
 ?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.
?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.Abstract
In this paper we study stability and convergence for hp-streamline diffusion (SD) finite element method for the, relativistic, time-dependent Vlasov–Maxwell (VM) system. We consider spatial domain and velocities
The objective is to show globally optimal a priori error bound of order
for the SD approximation of the VM system; where
is the mesh size and
is the spectral order. Our estimates rely on the local version with hK being the diameter of the phase-space-time element K and pK the spectral order for K. The optimal hp estimates require an exact solution in the Sobolev space
Numerical implementations, performed for examples in one space- and two velocity dimensions, are justifying the robustness of the theoretical results.
1. Introduction
In the SD method the weak form is modified by adding a multiple of the streaming part in the equation, to the test function. So we obtain a multiple of streaming terms in both test and trial functions. This can be viewed as an extra diffusion in the streaming direction in the original equation. Hence, the name of the method (the streamline diffusion). Such an extra diffusion would improve both the stability and convergence properties of the underlying Galerkin scheme. It is well known that the standard Galerkin method, used for hyperbolic problems, has a suboptimal behavior: Converges as (versus
for the elliptic and parabolic problems with exact solution in the same space:
). The SD method improves this drawback by
also, having an upwinding character, enhances the stability. The properties that are achieved by the discontinuous Galerkin as well. The hp-approach is to capture local behavior in the sense that: in the vicinity of singularities refined mesh h is combined with the lower spectral order (small p), whereas in more smooth regions higher order polynomials (large p) and non-refined (large h) meshes are used. Hence, the hp-approach may be viewed as a kind of automatic adaptivity.
The Vlasov–Maxwell (VM) system describing the time evolution of collisionless plasma is formulated as
(1.1)
(1.1)
with, physically relevant, initial data
Here f is the density, in phase space, time of particles with charge q, mass m and velocity
Moreover, c is the speed of light and the charge and current densities: ρ and j are
(1.2)
(1.2)
The Vlasov–Maxwell equations arise in several context such as, e.g., continuum, plasma physics and rarefied gas dynamics, where the main assumption underlying the model is that collisions are rare and therefore negligible. The system Equation(1.1)(1.1)
(1.1) is modeling the motion of a collisionless plasma, e.g., a high-temperature, low-density, ionized gas. The mathematical challenge in study of the Vlasov–Maxwell system is the presence of the nonlinear term:
In the case of divergence free field, this term is written as
A thorough mathematical analysis, with such nonlinearity, is studied by Di Perna and Lions in DiPerna and Lions (Citation1989).
An outline of the remaining part of this paper is as follows: In Section 2 we present the canonical form of the equations and state the numerical approximation strategy. Section 3 describes hp and SD strategies. Section 4 is devoted to the approximation of the projection error. In Section 5 we study the convergence of the constructed schemes. In our concluding Section 6 we implement some numerical examples in a lower dimensional case that justifies our theoretical study.
2. Canonical forms
As a general framework we introduce similar convective forms f or both Vlasov and Maxwell equations. The convection coefficients are nonlinear vector functions for the Vlasov equation and constant sparse multiple matrices in the Maxwell case. Despite physical diversities, these coefficients are exhibiting a common property: they both are divergence free, a property that substantially simplifies the analysis. Let then the Maxwell’s equations can be written as
where
denotes the derivative with respect to xi. We also introduce 6 × 6 symmetric matrices
:
(2.1)
(2.1)
To write the Maxwell equations in the matrix-vector form, we introduce the matrix-vector notation and set
Further let
and use the notations for the initial values
Then
(2.2)
(2.2)
Note that Equation(2.2)(2.2)
(2.2) is convective with, matrix-vector form, divergent free (
) convection coefficient.
The Vlasov possesses a similar structure, but with nonlinear coefficient vectors depending on x and v:
(2.3)
(2.3)
which can be rewritten in a compact form as
(2.4)
(2.4)
where
is the total gradient and
is divergence free:
(2.5)
(2.5)
Throughout the paper C will denote a generic constant, not necessarily the same at each occurrence, unless otherwise explicitly specified.
2.1. The numerical approximation strategy
Consider a function F in an infinite dimensional Hilbert (or Banach) space We want to approximate F with a function
in a finite dimensional subspace
of
To this end, first we assume a classical form approximation (an interpolant, or a projection, e.g. L2- or Ritz-projection)
of F. Then, roughly, the idea is i) to use (or establish) a theoretical error estimate, in a certain norm, for the interpolation or projection error
and ii) split the numerical error as
and prove that there is a constant C such that
(2.6)
(2.6)
The intermediate (theoretical) part, i.e., control of is the most crucial step in the efficiency of the numerical approximation procedure. The numerical approach gets its reliability from the stability of the constructed numerical method and its accuracy from the convergence analysis.
3. The SD and hp structures
3.1. Constructing finite element spaces
For numerical studies we need to restrict the variables to bounded domains: and
as the space and velocity, respectively. We assume that
and
for i = 1, 2, 3, have compact supports in Ωx and that
has compact support in both Ωx and Ωv. Assume that
and let
and
be finite element subdivisions of Ωx with elements τx and Ωv with elements τv, respectively. Then
is a subdivision of Ω. (with a, phase-space, mesh size h). Let now
be a partition of the time interval
into sub-intervals
with
Further let
be the corresponding subdivision of
into the prismatic elements
with
as the mesh parameter. We also define a piecewise constant mesh function
Finally, induced from
we introduce
as the finite element subdivision of
Remark 3.1.
From now on, the discrete schemes are the finite element approximations of EquationEquations (2.2)(2.2)
(2.2) and Equation(2.3)
(2.3)
(2.3) with
associated with initial and boundary conditions. Assuming also that f has compact support in the velocity space we get homogeneous Dirichlet boundary condition for Ωv.
To formulate variational (weak) form of the VM system we introduce the product spaces
where
and for
For we define the finite element spaces for the Maxwell’s equations (resp. Vlasov equation) as being the space of piecewise polynomials that are continuous in x (resp. in x and v) with possible discontinuities at the interior time levels
:
with the extension for the Vlasov part and with
as
where
is the set of polynomial of degree at most pK on the underlying set. Here we allow the degree of polynomial to vary from elementwise. Therefore we may define the piecewise constant function
Finally we shall use the following notation:
where, for
for the Maxwell’s equations and
in the Vlasov case.
3.2. The SD strategy
The idea of the weak form for a differential equation, e.g., variational formulation and the finite element methods, rely on the basic structure of the Fourier transformation: to multiply the function f by a basis function and integrate. Then for each
we extract an information,
from the function f (these are the Fourier coefficients when considering Fourier series). In this way we get an “excessive amount (
) of information,” which (i) is unrealistic to tackle and (ii) contains a great deal of unnecessary data. The remedy is a clever choice of a finite number of, treatable, multipliers that provides the most crucial information needed. This is basically the goal of the Galerkin approach with finitely many multipliers. However, here we need to extract the information from the PDE itself rather than its solution. We seek an approximate solution for a PDE in a finite dimensional space (trial space) with the multipliers being in the same or a closely related finite dimensional space known as the test function space. The idea with the SD method is to multiply the underlying PDE by a sum of the test function and a multiple of an expression as the streaming term in the PDE, with the solution is replaced by the test function, say g. Hence, we consider a common form for Equation(2.2)
(2.2)
(2.2) and Equation(2.4)
(2.4)
(2.4) , viz.
(3.1)
(3.1)
and formulate the SD scheme to find the solution F such that
(3.2)
(3.2)
Expanding EquationEquation (3.2)(3.2)
(3.2) we get a term of the form
Setting g = F, this term can be interpreted as coming from a diffusion term
of order δ, in the streamline direction μ, hence the name of the method.
3.3. The hp approach
Here, we introduce the main function spaces employed in hp-studies for approximating the projection errors, (see, e.g. Houston et al. Citation2000): Let be a partition of
into open patches P which are images of canonical “cubes”:
under smooth bijections FP:
We construct a mesh on ΩT by subdividing each
into
-dimensional generalized quadrilateral elements
or
-dimensional prisms. We label them as
which are affine equivalent to
and call the mesh
(on
). Then, on each
we define a mesh
by setting
Each is an image of the domain
under an affine mapping
Next we define the space
and the polynomial space
where
and
is multi-index Moreover let p be a polynomial degree vector in
and define the continuous hp-finite element spaces
for polynomials with degree vector p, and with
for the uniform polynomial degree
Finally we denote by
and
the
norm and seminorm on
respectively (we shall suppress k = 0, corresponding to the L2-norm). We also denote by
the set of polynomials of degree p on
In the Maxwell case one needs to replace the domain
by
4. Approximation of the projection error
The projection error estimates are of analytic nature and often predictable, however too involved to derive. In this section we provide estimates, without proofs, for and
where
denotes the total gradient operator. We denote by
the 1-dimensional H1-projection of f onto the polynomials of degree p in the ith coordinate, where
would correspond to xi’s for the spatial variable,
to vi’s for the velocity, and
for the time variable. We shall apply the tensor product in
-dimensions to the following one-dimensional results by Schwab (Citation1998).
Proposition 4.1.
Let for some
. Then, for every
, there exists a projection
such that, for any
(4.1)
(4.1)
(4.2)
(4.2)
The theorem below is a generalized version of Proposition 4.1, in dimensions with
: the tensor product projectors and binary multi-index
with mn = 0 or 1, is derived in Asadzadeh and Sopasakis (Citation2007).
Theorem 4.2.
Let be a partition of the domain
and
be an image of the
-dimensional canonical hypercube
, with
-dimensional mesh
, under the bijection
. For the polynomial degree distribution
and
, let
for some
. Then, for
and
we have
with
is the Sobolev norm in
and
where
and
The proof is based on a scaling argument for an affine mapping and a generalization of the Proposition 4.1.
Remark 4.3.
The above estimates relying on Sobolev inequalities are dimension dependent and give rise to singularities in higher dimensions. In addition, the bound for s () and the fact that the spectral order p cannot be chosen very large, limits the value of
in
to
This yields additional bounds for the indices of the interior sums.
Using Stirling’s formula, see Houston et al. (Citation2000), one can show that
An estimate that is crucial in deriving p-version of hp estimates.
5. Convergence analysis
Due to the common structure for the Maxwell Equation(2.2)(2.2)
(2.2) and Vlasov Equation(2.4)
(2.4)
(2.4) equations, and since the hp-SD approach has been considered for Equation(2.4)
(2.4)
(2.4) in Asadzadeh and Sopasakis (Citation2007), below we give the details only in the Maxwell case Equation(2.2)
(2.2)
(2.2) .
5.1. hp-method for Maxwell equations
Starting with, sufficiently smooth, f0, b0 and W0, let and
denote the approximations on the ith iteration step (i > 0) for f, b and W, respectively. The h version of the SD method on the ith step for the Maxwell’s part (with the short operator notation:
recall that
are the 6 × 6 matrices in Equation(2.1)
(2.1)
(2.1) ) can be formulated as: find
such that
(5.1)
(5.1)
where
with the bilinear form
defined as
denotes the jump (
), and the linear form
is given by
Let now denote the L2 product over K and define a nonnegative piecewise constant function δ by
We may formulate a finite element method based on the local space-time elements. Then, the problem Equation(5.1)(5.1)
(5.1) would have an alternative formulation replacing in the definitions for
and
the sum of the inner products
involving δK by the corresponding sum
and all δ by δK. Then, Equation(5.1)
(5.1)
(5.1) will be rewritten as
(5.2)
(5.2)
and the solution W of EquationEquation (2.2)
(2.2)
(2.2) satisfies the variational formulation
(5.3)
(5.3)
Subtracting EquationEquation (5.1)(5.1)
(5.1) from EquationEquation (5.3)
(5.3)
(5.3) we end up with the following relation:
(5.4)
(5.4)
Finally, with jumps at the time levels we introduce the computational norm
Lemma 5.1.
[Well-posedness] The bilinear form satisfies the M-coercivity relation
Proof.
We split viz.
with
defined as
(5.5)
(5.5)
where we used integration by parts and in the latter also
on
Then, the proof follows adding all above terms and the definition of
□
Let now be an interpolant of W in the finite dimensional space
and denote by
a solution to Equation(5.1)
(5.1)
(5.1) . Further, set
and introduce a split of the error
viz.
Now we can state and prove our main result: the hp-convergence theorem for the Maxwell’s equations.
Theorem 5.2.
Assume that
for some constant
, and
for some constant
. Then there exists a constant C > 0 such that
where
with
for
and
(defined in Theorem 4.2) and C is independent of pK, hK and sK.
Proof.
By the coercivity Lemma 5.1 and Equation(5.4)(5.4)
(5.4) we have that
We start estimating the first term on the right-hand side:
Integration by parts: That
and
have compact support in Ωx yields
Inserting in
by standard inequalities
With a similar argument we can bound the second term as
The above inequalities and a Poincaré inequality, with properly chosen C and bound on yield
(5.6)
(5.6)
where in the latter I1 and I2 are the interpolation error terms given by:
To bound I1 we use the estimates in Theorem 4.2 and get
(5.7)
(5.7)
By trace and inverse inequalities combined with interpolation estimates and Theorem 4.2 we end up with
(5.8)
(5.8)
Now, a kick-back argument and the estimates Equation(5.7) and (5.8)(5.8)
(5.8) gives
(5.9)
(5.9)
Finally it is easy to verify the discrete Grönwall’s inequality,
for
Plugging these inequalities into Equation(5.9)
(5.9)
(5.9) completes the proof.□
Corollary 5.3.
By the above theorem and the estimate in Schwab (Citation1998), we can derive and hence, suppressing the subscripts in finial setting get a hp error estimate as
(5.10)
(5.10) which is the most desired form of optimal hp error estimate.
5.1.1. Vlasov–Maxwell equations
As mentioned in the introduction, for the Vlasov part, we omit all details and state the final result:
Theorem 5.4.
Let be the discrete solution to the Vlasov equation at the iteration step i and assume that the exact solution f of Equation(2.3)
(2.3)
(2.3) is in the Sobolev class
and satisfies the bound
(5.11)
(5.11)
Further assume that the parameter δK on each K satisfies for some positive constant C1 with
for some constant
. Then there exists a generic constant C > 0 such that
(5.12)
(5.12)
Here, and the subscripts V or M in the triple norms as well as
:s is to emphasize the quantities for the Vlasov or Maxwell part. Here,
with
for
and
as defined in Theorem 4.2.
We omit the proof which is a lengthy extension of the proof of the main result in Asadzadeh and Sopasakis (Citation2007), replacing the contribution of scalar Fokker-Planck term with that of the Maxwell’s system.
5.2. Conservation of charge
In this section we state the conservation of charge (mass conservation) result.
Theorem 5.5.
For any T > 0 and the initial data f0 as in the convergence theorem, the discrete solution of the Vlasov equation satisfies
Proof.
Let B be the convex open set such that for all
and
Let
such that
for all
and
Taking this g as a test function in the variational formulation of the Vlasov equation and using the fact that
we get the result.□
6. Numerical results
We present in this section results of some numerical implementations that justify the accuracy of the SD method. The computations are performed for the simplified case of one spatial variable and two velocities (cf., Standar Citation2016), which takes the following form:
where
and
where we take
and
Here we consider the non-relativistic case since there is an excessive amount of literature available to compare the numerical results. Our results are also valid in this case. We consider the following, somewhat general, initial conditions:
They correspond to the streaming Weibel instability (cf Cheng et al. Citation2014) with the specific values for the parameters: and b = 0.001. Our implementations are performed for
and the following two parameter sets:
We assume periodic boundary condition in x, which we normalized in the computations taking The accuracy tests are performed for
whereas for the other test we set
6.1. Accuracy tests
For the above setting, the Vlasov–Maxwell system is reversible in the time variable. Hence, with the initial condition E(0, x), B(0, x), yield, for t = T, the solution
E(T, x), and B(T, x). Taking
E(T, x),
as solution at t = 0, we recover
E(0, x),
at t = T.
We run the calculation for T = 5 and show L1 and L2 errors of solutions for several choices of degree of polynomials p and mesh parameters ht, hx, and hv. For all calculations we used the uniform degrees p in all cells of uniform meshes. We present the results for the following choice of mesh sizes sets: H1 corresponds to and
H2 corresponds to
and
H3 corresponds to
and
lists the errors for the fixed mesh set H1 and increasing degree of finite elements polynomial approximation, whereas in we list the errors for the fixed degree p = 1 and different mesh sizes.
Table 1. L1 and L2 errors for different polynomial degrees and fixed mesh sizes set H1.
Table 2. L1 and L2 errors for different mesh sizes and fixed polynomial degree p = 1.
The tables show the convergence of our hp-SD algorithm for all considered cases. We present the results for one value of the stability parameter since its choice does not influence importantly the accuracy, but only the stability of the method.
6.2. Conservation properties
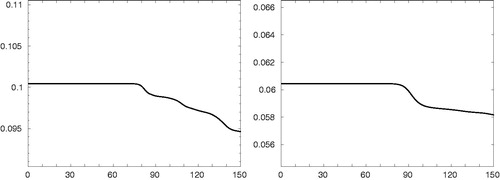
To verify the conservation properties of our scheme we run the tests for the streaming Weibel instability. The results are shown in for the mass and for the total energy. Both moments are very well conserved up to time for case 1 and
for case 2, when the instabilities occur. After that the error for the mass is less then
however we can observe the large decay in the total energy.
Figure 1. Charge vs. time for case 1 (left) and case 2 (right) of the streaming Weibel instability.
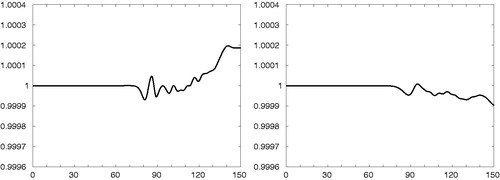
Figure 2. Total energy vs. time for case 1 (left) and case 2 (right) of the streaming Weibel instability.
7. Conclusions
This study is devoted to the hp streamline diffusion for the relativistic Vlasov–Maxwell system in 3 D. Our objective is to present space-time (for Maxwell’s) and phase-space-time (for VM system) discretization schemes that have optimal order of convergence ( for solutions in
), where h is the mesh size and p the spectral order. The adaptivity in a priori regime is based on refining in the vicinity of singularities combined with lower order approximating polynomials and nonrefined mesh with a higher spectral order in smooth regions. To our knowledge, except in some work in convection–diffusion problems, e.g. Asadzadeh and Sopasakis (Citation2007), Houston et al. (Citation2000), such approach is not considered elsewhere.
The results are justified, in lower dimensional cases, through the presented accuracy and the streaming Weibel instability tests. In all our simulations we used uniformly spaced grids in all variables and uniform degree of polynomials, and in the future paper we plan to examine the non-uniform grids and degree cases.
The full-dimensions are too complex and expensive to experiment. However, the theoretical analysis and numerical justifications in lower dimensions are indicating the robustness of the considered schemes.
References
- Asadzadeh, M., and A. Sopasakis. 2007. Convergence of a hp-streamline diffusion scheme for Vlasov–Fokker–Planck system. Math. Models Methods Appl. Sci. 17 (8): 1159–82. doi:10.1142/S0218202507002236
- Cheng, Y., I. M. Gamba, F. Li, and P. J. Morrison. 2014. Discontinuous Galerkin methods for the Vlasov–Maxwell equations. SIAM J. Numer. Anal. 52 (2): 1017–49. doi:10.1137/130915091
- DiPerna, R. J., and P. L. Lions. 1989. Global weak solutions of Vlasov–Maxwell systems. Comm. Pure Appl. Math. 42 (6): 729–57. doi:10.1002/cpa.3160420603
- Houston, P., C. Schwab, and E. Süli. 2000. Stabilized hp-finite element methods for first order hyperbolic problems, SIAM. SIAM J. Numer. Anal. 37 (5): 1618–43. doi:10.1137/S0036142998348777
- Schwab, C. 1998. p- and hp-Finite element methods. Theory and applications in solid and fluid mechanics. Oxford Science Publication.
- Standar, C. 2016. On streamline diffusion schemes for the one and one-half dimensional relativistic Vlasov–Maxwell system. Calcolo 53 (2): 147–69. doi:10.1007/s10092-015-0141-4