a multitude of complications are introduced like multipath effects, fading, reflections, shading and interactive interferences, the common GNSS cannot establish an accurate indoor positioning with the needed line of sight (LOS) and is therefore not suitable. For this reason, they will not be detailed in this paper. (Fei et al., Citation2019; Füchtenhans et al., Citation2021; Liu et al., Citation2007b; Xuyu Wang et al., Citation2014).
For indoor environments, various active and passive local positioning systems based on radio frequency technologies have been developed. An overview of technologies relevant to automotive production is provided in with their core advantages and disadvantages. Following, the leading technologies UWB, Bluetooth, Wi-Fi, RFID, and Cellular will be described.
Table 2. Summary of radio-based technologies for indoor positioning (Kim Geok et al., Citation2021).
3.4. Ultra-wideband (UWB)
The development of Ultra-Wideband (UWB) technology began in the 1960s for radar applications. Later, it was extended using the orthogonal frequency division multiplexing (OFDM) method. This method converts wideband signals into narrowband orthogonal signals, which are modulated over many subcarriers at a relatively low data rate. The number of subcarriers is specified in thousands of k. For example, an OFDM-2k has 2,096 subcarriers. The IEEE.15.3 standard was used to standardize the data transmission technology. Here, however, it competed with Wi-Fi and was subsequently specified as an impulse radio technology in the IEEE 802.15.4a standard. Compared to other technologies, UWB transmits over a broad frequency spectrum between 3.1 GHz and 10.6 GHz (Ramos et al., Citation2016). It uses nano-pulses of about two nanoseconds which are easy to distinguish from reflections (Shi & Ming, Citation2016). This enables an accuracy of up to ±10 cm at LOS (Line of Sight) by calculating ToA, TDOA and AoA. (Al-Kadi & Zorn, Citation2020)
Due to its properties, UWB has many advantages like protection from multipath intrusion, low power consumption, and large data rates suitable for wearable networks and body-centric applications (Bharadwaj et al., Citation2015; Gezici & Poor, Citation2009; Da Zhang et al., Citation2010). It also, due to its low power special density, has less interference with other radio technologies (Elsanhoury et al., Citation2022) and can offer sub-meter accuracy for NLOS (Non Line of Sight) (Hanssens et al., Citation2018). Disadvantages are device synchronization, human body shadowing and the required complex infrastructure and the associated high costs (Hernandez et al., Citation2008; Mahfouz et al., Citation2008; Xu et al., Citation2018).
3.5. Bluetooth low energy (BLE)
BLE positioning is a beacon-based method using ranging or fingerprinting, and in the latest developments AOA and AOD (Giovanni et al., Citation2021). It has low deployment costs and is widely distributed (Zuo et al., Citation2018). The signal transmits and receives at 79 different channels in the range between 2.4 GHz and 2.4835 GHz (Chowdhury et al., Citation2015). It was further developed by Apple Inc. to work with lower power and lower costs than conventional Bluetooth or Wi-Fi (Ding-Yu Liu et al., Citation2016; Feng et al., Citation2015; Guoquan et al., Citation2018; Sadowski & Spachos, Citation2018b). The drawbacks are that the accuracy is limited to 1.5 – 2-5 m with 90 % precision (Blasio et al., Citation2018) and the interference with Wi-Fi bands (Byunghun et al., Citation2015).
3.6. Wireless fidelity (Wi-Fi)
Wi-Fi is a Wireless Lan Area Network (WLAN) and common technology in broadband communications (Haotai Sun et al., Citation2020). It uses unlicensed frequencies in the range of 2.4 GHz and 5 GHz (Ning et al., Citation2013), and with the newest evolution of the standard IEEE 802.11ax also 6 GHz bands (Lee et al., Citation2019). A benefit of using Wi-Fi is its simple off-the-shelf availability and widespread usage with existing infrastructure (Bakri et al., Citation2020; Sosa-Sesma & Perez-Navarro, Citation2016). WLAN uses positioning as a secondary function next to the communication purpose (Hilty et al., Citation2012). Positioning methods include AOA (Cidronali et al., Citation2010), triangulation (Rusli et al., Citation2016; Wang Yuan et al., Citation2014), RSSI- based fingerprinting (Ren et al., Citation2019a, Citation2019b) and CSI-based fingerprinting (Hao Chen et al., Citation2017; Shi et al., Citation2018). From these methods, fingerprinting provides the best performance and allows for easy implementation and NLOS measurements without specialized hardware (Jaffe & Wax, Citation2014; Laoudias et al., Citation2018b). The accuracy is provided with about 2 ~ 3 m but can be heavily affected by barriers, multipaths of crowdedness, and the scanning time of 3 ~ 4 seconds by smartphones, resulting in low refreshment rates (Byunghun et al., Citation2015).
3.7. Radio-frequency identification (RFID)
RFID is a wireless system that identifies objects using readers and tags. The tags are divided into active and passive. Passive tags do not have an energy source and operate in a shorter range. They are powered by electromagnetic energy transmitted from the reader (Parkash et al., Citation2012). Active tags have their own power source and thus a more extended range. The tags pick up the signals from the readers and then modulate them. An identification number can be sent with the signal. To use RFID as a localization technology, triangulation of the signals is used with the inclusion of RSSI. RFID is a cheap and adaptable identification of devices or individuals for harsh indoor scenarios (Chon et al., Citation2004). However, since RFID localization is mainly used inside buildings, reflections and shadows result in inaccuracies. To increase the accuracy, reference tags and reference readers can be used, which analyze the reference data according to LANDMARC (Location Identification Based on Dynamic Active RFID Calibration) and include them in the position calculation. However, this is associated with increased costs and effort (Zekavat & Buehrer, Citation2019). Latest developments include methods such as PDOA, which result in simulations achieving dm-level localization accuracies (Yunlei Zhang et al., Citation2021b).
3.8. Cellular network
The mobile radio network can also be used for localization since the introduction of the GSM (Global System for Mobile Communications) (Kyamakya & Jobmann, Citation2005) and its first localization activities in 1996 (Raulefs R. Del Peral-Rosado et al., Citation2018). 3 G proposed basic positioning enhancements in (3GPP, Citation2001) with up to 200 m accuracies. These positioning requirements were based on usage in the cellular coverage and locating emergency calls (FCC, Citation1996). For LTE, a positioning protocol was introduced, and accuracy requirements were between 39 m – 204.9 m. (Raulefs R. Del Peral-Rosado et al., Citation2018). Since the latest generation, 5G, is also developed towards an industrial radio system, the activities for positioning increased and the topic of precise positioning towards sub-meter accuracy was introduced. In addition, the trend towards frequencies above 6 GHz and the millimeter-wave range (30 to 300 GHz) for high data rates and ultra-low latency result in a small cell/ femto cell infrastructure that improves line of sight for positioning purposes (Aboubacar et al., Citation2020; Al-Turjman et al., Citation2019; Laoudias et al., Citation2018c; Slezak et al., Citation2018). Detailed information can be found in Section V.
4. Localization in automotive production
The variety and customer demands for cheap but qualitative products enhance the need for manufacturers to optimize production (Yong et al., Citation2018). Therefore, manufacturing has become more automated, digitalized and complex with needed monitoring and optimization (Kusiak, Citation2018; Rácz-Szabó et al., Citation2020). One tool for realizing this is the usage of an RTLS. Especially in the automotive industry, production lines are filled with robots and complex machines. Combined with the increased connectivity provided by the Internet of Things, a wide range of use cases lead to an increased interest in positioning services (Faheem et al., Citation2019). Equipment like automated guided vehicles, sensors, track & trace systems and mobile robots are building the foundation of these cyber-physical systems (Ivanov et al., Citation2021). In this environment, the RTLS must have low costs, low power consumption, low maintenance expenses, and require a minimal amount of new infrastructure (Lauri et al., Citation2010). By realizing these goals, the link between industry 4.0 and lean manufacturing discussed by (Buer et al., Citation2018) can be achieved.
In this section, the requirements regarding the RTLS for the specific circumstances in the production of the automotive industry derived from multiple use cases will be presented. Following, an overview of the current state of the art of technologies used is provided.
4.1. Localization requirements
Due to the complexity and the amount of metal in automotive production, undesirable effects like radio wave reflections and shielded areas lead to inaccuracies in the localization process (Slovak et al., Citation2019). Additionally, the reliability of the systems used in production needs to be as close to 100 % as possible since a failure can lead to the stop of the production line. (Faheem et al., Citation2019; Klaithem & Kamel, Citation2011)address additional challenges being heterogeneity and diversity, network management and scalability, range of coverage, cost, energy efficiency, lack of standardization, handovers and security. To counter these problems, a reliable and accurate localization technology is needed.
The main requirements can therefore be split into the accuracy needed, reliability of the system, latency, the positioning update interval, user equipment (UE) speed and the needed battery lifetime for operation (3GPP, Citation2021a). The 3GPP collects requirements from the industry to discuss the specifications for 5G, which promises to solve many of the previously discussed challenges. A summary of common use cases can be seen in .
Table 3. Positioning performance requirements (3GPP, Citation2021b).
Most use cases need a horizontal accuracy of less than 1 m, with some requiring dm levels of positioning. More specified use cases, including position update frequencies and battery lifetime requirements, are currently under discussion for future Releases and summarized in . These are requirements that were collected from the industry in order to discuss changes to the specifications for 5G in future Releases.
Table 4. Use case specifications (3GPP, Citation2021a).
4.2. Current RTLS Technologies in industrial automotive production
Positioning systems have become very popular in recent years. GNSS, like GPS, is a well-known and widely used positioning technology for outdoor scenarios. The satellite signals, however, cannot penetrate indoor environments resulting in a lack of the needed LOS (Mata et al., (Citation2020). For this reason, various indoor positioning technologies have been developed. Currently, mainly Wi-Fi, BLE, UWB, and RFID are used for indoor positioning via radio frequencies (Barral et al., Citation2019; Chu et al., Citation2011; Halawa et al., Citation2020). The main differences are in additional hardware needed, large-scale infrastructure, additional costs, energy consumption, update rate, provided accuracy, level of standardization and range limitations (Siddhesh et al., Citation2016).
Wi-Fi fingerprinting is one of the most used techniques enabled by smartphones (Fard et al., Citation2015). Since Wi-Fi has become widely used in public and enterprise areas, the opportunity of exploiting the existing infrastructure is provided. This results in low additional costs. Using fingerprinting and RSS, however, only results in accuracies of approximately 1.2 m (Thuong et al., Citation2016) with an update rate every few seconds (Siddhesh et al., Citation2016). While Wi-Fi is globally standardized, it operates in unlicensed frequencies, which can cause interferences. This must be avoided in automotive production since the setup needs to be highly reliable. In addition, the power consumption of 216.71 mW per ping on average is higher compared to other technologies (Kim Geok et al., Citation2021).
BLE can be also used for indoor positioning and is more energy-efficient, with 0.367 mW on average and low costs (Sadowski & Spachos, Citation2018a). It needs additional hardware compared to Wi-Fi and can achieve accuracies of about 1.2 m (Thuong et al., Citation2016). The range can be extended to about 100 m with adjustments to the broadcast power (Jianyong et al., Citation2014). Same as Wi-Fi, it uses unlicensed frequencies of 2.4 GHz, which interferes with other technologies sharing the same frequency band (Byunghun et al., Citation2015).
UWB can achieve one of the highest accuracies with up to 15 cm due to the better filtering of the short pulse (1 ns) on a 500 MHz bandwidth. The short signal results in low energy consumption of 39 μW at 1 Mbps (Khajenasiri et al., Citation2015). Due to the frequency range of 3.1 GHz – 10.6 GHz, it also causes less interference with other technologies (Yildirim et al., Citation2009). The placement and synchronization of the anchors, however, have to be well planned and exact since it has a significant impact on the positioning accuracy (Huan-Bang et al., Citation2016; McElroy et al., Citation2014). This leads to extra infrastructure that is combined with high costs. Even though UWB is standardized in IEEE 802.15.4–2011 and the improved IEEE 802.15.4z, interoperability between vendors is not provided yet, which can lead to vendor lock-in and further increased costs. While organizations such as the UWB Alliance work on promoting interoperability, this is not yet provided (Sedlacek et al., Citation2019).
The last option mentioned is RFID. Especially passive RFID is a cheap possibility for implementation but has a limited range and is only applicable for static point location in small spaces (Chu et al., Citation2011). The working range is limited to 1–2 m on several frequency bands (125–134 kHz, 13.56 MHz or 865–960 MHz). Since the tag does not require a power source, battery life is not an issue with passive RFID. Active RFID tags operate on 433 MHz or 915 MHz frequency bands. The range extends to 10–100 m, and the price is higher than passive tags (Batistic & Tomic, Citation2018).
5. 5G positioning
5G is a global communication standard developed by the 3GPP. Since 5G can benefit from the economy of scale and increase in interoperability due to global standardization, – it is positioned to fill the gaps and disadvantages (mentioned in the sub-section before), -functioning as an indoor positioning system (Mata et al., (Citation2020). This is due to the characteristics of the 5G standard with possibilities of time and direction-based positioning as described in section III. Its broad bandwidth and small cell setup are a great pre-condition for accurate positioning. This section provides information on the general development of 5G by the 3GPP, 5G positioning and the timeline planned.
5.1. Development by the 3GPP – 5G
In order to use novel mobile communication technologies, they are standardized by telecommunications development organizations. Otherwise, it is not possible for providers to build systems that communicate with each other. This standardization takes place in two stages. First, an intergovernmental organization sets guidelines in the form of goals, KPIs and schedules. The ‘International Telecommunication Union’ (ITU) is the intergovernmental organization responsible for global telecommunications affairs, founded by the United Nations in 1865. It is responsible for issues involving telephone calls, satellites, and the internet . The ITU covers the general radio system aspects of international mobile telecommunications (IMT) systems, including 3G, 4G, 5G and future generations. It publishes requirements that telecommunications systems should meet in the future. These are, for example, IMT-2000 for 3G, IMT-advanced for 4G and currently IMT-2020 for 5G. It was agreed that if the requirements are met, then this standard can be called a new generation of mobile communications. A comparison of the requirements of IMT-advanced to IMT-2020 can be seen in on the left. Since the characteristics of a system with the requirements given in IMT-2020 can also be used increasingly for industrial purposes, the three areas – eMBB, mMTC and uRLLC – have been subdivided. (ITU, Citation2020)
Figure 8. Requirement overview of the IMT-2020.
The research and development of technical specifications are driven by politically and economically oriented standardization organizations. The ‘3rd Generation Partnership Project’ (3GPP) unites seven of these organizations (ARIB, ATIS, CCSA, ETSI, TSDSI, TTA, TTC). The technical specifications are published in so-called ‘Releases’. The ITU reviews these Releases after each publication. If they meet the previously set requirements, the products developed under the specifications can be labelled as 5G. An example of this process can be seen in the development of LTE and 4G. The original LTE did not achieve the IMT-advance requirements for 4G. Therefore, ‘LTE capable products’ and not ‘4G capable products’ were sold in the market. Only LTE-A achieved the 4G standard. However, LTE was already referred to as 4G among the general public. In October 2010, two years after the launch of LTE, organizations agreed to also refer to LTE as 4G to avoid confusion. (Cox, Citation2014)
An overview of the 3GPP’s Release schedule can be seen in . The most recently published Release 15 and 16 achieve the 5G requirements. A ‘Functional Freeze’ (the point in time when no more technical requirements may be changed) was dated for Release 16 with a three-month delay on 19 June 2020, due to the global pandemic. Release 17 was delayed by at least another six months and scheduled for a Functional Freeze in March 2022 and a Protocol Freeze, June 2022. This will be followed by further performance completions (3GPP, Citation2020a). After the initial publication of each Release, it takes manufacturers around 1–1.5 years to produce hardware that can be purchased.
Figure 9. Overview of 3GPP time planning according to (3GPP, Citation2020a).
5.2. Development by the 3GPP – 5G positioning
While positioning was only introduced in Release 15 rudimentarily, Release 16 first mentioned standardization requirements for precise positioning and established minimum performance targets for positioning.
Horizontal positioning error ≤ 50 m for 80 % of UEs.
Vertical positioning error < 5 m for 80 % of UEs.
End-to-end latency < 30 sec.
Other targets are based on requirements from commercial use cases. 3GPP study TR #38.855 listed the following targets in indoor and outdoor deployment scenarios, noting that no single positioning technology needs to meet all targets for every scenario (Keating et al., Citation2019):
Horizontal positioning error < 3 m for 80 % of UEs for indoor deployment scenarios.
Vertical positioning error < 3 m for 80 % of UEs for indoor deployment scenarios.
Horizontal positioning error < 10 m for 80 % of UEs for outdoor deployment scenarios.
Vertical positioning error < 3 m for 80 % of UEs for outdoor deployment scenarios.
End-to-end latency < 1s.
In Release 17, the topic of positioning is further specified and listed under the title ‘NR Positioning enhanced’ or under ‘high-accuracy positioning’ in the technical specification of service requirements for 5G systems. The enhanced positioning service area represents, for example, a factory site, a dense urban area, an area along a road or a railroad line, or a tunnel and includes both indoor and outdoor areas. (3GPP, Citation2020b)
Accordingly, 5G systems are intended to combine 3GPP location technologies with non-3GPP location technologies. This is to improve accuracy, availability of positioning services, reliability, decrease latency of positioning services, increase update rate of position-related data, and increase coverage. The requirements are divided into positioning service levels. A listing of these levels can be seen in . Service levels five and six are relevant for positioning in the context of vehicle production. They differ only in terms of latency. This list represents requirements that have been agreed upon with the 3GPP technical unit. However, this does not mean that all service levels are included in Release 17 in this way. It should also be noted that even if the requirements are standardized and can be implemented in theory, manufacturers do not have to implement them at all service levels. (3GPP, Citation2021c)
Table 5. Performance requirements for horizontal and vertical positioning service levels (3GPP, Citation2021c).
To achieve these requirements, an extensive analysis of different positioning methods was performed in (3GPP, Citation2019). The results show that time and angle-based methods show the greatest potential and that the following positioning techniques are recommended to be used.
DL-based positioning with DL-TDOA and DL-AOD measurements
UL-based positioning with UL-TDOA and UL-AOA measurements
DL- and UL-based positioning with RTT and E-CID
However, not only is research conducted by the 3GPP, but the industry and research institutes also perform studies. These are described in the following sub- section.
5.3. Current research on 5G positioning
As presented at the beginning of this section, 5G positioning is still under development. A lot of research is being conducted to analyze and improve the positioning capabilities. Early publications between 2015 and 2017 already mention the potential of 5G positioning. (Hakkarainen et al., Citation2015) already lists the potential of a future 5G ultra-dense small cell network and its opportunities to create advanced positioning systems. (Dammann et al., Citation2015) predict the possible accuracy to sub- meter level when a dense infrastructure setup of more than 1100 units per square kilometer are used for an outdoor environment. Furthermore, use cases such as assisted driving can benefit from a 5G positioning system along roads where simulated results achieve sub 30 cm accuracy for measurements ranging between 50 and 100 MHz (Jose A. Del Peral-Rosado et al., Citation2016). (Shahmansoori et al., Citation2017) go on to describe algorithms for position and rotation angle estimation.
More recent studies from (Dwivedi et al., (Citation2021) describe the standardized positioning architecture and simulates it with the improved Release 16 specific positioning signals and measurements. A simulation for outdoor scenarios results in an accuracy of a few meters. Here, also an indoor open office scenario is simulated with inter-site distances of 20 m. The simulation showed accuracies of down to 0.2 m for the frequency range 2 (FR2) of 28 GHz with ideal conditions. The authors concluded that 5G positioning is highly applicable to many different use cases. (Yi Wang et al., Citation2021) proposed improved TOA measurements by stitching the sounding reference signal in multiple bands by analyzing the Cramer-Rao bound of the TOA estimation. Their simulation showed improvements in positioning accuracies from 1,25 m to 0,3 m at 90 % reliability. (Bo Sun et al., Citation2021) studied 3D Positioning using 5G with a single Station and presented sub-meter accuracies for close-range positioning. (Sosnin et al., Citation2021) also simulated 5G positioning with a downlink angle of departure algorithm in the context of an industrial IoT use case. Results show sub-meter accuracies also at 90 % reliability. In (Schuldt et al., Citation2021) the authors want to achieve indoor positioning of 2–3 m standard deviation and a confidence level of 68 % by using 5G signals combined with sensors in smartphones. This will be tested in a 5G non-standalone campus network. (Yammine et al., Citation2021) investigate the 5G positioning performance using a mm-wave measurement setup. Using the bandwidth and beamforming characteristics, they provide numerical simulations of the positioning reference signal reception for real-world indoor environments. These resulted in ToA-based LOS accuracies of 6 cm. (Huang et al., Citation2021) used a fingerprinting approach with Kalman filtering and Universal Kriging algorithm and provided accuracies of a few meters (1.44 m for 80 % accuracy and ~3 m for 99.9 %). Also, using a fingerprinting algorithm (Yuexi Zhang et al., Citation2021a) achieved accuracies of up to 30 cm.
In conclusion, researchers agree that 5G positioning shows high potential. However, many of the presented tests above have been conducted as simulations. Practical tests are not common practice yet. First setups in controlled research environments were tested by the semiconductor producer Qualcomm Technologies Inc. The test was performed in an open space with a 400 MHz Bandwidth around 6.225GHz with 4 × 4 MIMO directional antennas using DL-OTDOA. Accuracy compared to the measured ground truth was 0.2 m for vertical and horizontal measurements in a controlled environment in the size of 3.6 m x 4.9 m (Qualcomm Technologies Inc, Citation2020; Zhang, Citation2021). Another test site uses 6 antennas with 100 MHz bandwidth at 3,75GHz and an inertial sensor in the target device to complement positioning accuracy. With this setup, 30 cm is achieved with UL-TDOA (Qualcomm Technologies Inc, Citation2021). The Fraunhofer IIS in Erlangen Germany also has a 5G testbed for positioning. They determine that the theoretical accuracy of 20 cm using DL-TDOA combined with machine learning in FR1 with 100 MHz bandwidth between 3.7 GHz and 3.8 GHz as open RAN (Radio Access Network) for industrial application is realistic. However, it is marked as an evolving process starting with lower accuracy (Kasparek et al., Citation2021). In February 2020, the producer of telecommunications equipment Huawei Technologies Co., Ltd. published a press release regarding their radio coverage solution for industrial indoor deployment called LampSite EE (Enterprise Edition). It is claimed to achieve meter-level positioning accuracy through multipath enhancement. It is further stated that with the continuous evolution of technologies such as 5G large-bandwidth measurements, a sub-meter-level accuracy can be achieved (Huawei Technologies Co., Ltd, Citation2020).
6. Conclusion
The RTLS is an crucial tool in the automotive production industry due to its increased transparency, automation, and process control. Historically, radio frequency positioning was based on technologies and standards, each coming with its own disadvantages. Examples entail high costs for proprietary infrastructures (e.g. UWB), low accuracies (Wi-Fi or BLE), or short operational distances (RFID). This contribution aimed to determine the state of the art of the new mobile standard 5G as a positioning system and its prospects of being used in automotive production. Results show that it promises great potential with high accuracy and global standardization in comparison to the complex requirements. 5G is actively being developed towards an industrial solution with a dedicated focus on positioning capabilities. However, it is clear the development is in its early stages. Accuracies of less than 1 m are only being standardized for 5G Releases with hardware commonly available after 2023. The requirements from the industry are high, extending the needed precise accuracies with long battery lives, low latency, and robust systems with high availability for critical production processes. Therefore, the maturity of 5G positioning is not yet given for industrial usage. The current capabilities do not meet these requirements. They are, however, actively being integrated into the standardization process of 5G – but the specifications are currently being studied and exist mainly in theory. Practical RTLS pilots using 5G as a local positioning source are only starting to be tested in controlled environments. Due to the potential, future research should focus on implementing the standard into practical tests in order to verify the characteristics in complex scenarios and develop the technology to be ready for usage in the automotive production industry.
Geolocation Information
The literature review was conducted in Munich, Germany and Cottbus, Germany.
Acknowledgments
Gratefully acknowledged is the funding of the Ph.D. thesis and research of Christoph Küpper by the BMW Group. The authors would like to thank their colleagues and supervisors for their assistance and support during this research.
Disclosure statement
No potential conflict of interest was reported by the author(s).
Data Availability Statement
Due to the nature of a literature review, no data was generated, collected, or used for the analysis of this publication. All references can be found below. Therefore, no data exists that can be made public.
References
- 3GPP. 2001. “TR 25.847: UE positioning enhancements: Technical specification group radio access network.” Accessed April 27, 2021. https://www.3gpp.org/ftp/Specs/archive/25_series/25.847/25847-400.zip.
- 3GPP. (2019). TR 38.855 V16.0.0 (2019-03): Study on NR positioning support: Technical specification group radio access network. Retrieved April 30, 2021. https://www.3gpp.org/ftp//Specs/archive/38_series/38.855/38855-g00.zip
- 3GPP. 2020a. “Release 17 timeline agreed.” Accessed April 26, 2021. https://www.3gpp.org/news-events/2145-rel-17_newtimeline.
- 3GPP. (2020b). TR 21.916 V1.0.0 (2020-12) - release 16 description: Technical specification group services and system aspects. https://portal.3gpp.org/desktopmodules/Specifications/SpecificationDetails.aspx?specificationId=3493
- 3GPP. 2021a. “S1-210175: Requirements for low power highly accurate positioning.” Accessed April 26, 2021. Requirements for low power highly accurate positioning.
- 3GPP. 2021b. “TS 22.104 V17.5.0 (2021-03): Service requirements for cyber-physical control applications in vertical domains: Technical specification group services and system aspects.” Accessed April 26, 2021. https://www.3gpp.org/ftp/Specs/archive/22_series/22.104/22104-h50.zip.
- 3GPP. 2021c. “TS 22.261 V17.6.0 (2021-03): Service requirements for the 5G system: Technical specification group services and system aspects.” Accessed April 26, 2021. https://www.3gpp.org/ftp/Specs/archive/22_series/22.261/22261-h60.zip.
- 3GPP. (2021d). TS 22.261 V18.2.0 (2021-03): Technical specification group services and system aspects: service requirements for the 5G system - Rel. 18. https://portal.3gpp.org/desktopmodules/Specifications/SpecificationDetails.aspx?specificationId=3107
- Aboubacar, M., Ayadi, J., Jimenez, V. P. G., & Consoli, A. (2020). MmWave massive MIMO small cells for 5G and beyond mobile networks: An overview. 12th International Symposium on Communication Systems, Networks and Digital Signal Processing (CSNDSP), (12), 1–6. https://doi.org/10.1109/CSNDSP49049.2020.9249602
- Ahasanun, N., Adhikari, B., Hussain, F., & Fernando, X. N. (2020). A survey of machine learning for indoor positioning. IEEE Access, 8, 214945–214965. https://doi.org/10.1109/ACCESS.2020.3039271
- Al-Kadi, R., & Zorn, C. (2020). Ultra Wideband - Marktpotenziale und Funktionsweise. ATZ Elektron, 15(3), 44–49. https://doi.org/10.1007/s35658-020-0163-9
- Al-Turjman, F., Ever, E., & Zahmatkesh, H. (2019). Small cells in the forthcoming 5G/IoT: Traffic modelling and deployment overview. IEEE Commun. Surv. Tutorials, 21(1), 28–65. https://doi.org/10.1109/COMST.2018.2864779
- Bakri, M. Q., Ismail, A. H., Hashim, M. S. M., Muhamad Azmi, M. S., Safar, M. J. A., & Marhaban, M. H. (2020). Design and development of a service robot for Wi-Fi RSSI fingerprint data collection. IOP Conference Series: Materials Science and Engineering, 920(1), 12003. https://doi.org/10.1088/1757-899X/920/1/012003
- Barral, V., Suárez-Casal, P., Escudero, C. J., & García-Naya, J. A. (2019). Multi-sensor accurate forklift location and tracking simulation in industrial indoor environments. Electronics, 8(10), 1152. https://doi.org/10.3390/electronics8101152
- Batistic, L., & Tomic, M. (2018). Overview of indoor positioning system technologies. Society for Information and Communication Technology, Electronics and Microelectronics - MIPRO, 473–478. https://doi.org/10.23919/MIPRO.2018.8400090
- Ben-Daya, M., Hassini, E., & Bahroun, Z. (2019). Internet of things and supply chain management: A literature review. International Journal of Production Research, 57(15–16), 4719–4742. https://doi.org/10.1080/00207543.2017.1402140
- Bharadwaj, R., Parini, C., & Alomainy, A. (2015). Experimental investigation of 3-D human body localization using wearable Ultra-wideband antennas. IEEE Trans. Antennas Propagat, 63(11), 5035–5044. https://doi.org/10.1109/TAP.2015.2478455
- Blasio, G. D., Quesada-Arencibia, A., Garcia, C. R., Rodriguez-Rodriguez, J. C., & Moreno-Diaz, R. (2018). A protocol-channel-based indoor positioning performance study for Bluetooth low energy. IEEE Access, 6, 33440–33450. https://doi.org/10.1109/ACCESS.2018.2837497
- Buer, S.-V., Strandhagen, J. O., & Chan, F. T. S. (2018). The link between Industry 4.0 and lean manufacturing: Mapping current research and establishing a research agenda. International Journal of Production Research, 56(8), 2924–2940. https://doi.org/10.1080/00207543.2018.1442945
- Byunghun, K., Kwak, M., Lee, J., & Kwon, T. T. 2015. “A multi-pronged approach for indoor positioning with WiFi, magnetic and cellular signals.” International Conference on Indoor Positioning and Indoor Navigation (IPIN), Busan, Korea (South) (IEEE), 723–726. https://doi.org/10.1109/IPIN.2014.7275551.
- Chen, S. W., Seow, C. K., & Tan, S. Y. (2016). Elliptical lagrange-based NLOS tracking localization scheme. IEEE Transactions on Wireless Communications, 15(5), 3212–3225. https://doi.org/10.1109/TWC.2016.2518174
- Chen, H., Zhang, Y., Wei, L., Tao, X., & Zhang, P. (2017). ConFi: Convolutional neural networks based indoor Wi-Fi localization using channel state information. IEEE Access, 5, 18066–18074. https://doi.org/10.1109/ACCESS.2017.2749516
- Chon, H. D., Jun, S., Jung, H., & Won, A. (2004). Using RFID for Accurate Positioning. Journal of Global Positioning Systems, 3(1&2), 32–39. https://doi.org/10.5081/jgps.3.1.32
- Chowdhury, T. I., Rahman, M. M., Sadre-Ala Parvez, A. K. M. M. A., Basher, A., Alam, A., & Rizwan, S. 2015. “A multi-step approach for RSSi-based distance estimation using smartphones.” International Conference on Networking Systems and Security (NSysS) (IEEE), 1–5. https://doi.org/10.1109/NSysS.2015.7042942.
- Christ, R., & Lavigne, R. 2000. “Radio frequency-based personnel location systems.” 34th Annual International Carnahan Conference on Security Technology, Ottawa, ON, Canada (IEEE), 141–150. https://doi.org/10.1109/CCST.2000.891180.
- Chu, C.-H., Wang, C.-H., Liang, C.-K., Ouyang, W., Cai, J.-H., & Chen, Y.-H. 2011. “High-Accuracy Indoor personnel tracking system with a ZigBee wireless sensor network.” Seventh International Conference on Mobile Ad-hoc and Sensor Networks, Beijing, China (IEEE), 398–402. https://doi.org/10.1109/MSN.2011.36.
- Cidronali, A., Maddio, S., Giorgetti, G., & Manes, G. (2010). Analysis and performance of a smart antenna for 2.45-GHz single-anchor indoor positioning. IEEE Transactions on Microwave Theory and Techniques, 58(1), 21–31. https://doi.org/10.1109/TMTT.2009.2035947
- Cox, C. I. (2014). An Introduction to LTE LTE, LTE-Advanced, SAE. In VoLTE and 4G Mobile Communications. John Wiley & Sons Inc, 488 .
- Dammann, A., Raulefs, R., & Zhang, S. 2015. “On prospects of positioning in 5G.” IEEE International Conference on Communication Workshop (ICCW), London, UK (IEEE), 1207–1213. https://doi.org/10.1109/ICCW.2015.7247342.
- Del Peral-Rosado, J. A., Lopez-Salcedo, J. A., Kim, S., & Seco-Granados, G. 2016. “Feasibility study of 5G-based localization for assisted driving.” International Conference on Localization and GNSS (ICL-GNSS), Barcelona (IEEE), 1–6. https://doi.org/10.1109/ICL-GNSS.2016.7533837.
- Del Peral-Rosado, R. R., Lopez-Salcedo, J. A., Seco-Granados, G., & Del Peral-Rosado, J. A. (2018). Survey of cellular mobile radio localization methods: From 1G to 5G. IEEE Communications Surveys & Tutorials, 20(2), 1124–1148. https://doi.org/10.1109/COMST.2017.2785181
- Dougherty, J. J., El-Sherief, H., Simon, D. J., & Whitmer, G. A. (1995). GPS modeling for designing aerospace vehicle navigation systems. IEEE Transactions on Aerospace and Electronic Systems, 31(2), 695–705. https://doi.org/10.1109/7.381917
- Dwivedi, S., Shreevastav, R., Munier, F., Nygren, J., Siomina, I., Lyazidi, Y., Shrestha, D., Lindmark, G., Ernström, P., Razavi, S., Muruganathan, S., Masini, G., Busin, A., Gunnarsson, F. (2021). “Positioning in 5G networks.” Cornell UZniversity, 1–7. https://arxiv.org/abs/2102.03361v1. Accessed April 30, 2021.
- Elsanhoury, M., Makela, P., Koljonen, J., Valisuo, P., Shamsuzzoha, A., Mantere, T., Elmusrati, M., & Kuusniemi, H. (2022). Precision positioning for smart logistics using ultra-wideband technology-based indoor navigation: A review. IEEE Access, 10, 44413–44445. https://doi.org/10.1109/ACCESS.2022.3169267
- Faheem, Z., Gkelias, A., & Leung, K. K. (2019). A survey of indoor localization systems and technologies. IEEE Communications Surveys & Tutorials, 21(3), 2568–2599. https://doi.org/10.1109/COMST.2019.2911558
- Fard, H. K., Chen, Y., & Son, K. K. 2015. “Indoor positioning of mobile devices with agile iBeacon deployment.” Canadian Conference on Electrical and Computer Engineering (CCECE), Halifax, NS, Canada (IEEE), 275–279. https://doi.org/10.1109/CCECE.2015.7129199.
- FCC. 1996. “Report & order and further notice of proposed rulemaking on revision of the FCC rules to ensure compatibility with enhanced 911 emergency calling systems.” Accessed April 27, 2021. https://docs.fcc.gov/public/attachments/DA-02-2423A1.pdf.
- Fei, H., Xiao, F., Sheng, B., Huang, H., & Sun, L. (2019). Motion path reconstruction in indoor environment using commodity Wi-Fi. IEEE Transactions on Vehicular Technology, 68(8), 7668–7678. https://doi.org/10.1109/tvt.2019.2921408
- Feng, Z., Lingfei, M., & Meng, L. 2015. “Analysis of low energy consumption wireless sensor with BLE.” IEEE SENSORS, Busan, Korea (South) (IEEE), 1–4. https://doi.org/10.1109/ICSENS.2015.7370563.
- Füchtenhans, M., Grosse, E. H., & Glock, C. H. (2021). Smart lighting systems: State-of-the-art and potential applications in warehouse order picking. International Journal of Production Research, 59(12), 3817–3839. https://doi.org/10.1080/00207543.2021.1897177
- Gezici, S., & Poor, H. V. (2009). Position estimation via ultra-wide-band signals. Proceedings of the IEEE, 97(2), 386–403. https://doi.org/10.1109/JPROC.2008.2008840
- Gezici, S., Zhi Tian, G. B. G., F. Molisch, A., Molisch, A. F., Poor, H. V., Sahinoglu, Z., & Sahinoglu, Z. (2005). Localization via ultra-wideband radios: A look at positioning aspects for future sensor networks. IEEE Signal Processing Magazine, 22(4), 70–84. https://doi.org/10.1109/MSP.2005.1458289
- Giovanni, P., Arena, F., Gebremariam, Y. E., & You, I. (2021). Bluetooth 5.1: An analysis of direction finding capability for high-precision location services. Sensors (Basel, Switzerland), 21(11). https://doi.org/10.3390/s21113589
- Guo, G., Chen, R., Feng, Y., Peng, X., Liu, Z., & Pan, Y. (2019). Indoor smartphone localization: A hybrid Wifi RTT-RSS ranging approach. IEEE Access, 7, 176767–176781. https://doi.org/10.1109/ACCESS.2019.2957753
- Guoquan, L., Geng, E., Zhouyang, Y., Yongjun, X., & Zhu, H. 2018. “An indoor positioning algorithm based on RSSI real-time correction.” International Conference on Signal Processing (ICSP), Beijing, China (IEEE), 129–133. https://doi.org/10.1109/ICSP.2018.8652382.
- Guo, D., Zhong, R. Y., Ling, S., Rong, Y., & Huang, G. Q. (2020). A roadmap for assembly 4.0: Self-configuration of fixed-position assembly islands under graduation intelligent manufacturing system. International Journal of Production Research, 58(15), 4631–4646. https://doi.org/10.1080/00207543.2020.1762944
- Hakkarainen, A., Werner, J., Costa, M., Leppanen, K., & Valkama, M. 2015. “High-efficiency device localization in 5G ultra-dense networks: Prospects and Enabling Technologies.” IEEE 82nd Vehicular Technology Conference (VTC2015-Fall), Boston, MA, USA (IEEE), 1–5. https://doi.org/10.1109/VTCFall.2015.7390965.
- Halawa, F., Dauod, H., Lee, I. G., Yinglei, L., Yoon, S. W., & Chung, S. H. (2020). Introduction of a real time location system to enhance the warehouse safety and operational efficiency. International Journal of Production Economics, 224(5), 107541. https://doi.org/10.1016/j.ijpe.2019.107541
- Hanssens, B., Plets, D., Tanghe, E., Oestges, C., Gaillot, D. P., Lienard, M., Taoyong, L., Steendam, H., Martens, L., & Joseph, W. (2018). An indoor variance-based localization technique utilizing the UWB estimation of geometrical propagation parameters. IEEE Transactions on Antennas and Propagation, 66(5), 2522–2533. https://doi.org/10.1109/TAP.2018.2810340
- He, D., Bouras, T., Chen, X., Wenxian, Y., Zhang, Y., & Yang, Y. (2018). 3-D spatial spectrum fusion indoor localization algorithm based on CSI-UCA smoothing technique. IEEE Access, 6, 59575–59588. https://doi.org/10.1109/ACCESS.2018.2873686
- Henk, W., Lien, J., & Win, M. Z. (2009). Cooperative localization in wireless networks. Proceedings of the IEEE, 97(2), 427–450. https://doi.org/10.1109/JPROC.2008.2008853
- Hernandez, A., Badorrey, R., Choliz, J., Alastruey, I., & Valdovinos, A. (2008). Accurate indoor wireless location with IR UWB systems a performance evaluation of joint receiver structures and TOA based mechanism. IEEE Transactions on Consumer Electronics, 54(2), 381–389. https://doi.org/10.1109/TCE.2008.4560103
- Hilty, L. M., Oertel, B., Wölk, M., & Pärli, K. (2012). “Lokalisiert und identifiziert. Wie Ortungstechnologien unser Leben verändern.”. https://doi.org/10.3218/3477-6
- Huan-Bang, L., Miura, R., & Kagawa, T. (2016). Tracking of warehouse forklifts using an indoor positioning system based on ir-uwb. National Institute of Information and Communications Technology (NICT), 1–4. https://www.semanticscholar.org/paper/Tracking-of-Warehouse-Forklifts-Using-an-Indoor-on-Li-Miura/27977b023abce26f4977a149a18c73978b42e858.
- Huang, S., Zhao, K., Zheng, Z., Wenqing, J., Tianyi, L., Liao, X., & Sun, J. (2021). An optimized fingerprinting-based indoor positioning with Kalman filter and universal kriging for 5G internet of things. Wireless Communications and Mobile Computing, 2021, 1–10. https://doi.org/10.1155/2021/9936706
- Huawei Technologies Co., Ltd. 2020. “Huawei launches LAMPSITE EE (Enterprise Edition), a 5G indoor coverage solution for industry scenarios.” News release. February 21. Accessed April 30, 2021. https://www.huawei.com/cn/news/2020/2/5g-lampsite-ee-2020.
- Ilie-Zudor, E., Kemény, Z., Pfeiffer, A., & Monostori, L. (2016). Decision support solutions for factory and network logistics operations. International Journal of Computer Integrated Manufacturing, 7(1), 1–11. https://doi.org/10.1080/0951192X.2016.1145801
- ITU. 2020. “International Telecommunication Union.” Accessed April 26, 2021. https://www.itu.int/en/about/Pages/default.aspx.
- Ivanov, D., Das, A., & Choi, T.-M. (2018). New flexibility drivers for manufacturing, supply chain and service operations. International Journal of Production Research, 56(10), 3359–3368. https://doi.org/10.1080/00207543.2018.1457813
- Ivanov, D., Tang, C. S., Dolgui, A., Battini, D., & Das, A. (2021). Researchers’ perspectives on Industry 4.0: Multi-disciplinary analysis and opportunities for operations management. International Journal of Production Research, 59(7), 2055–2078. https://doi.org/10.1080/00207543.2020.1798035
- Jackson, J., Davis, B., & Gebre-Egziabher, D. (2018). A performance assessment of low-cost RTK GNSS receivers (IEEE) (pp. 642–649). https://doi.org/10.1109/PLANS.2018.8373438
- Jaffe, A., & Wax, M. (2014). Single-site localization via maximum discrimination multipath fingerprinting. IEEE Transactions on Signal Processing, 62(7), 1718–1728. https://doi.org/10.1109/TSP.2014.2304923
- Jiang, T., Zhang, J., Tang, P., Tian, L., Zheng, Y., Dou, J., Asplund, H., Raschkowski, L., D’Errico, R., & Jamsa, T. (2021). 3GPP standardized 5G channel model for IIoT scenarios: A survey. IEEE Internet of Things Journal, 8(11), 8799–8815. https://doi.org/10.1109/JIOT.2020.3048992
- Jiang, X., Zhou, Z., Youwen, Y., & Ni, L. M. (2016). A survey on wireless indoor localization from the device perspective. ACM Computing Surveys, 49(2), 1–31. https://doi.org/10.1145/2933232
- Jianyong, Z., Haiyong, L., Zili, C., & Zhaohui, L. 2014. “RSSI based Bluetooth low energy indoor positioning.” International Conference on Indoor Positioning and Indoor Navigation (IPIN), Busan (IEEE), 526–533. https://doi.org/10.1109/IPIN.2014.7275525.
- Kasparek, M., Mutschler, C., & Seitz, J. 2021. “5G for connecting and locating mobile devices: 5G-ACIA demo session, Hannover Messe .” April 14. Accessed April 30, 2021. https://www.hannovermesse.de/veranstaltung/5g-acia-demo-session-5g-for-connecting-and-locating-mobile-devices/ld/98601.
- Keating, R., Saily, M., Hulkkonen, J., & Karjalainen, J. 2019. “Overview of positioning in 5G new radio.” International Symposium on Wireless Communication Systems (ISWCS), Oulu, Finland (IEEE), 320–324. https://doi.org/10.1109/ISWCS.2019.8877160.
- Khajenasiri, I., Zhu, P., Verhelst, M., & Gielen, G. (2015). A low-energy ultra-wideband internet-of-Things radio system for multi-standard smart-home energy management. IEIE Transactions on Smart Processing and Computing, 4(5), 354–365. https://doi.org/10.5573/IEIESPC.2015.4.5.354
- Kim Geok, T., Zar Aung, K., Sandar Aung, M., Thu Soe, M., Abdaziz, A., Pao Liew, C., Hossain, F., Tso, C. P., & Yong, W. H. (2021). Review of indoor positioning: Radio wave technology. Applied Sciences, 11(1), 279. https://doi.org/10.3390/app11010279
- Klaithem, A. N., & Kamel, H. 2011. “A survey of indoor positioning systems and algorithms.” 2011 International Conference on Innovations in Information Technology, Abu Dhabi, United Arab Emirates (IEEE), 185–190. https://doi.org/10.1109/INNOVATIONS.2011.5893813.
- Kraus, S., Breier, M., & Dasí-Rodríguez, S. (2020). The art of crafting a systematic literature review in entrepreneurship research. International Entrepreneurship and Management Journal, 16(3), 1023–1042. https://doi.org/10.1007/s11365-020-00635-4
- Krzywdzinski, M. (2019). Globalisation, decarbonisation and technological change: Challenges for the German and CEE Automotive Supplier Industry. In B. Galgóczi (Ed.), Towards a just transition: Coal, cars and the world of work (pp. 215–241). ETUI European Trade Union Institute.
- Kumar, S., Gil, S., Katabi, D., & Rus, D. 2014. “Accurate indoor localization with zero start-up cost.” Proceedings of the 20th annual international conference on Mobile computing and networking, New York, NY, United States (Association for Computing Machinery), 483–494. https://doi.org/10.1145/2639108.2639142.
- Kusiak, A. (2018). Smart manufacturing. International Journal of Production Research, 56(1–2), 508–517. https://doi.org/10.1080/00207543.2017.1351644
- Kyamakya, K., & Jobmann, K. (2005). Location management in cellular networks: classification of the most important paradigms, realistic simulation framework, and relative performance analysis. IEEE Transactions on Vehicular Technology, 54(2), 687–708. https://doi.org/10.1109/TVT.2004.842459
- Laoudias, C., Moreira, A., Kim, S., Lee, S., Wirola, L., & Fischione, C. (2018a). A survey of enabling technologies for network localization, tracking, and navigation. IEEE Communications Surveys & Tutorials, 20(4), 3607–3644. https://doi.org/10.1109/COMST.2018.2855063
- Laoudias, C., Moreira, A., Kim, S., Lee, S., Wirola, L., & Fischione, C. (2018b). A survey of enabling technologies for network localization, tracking, and navigation. IEEE Communications Surveys & Tutorials, 20(4), 3607–3644. https://doi.org/10.1109/COMST.2018.2855063
- Laoudias, C., Moreira, A., Kim, S., Lee, S., Wirola, L., & Fischione, C. (2018c). A survey of enabling technologies for network localization, tracking, and navigation. IEEE Communications Surveys & Tutorials, 20(4), 3607–3644. https://doi.org/10.1109/COMST.2018.2855063
- Lauri, W., Laine, T. A., & Syrjarinne, J. 2010. “Mass-market requirements for indoor positioning and indoor navigation.” International Conference on Indoor Positioning and Indoor Navigation, Zurich, Switzerland (IEEE), 1–7. https://doi.org/10.1109/IPIN.2010.5646748
- Lee, J., Hsu, H.-H., & Ying-Ern, H. (2019). Scalable package-level RFI filter for digital clock noise mitigation in 5-GHz and future 6-GHz WiFi applications, (New Orleans, LA, USA: IEEE) (pp. 427–431). https://doi.org/10.1109/ISEMC.2019.8825285
- Li, D., Lei, Y., & Zhang, H. (2020). A novel outdoor positioning technique using LTE network fingerprints. Sensors (Basel, Switzerland), 20(6). https://doi.org/10.3390/s20061691
- Liu, H., Darabi, H., Banerjee, P., & Liu, J. (2007a). Survey of wireless indoor positioning techniques and systems. IEEE Transactions on Systems, Man and Cybernetics, Part C (Applications and Reviews), 37(6), 1067–1080. https://doi.org/10.1109/TSMCC.2007.905750
- Liu, H., Darabi, H., Banerjee, P., & Liu, J. (2007b). Survey of wireless indoor positioning techniques and systems. IEEE Transactions on Systems, Man and Cybernetics, Part C (Applications and Reviews), 37(6), 1067–1080. https://doi.org/10.1109/TSMCC.2007.905750
- Liu, D.-Y., Wang, C.-S., & Hsu, K.-S. 2016. “Beacon applications in information services.” International Conference on Advanced Materials for Science and Engineering (ICAMSE), Tainan, Taiwan (IEEE), 438–440. https://doi.org/10.1109/ICAMSE.2016.7840318.
- Löcklin, A., Przybysz-Herz, K., Ruppert, T., Libert, R., Jakab, L., Jazdi, N., & Weyrich, M. (2021). Tailored digitization with real-time locating systems. atp, 63(3), 76–83. https://doi.org/10.17560/atp.v63i03.2550
- Maghdid, H. S., Lami, I. A., Ghafoor, K. Z., & Lloret, J. (2016). Seamless outdoors-indoors localization solutions on smartphones. ACM Computing Surveys, 48(4), 1–34. https://doi.org/10.1145/2871166
- Mahfouz, M. R., Cemin Zhang, B. C. M., Kuhn, M. J., Fathy, A. E., & Fathy, A. E. (2008). Investigation of high-accuracy indoor 3-D positioning using UWB technology. IEEE Transactions on Microwave Theory and Techniques, 56(6), 1316–1330. https://doi.org/10.1109/TMTT.2008.923351
- Martinez, S., Mariño, A., Sanchez, S., Montes, A. M., Triana, J. M., Barbieri, G., Abolghasem, S., Vera, J., & Guevara, M. (2021). A digital twin demonstrator to enable flexible manufacturing with robotics: A process supervision case study. Production & Manufacturing Research, 9(1), 140–156. https://doi.org/10.1080/21693277.2021.1964405
- Mata, F. J., Grec, F., Azaola, M., Blázquez, F., Fernández, A., Dominguez, E., Cueto-Felgueroso, G., Seco-Granados, G., del Peral-Rosado, J.A., Staudinger, E., Gentner, C., Kasparek, M., Backert, C., Barlett, D., Serna, E., Ries, L., Prieto-Cerdeira, R. (2020). “Preliminary field trials and simulations results on performance of hybrid positioning based on GNSS and 5G signals.” International Technical Meeting of the Satellite Division of The Institute of Navigation Colorado, USA, 387–401. https://doi.org/10.33012/2020.17609.
- McElroy, C., Neirynck, D., & McLaughlin, M. 2014. “Comparison of wireless clock synchronization algorithms for indoor location systems.” International Conference on Communications Workshops (ICC), Sydney, NSW, Australia (IEEE), 157–162. https://doi.org/10.1109/ICCW.2014.6881189.
- Minseuk, K., Han, D., & Rhee, J.-K.-K. (2020). Machine learning for practical localization system using multiview CSI. IEEE Access, 8, 184575–184584. https://doi.org/10.1109/ACCESS.2020.3029598
- Nardo, M., Forino, D., & Murino, T. (2020). The evolution of man–machine interaction: The role of human in Industry 4.0 paradigm. Production & Manufacturing Research, 8(1), 20–34. https://doi.org/10.1080/21693277.2020.1737592
- Nasir, S., Nam, H., Al-Naffouri, T. Y., & Alouini, M.-S. (2019). A state-of-the-art survey on multidimensional scaling-based localization techniques. IEEE Communications Surveys & Tutorials, 21(4), 3565–3583. https://doi.org/10.1109/COMST.2019.2921972
- Ning, D., Wagner, D., Chen, X., Abhinav Pathak, Y. C. H., Rice, A., & Rice, A. (2013). Characterizing and modeling the impact of wireless signal strength on smartphone battery drain. SIGMETRICS Perform. Eval. Rev, 41(1), 29–40. https://doi.org/10.1145/2494232.2466586
- Ojas, K., & Rappaport, T. S. (2021). Position location for futuristic cellular communications: 5G and beyond. IEEE Communications Magazine, 59(1), 70–75. https://doi.org/10.1109/MCOM.001.2000150
- Parkash, D., Kundu, T., & Kaur, P. (2012). The RFID technology and its applications: A review. International Journal of Electronics, Communication & Instrumentation Engineering Research and Development (IJECIERD, 2, 109–120. https://www.researchgate.net/publication/232575248.
- Posluk, M., Ahlander, J., Shrestha, D., Razavi, S. M., Lindmark, G., & Gunnarsson, F. (2021). 5G deployment strategies for high positioning accuracy in indoor environments. arXiv. https://doi.org/10.48550/arXiv.2105.09584
- Qualcomm Technologies Inc. 2020. “Transforming enterprise and industry with 5G private networks.” Accessed April 30, 2021. https://www.qualcomm.com/media/documents/files/the-role-of-5g-in-private-networks-for-industrial-iot.pdf.
- Qualcomm Technologies Inc. 2021. “5G industrial precise positioning.” Accessed August 25, 2021. https://www.youtube.com/watch?v=6PlR7kYNXrs.
- Rácz-Szabó, A., Ruppert, T., Bántay, L., Löcklin, A., Jakab, L., & Abonyi, J. (2020). Real-time locating system in production management. Sensors (Basel, Switzerland), 20(23), 6766. https://doi.org/10.3390/s20236766
- Ramos, A., Lazaro, A., & Villarino, R. (2016). RFID and wireless sensors using ultra-wideband technology ,(ISTE Press Ltd.). https://doi.org/10.1016/C2015-0-01232-1
- Ren, J., Wang, Y., Niu, C., & Song, W. (2019a). A novel high precision and low consumption indoor positioning algorithm for internet of things. IEEE Access, 7, 86874–86883. https://doi.org/10.1109/ACCESS.2019.2924992
- Ren, J., Wang, Y., Niu, C., Song, W., & Huang, S. (2019b). A novel clustering algorithm for Wi-Fi indoor positioning. IEEE Access, 7, 122428–122434. https://doi.org/10.1109/ACCESS.2019.2937464
- Rong, P., & Sichitiu, M. L. 2006. “Angle of arrival localization for wireless sensor networks.” 3rd Annual IEEE Communications Society on Sensor and Ad Hoc Communications and Networks, Reston, VA, USA (IEEE), 374–382. https://doi.org/10.1109/SAHCN.2006.288442.
- Rusli, M. E., Ali, M., Jamil, N., & Din, M. M. 2016. “An improved indoor positioning algorithm based on RSSI-trilateration technique for internet of things (IOT).” International Conference on Computer and Communication Engineering (ICCCE), Kuala Lumpur, Malaysia (IEEE), 72–77. https://doi.org/10.1109/ICCCE.2016.28.
- Sadowski, S., & Spachos, P. (2018a). RSSI-based indoor localization with the internet of things. IEEE Access, 6, 30149–30161. https://doi.org/10.1109/ACCESS.2018.2843325
- Sadowski, S., & Spachos, P. (2018b). RSSI-based indoor localization with the internet of things. IEEE Access, 6, 30149–30161. https://doi.org/10.1109/ACCESS.2018.2843325
- Schuldt, C., Shoushtari, H., Hellweg, N., & Sternberg, H. (2021). L5IN: Overview of an indoor navigation pilot project. Remote Sensing, 13(4), 624. https://doi.org/10.3390/rs13040624
- Sedlacek, P., Slanina, M., & Masek, P. 2019. “An overview of the IEEE 802.15.4z standard its comparison and to the existing UWB standards.” International Conference Radioelektronika (RADIOELEKTRONIKA), Pardubice, Czech Republic (IEEE), 1–6. https://doi.org/10.1109/RADIOELEK.2019.8733537.
- Shahmansoori, A., Garcia, G. E., Destino, G., Seco-Granados, G., & Wymeersch, H. (2017). Position and orientation estimation through millimeter-wave MIMO in 5G systems. IEEE Transactions on Wireless Communications, 17(3), 1822–1835. https://doi.org/10.1109/TWC.2017.2785788
- Shen, J., & Molisch, A. F. 2011. “Passive location estimation using TOA measurements.” 2011 IEEE International Conference on Ultra-Wideband (ICUWB), Bologna, Italy (IEEE), 253–257. https://doi.org/10.1109/ICUWB.2011.6058839.
- Shi, G., & Ming, Y. (2016). Survey of indoor positioning systems based on ultra-wideband (UWB) technology. 348, 1269–1278. https://doi.org/10.1007/978-81-322-2580-5_115
- Shi, S., Sigg, S., Chen, L., & Yusheng, J. (2018). Accurate location tracking from CSI-based passive device-free probabilistic fingerprinting. IEEE Transactions on Vehicular Technology, 67(6), 5217–5230. https://doi.org/10.1109/TVT.2018.2810307
- Siddhesh, D., Bakal, J. W., & Gedam, M. (2016). Survey of indoor positioning measurements, methods and techniques. International Journal of Computer Applications, 140(7), 1–4. https://doi.org/10.5120/ijca2016909361
- Slezak, C., Semkin, V., Andreev, S., Koucheryavy, Y., & Rangan, S. (2018). Empirical effects of dynamic human-body blockage in 60 GHz communications. IEEE Communications Magazine, 56(12), 60–66. https://doi.org/10.1109/MCOM.2018.1800232
- Slovak, J., Vasek, P., Simovec, M., Melicher, M., & Sismisova, D. 2019. “RTLS tracking of material flow in order to reveal weak spots in production process.” International Conference on Process Control (PC19), Strbske Pleso, Slovakia (IEEE), 234–238. https://doi.org/10.1109/PC.2019.8815220.
- Sony, M. (2020). Pros and cons of implementing Industry 4.0 for the organizations: A review and synthesis of evidence. Production & Manufacturing Research, 8(1), 244–272. https://doi.org/10.1080/21693277.2020.1781705
- Sosa-Sesma, S., & Perez-Navarro, A. 2016. “Fusion system based on WiFi and ultrasounds for in-home positioning systems: The UTOPIA experiment.” 2016 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Alcala de Henares, Spain (IEEE), 1–8. https://doi.org/10.1109/IPIN.2016.7743622.
- Sosnin, S., Lomayev, A., & Khoryaev, A. 2021. “DL-AOD positioning algorithm for enhanced 5G NR location services.” International Conference on Indoor Positioning and Indoor Navigation (IPIN), Lloret de Mar, Spain (IEEE), 1–7. https://doi.org/10.1109/IPIN51156.2021.9662638.
- Sun, B., Tan, B., Wang, W., & Lohan, E. S. (2021). A comparative study of 3D UE positioning in 5G new radio with a single station. Sensors (Basel, Switzerland), 21(4). https://doi.org/10.3390/s21041178
- Sun, H., Zhu, X., Liu, Y., & Liu, W. (2020). WiFi based fingerprinting positioning based on Seq2seq model. Sensors (Basel, Switzerland), 20(13). https://doi.org/10.3390/s20133767
- Tahat, A., Kaddoum, G., Yousefi, S., Valaee, S., & Gagnon, F. (2016). A look at the recent wireless positioning techniques with a focus on algorithms for moving receivers. IEEE Access, 4, 6652–6680. https://doi.org/10.1109/ACCESS.2016.2606486
- Thuong, N. T., Phong, H. T., Dinh-Thuan, D., van Hieu, P., & Loc, D. T. 2016. “Android application for WiFi based indoor position: System design and performance analysis.” International Conference on Information Networking (ICOIN), Kota Kinabalu, Malaysia (IEEE), 416–419. https://doi.org/10.1109/ICOIN.2016.7427147.
- Wang, Y., Cheng, L., Yingjie, Y., & Huang, S. 2021. “Enabling low-power high-accuracy positioning (LPHAP) in 3GPP NR standards.” International Conference on Indoor Positioning and Indoor Navigation (IPIN), Lloret de Mar, Spain (IEEE), 1–7. https://doi.org/10.1109/IPIN51156.2021.9662628.
- Wang, X., Mao, S., Pandey, S., & Agrawal, P. (2014). CA2T: Cooperative antenna arrays technique for pinpoint indoor localization. Procedia Computer Science, 34(6), 392–399. https://doi.org/10.1016/j.procs.2014.07.044
- Xiansheng, G., Ansari, N., Fangzi, H., Shao, Y., Elikplim, N. R., & Lin, L. (2020). A survey on fusion-based indoor positioning. IEEE Communications Surveys & Tutorials, 22(1), 566–594. https://doi.org/10.1109/COMST.2019.2951036
- Xin, X., Dan, L., Sun, M., Yang, S., Shujiang, Y., Manogaran, G., Mastorakis, G., & Mavromoustakis, C. X. (2019). Research on key technologies of smart campus teaching Platform based on 5G network. IEEE Access, 7, 20664–20675. https://doi.org/10.1109/ACCESS.2019.2894129
- Xiong, J., & Jamieson, K. 2013. “ArrayTrack: A fine-grained indoor location system.” Proc. 10th USENIX Symp. Netw. Syst. Design Implement, London, UK, University College London, 71–84.
- Xu, L., Eric, D., Xu, L., & Ling, L. (2018). Industry 4.0: State of the art and future trends. International Journal of Production Research, 56(8), 2941–2962. https://doi.org/10.1080/00207543.2018.1444806
- Yammine, G., Alawieh, M., Ilin, G., Momani, M., Elkhouly, M., Karbownik, P., Franke, N., & Eberlein, E. 2021. “Experimental investigation of 5G positioning performance using a mmWave measurement Setup.” International Conference on Indoor Positioning and Indoor Navigation (IPIN), Lloret de Mar, Spain (IEEE), 1–8. https://doi.org/10.1109/IPIN51156.2021.9662535.
- Yanying, G., Anthony, L., & Niemegeers, I. (2009). A survey of indoor positioning systems for wireless personal networks. IEEE Communications Surveys & Tutorials, 11(1), 13–32. https://doi.org/10.1109/SURV.2009.090103
- Yildirim, B. S., Cetiner, B. A., Roqueta, G., & Jofre, L. (2009). Integrated Bluetooth and UWB antenna. IEEE Antennas and Wireless Propagation Letters, 8, 149–152. https://doi.org/10.1109/LAWP.2009.2013371
- Yong, Y., Stecke, K. E., & Dongni, L. (2018). The evolution of production systems from industry 2.0 through industry 4.0. International Journal of Production Research, 56(1–2), 848–861. https://doi.org/10.1080/00207543.2017.1403664
- Yongtao, M., Wang, B., Pei, S., Zhang, Y., Zhang, S., & Jiexiao, Y. (2018). An indoor localization method based on AOA and PDOA using virtual stations in multipath and NLOS environments for passive UHF RFID. IEEE Access, 6, 31772–31782. https://doi.org/10.1109/ACCESS.2018.2838590
- You, L., Zhuang, Y., Xin, H., Gao, Z., Jia, H., Chen, L., Zhe, H., Pei, L., Chen, K., Wang, M., Niu, X., Chen, R., Thompson, J., Ghannouchi, F. M., & El-Sheimy, N. (2021). Toward location-enabled IoT (LE-IoT): IoT positioning techniques, error sources, and error mitigation. IEEE Internet of Things Journal, 8(6), 4035–4062. https://doi.org/10.1109/JIOT.2020.3019199
- Yuan, X., Ahn, C. K., Shmaliy, Y. S., Chen, X., & Yueyang, L. (2018). Adaptive robust INS/UWB-integrated human tracking using UFIR filter bank. Measurement, 123(1), 1–7. https://doi.org/10.1016/j.measurement.2018.03.043
- Yuan, W., Shaodan, M., & Chen, C. L. P. (2014). TOA-based passive localization in quasi-synchronous networks. IEEE Communications Letters, 18(4), 592–595. https://doi.org/10.1109/LCOMM.2014.021214.132662
- Zekavat, S. A., & Buehrer, R. M. 2019. Handbook of position location: Theory, practice, and advances. Second edition. IEEE series on digital & mobile communication. Hoboken: IEEE Press; Wiley.
- Zhang, X. 2021. “Indoor precise positioning demonstration: 5G-ACIA demo session: 5G for connecting and locating mobile devices Hannover Messe .” April 14. Accessed April 30, 2021. https://www.hannovermesse.de/veranstaltung/5g-acia-demo-session-5g-for-connecting-and-locating-mobile-devices/ld/98601.
- Zhang, Y., Gong, X., Liu, K., & Zhang, S. (2021b). Localization and tracking of an indoor autonomous vehicle based on the phase difference of passive UHF RFID signals. Sensors (Basel, Switzerland), 21(9). https://doi.org/10.3390/s21093286
- Zhang, Y., Jin, J., Liu, C., & Jia, P. (2021a). Indoor 3D dynamic reconstruction fingerprint matching algorithm in 5G ultra-dense network. KSII TIIS, 15, 1. https://doi.org/10.3837/tiis.2021.01.019
- Zhang, D., Xia, F., Yang, Z., Yao, L., & Zhao, W. 2010. “Localization technologies for indoor human tracking.” International Conference on Future Information Technology, Busan, Korea (South) (IEEE), 1–6. doi:10.1109/FUTURETECH.2010.5482731.
- Zuo, Z., Liu, L., Zhang, L., & Fang, Y. (2018). Indoor positioning based on Bluetooth low-energy beacons adopting graph optimization. Sensors (Basel, Switzerland), 18(11), 3736. https://doi.org/10.3390/s18113736
Appendix
Figure A1. Publications by year and positioning technology
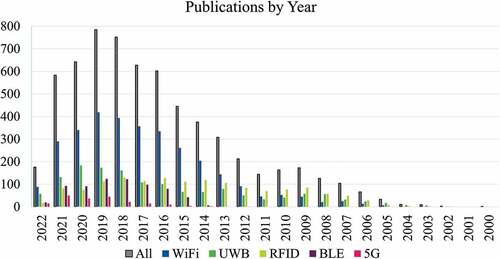
Figure A2.
Bibliometric structure of 5G positioning for industry and indoor
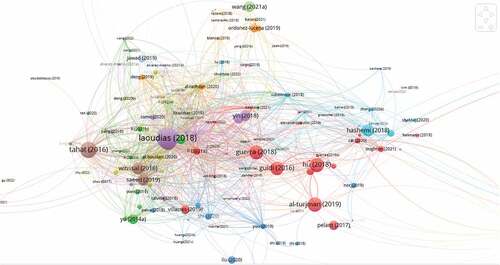
Figure A3.
Bibliometric structure of 5G positioning for industry and indoor since 2019
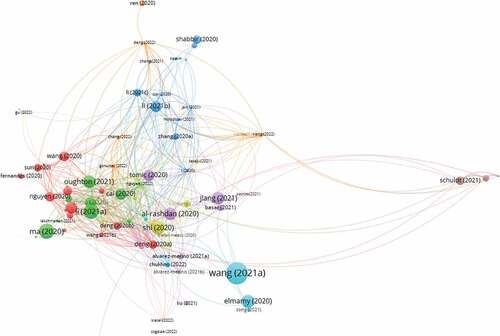
Table A4.
Acronym Table