
 ?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.
?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.Abstract
The problem of flocking and formation of a group of nonholonomic wheeled mobile robot is addressed in this paper. Based on the cascade structure of the kinematic model, two kinematic controllers are proposed to achieve formation and flocking behaviors. The proposed control laws present a P and PI-like structure plus a feedforward term and do not require complex calculations. The interaction between the robots is modeled using graph theory. The performance of the proposed control laws is validated by experimental tests on a group of four differential-drive wheeled mobile robots.
PUBLIC INTEREST STATEMENT
Flocking and formation are two collective behaviors widely observed in nature. Flocking emerges when a collection of individuals travel in a compact group, and due their interactions, all members of the flock acquire same velocity without colliding. Bird flocks and fish schools are typical examples. By the other hand, formation is a special case of flocking, in which the motion of the whole group is made with an specific position configuration of each member. In this case, position matters, but in flocking does not. This paper proposes simple control strategies to produce this behaviors in groups of wheeled mobile robots. Mathematical fundaments are provided and some experiments with real robots serve as proof of applicability of the proposed control algorithms.
1. Introduction
Collective behaviors in nature, such as a flock of birds, school of fish, and insect swarming for mention a few, have attracted the attention of several researchers from different disciplines in the last decades (Beaver & Malikopoulos, Citation2021; De Kerckhove & Shuter, Citation2022; Moshtagh & Jadbabaie, Citation2007; Parrish et al., Citation2002; Toner & Tu, Citation1998). These behaviors serve as inspiration for robotic systems composed of multiple agents. A group of robots can perform more complex tasks and, in many cases, in a more efficient manner than a single robot, this due to the inherent robustness and simultaneous task completion e.g., surveillance, exploration and rescue missions, mapping, large object transportation, etc.
Among natural collective behaviors, flocking is a widely observed phenomenon. It can be achieved by flocks of birds, schools of fish, locust swarms, or land animal herds in a stampede. The key feature of this behavior consists of reaching a common displacement direction on a compact group, while avoiding collision among members of the flock. It is mainly observed as an evasion mechanism under predator attacks or as a food seeking strategy.
Since Reynolds worked with the entities he called Bloids (Reynolds, Citation1987), this collective behavior is simulated by means of artificial agents, being computational agents and more recently mobile robots the preferred test beds. For this purpose, flocking can be stated as the problem for a group of robots navigating over a workspace with common orientation and velocity (Francis & Maggiore, Citation2016). In recent years, flocking and formation are addressed taking into account self-organizing techniques, such as in Ban et al. (Citation2021) and Z. Liu et al. (Citation2021). However, the bulk of research on flocking, consensus, and formation control for robot networks was done relying on graph theory and considering that each agent has simple dynamics, such as the single and double integrator models (Cao et al., Citation2011; Dörfler & Francis, Citation2010; Olfati-Saber, Citation2006; Ren et al., Citation2007; Sun et al., Citation2017). In Rozenheck et al. (Citation2015), a proportional-integral control for distance-formation is proposed for agents with single integrator dynamics. A finite-time control law that achieves formation and flocking for agents modeled by single and double integrators is presented in Sun et al. (Citation2015).
However, most of wheeled mobile robots are designed under differential drive structure, mostly by its simplicity and well-known kinematics. This brings a new challenge due its nonholonomic constraints, i.e., the pure rolling and non-slipping of its wheels. This is important to consider when designing a kinematic controller, thus, as Brockett (Citation1983) stated, there is no linear controller that can stabilize a system under nonholonomic constraints. This is the reason that makes simple dynamics controllers non-directly applicable to these systems.
Autonomous Underwater Vehicles (AUVs) are, among mobile robots, a challenging rover due to their highly perturbed environment. In that sense, a flocking algorithm based on sliding mode control is proposed in Subudhi et al. (Citation2017) to cope with the perturbations of the environment. On the other hand, in Sahu and Subudhi (Citation2017) the authors preferred to rely on fuzzy logic to design a robust obstacle avoidance flocking algorithm. The two cases above only presented numerical results.
In recent years, Unmanned Aerial Vehicles (UAVs) are selected as swarming test beds. As an example, Qiu and Duan (Citation2020) designed a pigeon-inspired optimization algorithm for flocking. The advantages of these algorithms are that they rely on self-organization and local neighbor information, eliminating the necessity of a graph-based communication scheme. This scenario increases the robustness of the flock and adds flexibility to the group formation. A similar self-organized approach is carried out in Dai et al. (Citation2019) where the authors succeed in implementing their flocking algorithm to achieve formation flight of commercial UAVs.
Finally, wheeled mobile robots are by far the most employed robots to test multi-agent controllers. The work of Regmi et al. (Citation2005) presents experimental results on a group of unicycle wheeled mobile robots that validate the flocking control law reported in Tanner et al. (Citation2003). Since the controller was designed for the double integrator model, the authors used the look-ahead concept to transform each robot’s dynamic model into a second order linear system.
The feedback linearization control technique allows us to extend the aforementioned approaches for the case of agents with nonlinear dynamics, e.g., aircraft, robot manipulators, omnidirectional mobile robots (Chung & Slotine, Citation2009; Ren & Beard, Citation2004). Nevertheless, this control approach often leads to unnecessary dynamics cancellations and cannot be directly applied for nonholonomic and underactuated systems such as differential-drive wheeled mobile robots.
Valbuena-Reyes and Tanner (Citation2014) proposed three controllers to solve the formation, flocking, and path following problems for a team of nonholonomic mobile robots. The controllers were designed based on the input-output linearization technique. To solve the formation problem, the authors proposed a nonsmooth artificial vector field. A novel flocking control based on backstepping is proposed in Dong (Citation2011). Both the control law and stability analysis take into account the nonholonomic constraints of the agents and constant communication delays. The performance of the flocking control law was validated only by numerical simulations. A formation and velocity tracking control law based on the port-Hamiltonian approach for a group of nonholonomic wheeled robots is proposed in Vos et al. (Citation2016). The dynamic model of the wheeled robots was taken into account and the interconnections between robots were modeled as virtual springs and dampers. The developed theory was validated by means of experimental results on a commercial mobile robot. Furthermore, in Liu et al. (Citation2019) the authors combined kinematic and dynamic analysis to obtain a adaptive consensus tracking control law, which enables a group of nonholonomic wheeled mobile robots to converge to a reference velocity trajectory, as in flocking problem. In contrast, in Liu et al. (Citation2020) the authors employed the polar coordinate representation of a WMR with a sliding mode controller, which helps to avoid the singularity at of the polar representation, in order to cope with the same consensus tracking problem of multiple nonholonomic wheeled mobile robots.
On the other hand, Lyapunov-based control schemes that achieve formation, attitude synchronization, and trajectory tracking on a network composed of nonholonomic mobile inverted pendulum robots are proposed in Saradagi et al. (Citation2017). The communication between robots is modeled by undirected weighted graphs. The performance of the controllers was experimentally validated on a group of three robots. A discontinuous flocking control for nonholonomic agents is presented in Zhao et al. (Citation2017). The control approach is based on a virtual leader but it is assumed that only a set of the agents know the states of the leader. The problem of flocking and target interception for multiple nonholonomic kinematic agents is addressed in Khaleidan et al. (Citation2019). It is assumed that only a portion of the agents knows the desired velocity. Therefore, a variable structure velocity observer is proposed. Experimental results are presented to validate the control-observer approach.
In this paper, two kinematic control laws are proposed for a group of nonholonomic wheeled mobile robots. The first control law achieves flocking behavior, i.e., each robot’s Cartesian velocity converges asymptotically to a common reference velocity while maintaining the desired distance between each member of the group. The second one is designed to achieve formation behavior. The mobile robots asymptotically track the desired trajectory and, at the same time, keeping a desired geometric shape. Moreover, the proposed controllers guarantee that the robots converge to the same orientation.
In order to design the kinematic controllers, the cascade structure of the robot’s kinematic model is exploited. This allows a proposal of a virtual control input for the position-subsystem. The function of the virtual control input is twofold. First, it enables us to analyze the position-subsystem as a complete actuated system, and second, it gives the desired orientation for the attitude-subsystem. The stability of the closed-loop systems is carried out by means of the Lyapunov theory and the properties of interconnected time-varying systems. On the other hand, the interactions between robots are described by the Laplacian matrix. The main contribution of the paper is the introduction of two novel control laws with a P and PI-like structure for the flocking and formation problems where each agent is a nonholonomic mobile robot. The nonholonomic kinematic model is more realistic than the single and double integrators models and introduces additional control challenges. The proposed attitude controller is simpler than the ones reported in Dong (Citation2011) and Khaleidan et al. (Citation2019) since the inverse of the tangent function is not required for implementation.
The outline of the paper is organized as follows: The kinematical model of a nonholonomic mobile robot and the mathematical preliminaries are given in Section 2. The flocking and formation control laws with their corresponding stability analysis are presented in Sections 3 and 4. Section 5 presents experimental results that validate the performance of the proposed control laws. The paper ends in Section 6 where concluding remarks and future research directions are given.
2. Preliminaries
Consider a group of wheeled mobile robots whose kinematic model is given by
where and
are the Cartesian position and orientation of the mobile robot, the unit vector
denotes the direction of the robot’s linear velocity. Finally,
and
are the forward and steering velocities, respectively. The motion of each robot satisfies the nonholonomic constraint
The previous constraint implies that the mobile robot cannot move sideways.
The system (1) is underactuated, i.e., it has three degrees of freedom (,
) but only two control inputs (
,
). In order to overcome this problem, consider the virtual control input
where is the desired direction of the robot’s linear velocity. Based on (3) the translational part of kinematic model (1) can be written as
In this case, system (4) can be analyzed as a completely actuated system and can be treated as a perturbation term. According to the definition of
, its time derivative is given by
where is the desired angular velocity and
is a skew-symmetric matrix. From the previous equation one has
On the other hand, given the control input , the desired direction
and the forward velocity
can be computed as follows
The interaction and communication of each robot can be properly described by a graph with the set of nodes
and the set of edges
. One of the preferred representations of a graph is by means of its adjacency matrix
which its elements are defined as
Another useful mathematical representation of a graph is the Laplacian matrix defined as
where is the degree matrix. By construction, the Laplacian has the right eigenvector
associated to the eigenvalue
. For a connected graph, the algebraic multiplicity of
is one and thus
(see, Olfati-Saber (Citation2006); Ren et al. (Citation2007) for further details).
3. Flocking control algorithm
The control objective is to design the control inputs and
such that the group of mobile robots follows a common reference velocity while maintaining a constant distance between them. To this end, the velocity and orientation errors are defined as
where is the desired velocity of the group and
is the desired orientation for each robot. By taking into account (1) and (4) one has
On the other hand, by using trigonometric identities the term can be expressed as
where is a rotation matrix. The proposed flocking control laws are given by
where and
are positive control gains,
denotes the distance between the
-th robot with its
-th neighbor, and
is the desired distance between the robots. The desired orientation
and desired angular velocity
are computed according to (7) and (6), respectively. By substituting the control law (12)-(13) into (10) we obtain the translational closed-loop system given by
where
and the attitude closed-loop dynamics described by
Note that the attitude closed-loop dynamics is decoupled from the translational one. Thus, the whole closed-loop dynamics (14)-(16) can be analyzed as an interconnected system with as the interconnection term. Before presenting the main results of the paper, let us recall the following results regarding the stability of interconnected time-varying systems and the notion of input-to-state stability (Khalil, Citation2002).
Lemma 3.1. Consider the system where
is globally Lipschitz in (
,
), uniformly in
. If the unforced system
has a globally exponentially stable equilibrium point at
, then the system is input-to-state stable (ISS).
Lemma 3.2. Consider the interconnected system
if the subsystem (17) with as input is ISS and
is a uniformly asymptotically stable equilibrium point of the subsystem (18), then, the origin (
) = (
) of the interconnected system (17)-(18) is uniformly asymptotically stable.
Proposition 3.3. Assume that the graph is connected and
. Then, the control laws given in (12) and (13) achieve flocking behavior for a group of nonholonomic wheeled mobile robots described by (1), i.e.,
and
as
.
Proof. For stability analysis, the tracking error is defined as , where
and
is a desired constant offset; in this case, one has
. Based on the previous definition, the closed-loop dynamics becomes
where . It will be shown that if
converges asymptotically to zero, then,
and
as
. To this end, we analyze (20) and (24) as an interconnected system. According to Lemma 3.2, we need to show that the subsystem (24) is ISS with input
. On the other hand, from Lemma 3.1 the subsystem (24) will be ISS if the origin of the unforced subsystem
is globally uniformly exponentially stable. As stated in (Nuño et al., Citation2011), for a connected graph the reduce Laplacian
is Hurwitz. Therefore, the matrix
is also Hurwitz. Thus,
is a globally uniformly exponentially stable equilibrium point.
Next, we need to prove that is a uniformly asymptotically equilibrium point for the subsystem (20). Consequently, consider the Lyapunov candidate function
whose time derivative along (20) is given by
Therefore, the equilibrium point is locally uniformly asymptotically stable. Moreover, there exists a positive constant
such that
Thus, is also locally uniformly exponentially stable. The previous analysis shows that (20) and (24) satisfy the conditions of Lemma 3.2, thus, it is concluded that
is a uniformly asymptotically equilibrium point for the interconnected system (20)-(24). Therefore,
as
, and from (23) one has
for some
. This in turn implies that
,
, thus,
which implies that
as
. The previous result shows that the robots maintain a desired constant distance between them.
On the other hand, based on the previous definitions the control input (12) can be expressed as
where . In addition from (7) one has
where . An upper bound of (27) is given by
where ,
, and
. Clearly, from (7) and (27) it follows
. By taking into account Equationequations (15)
(15)
(15) , (Equation29
(29)
(29) ), and the following inequalities
,
,
an upper bound of
is given by
for some . The interconnection term has a linear growth with respect to
. Since
satisfies (30) and
converges asymptotically to zero, it follows
as
. Finally, for a large enough time (21) becomes
which implies that as
. This completes the proof.
4. Formation control algorithm
In this case, the objective is to design the control inputs and
such that each robot follows a desired trajectory while the group of robots maintains a desired geometric structure. The tracking errors are defined as
where is a desired constant vector and
is the desired trajectory for group of mobile robots. The function of
is twofold. First,
is used to avoid collisions, and second, it also defines the geometry of the formation. In this sense, it is important that the designer considers carefully the values of
in order to determine the final formation shape. A remark to notice, the position of the robots is referred to the center of the wheels axis in each robot, so,
should consider the physical dimensions of the robot, to avoid collisions.
Proposition 4.1. Assume that the graph is connected and
. Then, the following formation control laws
achieve trajectory tracking and formation for a group of nonholonomic wheeled mobile robots, i.e., and
as
Proof. By taking into account (1) and (4) the time derivatives of the tracking errors are given by
By substituting the control laws (33)-(35) into (36) yields
with . Previous equations describe the closed-loop dynamics of the system. In the same fashion as the flocking case, the translational part of the closed-loop dynamics (37) and (38) can be written in compact form as follows
where and
where is a zero matrix with proper dimensions. Similar to the proof of Proposition 3.3, we will exploit the cascade structure of (39) and (40) to prove that
,
, and
converge asymptotically to zero. Since the matrix
is Hurwitz for a connected graph, it can be proved that
is also Hurwitz. As result,
is a globally uniformly exponentially stable equilibrium point for the unforced subsystem
. Therefore, the subsystem (40) with input
is ISS.
In Proposition 3.3 it was shown that the origin of (39) is locally uniformly exponentially stable. The closed-loop dynamics (39) and (40) satisfiy the condition of Lemma 3.2, thus, () = (
) is a uniformly asymptotically equilibrium point of the interconnected system (39)-(40). Therefore,
and
converge asymptotically to zero.
Remark 1. Notice that in (32) can be a time-variant distance vector. Then, the formation control law (33) becomes
A time-variant distance vector allows the group of mobile robots to change the shape of the formation and it can be used for instance, to pass through narrow spaces or to avoid obstacles.
5. Experimental results
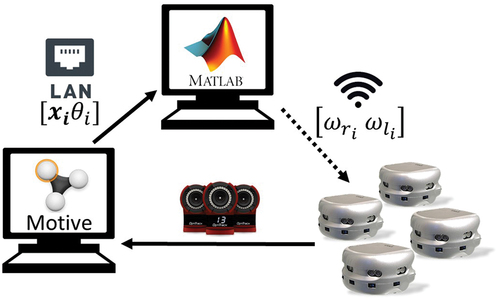
In this section, we present experimental results that validate the theory presented in Sections 3 and 4. The robotic swarm testbed is composed of four Khepera III robots from K-Team (see, Figure ). Each robot has two driven wheels actuated by a DC motor and equipped with an incremental encoder. The angular velocity of the robots’ wheels is controlled by a pre-tuned PID controller. The position and orientation (i.e. posture) of each robot was measured by means of a vision system composed of eight Optitrack Cameras connected to a computer running MOTIVE software. The control algorithms were implemented in another computer running MATLAB. Motive acquired the posture of all the robots and transmitted them to the computer with Matlab through TCP/IP protocol by means of a Local Area Network (LAN). Then, Matlab computed the control signals for a given sample period and sent them to the robots by means of a Wi-Fi communication channel (see, Figure ).
Figure 1. Khepera robots.
Figure 2. Experimental testbed.
The angular velocities of the wheels denoted by and
are related to
and
by the following one-to-one relationship
where is the radius of the wheel and
is the distance between the wheels with
.
The interaction between the robots is depicted in Figure which can be described by the following Laplacian matrix
Figure 3. Graph of the interactions between robots in the flocking experiment.
The time derivative of which is needed to compute
is given by
To reduce computational burden, the time derivative of is approximated by the first order filter
where ɛ is a small positive constant.
5.1. Flocking experiment
In order to assess the performance of the flocking controller, the desired Cartesian velocity for the robots is a step signal given by
After 7 seconds the desired velocity changes of direction. This behavior is common in flocks of birds and school of fish, when they try to escape from their predators or to hunt their preys. The desired distance between the robots are the following [m],
[m],
[m] and
[m]. The control gains were set to
and
.
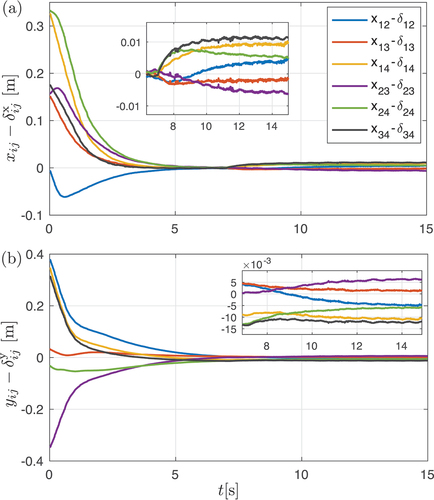
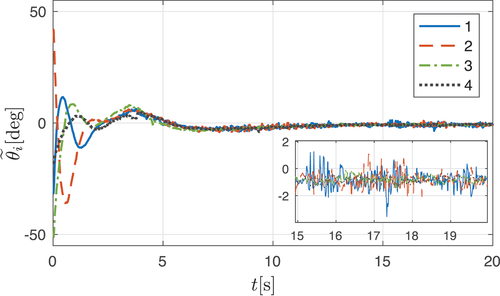
The trajectory of the mobile robots is shown in Figure . On the other hand, the distances shown in Figure are an evidence that the robots do not collide during the experiment. Khepera robots have a circular geometrical body, with 0.18 m radius, that is the threshold for collision. It can be appreciated in Figure that the robots successfully track the desired reference velocity. Figure shows the components of the distance error which converge asymptotically to zero; this means that the robots maintain a desired distance during their motion. Finally, the orientation errors are shown in Figure . After the transient response, the distance errors are less than 1.5[cm] while the orientation errors are less than 4[deg]. Notice that the errors are not exactly zero, this is mainly due to unmodeled dynamics, actuator, and communication delays.
Figure 4. Trajectory of the robots during the flocking experiment.
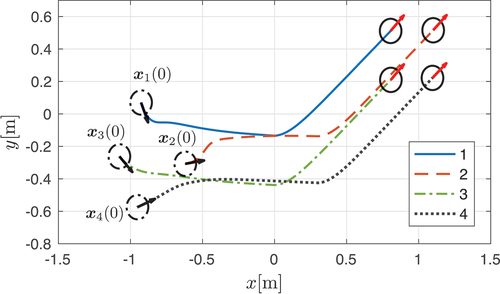
Figure 5. Distance of the robots during the flocking experiment. The dashed line indicates the threshold collision.
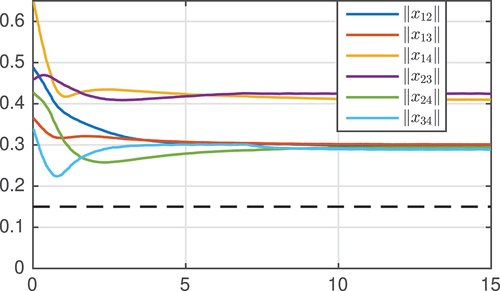
Figure 6. Linear velocity of the robots during the flocking experiment.
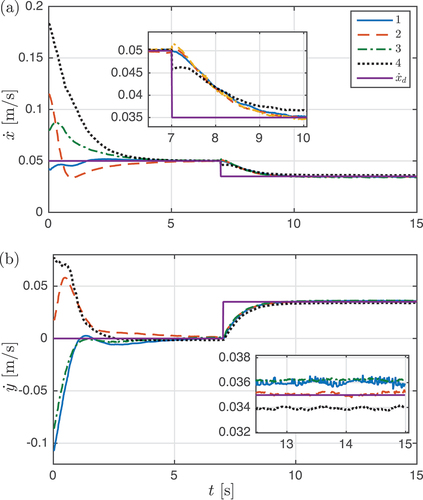
Figure 7. Orientation errors during the flocking experiments.
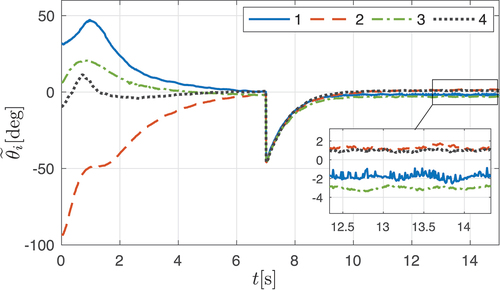
Figure 8. Distance errors during the flocking experiments, (a)
-coordinate (
) and (b)
-coordinate (
).
5.2. Formation experiment
In this experiment, the desired trajectory is a circular path given by
where . The Laplacian matrix is the same as the flocking experiment, also the desired constant offsets are chosen as
[m],
[m],
[m] and
[m]. In this experiment, the control gains were set to
,
and
.
The motion of the robots during the second experiment is depicted in Figure . As in flocking experiment, in this case the distance among robots is also calculated to determine if some collisions appear during the experiment. Figure shows that the robots did not collide during formation experiment. The position tracking errors are shown in Figure . The formation controller includes an integral action that improves the tracking performance. After the transient response, the tracking errors are less than 6 [mm]. Figure shows the components of the distance errors . This term converges asymptotically to zero, therefore, the group of wheeled mobile robots achieves the formation approximately after 10 seconds. The orientation errors are shown in Figure . After the transient response, such errors are less than 3[deg]. The experiment lasted 60 seconds but, in order to have a better visualization only the first 20 seconds of the experiment are shown in the figures. It is important to mention that, in both cases, the robots converge to the same orientation, as it is indicated by the red arrows in Figures .
Figure 9. Trajectory of the robots in the formation experiment.
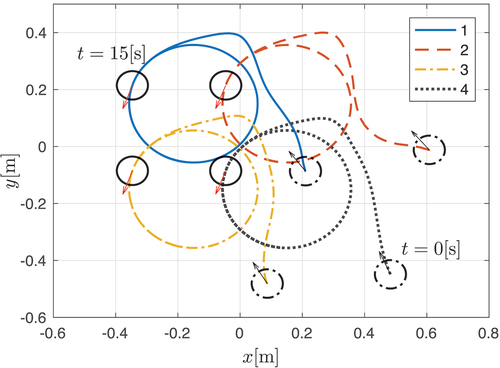
Figure 10. Distance of the robots during the formation experiment.
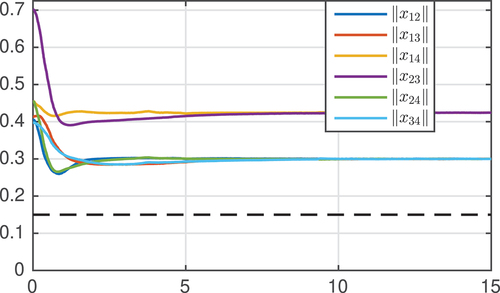
Figure 11. Position tracking errors in the formation experiment, (a) and
.
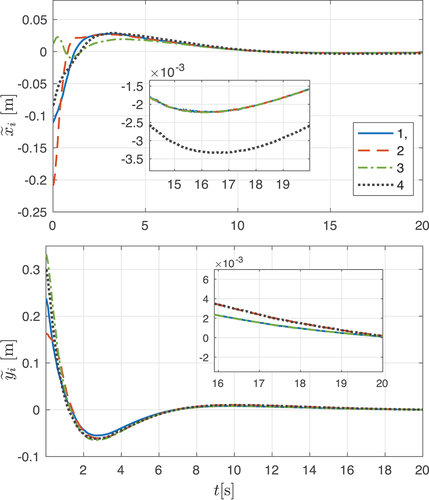
Figure 12. Distance errors during the formation experiment,a) -coordinate (
) and (b)
-coordinate (
).
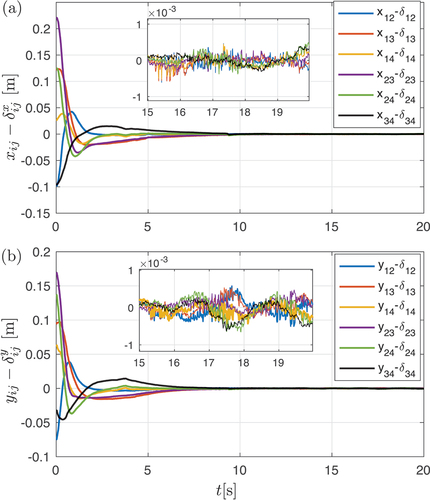
Figure 13. Orientation errors during the formation experiment.
6. Conclusion
In this paper, two control algorithms that achieve flocking and formation behaviors in a group of nonholonomic wheeled mobile robots are proposed. The controllers are designed by exploiting the cascade structure of the kinematic model of the mobile robot. The structure of the proposed controllers is simple and the orientation controller does not require to use the inverse of the tangent function to compute the desired orientation. The stability analysis was carried out by means of Lyapunov theory, properties of interconnected time-varying systems and the concept of input-to-state stability. The stability analysis showed that the origin of the closed-loop dynamics is a uniformly asymptotically equilibrium point. Moreover, the developed theory was successfully validated by experiments on a group of commercial mobile robots. As a future work, we will study the case when only partial state measurements are available and analyze the case when only a set of the robots know the reference velocity.
Disclosure statement
No potential conflict of interest was reported by the author(s).
Additional information
Funding
Notes on contributors
Javier Pliego-Jiménez
Javier Pliego-Jiménez received a Ph.D. in electrical engineering with a specialization in automatic control from UNAM, Mexico. He is currently part of the CICESE research center. His research interests include robotics, control theory, and dynamical systems.

Rigoberto Martínez-Clark
Rigoberto Martínez - Clark received his Ph.D. in electronics and telecommunications from CICESE, Mexico. Is part of the FCIAS at UABC His Research interests include swarm robotics, mechatronics design and control and automation.
César Cruz-Hernández
César Cruz-Hernández received the M.S. and Ph.D. degrees in electrical engineering from CINVESTAV, México. He is with CICESE, Mexico research center. His research interests include multimode oscillations of coupled oscillators, chaotic systems analysis and cryptography, social and neural networks, synchronization and control of complex dynamical systems, and some practical applications.
Jesús David Avilés-Velázquez
Jesús David Avilés-Velázquez received the Master and Doctor degrees in Electric Engineering, Automatic Control, from UNAM, Mexico. He is professor at UABC. His research interests include interval observer and control design, fault detection, and time-delay systems.
Juan Francisco Flores-Resendiz
Juan Francisco Flores-Resendiz obtained its Master and PhD on Electrical engineering by UNAM, Mexico. He is a full-time researcher-professor at the FCIAS in the UABC. His research interest includes adaptive control, decentralized control of interconnected systems and movement coordination for multiagent systems.
References
- Ban, Z., Hu, J., Lennox, B., & Arvin, F. (2021). . In Mobile Networks and Applications 26 2461–18 https://doi.org/10.1007/s11036-021-01785-7 .
- Beaver, L. E., & Malikopoulos, A. A. (2021). An overview on optimal flocking. Annual Reviews in Control, 51, 88–99. https://doi.org/10.1016/j.arcontrol.2021.03.004
- Brockett, R. (1983). Asymptotic stability and feedback stabilization. In R. Brockett, R. Millman, & H. Sussmann (Eds.), Differential Geometric Control Theory (pp. 181–191). Birkhauser.
- Cao, Y., Stuart, D., Ren, W., & Meng, Z. (2011). Distributed containment control for multiple autonomous vehicles with double-integrator dynamics: Algorithms and experiments. IEEE Transactions on Control Systems Technology, 19(4), 929–938. https://doi.org/10.1109/TCST.2010.2053542
- Chung, S.-J., & Slotine, -J.-J. E. (2009). Cooperative robot control and concurrent synchronization of lagrangian systems. IEEE Transactions on Robotics, 25(3), 686–700. https://doi.org/10.1109/TRO.2009.2014125
- Dai, F., Chen, M., Wei, X., & Wang, H. (2019). Swarm intelligence-inspired autonomous flocking control in uav networks. IEEE Access, 7, 61786–61796. https://doi.org/10.1109/ACCESS.2019.2916004
- de Kerckhove, D. T., & Shuter, B. J. (2022). Predation on schooling fish is shaped by encounters between prey during school formation using an ideal gas model of animal movement. Ecological Modelling, 470, 110008. https://doi.org/10.1016/j.ecolmodel.2022.110008
- Dong, W. (2011). Flocking of multiple mobile robots based on backstepping. IEEE Transactions on Systems, Man, and Cybernetics, Part B (Cybernetics), 41(2), 414–424. https://doi.org/10.1109/TSMCB.2010.2056917
- Dörfler, F., & Francis, B. (2010). Geometric analysis of the formation problem for autonomous robots. IEEE Transactions on Automatic Control, 55(10), 2379–2384. https://doi.org/10.1109/TAC.2010.2053735
- Francis, B. A., & Maggiore, M. (2016). Flocking and rendezvous in distributed robotics. Springer https://doi.org/10.1007/978-3-319-24729-8.
- Khaleidan, M., Tairan, L., Fernandez-Kim, V., & de Queiroz, M. (2019). Flocking and target interception control for formations of nonholonomic kinematic agents. IEEE Transactions on Control System Technology doi:10.1109/TCST.2019.2914994.
- Khalil, H. K. (2002). Nonlinear systems (third) ed.). volume 115.
- Liu, L., Guo, R., Ji, J., Miao, Z., & Zhou, J. (2020). Practical consensus tracking control of multiple nonholonomic wheeled mobile robots in polar coordinates. International Journal of Robust and Nonlinear Control, 30(10), 3831–3847. https://doi.org/10.1002/rnc.4967
- Liu, Z., Turgut, A. E., Lennox, B., & Arvin, F. (2021). Self-organised flocking of robotic swarm in cluttered environments. In Annual Conference Towards Autonomous Robotic Systems, pages 126–135. Springer.
- Liu, L., Yu, J., Ji, J., Miao, Z., & Zhou, J. (2019). Cooperative adaptive consensus tracking for multiple nonholonomic mobile robots. International Journal of Systems Science, 50(8), 1556–1567. https://doi.org/10.1080/00207721.2019.1617366
- Moshtagh, N., & Jadbabaie, A. (2007). Distributed geodesic control laws for flocking of nonholonomic agents. IEEE Transactions on Automatic Control, 52(4), 681–686. https://doi.org/10.1109/TAC.2007.894528
- Nuño, E., Ortega, R., Basañez, L., & Hill, D. (2011). Synchronization of networks of nonidentical euler-lagrange systems with uncertain parameters and communication delays. IEEE Transactions on Automatic Control, 56(4), 935–941. https://doi.org/10.1109/TAC.2010.2103415
- Olfati-Saber, R. (2006). Flocking for multi-agent dynamic systems: Algorithms and theory. IEEE Transactions on Automatic Control, 51(3), 401–420. https://doi.org/10.1109/TAC.2005.864190
- Parrish, J. K., Viscido, S. V., & Grunbaum, D. (2002). Self-organized fish schools: An examination of emergent properties. The Biological Bulletin, 202(3), 296–305. https://doi.org/10.2307/1543482
- Qiu, H., & Duan, H. (2020). A multi-objective pigeon-inspired optimization approach to uav distributed flocking among obstacles. Information Sciences, 509, 515–529. https://doi.org/10.1016/j.ins.2018.06.061
- Regmi, A., Sandoval, R., Byrne, R., Tanner, H., & Abdallah, C. (2005). Experimental implementation of flocking algorithms in wheeled mobile robots. In Proceedings of the 2005, American Control Conference, 4917–4922.
- Ren, W., & Beard, R. W. (2004). Decentralized scheme for spacecraft formation flying via the virtual structure approach. Journal of Guidance, Control, and Dynamics, 27(1), 73–82. https://doi.org/10.2514/1.9287
- Ren, W., Beard, R., & Atkins, E. (2007). Information consensus in multivehicle coperative control. IEEE Control Systems Magazine, 27(2), 71–82 doi:10.1109/MCS.2007.338264.
- Reynolds, C. (1987). Flocks, Herds, and Schools: A Distributed Behavioral Model. In 14th annual conference on computer graphics and interactive techniques (SIGGRAPH 87), 25–34, New York.
- Rozenheck, O., Zhao, S., & Zelazo, D. (2015). A proportional-integral controller for distance-based formation tracking. In 2015 European Control Conference (ECC)IEEE
- Sahu, B. K., & Subudhi, B. (2017). Flocking control of multiple auvs based on fuzzy potential functions. IEEE Transactions on Fuzzy Systems, 26(5), 2539–2551. https://doi.org/10.1109/TFUZZ.2017.2786261
- Saradagi, A., Muralidharan, V., Krishnan, V., Menta, S., & Mahindrakar, A. D. (2017). Formation control and trajectory tracking of nonholonomic mobile robots. IEEE Transactions on Control Systems Technology, 26(6), 2250–2258. https://doi.org/10.1109/TCST.2017.2749563
- Scardovi, L., Arcak, M., & Sontang, E. (2010). Synchronization of interconnected systems with applications to biochemical networks: An input-output approach. IEEE Transactions on Automatic Control, 55(6), 1367–1379. https://doi.org/10.1109/TAC.2010.2041974
- Subudhi, B., Rayguru, M. M., Filaretov, V., & Zuev, A. (2017). Design of a consensus based flocking control of multiple autonomous underwater vehicles using sliding mode approach Katalinic, B. DAAAM International . In Annals of DAAAM & Proceedings 28 (pp. 978-3-902734-11-2 https://www.daaam.info/Downloads/Pdfs/proceedings/proceedings_2017/001.pdf).
- Sun, Z., Anderson, B. D., Deghat, M., & Ahn, H.-S. (2017). Rigid formation control of double-integrator systems. International Journal of Control, 90(7), 1403–1419. https://doi.org/10.1080/00207179.2016.1207100
- Sun, Z., Mou, S., Deghat, M., & Anderson, B. D. (2015). Finite time distributed distance-constrained shape stabilization and flocking control for d-dimensional undirected rigid formations. International Journal of Robust and Nonlinear Control, 26(13), 2824–2844. https://doi.org/10.1002/rnc.3477
- Tanner, H. G., Jadbabaie, A., & Pappas, G. J. (2003). Stable flocking of mobile agents, part i: Fixed topology. In 42nd IEEE International Conference on Decision and Control (IEEE Cat. No. 03CH37475), 2, 2010–2015. IEEE.
- Toner, J., & Tu, Y. (1998). Flocks, herds, and schools: A quantitative theory of flocking. Physical Review E, 58(4), 4828. https://doi.org/10.1103/PhysRevE.58.4828
- Valbuena-Reyes, L., & Tanner, H. (2014). Flocking, formation control, and path following flocking, formation, and path following for a group of mobile robots. IEEE Transactions on Control System Technology, 23(4), 1269–1282 doi:10.1109/TCST.2014.2363132.
- Vos, E., van der Schaft, A. J., & Scherpen, J. M. (2016). Formation control and velocity tracking for a group of nonholonomic wheeled robots. IEEE Transactions on Automatic Control, 61(9), 2702–2707. https://doi.org/10.1109/TAC.2015.2504547
- Zhao, X.-W., Guan, Z.-H., Li, J., Zhang, X.-H., & Chen, C.-Y. (2017). Flocking of multi-agent nonholonomic systems with unknown leader dynamics and relative measurements. International Journal of Robust and Nonlinear Control, 27(17), 3685–3702 https://doi.org/10.1002/rnc.3762.