
ABSTRACT
Industry 4.0 (I4.0) brings a set of challenges that need to be settled to enable the expected industrial revolution. Cyber-Physical Systems (CPS) and Autonomous Robots are two of mainstream I4.0 technologies and can be combined with other Enabling Technologies to overcome main I4.0 challenges. This Systematic Literature Review (SLR) aimed to understand how these Enabling Technologies were combined with CPS and Autonomous Robots to achieve fully featured I4.0 solutions. The 5C is a CPS architecture which was used as a measurement to CPS compliance. After filtering and processing 15,144 papers from six different academic search engines, it was found that full 5C compliant solutions are rare to find; that not all enabling technologies were integrated; and most of existing research focused in implementing practical solutions, but comparison to conventional approaches is scarce. We conclude that there is a need for further research to accomplish full 5C I4.0.
1. Introduction
Last decades’ advances and confluence of several technologies, known as enabling technologies, permitted the development of the industry 4.0 (I4.0) concept (Bigliardi et al., Citation2020; Lasi et al., Citation2014). To provide background for future research, a Systematic Literature Review (SLR) was conducted to better understand how Cyber Physical Systems (CPS) and Autonomous Robots (AR) have been merged with other enabling technologies to fully achieve I4.0 features.
I4.0 was introduced in 2011 by the German government as a research program in which technological advances were merged into a single line of research that would enable the industry of the future (Turner et al., Citation2016). According to Onaji et al. (Citation2022), I4.0 drives the manufacturing industry into a new era of autonomous and intelligent information exchange, machine control and interoperable production systems. The I4.0 enabling technologies include Cyber Physical Systems (CPS), Internet of Things (IoT), embedded systems, Digital Twin (DT), cloud computing, big data analytics, machine learning, advanced manufacturing technologies with sensors, decentralized agent-driven control, Autonomous Robotics (AR), simulation or Virtual Reality (VR), augmented reality, advanced tracking and tracing technologies, cybersecurity and additive manufacturing (Rüβmann et al. Citation2015; Bigliardi et al., Citation2020; Negri et al., Citation2017; Onaji et al., Citation2022).
CPS can be traced back to 2006, when the US National Foundation of Science held the first CPS Workshop announcing that (Rajkumar et al., Citation2010): ‘Cyber-Physical Systems seeks new scientific foundations and technologies to enable the rapid and reliable development and integration of computer and information-centric physical and engineered systems. The goal of the initiative is to usher in a new generation of engineered systems that are highly dependable, efficiently produced, and capable of advanced performance in information, computation, communication, and control’.
In 2014 the US National Institute of Standards and Technology started to produce a document to structure the technology and the interoperability between the various CPS which was released in 2016 and its official version was edited in 2017 (Griffor et al., Citation2017). This document defined that: ‘CPS are smart systems that include engineered interacting networks of physical and computational components. These highly interconnected and integrated systems provide new functionalities to improve quality of life and enable technological advances in critical areas, such as personalized health care, emergency response, traffic flow management, smart manufacturing, defense and homeland security, and energy supply and use.’ In Europe, several projects have been funded by the European Commission to foster CPS adoption by small and medium enterprises (Sassanelli & Terzi, Citation2022).
In I4.0 all the production components, such as workers, products, and systems, must be integrated into an intelligent system, self-organized and autonomously optimized systems called Cyber Physical Production Systems (CPPS) or Smart Factories (Monostori et al., Citation2016). According to Trappey et al. (Citation2016), CPS is a tool to overcome the challenges of I4.0 with characteristics such as timeliness, distribution, reliability, fault tolerance, security, scalability, and autonomous operation to enhance the transition from I3.0 to I4.0.
I4.0 is a confluence of technologies that would allow new perspectives to manufacturing systems such as digital servitization which ‘can be conceptualized as the development of new services and/or the improvement of existing ones through the use of digital technologies. These can be exploited to enable new (digital) business models, to find novel ways of (co)creating value, as well as to generate knowledge from data, improve the firm’s operational and environmental performance, and gain a competitive advantage’ (Paschou et al. Citation2020).
Automated Guided Vehicles (AGV), Autonomous Mobile Robots (AMR) and Autonomous Manipulators are cases of AR which can be applied in the context of I4.0 to enable flexibility in manufacturing. The use of AR enables the process adequation to different manufacturing demands, volume, product features, etc. (Monostori et al., Citation2016; Nakayama et al., Citation2020). AR has gained a lot of attention due to the media coverage to service AR, animal-like robots and so on (Kleinman Citation2021). The agility, flexibility and repeatability of AR are valuable features in the manufacturing environment, yet to be fully explored. Therefore, to foresee the future of I4.0 it is important to analyze how CPS and AR have been integrated and presented in the literature. In general, the implementation of I4.0 can be assessed by maturity models which are tools to assess enterprises and organizations. Maturity models can serve as implementation roadmap as well as a method to evaluate how these technologies support their product development process (Amaral et al., Citation2019; Sassanelli et al., Citation2020).
A Systematic Literature Review (SLR) allows to identify the status of a given research topic in a formal, wide, detailed, and reproducible way. In this SLR we assessed which technological features of I4.0 are present in the literature. In this context the 5C Architecture, which is an implementation architecture for CPS in I4.0 based on five levels of deployment (Lee et al., Citation2015) will be used as benchmark.
Despite the existence of another related architecture for I4.0 (Pivoto et al., Citation2021) like the Architecture Reference Model for the Industry 4.0 (RAMI 4.0) and the Industrial Internet Reference Architecture (IRA), the 5C was adopted as benchmarking due its focus on CPS. Each level of the 5C is related to a specific attribute of I4.0 and the correspondent technology. For instance, in the Connection level, condition monitoring takes place through IoT, embedded systems and ontology technologies. Machine Learning is responsible for the self-awareness in the Conversion level, Autonomous Robots enable self-comparison, self-configuration, and self-adaptability. A list of attributes and related technologies are presented in .
Table 1. CPS 5C architecture (Lee et al., Citation2015).
A Systematic Literature Review (SLR) allows to identify the status of a given research topic in a formal, wide, detailed, and reproducible way. To provide background for future research, a SLR was conducted to better understand how Cyber Physical Systems (CPS) and Autonomous Robots (AR) have been merged with other enabling technologies to fully achieve I4.0 features. In this SLR we assessed which technological features of I4.0 are present in the literature. In this context the 5C Architecture, which is an implementation architecture for CPS in I4.0 based on five levels of deployment (Lee et al., Citation2015), will be used as a benchmark.
The present SLR contributes to answer how CPS and AR have been applied in I4.0. Further, it is necessary to know how each system has been compared to traditional industries.
2. Related systematic literature reviews
It was possible to identify six related SLRs with focus in CPS (alone): Self-Adaptation architectures and mechanisms (Muccini et al., Citation2016); the role of Digital Twin (Atalay et al., Citation2022; Negri et al., Citation2017; Wilhelm et al., Citation2021); Multi-Agent Negotiation for CPS (Calvaresi et al., Citation2018); the conceptual transference between interoperability and integration for CPS (Gürdür & Asplund, Citation2018); and the evolution of Artificial Intelligence in CPS (Radanliev et al., Citation2021). I4.0 was the focus of four SLRs: current research status and a research agenda for I4.0 (Liao et al., Citation2017), the I4.0 in management literature (Piccarozzi et al., Citation2018); the research status and a research agenda for Industrial Artificial Intelligence in I4.0 (Peres et al., Citation2020); and the sustainability and green processes outcomes in I4.0 (Vrchota et al., Citation2020).
Logistics 4.0 which uses AR intensively was the focus of two related SLRs: The applicability of lean and green concepts (Edirisuriya et al., Citation2018) and a conceptual framework (Winkelhaus & Grosse, Citation2020). Smart Factories which is another terminology for CPPS was the focus of two other SLRs: A conceptual control framework (Rojas & Rauch, Citation2019) and the research status and agenda (Osterrieder et al., Citation2020). The use of simulation tools, including Digital Twin and Virtual Reality, which are technologies closely related to CPS, to support disassembly processes of printed circuits, was the focus of a SLR (Sassanelli et al., Citation2021); The digital servitization phenomenon was the focus of other SLR (Paschou et al. Citation2020).
All above SLRs were specific in terms of technologies or only focused on concepts. The most closely related SLR found that a regulatory framework and end-to-end digital integration are research gaps (Liao et al., Citation2017). None of these 17 SLRs, even the most recent one, did not address how AR and CPS are merged with other enabling technologies to successfully achieve the I4.0 features. Therefore, we sought to fill this gap through the present SLR.
3. Methodology
Papers selection methodology followed a systematic protocol (Petersen et al., Citation2015). After defining the research protocol, searches were carried out in six Academic Search Engines (ASE) for papers in journals and proceedings. Papers were then filtered by objective and subjective exclusion and inclusion criteria previously defined in the search protocol. The resulting papers were then used in the data extraction stage and then were further analyzed to obtain the final literature review ().
Table 2. Selected papers, their type and ID.
3.1. Research question definitions
To understand the knowledge gap on how the Enabling Technologies (Bigliardi et al., Citation2020) were combined with CPS and AR in the context of I4.0 a Primary Research Question (PQ) was proposed. The PQ was structured using the PICO (Population, Intervention, Comparison and Outcomes) strategy (Kitchenham & Charters, Citation2007; Petersen et al., Citation2015):
How CPS and Autonomous Robots (I) have been applied in I4.0 (P) and how the system’s performance has been measured (O) in comparison to traditional industries (C)?
The following Secondary Research Questions (SQ) were constructed to help answering the PQ:
SQ1: Which industries and metrics have been covered?
SQ2: How is the compliance to the 5C Architecture?
SQ3: Which application areas and technologies have been involved?
3.2. Search
The following ASEs were used: ACM Digital Library (ADL), Engineering Village (EV), IEEE Explore (IEEE), Science Direct (SD), Scopus (SC) and Springer Link (SL). These ASEs were selected because they include main subject areas regarding this search and are full of research features (Buchinger et al., Citation2014). Search string used at EV, IEEE and SL was:
((Cyber-Physical Systems) OR (Cyber Physical Systems) OR CPS OR (Smart Factory)) AND ((Industry 4.0) AND (Mobile OR Robot OR AMR))
Search string was adjusted in each ASE due to the different syntax requirements to keep the same semantic goal.
3.3. Selection
Papers selection was done in four filtering steps. (i) The first selection procedure was made over the 15,144 results by searching for the search string keywords in the papers’ titles and abstracts. (ii) A second selection was done over the remaining 6511 papers by reading their abstract to identify the publication focus. (iii) 506 papers were submitted to a skinning read over the complete text to verify the compliance of the selected papers to the inclusion criteria. (iv) 136 papers were submitted to a more careful reading resulting in the selection of 65 papers. After the execution of the systematic review protocol five more papers with practical implementations came to the attention of the authors and were included ad hoc for the sake of this review completeness: Ansari et al. (Citation2019) (P66), Ding et al. (Citation2021) (P67), Khalid et al. Citation2022 (P68), Rocca et al. (Citation2020) (P69) and Müller et al. (Citation2022) (P70).
Only journal and proceeding papers written in English from 2006 to 2021 were considered. Papers published before 2006 were not considered since CPS concept was not settled. Also, only papers with its text fully and freely available via Capes (Coordination for the Improvement of Higher Education – Brazil) were included. The search in the ASEs was intended to be executed for title, keywords and abstract; however, some of the ASEs did not give these options, so the search was executed in the full text and filtered later by title using Mendeley (Zaugg et al., Citation2011). gives the initial and final number of selected papers.
Table 3. SLR search, selection, and exclusion criteria results.
The number of excluded papers is also presented in following three exclusion criteria: review or overview papers (EC1), papers not focused on the concept of CPS (EC2), and those missing the use of robots (EC3). The papers which included any experimental application or prototype of the proposed methodologies or systems were identified as Practical. Otherwise, they were identified as Conceptual (). The number of Practical publications exceeded the Conceptual since 2020 (see ).
Table 4. Publication area.
4. Results
4.1. Sample description
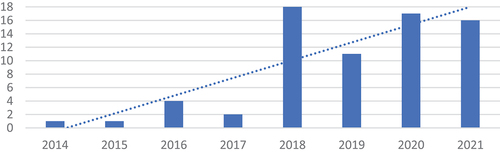
Despite that the search included paper from 2006, the selected sample included papers published between 2014 and 2022 only. The most prominent year was 2018 with 18 papers, nearly followed by 2020 (17 papers) and 2021 (16 papers). The historical series can be found in .
Figure 1. Historical series of selected papers by year.
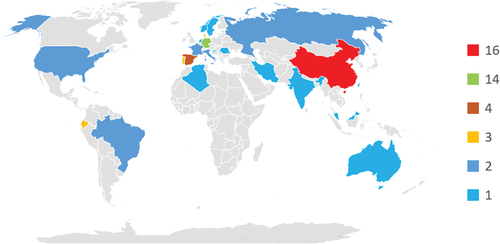
The institutional nationality of the first authors (see ) indicates that most of the selected papers were published in China (colored in red) and Germany (in green). All the other nationality had four or less selected papers. Brazil, Italy, and Russia appeared only twice, for example.
Figure 2. Institutional nationality of the first author.
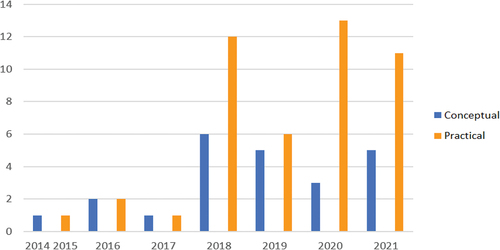
Papers that included any experimental application or prototype of the proposed methodologies or systems were identified as Practical. Otherwise, they were identified as Conceptual (). The number of Practical publications among the selected papers exceeded the Conceptual after 2018 ().
Figure 3. Research typology distribution by year.
All the 65 selected papers plus the 5 ad hoc papers were published in 48 distinct journals or events. summarizes the publications’ areas, which was inferred considering papers’ objective and research context. Most of the papers were targeted to general industry, only 10 papers targeted a specific industrial area such as warehouse (Eltester et al., Citation2020; Kattepur et al., Citation2018; Zhao et al., Citation2020), automotive industry (Liu et al., Citation2019), metal industry (Smirnov & Kashevnik, Citation2018), mobile phone industry (Andersen et al., Citation2017), oil industry (Rahman et al., Citation2019), pharma industry (Alzeyadi & Farzaneh, Citation2019), postal industry (Niati et al., Citation2020), electric and electronic equipment waste disassembly plant (Rocca et al., Citation2020) and, aeronautics (Franceschi et al. Citation2022).
4.2. Quantitative data extraction
From the 70 papers 44 defined the Robotic Task and the number of robots employed on it. The most frequent task was pick-and-place (36 papers) followed by transport (24 papers) and assembling (13 papers). The most used robotic configuration was 1 arm (16 papers) or 1 AGV (16 papers).
accounts for papers’ enabling technologies for I4.0 (Bigliardi et al., Citation2020; Lasi et al., Citation2014; Negri et al., Citation2017). IoT is the most frequent enabling technology employed by the proposed systems. The second most employed enabling technology was artificial intelligence. Five papers did not mention any other technology combined with CPS or autonomous robots. The protocol most used to enable connectivity to the systems components was IEEE 802.11 also known as Wi Fi. Five papers used robotic communications protocols combined with IoT (Internet of Things), ROS (Robot Operating System) and RobAPI (proprietary communication protocol).
Table 5. Enabling technologies.
presents papers’ identified performance metrics grouped by similarity. Operation Time was the most used metric. But most papers did not specify any system performance metric. lists which paper used which level of the 5C architecture.
Table 6. Performance metric.
In , ‘other’ performance metrics refer to response time and latency (Alhama Blanco et al. Citation2018), convergence analysis (Kattepur et al., Citation2018), system stability (Cao et al., Citation2020), data transmission delay (Marcheras et al., Citation2020), AI training steps (Xia et al., Citation2021), percentual downtime (Ansari et al., Citation2019), and robotic force and position variation under a cyberattack (Khalid et al. Citation2022).
Among all the identified papers, only 10 reached the full 5C architecture, many implemented 3C or less, and 8 papers did not implement or mention the 5C CPS architecture at all (). Despite the fact that the 5C architecture is hierarchical, some papers implemented specific levels without mentioning the previous one. For example, three papers implemented Conversion, Cyber and Cognition levels without mentioning the Connection level (Campean et al., Citation2021; Liu et al., Citation2019; Rahman et al., Citation2019).
Table 7. 5C architecture compliance.
4.2.1. Summary of quantitative data
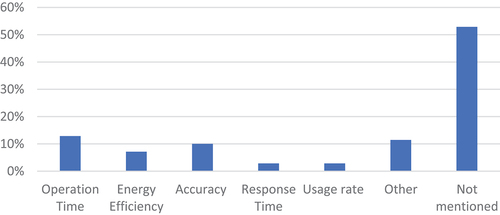
Regarding SQ1 it was found that about 52% of the papers did not specify any kind of performance metric for the proposed CPS (), but operation time (the execution time of a given task) was the most frequent proposed metric (). Very few papers made any performance comparison to validate the obtained results (4%).
Figure 4. Types of performance metrics’ distribution.
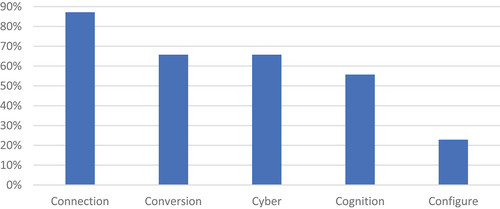
In this SLR the implementation of the 5C Architecture (Lee et al., Citation2015) in the selected publications was assessed as a form of measuring the maturity of the proposed CPS in the selected papers (). Regarding SQ2 it was found that only 14% of the selected papers considered all five levels of the CPS architecture implementation (). About 11% of the identified papers did not define the implementation in any level of the 5C CPS Architecture.
Figure 5. 5C levels’ distribution.
Regarding SQ3 it was found that 22% of publications did not specify the Robotic Tasks, and 27% did not mention the number of robots used. Pick-and-place and Transport were the most frequent Robotic Tasks which suggests that these are also the most proper to be executed by Autonomous Robots in CPS, where 56% of the papers used one to three robots.
Papers about practical applications are predominant in the selected studies (67%) (see ) and 2018 was the most prominent year holding 25% of the selected papers. About 87% of the selected papers were related to manufacturing industry in general, specific areas like Logistics, Pharma Industry and Warehouse, appeared in about 13% of the papers.
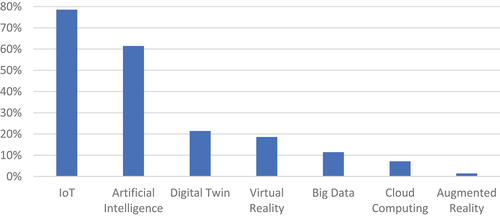
This SLR identified five Enabling Technologies that were combined with CPS and Autonomous Robots in the selected papers (), the most frequent one was IoT and related communications protocols, followed by Artificial Intelligence, Digital Twin, Virtual Reality, Big Data, Cloud Computing and Augmented Reality ().
Figure 6. Enabling technologies’ distribution.
4.3. Qualitative data analysis
During the analysis of the selected papers of a SLR it is usual to emerge a classification scheme from the intellectual process (Kitchenham & Charters, Citation2007; Petersen et al., Citation2015). In the present SLR the identified similarities in conceptual and practical contributions were used to classify the selected papers as follows.
Most of the papers were grouped as ‘Cognition and Configure’. Papers in this group aimed to enable decision-making support, self-configuration and/or self-adaptability;
Many papers were specifically aiming to improve the AGV in the context of the I4.0 and CPS, most of them focused on the ‘Conversion’ and ‘Cyber’ levels. These were grouped under ‘Automatic Guided Vehicles’;
The third group of papers, named ‘Connection’, focused on improving the integration, security, and interoperability of the heterogenous components of a CPS;
A fourth group of papers, named ‘Standardization’, was focused on the adoption or the proposition of a specific standard to approach different aspects of I4.0 and CPS.
Human-Robot Collaboration (HRC) was the focus of a group of papers which made use of CPS and another enabling technologies to improve the HRC;
Other contributions focused on maintenance, system specification, product customization and usability were clustered under ‘Other I4.0 Related Contributions’.
These contribution classes are detailed as follows.
4.3.1. Cognition and Configure
The study of industrial robot control architectures was the most common among the papers in which the Configure and Cognition levels of the 5C architecture were implemented. Most of the papers proposed Digital Twin-based systems: self-configurable CPS robotic cell architecture (Blanco et al. 2018); simulation-based control architectures using Artificial Intelligence (Priggemeyer & Roßmann 2018), ROS (Shu et al., Citation2018) and IoT (Szabo et al., Citation2019); a data and knowledge-driven robotic cell (Zhang et al., Citation2019); a Business Process Modeling approach for CPS (Niati et al., Citation2020); the use of Deep Learning to enable DT-based control (Vladareanu et al., Citation2020); Artificial Intelligence and DT-based systems for supervision and monitoring of manufacture (Franceschi et al. Citation2022) and for an improved system design framework (Pires et al., Citation2021; Sajjad et al. Citation2021); the use of a DT-based transfer learning method for Deep Learning algorithms (Maschler et al., Citation2021); a DT-based architecture for simulation, communication, intelligent scheduling using Deep Reinforcement Learning (Xia et al., Citation2021); a framework using DT, Cloud Computing, Robot Control as-a-Service and Artificial Intelligence (Xu et al., Citation2021); a DT-based visual monitoring and prediction system for shop-floor (Zhuang et al., Citation2021) and the application of VR and DT to support a sustainable process and products in the context of industry 4.0 (Rocca et al., Citation2020). Other authors proposed a CPS-based decentralized architecture for shop-floor assembly (Tan Citation2020) and a knowledge model-based self-configurated CPS architecture (Müller et al., Citation2022). Authors claim that their systems enable self-configuration (Michniewicz & Reinhart, Citation2014; Müller et al., Citation2022; Priggemeyer & Rossmann, Citation2018), self-adaptability (Maschler et al., Citation2021; Shu et al., Citation2018), optimizes decision making (Niati et al., Citation2020; Tan et al., Citation2020; Zhang et al., Citation2019), demonstrates feasibility and effectiveness (Tan et al., Citation2020; Xia et al., Citation2021; Xu et al., Citation2021; Zhuang et al., Citation2021), can be used as a commercial solution (Vladareanu et al., Citation2020) and allows optimized use of resources increasing production cycles sustainability (Rocca et al., Citation2020). One paper found that the system fails completely with high latency scenarios (Szabo et al., Citation2019).
The autonomous control for robotic multi-agent systems was also a goal in which some papers presented contributions to enable the higher levels of the 5C CPS Architecture. Contract Net Protocols are a task-sharing protocol in multi-agent systems (Smith, Citation1980) and a Smart Contract is a feature in Blockchain applications, which implements trusted transactions without third parties (Liu & Liu, Citation2019). Some of the proposed systems made use of Contract Net Protocols (Wang et al., Citation2016) or Blockchain Smart Contracts (Ding et al., Citation2021; Kapitonov et al., Citation2018) to organize robotic multi-agent systems. Other papers proposed a vertical and horizontal integration architecture (Liu et al., Citation2019); multi-agent based Deep Reinforcement Learning algorithm (Cao et al., Citation2020); and a real-time Multi-Robot Task Allocation System to coordinate a heterogeneous Multi Robot System (Nie and Chen Citation2022). These papers claim that their systems achieved flexibility (Wang et al., Citation2016; Cao et al., Citation2020; Nie and Chen Citation2022), viability (Kapitonov et al., Citation2018; Liu et al., Citation2019; Cao et al., Citation2020, Nie and Chen Citation2022; Ding et al., Citation2021) and reliability (Ding et al., Citation2021; Liu et al., Citation2019).
In the context of Industrial Robot Control Architecture, a framework for modelling and assuring resilience by design (Campean et al., Citation2021) and a Distributive Adaptative Control Cognitive Architecture for CPS (Rosado et al. Citation2021). Authors concluded that the proposed framework is significant for both managing and communicating the resilience of a system within the socio-technical context (Campean et al., Citation2021) and that the proposed architecture can help addressing I4.0 in future implementations (Rosado et al. Citation2021).
4.3.2. Automatic Guided Vehicles
Energy efficiency and load balance scheduling were the most frequent contributions in the context of AGVs’. Papers proposed the use of multi-agent systems combined with distributed control (Alzeyadi & Farzaneh, Citation2019; Kattepur et al., Citation2018; Wan et al., Citation2018), optimization algorithms (Alzeyadi & Farzaneh, Citation2019; Kattepur et al., Citation2018; Rahman et al., Citation2019), and adaptative genetic algorithms (Rahman et al., Citation2019). Another paper proposed a IoT-based energy warning and control system (Yang et al., Citation2018). These papers claim that their proposed systems demonstrated gains in energy efficiency and optimized load and task distribution.
AGVs’ autonomy was also aimed by some papers which proposed a graph-based analytical system with autonomous robots (Zug et al., Citation2015), the development of a CPS-based approach (Andersen et al., Citation2017; Lee et al., Citation2018); a DT-based mobile manipulator (Alhama Blanco et al. Citation2018) an open platform for AGV with Digital Twin (Seder et al., Citation2019), a Smart Factory based on the RoboCup Logistics League setup (Eltester et al., Citation2020) and on communication and computing layers (Tang et al., Citation2016), the use of behavior trees and Reinforcement Learning (Hu et al. Citation2020). These papers claim that their proposed systems had a successful implementation and demonstrated their viability.
4.3.3. Connection
Network integration and data transfer optimization for smart factories were also found that explored network routing and energy consumption (Luo et al., Citation2018), a middleware with interoperability features to enable CPS connectivity (Marcheras et al., Citation2020), the use of a ROS based Edge Node for the interoperability between Robots and other IoT devices (Zhao et al., Citation2020), a framework for 5 G wireless integration (Rodriguez et al., Citation2021), the use of Informatics SoS and Device Bus as a framework (Vicente et al., Citation2021) and the use of an Asset Administration Shell-Enabled Digital Solution for manufacturing systems (Ye et al., Citation2021). Experiments demonstrated that the system could operate under five times more efficient energy usage, with half bandwidth requirements enabling a higher amount of AGVs to be used at the same time (Luo et al., Citation2018). It was also demonstrated that systems made CPS integration feasible (Marcheras et al., Citation2020; Zhao et al., Citation2020), flexible (Zhao et al., Citation2020), reliable (Rodriguez et al., Citation2021), enable customization (Vicente et al., Citation2021) and reduced development and update expenses (Ye et al., Citation2021).
In the context of communication protocols, a performance evaluation for several IoT protocols (Bezerra et al., Citation2018) and a security protocol for CPS (Dahlmanns et al., Citation2021) were proposed. Authors demonstrated that MQTT was more efficient in terms of total process time in a simulated Smart Factory environment (Bezerra et al., Citation2018) and the feasibility of the security framework on top of MQTT protocols (Dahlmanns et al., Citation2021).
To understand the consequences of a cyber-attack in a Smart Factory a holistic view of the security issues and challenges that arise in designing and securely deploying controlled manufacturing systems was proposed (Pogliani et al., Citation2019). It was found that attacks that exploit robot programming languages, untrusted inputs, and weaknesses in the implementation of permission systems can result in an attacker gaining full remote control of an industrial plant (Pogliani et al., Citation2019).
4.3.4. Standardization
In the context of industrial robot control architecture and HRC, IEC 61,499 Function Blocks were used as an approach to enable robotic cell adaptability to different processes (Adamson et al., Citation2017), Cyber-Physical Production Systems (Garcia et al., Citation2018), flexible control and energy consumption prediction (Yao et al., Citation2018) and Smart HRC in welding process (Garcia Citation2020). These papers claim that the IEC 61,499 Function Blocks were successfully used to enable CPS low-cost design (Garcia Citation2020), accuracy (Yao et al., Citation2018) and flexibility (Adamson et al., Citation2017; Garcia et al., Citation2018; Yao et al., Citation2018). In the same context a simulation-based control architecture using RAMI 4.0 Asset Administration Shells was proposed to enable I4.0 control (Priggemeyer & Rossmann, Citation2020). Despite the impossibility to satisfy all industrial branches with only one architecture, these authors concluded that it is possible to find a common ground simulation-based control architecture for all of them.
In the context of I4.0 Systems Design, a reference architecture model was proposed to identify and integrate I4.0 enabling technologies like IoT and Cloud Computing to support hybrid manufacturing processes (Erasmus et al., Citation2018) and the use of standardized protocols and DT representations to enable CPS interoperability (Inigo et al., Citation2020). An approach to support specification and modeling CPS using the Architecture Analysis & Design Language standard was also proposed (Zhang, Citation2018). These papers claim to have demonstrated feasibility and effectiveness.
4.3.5. Human Robot Collaboration (HRC)
The implementation of the HRC was the objective of many papers which proposed the following DT-based approaches: the use of a robot grasp and human ergonomics analysis before any action is taken in real world (Malik & Bilberg, Citation2018); an Augmented and Virtual Reality-based workstation design and assessment system (Havard et al., Citation2019); and a Virtual Reality-based commissioning methodology (Pérez et al., Citation2020). A design methodology using sensors and computational vision for a collaborative robotic CPS was also proposed to implement HRC (Khalid et al., Citation2016).
A safety and security framework for CPS HRC (Lichte & Wolf, Citation2018) and a I4.0 HRC flexibility architecture taking a user-centered safety approach (Pantano et al., Citation2020) were proposed. The effects of a cyberattack over a HC system were studied (Khalid et al. Citation2022). The authors considered that the harmonization of the I4.0 flexibility goals, simulation and prototyping are crucial for the development of safe and secure HRC environments.
4.3.6. Other I4.0 Related Contributions
Condition Monitoring Systems are used to monitor and analyze equipment maintenance parameters aiming to predict and proactively avoid failure. To approach this problem in the context of Smart Factories maintenance a socio-CPS-based System (Fleischmann et al., Citation2016), a CPS-based system (Guacapiña Citation2020) and prescriptive maintenance model (Ansari et al., Citation2019) were proposed to enable a more effective maintenance system. Developed frameworks delivered significant contributions to the ongoing design and architectural development of Condition Monitoring System in I4.0: the establishment of the basis for the standardized application of various condition monitoring functionalities (Guacapiña Citation2020); the representation of a starting point for further developments in Socio-CPS and Condition Monitoring Systems (Fleischmann et al., Citation2016); the conceptualization of a knowledge-based model for prescriptive maintenance (Ansari et al., Citation2019). The results demonstrated that the design, implementation, and programming have sufficient robustness, efficiency, and ability to be used in other manufacturing environments (Guacapiña Citation2020) and from 12% to 25% reduction in maintenance downtime (Ansari et al., Citation2019).
With the objective of improving the specification and design of I4.0 systems the use of a system dynamic model was proposed. It gives a better understanding of the I4.0 systems and focusing in the most important components and interactions (Khakifirooz et al., Citation2018) and theoretical constraint development, analysis, and validation methods for I4.0 systems (Silva et al., Citation2020). It was demonstrated that the system dynamic model gives a broader vision of system development requirements (Khakifirooz et al., Citation2018) and that the proposed framework for constraint validations was able to observe many uncertainty sources, vital for designing I4.0 systems (Silva et al., Citation2020).
The usability of a CPS was addressed by the development of a robust, user-friendly, scalable, flexible, and self-configurable tool able to describe, control, visualize and represent the complexity of a CPS using DT (Jörg et al., Citation2019). It aimed to enable CPS supervision and control without prior programming knowledge. Authors concluded that Unity3D (a commercial game engine) is suitable for the implementation of a CPS interface but require the integration of a more powerful physical simulator to be used in industry (Jörg et al., Citation2019).
A cloud-based ubiquitous robotic system that could enable Cloud Manufacturing was proposed to address the problem of product customizability (Zhang et al., Citation2019). Authors considered that many technologies, as CPS and 3D printing, required by the system were not mature enough to satisfy the system requirements. As a result, the proposed system could not completely fulfill the objectives and was not able to achieve self-configuration (Zhang et al., Citation2019).
5. Discussion
It was found that the majority of papers with a higher number of 5C architecture levels were those with systems, methods and architecture propositions without case studies or any kind of implementation, due to the complexity of implementing all 5C levels. In contrast, most papers covering only one or two levels of the 5C were those with case studies and performance validations, particularly those which cover only the connection level.
Most of the papers were related to AGV or to static industrial robots. Only two of the selected papers mentioned the AMR, which can be considered, to some extent, as a synonym of AGV. A trend was found in the use of AGV combined with industrial robots and multi-agent systems, which seems to be the answer to spatial and process flexibility in the I4.0.
The inclusion of the human operator as a component of the I4.0 in a safe and secure way appears to be the focus of the papers covering HRC. Other aspects, like the operational efficiency, are usually put aside. Despite all the advantages of HRC, like the conciliation of employing AR and human operators, it was not completely explored due to the safety and security issues, inherent of HRC using AR in the I4.0, that still need to be addressed.
Even though the fourth industrial revolution did not set up a broadly recognized standard yet the Reference Architectural Model for Industry 4.0 (RAMI4.0) developed by the Electrical and Electronic Manufacturers’ Association (Germany) and, the IEC 61,499 developed by the International Electrotechnical Commission (France) are the most frequent standards in the context of I4.0. In contrast, the framework for CPS (Griffor et al., Citation2017) developed by the NIST is seldom used. The 5C was proposed as an CPS architecture in the academic context and can accommodate any standard. In contrast, IEC 61,499, RAMI4.0 and the framework for CPS are proposed standards which can be compatible with other architectures. A convergence of standards and architectures could establish a more complete and general solution which could become popular and easy interoperability of different CPSs among different enterprises.
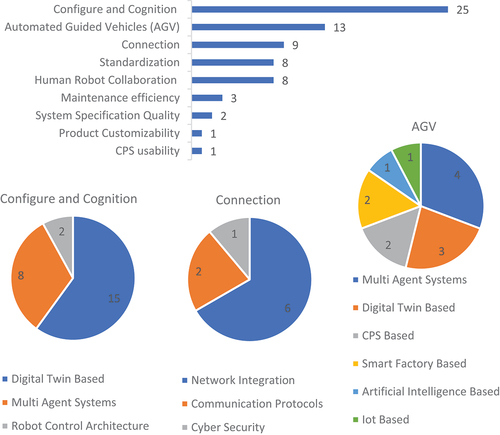
Some topics like problems related to maintenance, system specification, product customization and usability were seldom employed in the context of CPS, AR and I4.0 indicating those as good research opportunities. shows the distribution of selected papers among the biggest groups of interest. Further below, the figure shows a more qualitative analysis of results.
Figure 7. Groups of interest and Qualitative Analysis distribution.
6. Conclusions
Regarding the Primary Research Question, it was found that, even though CPS concept and research have been developed over the last 14 years, very few of the published papers have implemented a full 5C CPS Architecture with all the related attributes and capabilities.
Furthermore, associated Enabling Technologies such as Big Data and Augmented Reality were not completely explored in conjunction with CPS and Autonomous Robots. Even though Virtual Reality was employed in some papers, only a few of these explored its potential by using Digital Twins technology.
The system performance is usually measured in terms of Operation Time but comparison with traditional industry is not usual. One of the goals of implementing CPS and Autonomous Robots in I4.0 is to increase the production efficiency but very few papers assessed the system performance or compared it to traditional industrial systems. Configure and Cognition implementation, the use of AGVs, the development of standards, HRC and complex I4.0 networks are the main research trends identified in this SLR. Further, there are many research opportunities regarding the relationship between the 5C and other architectures, the development of comparative performance and potential I4.0 studies compared to I3.0.
6.1. Limitations
This study applied a systematic search and selection protocol with strict exclusion criteria which could result in some limitations. First, it only considered papers written in English, thus related papers published in other languages were not covered in this SLR. The second limitation is the paper’s availability: only open access papers or fully and freely available via Capes (Coordination for the Improvement of Higher Education – Brazil) were included. Third, the use of the search string applied to the paper titles, keywords and abstract might have excluded papers which used distinct terms.
Acknowledgments
Authors would like to thank the Conselho Nacional de Desenvolvimento Científico e Tecnológico (CNPq-Brasil) for the DT-II productivity´s grant (process 313398/2019-4), to Instituto Federal Catarinense for the PIQIFC (process 23348.001805/2019-63) and the Fundação de Amparo à Pesquisa e Inovação do Estado de Santa Catarina (FAPESC-Brazil) for partial funding to the LARVA laboratory, T.O. No.: 2021TR851 and to the LAMAN laboratory T.O. No.: 2021TR930.
Disclosure statement
The financial support mentioned below did not lead to any conflicts of interest regarding this manuscript.
Additional information
Funding
References
- Adamson, G., Wang, L., & Moore, P. (2017). Feature-based control and information framework for adaptive and distributed manufacturing in cyber physical systems. Journal of Manufacturing Systems, 43, 305–25. https://doi.org/10.1016/j.jmsy.2016.12.003
- Alhama Blanco, P., Abu-Dakka, F., & Abderrahim, M. (2018). Practical use of robot manipulators as intelligent Manufacturing systems. Sensors, 18(9), 2877. https://doi.org/10.3390/s18092877
- Alzeyadi, A., & Farzaneh, N. 2019. A novel energy-aware scheduling and load-balancing technique based on fog Computing. In: 2019 9th International Conference on Computer and Knowledge Engineering (ICCKE). Mashhad, Iran: IEEE; p. 104–109. https://doi.org/10.1109/ICCKE48569.2019.8964946
- Amaral, A., Jorge, D., Peças, P. (2019). Small medium enterprises and industry 4.0: Current models’ ineptitude and the proposal of a methodology to successfully implement industry 4.0 in small medium enterprises. Procedia Manufacturing, 41, 1103–1110. https://doi.org/10.1016/j.promfg.2019.10.039
- Andersen, R. E., Hansen, E. B., Cerny, D., Madsen, S., Pulendralingam, B., Bøgh, S., & Chrysostomou, D. (2017). Integration of a skill-based collaborative mobile robot in a Smart Cyber-physical environment. Procedia Manufacturing, 11, 114–123. https://doi.org/10.1016/j.promfg.2017.07.209
- Ansari, F., Glawar, R., & Nemeth, T. (2019). PriMa: A prescriptive maintenance model for cyber-physical production systems. International Journal of Computer Integrated Manufacturing, 32(4–5), 482–503. https://doi.org/10.1080/0951192X.2019.1571236
- Atalay, M., Murat, U., Oksuz, B., Parlaktuna, A. M., Pisirir, E., & Testik, M. C. (2022). Digital twins in manufacturing: Systematic literature review for physical–digital layer categorization and future research directions. International Journal of Computer Integrated Manufacturing, 35(7), 679–705. https://doi.org/10.1080/0951192X.2021.2022762
- Bezerra, D., Roque Aschoff, R., Szabo, G., & Sadok, D. 2018. An IoT Protocol Evaluation in a Smart Factory Environment. In: 2018 Latin American Robotic Symposium, 2018 Brazilian Symposium on Robotics (SBR) and 2018 Workshop on Robotics in Education (WRE). Joao Pessoa: IEEE; p. 118–123. https://doi.org/10.1109/LARS/SBR/WRE.2018.00030
- Bigliardi, B., Bottani, E., & Casella, G. (2020). Enabling technologies, application areas and impact of industry 4.0: A bibliographic analysis. Procedia Manufacturing, 42, 322–326. https://doi.org/10.1016/j.promfg.2020.02.086
- Buchinger, D., de S, C. G., & Hounsell, M. D. S. (2014). Mecanismos de busca acadêmica: uma análise quantitativa. Revista Brasileira de Computação Aplicada, 6(1), 108–120. https://doi.org/10.5335/rbca.2014.3452
- Calvaresi, D., Appoggetti, K., Lustrissimi, L., Marinoni, M., Sernani, P., Dragoni, A. F., & Schumacher, M. 2018. Multi-Agent Systems’ Negotiation Protocols for Cyber-Physical Systems: Results from a Systematic Literature Review: In: Proceedings of the 10th International Conference on Agents and Artificial Intelligence. Funchal, Madeira, Portugal: SCITEPRESS - Science and Technology Publications; p. 224–235. https://doi.org/10.5220/0006594802240235
- Campean, F., Kabir, S., Dao, C., Zhang, Q., & Eckert, C. (2021). Towards a resilience assurance model for robotic autonomous systems. Proc Des Soc, 1, 3189–3198. https://doi.org/10.1017/pds.2021.580
- Cao, Z., Zhou, P., Li, R., Huang, S., & Wu, D. (2020). Multiagent Deep Reinforcement Learning for joint multichannel Access and task offloading of Mobile-edge Computing in industry 4.0. IEEE Internet of Things Journal, 7(7), 6201–6213. https://doi.org/10.1109/JIOT.2020.2968951
- Dahlmanns, M., Pennekamp, J., Fink, I. B., Schoolmann, B., Wehrle, K., & Henze, M. 2021. Transparent end-to-end security for Publish/Subscribe communication in Cyber-physical systems. In: Proceedings of the 2021 ACM Workshop on Secure and Trustworthy Cyber-Physical Systems. Virtual Event USA: ACM; p. 78–87. https://doi.org/10.1145/3445969.3450423
- Ding, K., Fan, L., & Liu, C. (2021). Manufacturing system under I4.0 workshop based on blockchain: Research on architecture, operation mechanism and key technologies. Computers & Industrial Engineering, 161, 107672. https://doi.org/10.1016/j.cie.2021.107672
- Edirisuriya, A., Weerabahu, S., & Wickramarachchi, R. 2018. Applicability of lean and green concepts in Logistics 4.0: A systematic review of literature. In: 2018 International Conference on Production and Operations Management Society (POMS). Peradeniya, Sri Lanka: IEEE; p. 1–8. https://doi.org/10.1109/POMS.2018.8629443
- Eltester, N. S., Ferrein, A., & Schiffer, S. 2020. A Smart Factory setup based on the RoboCup Logistics League. In: 2020 IEEE Conference on Industrial Cyberphysical Systems (ICPS). Tampere, Finland: IEEE; p. 297–302. https://doi.org/10.1109/ICPS48405.2020.9274766
- Erasmus, J., Grefen, P., Vanderfeesten, I., & Traganos, K. (2018). Smart hybrid Manufacturing control using Cloud Computing and the Internet-of-Things. Machines, 6(4), 62. https://doi.org/10.3390/machines6040062
- Fleischmann, H., Kohl, J., & Franke, J. 2016. A modular web framework for socio-CPS-based condition monitoring. In: 2016 IEEE World Conference on Factory Communication Systems (WFCS). Aveiro, Portugal: IEEE; p. 1–8. https://doi.org/10.1109/WFCS.2016.7496509
- Franceschi, P., Mutti, S., Ottogalli, K., Rosquete, D., Borro, D., & Pedrocchi, N. (2022). A framework for cyber-physical production system management and digital twin feedback monitoring for fast failure recovery. International Journal of Computer Integrated Manufacturing, 35(6), 619–632. https://doi.org/10.1080/0951192X.2021.1992666
- Garcia, C. A., Garcia, M. V., Irisarri, E., Perez, F., Marcos, M., & Estevez, E. 2018. Flexible Container Platform Architecture for Industrial Robot Control. In: 2018 IEEE 23rd International Conference on Emerging Technologies and Factory Automation (ETFA). Turin: IEEE; p. 1056–1059. https://doi.org/10.1109/ETFA.2018.8502496
- Garcia, C. A., Montalvo-Lopez, W., & Garcia, M. V. (2020). Human-robot collaboration based on cyber-physical production system and mqtt. Procedia Manufacturing, 42, 315–321. https://doi.org/10.1016/j.promfg.2020.02.088
- Griffor, E. R., Greer, C., Wollman, D. A., & Burns, M. J. 2017. Framework for cyber-physical systems: Volume 1, overview. National Institute of Standards and Technology. Retrieved October 12, 2022. https://doi.org/10.6028/NIST.SP.1500-201.
- Guacapiña, A., Danny, Z., Cristian, T., María, V., & Carlos, P. (2020). Machine monitoring based on cyberphysical systems for industry 4.0. In M. Botto-Tobar, M. Zambrano Vizuete, & A. Díaz Cadena (Eds.), Innovation and research [internet] (Vol. 1277, pp. 117–127). Springer International Publishing. https://doi.org/10.1007/978-3-030-60467-7_10
- Gürdür, D., & Asplund, F. (2018). A systematic review to merge discourses: Interoperability, integration and cyber-physical systems. Journal of Industrial Information Integration, 9, 14–23. https://doi.org/10.1016/j.jii.2017.12.001
- Havard, V., Jeanne, B., Lacomblez, M., & Baudry, D. (2019). Digital twin and virtual reality: A co-simulation environment for design and assessment of industrial workstations. Production and Manufacturing Research, 7(1), 472–489. https://doi.org/10.1080/21693277.2019.1660283
- Hu, H., Jia, X., Liu, K., & Sun, B. (2020). Self-adaptive traffic control model with behavior trees and Reinforcement Learning for AGV in industry 4.0. IEEE Transaction Industrial Information, 17(12), 7968–7979. https://doi.org/10.1109/TII.2021.3059676
- Inigo, M. A., Porto, A., Kremer, B., Perez, A., Larrinaga, F., & Cuenca, J. 2020. Towards an Asset Administration Shell scenario: A use case for interoperability and standardization in industry 4.0. In: NOMS 2020 - 2020 IEEE/IFIP Network Operations and Management Symposium. Budapest, Hungary: IEEE; p. 1–6. https://doi.org/10.1109/NOMS47738.2020.9110410
- Jörg, S., Zarco, L., Rossmeissl, T., & Schlegel, T. 2019. Software control for a Cyber-physical system in a Manufacturing environment based on a Game Engine. In: 2019 Global IoT Summit (GIoTS). Aarhus, Denmark: IEEE; p. 1–7. https://doi.org/10.1109/GIOTS.2019.8766415
- Kapitonov, A., Berman, I., Bulatov, V., Lonshakov, S., & Krupenkin, A. 2018. Robonomics based on Blockchain as a principle of creating Smart Factories. In: 2018 Fifth International Conference on Internet of Things: Systems, Management and Security. Valencia: IEEE; p. 78–85. https://doi.org/10.1109/IoTSMS.2018.8554864
- Kattepur, A., Rath, H. K., Simha, A., & Mukherjee, A. 2018. Distributed optimization in multi-agent robotics for industry 4.0 warehouses. In: Proceedings of the 33rd Annual ACM Symposium on Applied Computing. Pau France: ACM; p. 808–815. https://doi.org/10.1145/3167132.3167221
- Khakifirooz, M., Cayard, D., Chien, C. F., & Fathi, M. 2018. A system dynamic model for implementation of industry 4.0. In: 2018 International Conference on System Science and Engineering (ICSSE). New Taipei: IEEE; p. 1–6. https://doi.org/10.1109/ICSSE.2018.8520101
- Khalid, A., Khan, Z. H., Idrees, M., Kirisci, P., Ghrairi, Z., Thoben, K.-D., & Pannek, J. (2022). Understanding vulnerabilities in cyber physical production systems. International Journal of Computer Integrated Manufacturing, 35(6), 569–582. https://doi.org/10.1080/0951192X.2021.1992656
- Khalid, A., Kirisci, P., Ghrairi, Z., Thoben, K.-D., & Pannek, J. (2016). A methodology to develop collaborative robotic cyber physical systems for production environments. Logist Res, 9(1), 23. https://doi.org/10.1007/s12159-016-0151-x
- Kitchenham, B. & Charters, S.(2007). Guidelines for performing systematic literature reviews in software engineering (Technical Report EBSE 2007-001). Keele University and Durham University Joint Report.
- Kleinman, Z. Boston Dynamics’ robot dog spot gets long-distance remote control (2021). BBC News [Internet]. Retrieved January 11, 2023. https://www.bbc.com/news/technology-55904565
- Lasi, H., Fettke, P., Kemper, H.-G., Feld, T., & Hoffmann, M. (2014). Industry 4.0. Business & Information Systems Engineering, 6(4), 239–242. https://doi.org/10.1007/s12599-014-0334-4
- Lee, J., Bagheri, B., & Kao, H.-A. (2015). A Cyber-physical systems architecture for industry 4.0-based manufacturing systems. Manufacturing Letters, 3, 18–23. https://doi.org/10.1016/j.mfglet.2014.12.001
- Lee, Y. K., Goh, Y. H., & Tew, Y. (2018). Cyber physical Autonomous Mobile robot (CPAMR) framework in the context of industry 4.0. In J. Detand & D. Ruxu (Eds.), MATEC web conf (Vol. 167, p. 02005). https://doi.org/10.1051/matecconf/201816702005
- Liao, Y., Deschamps, F., de FR, L. E., & Ramos, L. F. P. (2017). Past, present and future of industry 4.0 - a systematic literature review and research agenda proposal. International Journal of Production Research, 55(12), 3609–3629. https://doi.org/10.1080/00207543.2017.1308576
- Lichte, D. & Wolf, K. 2018. Use case-based consideration of safety and security in cyber physical production systems applied to a collaborative robot system. Proceedings of European Safety and Reliability Conference (ESREL).
- Liu, Q., Hua, P., Sultan, A., Shen, L., Mueller, E., & Boerner, F. 2019. Study of the integration of Robot in Cyber-physical production systems. In: 2019 International Conference on Cyber-Enabled Distributed Computing and Knowledge Discovery (CyberC). Guilin, China: IEEE; p. 367–370. https://doi.org/10.1109/CyberC.2019.00069
- Liu, J., & Liu, Z. (2019). A survey on security verification of Blockchain Smart contracts. Institute of Electrical and Electronics Engineers Access, 7, 77894–77904. https://doi.org/10.1109/ACCESS.2019.2921624
- Luo, Y., Duan, Y., Li, W., Pace, P., & Fortino, G. (2018). Workshop Networks integration using Mobile Intelligence in smart factories. IEEE Communications Magazine, 56(2), 68–75. https://doi.org/10.1109/MCOM.2018.1700618
- Malik, A. A., & Bilberg, A. (2018). Digital twins of human robot collaboration in a production setting. Procedia Manufacturing, 17, 278–285. https://doi.org/10.1016/j.promfg.2018.10.047
- Marcheras, D., Ayaida, M., Messai, N., & Valentin, F. 2020. A new middleware for managing heterogeneous robot in ubiquitous environments. In: 2020 8th International Conference on Wireless Networks and Mobile Communications (WINCOM). Reims, France: IEEE; p. 1–5. https://doi.org/10.1109/WINCOM50532.2020.9272477
- Maschler, B., Braun, D., Jazdi, N., & Weyrich, M. (2021). Transfer learning as an enabler of the intelligent digital twin. Procedia CIRP, 100, 127–132. https://doi.org/10.1016/j.procir.2021.05.020
- Michniewicz, J., & Reinhart, G. (2014). Cyber-physical Robotics – Automated analysis, programming and configuration of robot cells based on Cyber-physical-systems. Procedia Technology, 15, 566–575. https://doi.org/10.1016/j.protcy.2014.09.017
- Monostori, L., Kádár, B., Bauernhansl, T., Kondoh, S., Kumara, S., Reinhart, G., Sauer, O., Schuh, G., Sihn, W., & Ueda, K. (2016). Cyber-physical systems in manufacturing. CIRP Annals, 65(2), 621–641. https://doi.org/10.1016/j.cirp.2016.06.005
- Muccini, H., Sharaf, M., & Weyns, D. 2016. Self-adaptation for cyber-physical systems: A systematic literature review. In: Proceedings of the 11th international symposium on software engineering for adaptive and self-managing systems, Austin, Texas (pp. 75–81).
- Müller, T., Kamm, S., Löcklin, A., White, D., Mellinger, M., Jazdi, N., & Weyrich, M. (2022). Architecture and knowledge modelling for self-organized reconfiguration management of cyber-physical production systems. International Journal of Computer Integrated Manufacturing, 1–22. https://doi.org/10.1080/0951192X.2022.2121425
- Nakayama, R. S., de Mesquita Spínola, M., & Silva, J. R. (2020). Towards I4.0: A comprehensive analysis of evolution from I3.0. Computers & Industrial Engineering, 144, 106453. https://doi.org/10.1016/j.cie.2020.106453
- Negri, E., Fumagalli, L., & Macchi, M. (2017). A review of the roles of Digital twin in CPS-based production systems. Procedia Manufacturing, 11, 939–948. https://doi.org/10.1016/j.promfg.2017.07.198
- Niati, A., Selma, C., Tamzalit, D., Bruneliere, H., Mebarki, N., & Cardin, O. 2020. Towards a digital twin for cyber-physical production systems: A multi-paradigm modeling approach in the postal industry. In: Proceedings of the 23rd ACM/IEEE International Conference on Model Driven Engineering Languages and Systems: Companion Proceedings. Virtual Event Canada: ACM; p. 1–7. https://doi.org/10.1145/3417990.3421438
- Nie, Z., & Chen, K.-C. (2022). Hypergraphical real-time multirobot task allocation in a Smart Factory. IEEE Transaction Industrial Information, 18(9), 6047–6056. https://doi.org/10.1109/TII.2021.3135297
- Onaji, I., Tiwari, D., Soulatiantork, P., Song, B., & Tiwari, A. 2022. Digital twin in manufacturing: Conceptual framework and case studies. International Journal of Computer Integrated Manufacturing:1–28.
- Osterrieder, P., Budde, L., & Friedli, T. (2020). The smart factory as a key construct of industry 4.0: A systematic literature review. International Journal of Production Economics, 221, 107476. https://doi.org/10.1016/j.ijpe.2019.08.011
- Pantano, M., Regulin, D., Lutz, B., & Lee, D. (2020). A human-cyber-physical system approach to lean automation using an industrie 4.0 reference architecture. Procedia Manufacturing, 51, 1082–1090. https://doi.org/10.1016/j.promfg.2020.10.152
- Paschou, T., Rapaccini, M., Adrodegari, F. & Saccani, N.(2020). Digital servitization in manufacturing: A systematic literature review and research agenda. Industrial Marketing Management, [Internet]. https://doi.org/10.1016/j.indmarman.2020.02.012
- Peres, R. S., Jia, X., Lee, J., Sun, K., Colombo, A. W., & Barata, J. (2020). Industrial Artificial Intelligence in industry 4.0 - systematic review, challenges and outlook. Systematic Review, Challenges and Outlook IEEE Access, 8, 220121–220139. https://doi.org/10.1109/ACCESS.2020.3042874
- Pérez, L., Rodríguez-Jiménez, S., Rodríguez, N., Usamentiaga, R., & García, D. F. (2020). Digital twin and Virtual Reality based methodology for multi-robot Manufacturing cell commissioning. Applied Sciences, 10(10), 3633. https://doi.org/10.3390/app10103633
- Petersen, K., Vakkalanka, S., & Kuzniarz, L. (2015). Guidelines for conducting systematic mapping studies in software engineering: An update. Information and Software Technology, 64, 1–18. https://doi.org/10.1016/j.infsof.2015.03.007
- Piccarozzi, M., Aquilani, B., & Gatti, C. (2018). Industry 4.0 in management studies: A systematic literature review. Sustainability, 10(10), 3821. https://doi.org/10.3390/su10103821
- Pires, F., Ahmad, B., Moreira, A. P., & Leitao, P. 2021. Digital twin based what-if simulation for energy management. In: 2021 4th IEEE International Conference on Industrial Cyber-Physical Systems (ICPS). Victoria, BC, Canada: IEEE; p. 309–314. https://doi.org/10.1109/ICPS49255.2021.9468224
- Pivoto, D. G. S., de Almeida, L. F. F., da Rosa Righi, R., Rodrigues, J. J. P. C., Lugli, A. B., & Alberti, A. M. (2021). Cyber-physical systems architectures for industrial internet of things applications in industry 4.0: A literature review. Journal of Manufacturing Systems, 58, 176–192. https://doi.org/10.1016/j.jmsy.2020.11.017
- Pogliani, M., Quarta, D., Polino, M., Vittone, M., Maggi, F., & Zanero, S. (2019). Security of controlled manufacturing systems in the connected factory: The case of industrial robots. J Comput Virol Hack Tech, 15(3), 161–175. https://doi.org/10.1007/s11416-019-00329-8
- Priggemeyer, M., & Rossmann, J. 2018. Simulation-based control of reconfigurable robotic workcells: Interactive planning and execution of processes in cyber-physical systems. In: ISR 2018; 50th International Symposium on Robotics, Munich, Germany: Vde (pp. 1–8).
- Priggemeyer, M., & Rossmann, J. (2020). Structure of an industry 4.0 compliant architecture component for the development of simulation-based control applications in Cyber-physical systems. In ISR 2020; 52th International Symposium on Robotics, Stuttgart, Germany (pp. 1–6). VDE.
- Radanliev, P., De Roure, D., Van Kleek, M., Santos, O., & Ani, U. (2021). Artificial intelligence in cyber physical systems. AI & Soc, 36(3), 783–796. https://doi.org/10.1007/s00146-020-01049-0
- Rahman, A., Jin, J., Cricenti, A. L., Rahman, A., & Kulkarni, A. (2019). Communication-Aware Cloud Robotic Task Offloading With On-Demand Mobility for Smart Factory Maintenance. IEEE Transactions on Industrial Informatics, 15(5), 2500–2511. https://doi.org/10.1109/TII.2018.2874693
- Rajkumar, R., Lee, I., Sha, L., & Stankovic, J. 2010. Cyber-physical systems: The next computing revolution. In: Proceedings of the 47th Design Automation Conference on - DAC ’10. Anaheim, California: ACM Press; p. 731. https://doi.org/10.1145/1837274.1837461
- Rocca, R., Rosa, P., Sassanelli, C., Fumagalli, L., & Terzi, S. (2020). Integrating Virtual Reality and Digital twin in circular economy practices: A laboratory application case. Sustainability, 12(6), 2286. https://doi.org/10.3390/su12062286
- Rodriguez, I., Mogensen, R. S., Fink, A., Raunholt, T., Markussen, S., Christensen, P. H., Berardinelli, G., Mogensen, P., Schou, C., & Madsen, O. (2021). An experimental framework for 5G wireless system integration into industry 4.0 applications. Energies, 14(15), 4444. https://doi.org/10.3390/en14154444
- Rojas, R. A., & Rauch, E. (2019). From a literature review to a conceptual framework of enablers for smart manufacturing control. The International Journal, Advanced Manufacturing Technology, 104(1–4), 517–533. https://doi.org/10.1007/s00170-019-03854-4
- Rosado, O. G., & PFMJ, V. (2021). Distributed adaptive control: An ideal cognitive architecture Candidate for managing a robotic recycling plant. In V. Vouloutsi, A. Mura, F. Tauber, T. Speck, T. Prescott, & P. Verschure (Eds.), Biomimetic and biohybrid systems (Vol. 12413, pp. 153–164). Springer International Publishing. https://doi.org/10.1007/978-3-030-64313-3_16
- Rubmann, M., Lorenz, M., Gerbert, P., Waldner, M., Justus, J., Engel, P., & Harnisch, M.(2015). Industry 4.0: World economic forum. Bost Consult Gr.:1–20.
- Sajjad, A., Ahmad, W., Hussain, S., & Mehmood, R. M. (2021). Development of innovative operational flexibility measurement model for Smart systems in industry 4.0 paradigm. Institute of Electrical and Electronics Engineers Access, 10, 6760–6774. https://doi.org/10.1109/ACCESS.2021.3139544
- Sassanelli, C., Rosa, P., & Terzi, S. (2021). Supporting disassembly processes through simulation tools: A systematic literature review with a focus on printed circuit boards. Journal of Manufacturing Systems, 60, 429–448. https://doi.org/10.1016/j.jmsy.2021.07.009
- Sassanelli, C., Rossi, M., & Terzi, S. (2020). Evaluating the smart maturity of manufacturing companies along the product development process to set a PLM project roadmap. IJPLM, 12(3), 185. https://doi.org/10.1504/IJPLM.2020.109789
- Sassanelli, C., & Terzi, S. (2022). The D-BEST reference Model: A flexible and sustainable support for the Digital Transformation of Small and Medium Enterprises. Global Journal of Flexible Systems Management, Springer;global Institute of Flexible Systems Management, 23(3), 345–370.
- Seder, M., Petrović, L., Peršić, J., Popović, G., Petković, T., Šelek, A., Bićanić, B., Cvišić, I., Josić, D., Marković, I., Petković, I., & Muhammad, A. (2019). Open Platform Based Mobile Robot Control for Automation in Manufacturing Logistics. IFAC-Papersonline, 52(22), 95–100. https://doi.org/10.1016/j.ifacol.2019.11.055
- Shu, B., Sziebig, G., & Solvang, B. (2018). Introduction of Cyber-physical system in robotized Press-brake line for metal industry. In K. Wang, Y. Wang, J. Strandhagen, & T. Yu (Eds.), Advanced Manufacturing and automation VII (Vol. 451, pp. 181–186). Springer Singapore. https://doi.org/10.1007/978-981-10-5768-7_20
- Silva, M., Martins de Sousa, F., Barbosa, D., & Oliveira, R. 2020. Constraints and challenges in designing applications for industry 4.0: A functional approach: In: Proceedings of the 22nd International Conference on Enterprise Information Systems. Prague, Czech Republic: SCITEPRESS - Science and Technology Publications; p. 767–774. https://doi.org/10.5220/0009570307670774
- Smirnov, A., & Kashevnik, A. (2018). Semantic interoperability for coalition creation by Mobile Robots and humans: An approach and case study. IFAC-Papersonline, 51(11), 1409–1414. https://doi.org/10.1016/j.ifacol.2018.08.319
- Smith, R. G. (1980). The contract net protocol: High-level communication and control in a distributed problem solver. IEEE Transactions on Computers, 29(12), 1104–1113. https://doi.org/10.1109/TC.1980.1675516
- Szabo, G., Racz, S., Reider, N., Munz, H. A., & Peto, J. 2019. Digital twin: Network Provisioning of Mission Critical communication in Cyber physical production systems. In: 2019 IEEE International Conference on Industry 40, Artificial Intelligence, and Communications Technology (IAICT). BALI, Indonesia: IEEE; p. 37–43. https://doi.org/10.1109/ICIAICT.2019.8784852
- Tang, D., Zheng, K., Zhang, H., Sang, Z., Zhang, Z., Xu, C., Espinosa-Oviedo, J. A., Vargas-Solar, G., & Zechinelli-Martini, J.-L. (2016). Using Autonomous Intelligence to build a Smart shop floor. Procedia CIRP, 56, 354–359. https://doi.org/10.1016/j.procir.2016.10.039
- Tan, Q., Tong, Y., Wu, S., & Li, D. (2020). Towards a next-generation production system for industrial robots: A CPS-based hybrid architecture for smart assembly shop floors with closed-loop dynamic cyber physical interactions. Frontiers of Mechanical Engineering, 15(1), 1–11. https://doi.org/10.1007/s11465-019-0563-9
- Trappey, A. J. C., Trappey, C. V., Govindarajan, U. H., Sun, J. J., & Chuang, A. C. (2016). A review of technology standards and patent portfolios for enabling Cyber-physical systems in advanced Manufacturing. Institute of Electrical and Electronics Engineers Access, 4, 7356–7382. https://doi.org/10.1109/ACCESS.2016.2619360
- Turner, C. J., Hutabarat, W., Oyekan, J., & Tiwari, A. (2016). Discrete Event simulation and Virtual Reality use in industry: New opportunities and future trends. IEEE Trans Human-Mach Syst, 46(6), 882–894. https://doi.org/10.1109/THMS.2016.2596099
- Vicente, L., Lomelino, P., Carreira, F., Campos, F. M., MJGC, M., Osório, A. L., & Calado, J. M. F. (2021). Industrial collaborative Robotics Platform. In L. Camarinha-Matos, X. Boucher, & H. Afsarmanesh (Eds.), Smart and sustainable collaborative networks 40 (Vol. 629, pp. 567–576). Springer International Publishing. https://doi.org/10.1007/978-3-030-85969-5_53
- Vladareanu, L., Vladareanu, V., Gal, A. I., Melinte, O. D., Pandelea, M., Radulescu, M., & Ciocîrlan, A.-C. (2020). Digital twin in 5G Digital era developed through Cyber physical systems. IFAC-Papersonline, 53(2), 10885–10890. https://doi.org/10.1016/j.ifacol.2020.12.2822
- Vrchota, J., Pech, M., Rolínek, L., & Bednář, J. (2020). Sustainability outcomes of green processes in relation to industry 4.0 in Manufacturing: Systematic review. Sustainability, 12(15), 5968. https://doi.org/10.3390/su12155968
- Wan, J., Chen, B., Wang, S., Xia, M., Li, D., & Liu, C. (2018). Fog Computing for energy-Aware load Balancing and scheduling in Smart Factory. IEEE Transaction Industrial Information, 14(10), 4548–4556. https://doi.org/10.1109/TII.2018.2818932
- Wang, S., Wan, J., Zhang, D., Li, D., & Zhang, C. (2016). Towards smart factory for industry 4.0: A self-organized multi-agent system with big data based feedback and coordination. Computer Networks, 101, 158–168. https://doi.org/10.1016/j.comnet.2015.12.017
- Wilhelm, J., Petzoldt, C., Beinke, T., & Freitag, M. (2021). Review of Digital twin-based interaction in Smart Manufacturing: Enabling Cyber-physical systems for human-Machine interaction. International Journal of Computer Integrated Manufacturing, 34(10), 1031–1048. https://doi.org/10.1080/0951192X.2021.1963482
- Winkelhaus, S., & Grosse, E. H. (2020). Logistics 4.0: A systematic review towards a new logistics system. International Journal of Production Research, 58(1), 18–43. https://doi.org/10.1080/00207543.2019.1612964
- Xia, K., Sacco, C., Kirkpatrick, M., Saidy, C., Nguyen, L., Kircaliali, A., & Harik, R. (2021). A digital twin to train deep reinforcement learning agent for smart manufacturing plants: Environment, interfaces and intelligence. Journal of Manufacturing Systems, 58, 210–230. https://doi.org/10.1016/j.jmsy.2020.06.012
- Xu, W., Cui, J., Li, L., Yao, B., Tian, S., & Zhou, Z. (2021). Digital twin-based industrial cloud robotics: Framework, control approach and implementation. Journal of Manufacturing Systems, 58, 196–209. https://doi.org/10.1016/j.jmsy.2020.07.013
- Yang, F.-N., Wu, C.-Y., & Lin, H.-Y. 2018. Design and implementation of CPS-Based automated management Platform. In: 2018 IEEE International Conference on Systems, Man, and Cybernetics (SMC). Miyazaki, Japan: IEEE; p. 2293–2298. https://doi.org/10.1109/SMC.2018.00394
- Yao, B., Zhou, Z., Wang, L., Xu, W., Yan, J., & Liu, Q. (2018). A function block based cyber-physical production system for physical human–robot interaction. Journal of Manufacturing Systems, 48, 12–23. https://doi.org/10.1016/j.jmsy.2018.04.010
- Ye, X., Hong, S. H., Song, W. S., Kim, Y. C., & Zhang, X. (2021). An industry 4.0 Asset Administration Shell-Enabled Digital solution for Robot-based Manufacturing systems. Institute of Electrical and Electronics Engineers Access, 9, 154448–154459. https://doi.org/10.1109/ACCESS.2021.3128580
- Zaugg, H., West, R. E., Tateishi, I., & Randall, D. L. (2011). Mendeley: Creating communities of scholarly inquiry through research collaboration. Techtrends Tech Trends, 55(1), 32–36. https://doi.org/10.1007/s11528-011-0467-y
- Zhang, L. 2018. Specification and design of Cyber physical systems based on system of systems Engineering approach. In: 2018 17th International Symposium on Distributed Computing and Applications for Business Engineering and Science (DCABES). Wuxi, China: IEEE; p. 300–303. https://doi.org/10.1109/DCABES.2018.00084
- Zhang, Z., Wang, X., Zhu, X., Cao, Q., & Tao, F. (2019). Cloud manufacturing paradigm with ubiquitous robotic system for product customization. Robotics and Computer-Integrated Manufacturing, 60, 12–22. https://doi.org/10.1016/j.rcim.2019.05.015
- Zhang, C., Zhou, G., He, J., Li, Z., & Cheng, W. (2019). A data- and knowledge-driven framework for digital twin manufacturing cell. Procedia CIRP, 83, 345–350. https://doi.org/10.1016/j.procir.2019.04.084
- Zhao, R., Tao, X., Conzon, D., Ferrera, E., & Yu, Y. (2020). A cross-Platform communication Mechanism for ROS-Based Cyber-physical system. ( [place unknown]). SAM IoT.
- Zhuang, C., Miao, T., Liu, J., & Xiong, H. (2021). The connotation of digital twin, and the construction and application method of shop-floor digital twin. Robotics and Computer-Integrated Manufacturing, 68, 102075. https://doi.org/10.1016/j.rcim.2020.102075
- Zug, S., Wilske, S., Steup, C., & Luder, A. 2015. Online evaluation of manipulation tasks for mobile robots in industry 4.0 scenarios. In: 2015 IEEE 20th Conference on Emerging Technologies & Factory Automation (ETFA). Luxembourg, Luxembourg: IEEE; p. 1–7. https://doi.org/10.1109/ETFA.2015.7301455