
 ?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.
?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.Abstract
This paper introduces a new acceleration technique for the convergence of the solution of transport problems with highly forward-peaked scattering. The technique is similar to a conventional high-order/low-order (HOLO) acceleration scheme. The Fokker-Planck equation, which is an asymptotic limit of the transport equation in highly forward-peaked settings, is modified and used for acceleration; this modified equation preserves the angular flux and moments of the (high-order) transport equation. We present numerical results using the Screened Rutherford, Exponential, and Henyey–Greenstein scattering kernels and compare them to established acceleration methods such as diffusion synthetic acceleration (DSA). We observe three to four orders of magnitude speed-up in wall-clock time compared to DSA.
1. Introduction
Transport problems with highly forward-peaked scattering are prevalent in a variety of areas, including astrophysics, medical physics, and plasma physics (Henyey and Greenstein Citation1941; Aristova and Gol'din Citation2000; Patel et al. Citation2019). For these problems, solutions of the transport equation converge slowly when using conventional methods such as source iteration (SI) (Adams and Larsen Citation2002) and the generalized minimal residual method (GMRES) (Saad and Schultz Citation1986). Moreover, diffusion-based acceleration techniques like diffusion synthetic acceleration (DSA) (Alcouffe Citation1977) and nonlinear diffusion acceleration (NDA) (Knoll et al. Citation2011) are generally inefficient when tackling these problems, as they only accelerate up to the first moment of the angular flux (Patel et al. Citation2020). Higher order moments carry important information in problems with highly forward-peaked scattering and can be used to further accelerate convergence (Patel Citation2016).
This paper focuses on solution methods for the monoenergetic, steady-state transport equation in slab geometry. Under these conditions, the transport equation is given by:
(1.1a)
(1.1a)
with boundary conditions
(1.1b)
(1.1b)
(1.1c)
(1.1c)
Here, represents the angular flux at position x and direction μ, σt is the macroscopic total cross section,
is the differential scattering cross section, and Q is an internal source.
Several innovations have paved the way to better solve this equation in systems with highly forward-peaked scattering. For instance, work has been done on PL acceleration using modified scattering cross section moments to accelerate convergence of anisotropic transport problems (Khattab and Larsen Citation1991). To speed up the convergence of radiative transfer in clouds, a quasi-diffusion method has been developed (Aristova and Gol'din Citation2000). In addition, the DSA-multigrid method was developed to solve problems in electron transport more efficiently (Turcksin et al. Citation2012).
One of the most recent convergence methods developed is Fokker-Planck Synthetic Acceleration (FPSA) (Patel et al. Citation2020; Patel Citation2016). FPSA accelerates up to N moments of the angular flux and has shown significant improvement in the convergence rate for the types of problems described above. The method returns a speed-up of several orders of magnitude with respect to wall-clock time when compared to DSA (Patel et al. Citation2020).
In this paper we introduce a new acceleration technique, called here Modified Fokker-Planck Acceleration (MFPA). This method employs a modified Fokker-Planck (FP) equation that preserves the moments of angular flux given by the transport equation. This preservation of moments is particularly appealing for applications to multiphysics problems (Patel et al. Citation2019), in which the coupling between transport and the other physics can be done through the (lower order) FP equation. To our knowledge, this is the first implementation of a numerical method that returns a Fokker-Planck-like equation that is discretely consistent with the linear Boltzmann equation.
This paper is organized as follows. Section 2 starts with a brief description of FPSA. Then, we derive the MFPA scheme. In Section 3, we discuss the discretization schemes used in this work and present numerical results for homogeneous and heterogeneous slabs. These are compared against standard acceleration techniques. In Section 4 we present an angularly-discrete Fourier analysis for MFPA, and show that the theoretical and numerical spectral radii are in agreement. We conclude with a discussion in Section 5.
2. Fokker-Planck acceleration
In this section we briefly outline the theory behind FPSA and describe MFPA for monoenergetic, steady-state transport problems in slab geometry.
To solve the transport problem given by Equations (Equation1.1(1.1a)
(1.1a) ), we approximate the in-scatter term in EquationEquation (1.1a)
(1.1a)
(1.1a) with a Legendre moment expansion:
(2.1)
(2.1)
with
(2.2)
(2.2)
Here, is the lth Legendre moment of the angular flux,
is the lth Legendre coefficient of the differential scattering cross section, and Pl is the lth-order Legendre polynomial. For simplicity, we will drop the notation
in the remainder of this section.
The solution to EquationEquation (2.1)(2.1)
(2.1) converges asymptotically to the solution of the following Fokker–Planck equation as scattering angle (as well as energy loss per collision in the energy-dependent case) limits to zero (Pomraning Citation1992):
(2.3)
(2.3)
where
is the momentum transfer cross section, and
is the macroscopic absorption cross section.
Source Iteration (Adams and Larsen Citation2002) is generally used to solve EquationEquation (2.1)(2.1)
(2.1) , which can be rewritten in operator notation:
(2.4)
(2.4)
where
(2.5)
(2.5)
and m is the iteration index. This equation is solved iteratively until a tolerance criterion is met. The FP approximation shown in EquationEquation (2.3)
(2.3)
(2.3) can be used to accelerate the convergence of EquationEquation (2.1)
(2.1)
(2.1) .
2.1. FPSA: Fokker–Planck synthetic acceleration
In the FPSA scheme (Patel et al. Citation2020; Patel Citation2016), the FP approximation is used to synthetically accelerate convergence when solving EquationEquation (2.1)(2.1)
(2.1) (cf. (Adams and Larsen Citation2002) for a detailed description of synthetic acceleration). Synthetic acceleration is mathematically equivalent to preconditioning. When solving EquationEquation (2.4)
(2.4)
(2.4) , the angular flux at each iteration m has an error associated with it. FPSA systematically follows a predict, correct, iterate scheme. A transport sweep, one iteration in EquationEquation (2.4)
(2.4)
(2.4) , is made for a prediction. The FP approximation is used to estimate the error in the prediction. The prediction is corrected and the next iteration is performed if convergence criterion is not met. The equations used are
(2.6a)
(2.6a)
(2.6b)
(2.6b)
where we define
as
(2.7)
(2.7)
In this synthetic acceleration method, the FP approximation is used to estimate the error in each iteration of the (high-order) transport EquationEquation (2.6a)(2.6a)
(2.6a) . Therefore, there is no consistency between the moments of angular flux in the transport and FP equations.
2.2. MFPA: Modified Fokker–Planck acceleration
Similar to FPSA, MFPA uses the FP approximation to accelerate the convergence of the solution. To force the transport and FP equations to be consistent, we modify the Fokker–Planck equation by adding a consistency term to EquationEquation (2.3)(2.3)
(2.3) . This consistency term can be defined in a number of ways, and its choice may determine the numerical stability of the method. Here, we present two possible choices for this term: one nonlinear and the other linear.
2.2.1. Nonlinear consistency term
We add the term to the right-hand side of EquationEquation (2.3)
(2.3)
(2.3) , which yields the modified FP equation:
(2.8a)
(2.8a)
where D is given by
(2.8b)
(2.8b)
Then, the MFPA method is given by the following equations:
(2.9a)
(2.9a)
(2.9b)
(2.9b)
(2.9c)
(2.9c)
where ψHO is the angular flux obtained from the HO (transport) equation and ψLO is the angular flux obtained from the LO (modified FP) equation. The nonlinear HOLO-plus-consistency system given by Equations (2.9) can be solved using any nonlinear solution technique (Carl Citation2003). Note that this MFPA scheme generates a modified FP equation that is consistent with HO transport. Moreover, this modified FP equation accounts for large-angle scattering, which the standard FP equation does not. The LO EquationEquation (2.3)
(2.3)
(2.3) can then be integrated into multiphysics models in a similar fashion to standard HOLO schemes (Patel et al. Citation2014). To solve the nonlinear HOLO-plus-consistency system above, we use Picard iteration (Carl Citation2003):
(2.10a)
(2.10a)
(2.10b)
(2.10b)
(2.10c)
(2.10c)
where
and
are given in EquationEquation (2.5)
(2.5)
(2.5) ,
and
are given in EquationEquation (2.7)
(2.7)
(2.7) ,
is the identity operator, and k is the iteration index. Iteration is done until a convergence criterion is met. The disadvantage of defining the consistency term as EquationEquation (2.8b)
(2.8b)
(2.8b) is that instability will occur in problems that have zero (or close to zero) angular flux anywhere in the system.
2.2.2. Linear consistency term
Similarly, to the previous procedure, we add a term DF to the right-hand side of EquationEquation (2.3)(2.3)
(2.3) , resulting in the following MFPA method
(2.11a)
(2.11a)
(2.11b)
(2.11b)
where the consistency term DF is given by
(2.11c)
(2.11c)
Without the multiplication of ψ present in the previous case, the system of equations is linear and will be stable for problems with zero angular flux. Although Picard iteration is typically used for nonlinear problems [Carl Citation2003], we setup the linear solver similar to Picard iteration used in Equation (2.10):
(2.12a)
(2.12a)
(2.12b)
(2.12b)
(2.12c)
(2.12c)
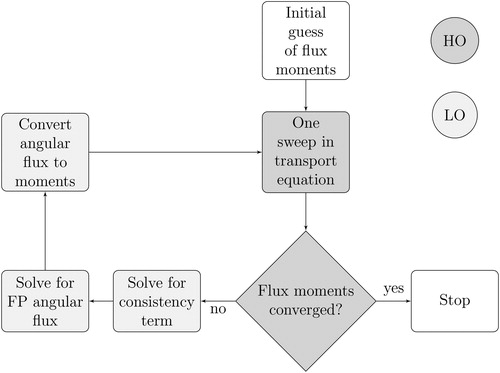
The main advantage of setting up the solver in this fashion is that the stiff matrix for LO needs to be setup and inverted only once, just as with FPSA (Patel et al. Citation2020; Patel Citation2016). This has a significant impact on the method’s performance. A flowchart of this algorithm is shown in .
Figure 1. MFPA algorithm.
Naturally, Equations (2.11) can also be solved linearly. In that case, we can rewrite them using operator notation as follows:
(2.13a)
(2.13a)
(2.13b)
(2.13b)
where we substituted the definition of DF into EquationEquation (2.13b)
(2.13b)
(2.13b) . Substituting the definition of ψLO in EquationEquation (2.13b)
(2.13b)
(2.13b) into EquationEquation (2.13a)
(2.13a)
(2.13a) and rearranging, we obtain
(2.14)
(2.14)
where
EquationEquation (2.14)
(2.14)
(2.14) can be solved using any linear solution technique, such as GMRES.
Due to the instability generated by having a zero value for the angular flux in the denominator of D for beam problems, the solutions obtained with the nonlinear term fail to converge to the correct result. Bearing that in mind, from this point forward we only use the consistency term DF in this paper.
3. Numerical experiments
In Section 3.1 we describe the discretization methods used to implement the algorithms. In Section 3.2 we provide numerical results for two different choices of source and boundary conditions. For each choice we solve the problem for homogeneous and heterogeneous slabs, and use three different scattering kernels, applying three different choices of parameters for each kernel. We provide MFPA numerical results for these cases and compare them against those obtained from FPSA and other methods.
All numerical experiments were performed using MATLAB. Runtime was tracked using the tic-toc functionality (MATLAB 2017), with only the solver runtime being taken into consideration in the comparisons. A 2017 MacBook Pro with a 2.8 GHz Quad-Core Intel Core i7 and 16 GB of RAM was used for all simulations.
3.1. Discretization
The transport and FP equations were discretized using linear discontinuous finite element discretization in space (Warsa and Prinja Citation2012), and discrete ordinates (SN) in angle (Lewis and Miller Citation1993). The FP operator was discretized using moment preserving discretization (MPD) (Warsa and Prinja Citation2012). Details of the derivation of the linear discontinuous finite element discretization can be seen in (Patel Citation2016; Martin Citation1976). The finite element discretization for the FP equation follows the same derivation.
A brief review for the angular discretization used for the FP equation is given below. First, we use Gauss-Legendre quadrature to discretize the FP equation in angle (Warsa and Prinja Citation2012):
(3.15)
(3.15)
for
Here,
is the discrete form of the angular Laplacian operator evaluated at angle n.
The MPD scheme is then shown as (Warsa and Prinja Citation2012)
(3.16)
(3.16)
where M is the MPD discretized operator defined by
(3.17a)
(3.17a)
and
(3.17b)
(3.17b)
for
Here,
are the Legendre polynomials evaluated at each angle μj and wj are their respective weights. M is defined as a (N × N) operator for a vector of N angular fluxes
at spatial location x.
In summary, if we write the FP equation as
(3.18)
(3.18)
then
is Diag
for
(x) is a vector of source terms
and
is represented by
3.2. Numerical results
False convergence has been shown to result in inaccurate solutions for slowly converging problems (Adams and Larsen Citation2002). To work around this issue, the convergence criterion is modified to use information about the current and previous iteration:
(3.19)
(3.19)
We simulated homogeneous and heterogeneous slab problems using 200 spatial cells, X = 400, L = 15, and N = 16. Problem set 1 has vacuum boundaries and a homogeneous, isotropic source
for
Problem set 2 has no internal source and an incoming beam at the left boundary. The source and boundary conditions used are shown in .
Table 1. Problem parameters.
We consider three scattering kernels in this paper: Screened Rutherford (Pomraning Citation1992), Exponential (Pomraning et al. Citation1992), and Henyey–Greenstein (Henyey and Greenstein Citation1941). Three cases for each kernel were tested. The results obtained with MFPA using Picard iteration are compared with those obtained using SN with DSA and FPSA with the MPD scheme.
Furthermore, results are also given for MFPA and FPSA using GMRES and compared with the results from MFPA using Picard iteration. MATLAB has a GMRES function (MATLAB, 2017) with built-in convergence criterion. The convergence criterion used for Picard iteration was chosen to match MATLAB’s GMRES function such that:
(3.20)
(3.20)
3.2.1. SRK: screened Rutherford Kernel
The Screened Rutherford Kernel (Patel et al. Citation2020; Pomraning Citation1992) is a widely used scattering kernel for modeling scattering behavior of electrons (Dixon et al. Citation2015). The kernel depends on the screening parameter η (Dixon et al. Citation2015), such that
(3.21)
(3.21)
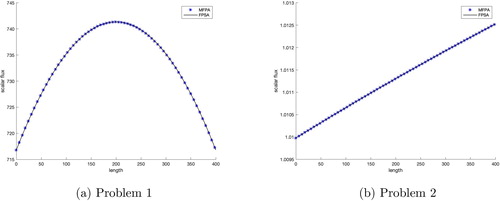
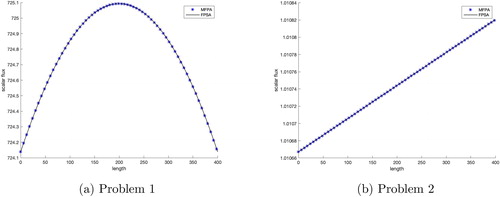
The SRK has a valid FP limit as η approaches 0 (Patel et al. Citation2020). Three different values of η were used to generate the scattering kernels shown in . GMRES, DSA, FPSA, and MFPA all converged to the same solution for both problem sets. shows the solutions for SRK with
Figure 2. Screened Rutherford Kernels.
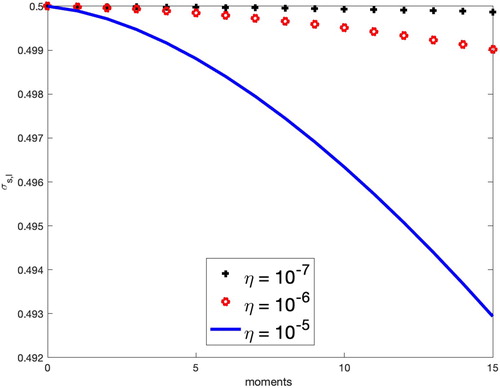
Figure 3. Results for SRK problems with
Runtime and iteration count are shown and . We see that MFPA and FPSA have comparable results, both tremendously outperforming DSA in runtime for all cases. We see a reduction in runtime and iterations for FPSA and MFPA as the FP limit is approached, with DSA requiring many more iterations by comparison as η approaches 0.
Table 2. Runtime and iteration counts for Problem 1 with SRK.
Table 3. Runtime and iteration counts for Problem 2 with SRK.
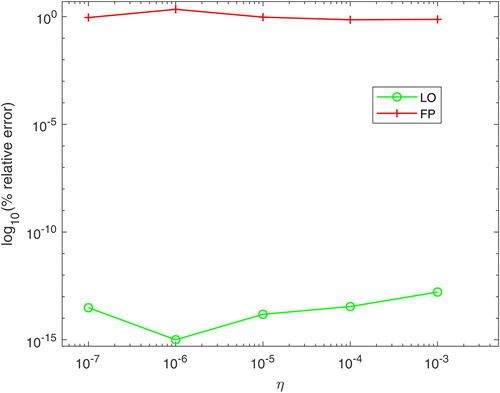
An advantage that MFPA offers is that the moments of angular flux in the LO equation will remain consistent with those of the transport equation even as a problem becomes less forward-peaked. On the other hand, the moments found using only the FP equation and source iteration lose accuracy. To illustrate this, Problem 1 was tested using different Screened Rutherford Kernels with increasing η parameters. The percent errors (relative to the transport solution) for the scalar flux obtained with the modified LO equation and with the standard FP equation at the center of the slab are shown in . It can be seen that the percent relative errors in the scalar flux of the FP solution is orders of magnitude larger than the error produced using the LO equation. The same trend can be seen when using the exponential and Henyey–Greenstein kernels.
Figure 4. Log scale of % relative error vs. η for Problem 1 at the center of the slab with SRK.
In and , we provide a comparison of MFPA with Picard iteration against MFPA, FPSA, and non accelerated transport using GMRES. Here, the convergence criterion for MFPA-Picard was changed to match that of the MATLAB GMRES function shown in EquationEquation (3.20)(3.20)
(3.20) .
Table 4. Runtime and iteration counts for Problem 1 with SRK.
Table 5. Runtime and iteration counts for Problem 2 with SRK.
We see that FPSA-GMRES, MFPA-Picard, and MFPA-GMRES drastically outperform GMRES in runtime and iterations. FPSA-GMRES and MFPA-GMRES have faster runtimes for most of the SRK problems tested. However, it is important to keep in mind that the setup time for all methods is not taken into account in these results. Setting up the preconditioners in FPSA-GMRES and MFPA-GMRES takes additional time. We note that MFPA-Picard is the fastest method overall.
3.2.2. EK: exponential kernel
The exponential kernel (Patel et al. Citation2020; Pomraning et al. Citation1992) is a fictitious kernel made for problems that have a valid Fokker–Planck limit (Pomraning Citation1992). The zero moment,
is chosen arbitrarily; we define
as the same zero
moment from the SRK. The Δ parameter determines the kernel: the first and second moments are given by
(3.22a)
(3.22a)
(3.22b)
(3.22b)
and the relationship for
is
(3.22c)
(3.22c)
As Δ is reduced, the scattering kernel becomes more forward-peaked.
The EK has a valid FP limit (Patel et al. Citation2020). Three different values of Δ were used to generate the scattering kernels shown in . GMRES, DSA, FPSA, and MFPA all converged to the same solution for problem sets 1 and 2. shows the solutions for EK with
Figure 5. Exponential Kernels.
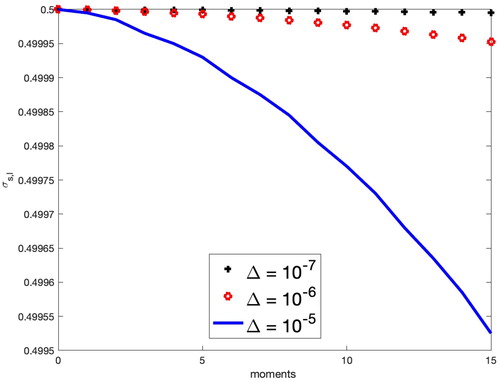
Figure 6. Results for EK Problems with
The runtimes and iterations for DSA, FPSA, and MFPA are shown in and . We see a similar trend with the EK as seen with SRK, in that smaller Δ values lead to a reduction in runtime and iterations for MFPA and FPSA, which greatly outperform DSA in both categories.
Table 6. Runtime and iteration counts for Problem 1 with EK.
Table 7. Runtime and iteration counts for Problem 2 with EK.
The comparison of runtimes and iterations of non accelerated transport, MFPA, and FPSA using GMRES against MFPA using Picard iteration with the updated convergence criterion for the Exponential Kernel are given in and .
Table 8. Runtime and iteration counts for Problem 1 with EK.
Table 9. Runtime and iteration counts for Problem 2 with EK.
We see a similar behavior to the SRK problems for runtimes and iterations of MFPA-Picard when compared to FPSA-GMRES, MFPA-GMRES, and non accelerated GMRES. Once again, we note that FPSA-GMRES and MFPA-GMRES require extra time for the setup of the preconditioner, adding more time to the results shown in the tables.
3.2.3. HGK: Henyey–Greenstein Kernel
The Henyey–Greenstein Kernel (Henyey and Greenstein Citation1941; Patel et al. Citation2020) is most commonly used in light transport in clouds. It relies on the anisotropy factor g, such that
(3.23)
(3.23)
As g goes from zero to unity, the scattering shifts from isotropic to highly anisotropic.
The HGK does not have a valid FP limit (Patel et al. Citation2020). The three kernels tested are shown in . GMRES, DSA, FPSA, and MFPA all converged to the same solution for problem sets 1 and 2. shows the solutions for HGK with g = 0.99. The results of each solver are shown in and .
Figure 7. Henyey–Greenstein Kernels.
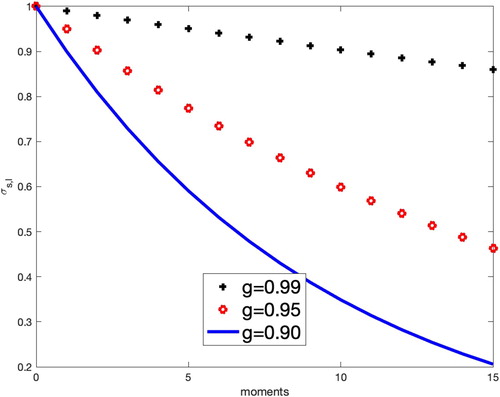
Figure 8. Results for HGK Problems with g = 0.99.
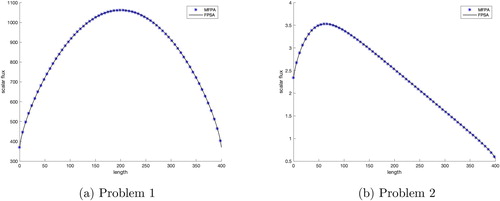
Table 10. Runtime and iteration counts for Problem 1 with HGK.
Table 11. Runtime and iteration counts for Problem 2 with HGK.
Here we see that MFPA and FPSA do not perform as well compared to their results for the SRK and EK. Contrary to what happened in those cases, both solvers require more time and iterations as the problem becomes more anisotropic. This is somewhat expected, due to HGK not having a valid Fokker–Planck limit. However, both MFPA and FPSA continue to greatly outperform DSA.
Once again, we compare runtimes and iterations of non accelerated transport, MFPA, and FPSA using GMRES against MFPA using Picard iteration with the updated convergence criterion, given in and .
Table 12. Runtime and iteration counts for Problem 1 with HGK.
Table 13. Runtime and iteration counts for Problem 2 with HGK.
HGK presents a similar trend compared to SRK and EK. FPSA-GMRES, MFPA-Picard, MFPA-GMRES all outperform non accelerated GMRES.
3.2.4. Heterogeneous problems
In order to test the accuracy of the method when dealing with interface conditions, we tested two heterogeneous slab problems. We use the same general parameters as in the previous sections, with the modification of 100 spatial cells, X = 100, and We setup the heterogeneous slab similar to the one in Pomraning (Citation2000), with a step function cross section given by
(3.24)
(3.24)
where ϵ is a constant. We consider the SRK with
and
the EK with
and
and the HGK with
and g = 0.99. The values of ϵ are chosen as −0.8, –0.4, 0.4, 0.8. We tested non accelerated GMRES and MFPA using finite element discretization and Picard iteration with the convergence criterion shown in EquationEquation (3.20)
(3.20)
(3.20) .
and show the SRK results for the heterogeneous slab problems tested. GMRES and MFPA converged to the same result. We expect to see a reflective relationship due to our choice of ϵ and definition of the cross section as a step function. MFPA showed no loss of accuracy in heterogeneous media using the SRK.
Figure 9. Results for heterogeneous Problem 1 using SRK with
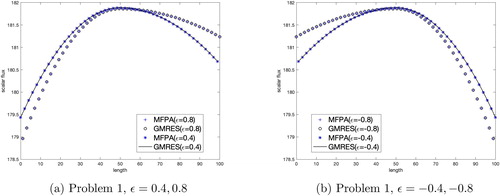
Figure 10. Results for heterogeneous Problem 2 using SRK with
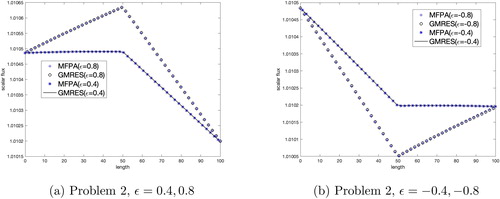
Figure 11. Results for heterogeneous Problem 1 using EK with
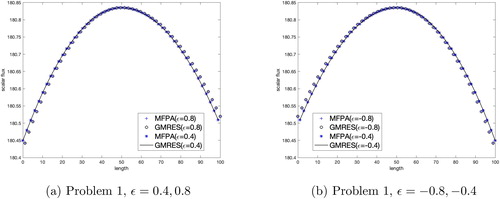
Figure 12. Results for heterogeneous Problem 2 using EK with
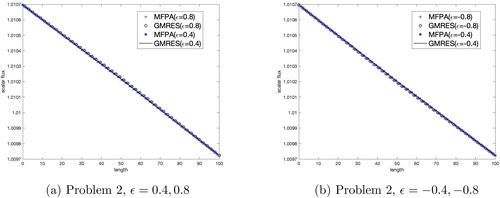
Figure 13. Results for heterogeneous Problem 1 using HGK with
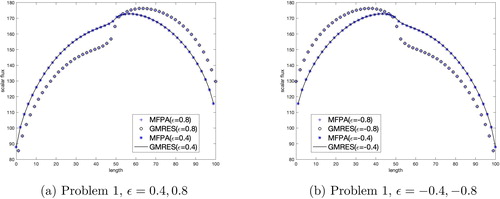
Figure 14. Results for heterogeneous Problem 2 using HGK with
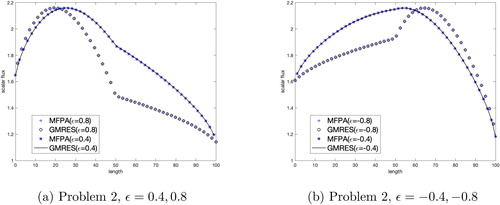
We see similar results in and when testing the EK in the heterogeneous slab problems. The changes in scalar flux are not as significant as in the SRK when using the step function cross section. The accuracy of the MFPA method in this heterogeneous slab has not been negatively affected.
We see interesting results in and when testing the HGK in the heterogeneous slab problems. Once again, MFPA and GMRES converged to the same solution, with MFPA having no loss of accuracy in the heterogeneous slab.
4. Angularly-discrete Fourier analysis for MFPA
In this section we analyze MFPA using angular-discrete Fourier analysis. Our goal is to theoretically determine how efficient the proposed method is through the spectral radius of the iteration matrix. This analysis closely follows the work done in Patel et al. (Citation2020).
We begin with rewriting Equations (Equation2.11(2.11a)
(2.11a) ) using source iteration, as
(4.1a)
(4.1a)
(4.1b)
(4.1b)
Subtracting the exact EquationEquations (2.11a)(2.11a)
(2.11a) and Equation(2.11b)
(2.11b)
(2.11b) from Equations (Equation4.1
(4.1a)
(4.1a) ) returns the error equations
(4.2a)
(4.2a)
(4.2b)
(4.2b)
where the error in the HO and LO angular flux are defined as
(4.3a)
(4.3a)
(4.3b)
(4.3b)
(4.3c)
(4.3c)
To perform Fourier analysis, we introduce the following Fourier mode ansatz for the HO and LO errors:
(4.4a)
(4.4a)
(4.4b)
(4.4b)
(4.4c)
(4.4c)
Substituting EquationEquations (4.4a)(4.4a)
(4.4a) and Equation(4.4c)
(4.4c)
(4.4c) into EquationEquation (4.2a)
(4.2a)
(4.2a) and simplifying, leads to
(4.5)
(4.5)
Next, we take the Legendre moment of EquationEquation (4.5)
(4.5)
(4.5) and use the orthogonality property of Legendre polynomials, which allows us to write
(4.6)
(4.6)
where
represents the LO flux moment error. Here, the flux moment error is defined as
(4.7)
(4.7)
We can now rewrite the integrals as weighted sums:
(4.8)
(4.8)
and further simplify this equation to get the HO matrix equation
(4.9)
(4.9)
Here, is part of the MFPA iteration matrix.
Similarly, substituting EquationEquations (4.4b)(4.4b)
(4.4b) and Equation(4.4c)
(4.4c)
(4.4c) into EquationEquations (4.2b)
(4.2b)
(4.2b) and simplifying returns
(4.10)
(4.10)
Now, we operate on EquationEquation (4.10)(4.10)
(4.10) by
rewrite the integrals as weighted sums, and use moment preserving discretization (MPD) (Warsa and Prinja Citation2012) for the Fokker–Planck in-scattering term
This yields the LO matrix equation
(4.11)
(4.11)
Finally, we combine EquationEquations (4.9)(4.9)
(4.9) and Equation(4.11)
(4.11)
(4.11) to obtain the final matrix equation
(4.12)
(4.12)
where
is the iteration matrix, such that its spectral radius determines the convergence rate of MFPA with MPD.
Next, we test the results of this analysis against our numerical results. The theoretical spectral radius (ρth) was tested using L = 15, and N = 16. The numerical spectral radius (ρnu) was tested for a homogeneous slab with vacuum boundaries and an isotropic source Q = 0.5 for
We used 200 spatial cells, X = 400,
L = 15, and N = 16. The 2-norm with a tolerance of
was used for convergence. shows the results for ρth and ρnu.
Table 14. Theoretical spectral radius results for MFPA.
We observe that the numerical and theoretical spectral radii are in close agreement for all kernels. We also compare the MFPA theoretical spectral radius for each kernel with the theoretical spectral radius of source iteration and FPSA, as shown in .
Figure 15. Results of ρth for SRK, EK, and HGK.
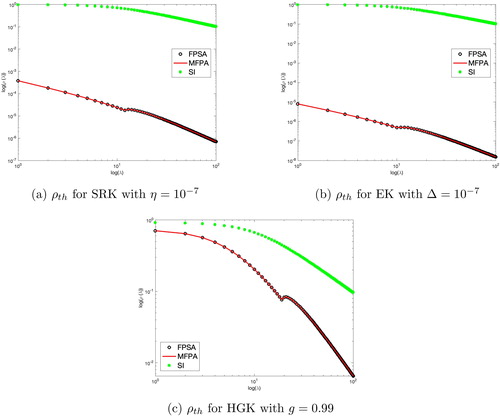
We see that the spectral radii of MFPA and FPSA are very close, which is expected due to the similarity of the methods. Both MFPA and FPSA have significantly smaller spectral radii compared to source iteration.
5. Discussion
This paper introduced the Modified FP Acceleration technique for steady-state, monoenergetic transport in slab geometry. Upon convergence, the modified FP and the transport models are consistent; in other words, the (lower order) modified FP equation preserves the moments of angular flux of the (higher order) transport equation.
MFPA was tested on both homogeneous and heterogeneous media with an isotropic internal source with vacuum boundaries, and with no internal source and an incoming beam in the left boundary. For both sets of problems, three different scattering kernels were used. The runtime and iterations of MFPA and FPSA were shown to be similar to each other, both vastly outperforming DSA for all cases by orders of magnitude. However, MFPA has the feature of preserving the moments of angular flux of the HO equation, which offers the advantage of integrating the LO model into multiphysics models.
MFPA, FPSA, and non accelerated transport using GMRES were compared to MFPA using Picard iteration. MFPA using both solvers and FPSA using GMRES notably outperformed non accelerated GMRES. Furthermore, although solver runtimes were similar for MFPA using both solvers and FPSA-GMRES, the setting up times of the preconditioners for the GMRES approaches were relatively large, making them slower overall than MFPA with Picard iteration.
Angularly-discrete Fourier analysis was performed on MFPA. The numerical and theoretical spectral radii were determined and found to be consistent. The MFPA theoretical spectral radii were compared with those of FPSA and source iteration.
In the future, we will investigate whether there is a formal mathematical relationship between FPSA and MFPA. We intend to test MFPA capabilities for a variety of multiphysics problems and analyze its performance. Moreover, we remark that in order to apply the proposed method to more realistic problems, it needs to be adapted to address geometries with higher order spatial dimensions. In future work, we will expand to more realistic problems as we continue to develop the method.
Acknowledgments
The authors would also like to thank Dr. James Warsa for his synthetic acceleration codes, and both Dr. Warsa and Dr. Anil Prinja for discussions involving Fokker–Planck acceleration. The statements, findings, conclusions, and recommendations are those of the authors and do not necessarily reflect the view of the U.S. Nuclear Regulatory Commission.
Additional information
Funding
References
- Adams, M. L., and E. W. Larsen. 2002. Fast iterative methods for discrete ordinates particle transport problems. Prog. Nucl. Energy 40 (1):3–159. doi:https://doi.org/10.1016/S0149-1970(01)00023-3
- Alcouffe, R. E. 1977. Diffusion synthetic acceleration for diamond-differenced discrete-ordinates equations. Nucl. Sci. Eng. 64 (2):344–55. doi:https://doi.org/10.13182/NSE77-1
- Aristova, E. N., and V. Y. Gol'din. 2000. Computation of anisotropy scattering of solar radiation in atmosphere (monoenergetic case). J. Quant. Spectrosc. Radiat. Transf. 67 (2):139–57. doi:https://doi.org/10.1016/S0022-4073(99)00201-0
- Carl, K. 2003. Solving Nonlinear Equations with Newton’s Method. Philadelphia: SIAM.
- Dixon, D. A., A. K. Prinja, and B. C. Franke. 2015. A computationally efficient moment-preserving Monte Carlo electron transport method with implementation in GEANT4. Ph.D. thesis, the University of New Mexico, Albuquerque. doi:https://doi.org/10.1016/j.nimb.2015.07.009
- Henyey, L. C., and J. L. Greenstein. 1941. Diffuse radiation in the galaxy. Astrophys. J. 93:70–83. doi:https://doi.org/10.1086/144246
- Khattab, K. M., and E. W. Larsen. 1991. Synthetic acceleration methods for linear transport problems with highly anisotropic scattering. Nucl. Sci. Eng. 107 (3):217–27. doi:https://doi.org/10.13182/NSE91-A23786
- Knoll, D. A., H. Park, and K. Smith. 2011. Application of the Jacobian-free Newton-Krylov method to nonlinear acceleration of transport source iteration in slab geometry. Nucl. Sci. Eng. 167 (2):122–32. doi:https://doi.org/10.13182/NSE09-75
- Lewis, E. E., and W. F. Miller, Jr. 1993. Computational methods of neutron transport. La Grange Park, IL: American Nuclear Society.
- Martin, W. R. 1976. The application of the finite element method to the neutron transport equation. Ph.D. thesis., The University of Michigan, Ann Arbor, MI.
- MATLAB, version 9.3.0.713579 (R2017b). 2017. The MathWorks Inc., Natick, Massachusetts.
- Patel, J. K. 2016. Fokker–Planck-based acceleration for SN equations with highly forward-peaked scattering in slab geometry. Ph.D. thesis., The University of New Mexico, Albuquerque, NM.
- Patel, J. K., H. Park, C. R. E. de Oliveira, and D. A. Knoll. 2014. Efficient multiphysics coupling for fast burst reactors in slab geometry. J. Comput. Theor. Transp. 43 (1–7):289–313. doi:https://doi.org/10.1080/00411450.2014.915222
- Patel, J. K., R. Vasques, and B. D. Ganapol. 2019. Towards a multiphyiscs model for tumor response to combined-hyperthermia-radiotherapy treatment. In Proceedings of International Conference on Mathematics & Computational Methods Applied to Nuclear Science & Engineering, Portland, OR, August 25–29.
- Patel, J. K., J. S. Warsa, and A. K. Prinja. 2020. Accelerating the solution of the SN equations with highly anisotropic scattering using the Fokker–Planck approximation. Ann. Nucl. Energy. 147:107665. doi:https://doi.org/10.1016/j.anucene.2020.107665
- Pomraning, G. C. 1992. The Fokker–Planck operator as an asymptotic limit. Math. Models Methods Appl. Sci. 2 (1):21–36. doi:https://doi.org/10.1142/S021820259200003X
- Pomraning, G. C. 2000. The screened Rutherford pencil beam problem with heterogeneities. Nucl. Sci. Eng. 136 (1):1–14. doi:https://doi.org/10.13182/NSE00-A2144
- Pomraning, G. C., A. K. Prinja, and J. W. VanDenburg. 1992. An asymptotic model for the spreading of a collimated beam. Nucl. Sci. Eng. 112 (4):347–60. doi:https://doi.org/10.13182/NSE92-A23983
- Saad, Y., and M. H. Schultz. 1986. GMRES: A generalized minimal residual algorithm for solving nonsymmetric linear systems. SIAM J. Sci. Stat. Comput. 7 (3):856–69. doi:https://doi.org/10.1137/0907058
- Turcksin, B., J. C. Ragusa, and J. E. Morel. 2012. Angular multigrid preconditioner for Krylov-based solution techniques applied to the Sn equations with highly forward-peaked scattering. Transp. Theory Stat. Phys. 41:1–22.
- Warsa, J. S., and A. K. Prinja. 2012. A moment preserving SN discretization for the one-dimensional Fokker–Planck equation. Trans. Am. Nucl. Soc. 106:362–5.