
 ?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.
?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.Abstract
In the field of minimally invasive interventional therapy, the related research on the soft tissue puncture robot and its technology based on the flexible steerable needle as a research hot topic at present, and it has been developed rapidly in the past ten years. In order to better understand the development status of the flexible steerable needle puncture (FSNP) robot and provide reference for its design and improvement in subsequent research, it is necessary to introduce in two aspects of FSNP robot: the puncture path planning and the control methods. First, this article introduced the concept of the FSNP technology, and the necessity of the application of FSNP soft tissue robot in minimally invasive interventional surgery. Second, this article mainly introduced the principle of FSNP, the path planning of FSNP, the navigation and positioning control of the needle tip of the flexible steerable needle, the control method of FSNP system, and the controllable flexible needle. Finally, combined with the above analysis and introduction, it was pointed out that FSNP soft tissue robot and its related technology would be an important development direction in the field of minimally invasive interventional therapy in the future, and the current existing problems were pointed out. Meanwhile, the development trend of FSNP robot control technology was summarized and prospected.
1. Introduction
Interventional paracentesis is a minimally invasive therapy with very broad application prospects, which can be applied to the most organs of the human body, such as prostate, breast, liver, lung and brain, etc. At present, rigid straight needle as a conventional needle is mostly used in puncture operations (Special medical puncture steel needles are generally semi-flexible needles with a little flexibility), because this conventional needle has no higher flexibility, it can only travel and orient along a straight path. For clinical operations such as prostate biopsy, brachytherapy interventional therapy and thermal ablation therapy, due to the structural complexity of human tissue and the inability of this conventional needle to bypass obstacles, it is difficult to achieve targeted puncture of deep parts of the human body [Citation1,Citation2]. Meanwhile, when a conventional needle is used to perform a puncture operation, accidental displacement, tissue deformation, the slight bending of the needle body under force, and movement error of the puncture needle are prone to occur in human organs. These conditions will cause the puncture needle to deviate from the target and fail to reach the target position accurately. In this case, the general treatment method using rigid puncture needles is to remove the needle from the body and puncture again, or to correct the position and posture of the needle in the body by operating the tail of the needle rigidly. This will cause human tissues and organs to be subjected to greater squeezing, pushing and pulling effects. Both of these methods will cause more pain to the patient, and even cause a certain degree of damage to the tissues and organs; In addition, some organs and tissues of the human body are relatively hidden and may be ‘hidden’ behind bones or other organs. For example: when doctors perform interventional treatment for the prostate through the perineum, the pubic bone will cover a part of the prostate, forming a ‘protection’ and it is difficult to achieve interventional therapy; In addition, some important nerves, arteries and blood vessels and some important tissues also need to be avoided at any time. For example, combined with the empirical information provided by clinicians in the department of brain oncology, Hailun People’s Hospital Suihua City Heilongjiang Province, China, when a brain biopsy is performed, there are abundant nerves and blood vessels in the brain, which are inevitably blocked on the puncture path. So, it is necessary to ensure that the puncture needle accurately reaches the target point, but also to avoid the nerves and blood vessels in the puncture path as much as possible to reduce damage. Although some scholars have proposed a ‘bent steel needle (Its inner and outer needles are curved needles with the same curvature, and the overall degree of curvature of the needle body is adjusted by the rotation angle between the inner and outer needles)’ idea to achieve non-linear puncture; but it is difficult to achieve the expected results, and the operation is difficult, it is easy to cause mistakes and cause injury to the patient [Citation3]. Therefore, in these situations, a rigid straight needle or bent steel needle cannot meet the requirements; So the flexible steerable needle that can achieve bending control can be used for surgery in clinical practice.
During the operation of puncture surgery, in order to solve the puncture problem of correcting puncture deviation and bypassing obstacles in the path, related researchers had been carried out on many different forms of ‘controllable flexible needle’, thereby the concept of the operation of soft tissue puncture based on the flexible steerable needle was proposed [Citation4,Citation5]. The meaning of this concept is: In the process of puncturing soft tissues, when the bevel at the tip of the flexible steerable needle is subjected to the reaction force from the soft tissue, the needle body is easy to bend and deform, and the puncture path planning and appropriate control methods are used to achieve the purpose of changing the puncture path in real time, and then the ideal positioning effect can be achieved during puncture. According to the concept, the puncture needle is required to achieve bending control with large curvature; Although the conventional needle itself has a certain degree of flexibility, but its own rigidity is very high (Its elastic modulus is about 1.9 × 1011N/m2), which makes it difficult to achieve bending control with large curvature and complete specific path planning tasks in the limited puncture space; Therefore, this requires the puncture needle to have a lower stiffness to meet its own flexibility, and it is more convenient to achieve flexible control of large curvature bending than a conventional needle. So, this puncture needle is generally made of special materials such as nickel-titanium alloy (Its elastic modulus is about 2 × 1010N/m2, which is much smaller than a steel needle), which has good flexibility, bendability and suitable steerability, and is easy to achieve targeted control; Therefore, the the operation of soft tissue puncture based on the flexible steerable needle has become a hot topic in the field of percutaneous intervention [Citation6–8]. Meanwhile, The flexible steerable needle is controlled by a robot, and the ability of the robot’s dexterous operation is combined with the good elasticity and bending ability of the flexible steerable needle to achieve precise motion control of the puncture position, posture, and puncture trajectory. So, it is necessary to study the flexible steerable needle puncture (FSNP) robot and its related technology.
FSNP technology is developed on the basis of traditional rigid puncture needle technology. The concept was proposed late, and there are not many studies on it. The following would combine the concept of FSNP system to summarize the existing flexible steerable needle control method developed, including the following five parts: Principle of puncture, path planning, needle tip navigation and positioning control, control method of FSNP system and controllable flexible needle. This article mainly analyzed and introduced the research of motion planning and control of FSNP robot, aiming to improve the medical level of minimally invasive interventional surgery and promote the development of minimally puncture medical technology. Meanwhlie, it is also to better understand the development status of the flexible steerable needle puncturing robot, so as to provide reference for its design and improvement in subsequent research.
2. Introduction to principle of puncture
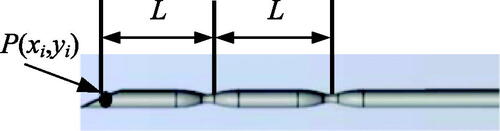
The needle body of the flexible steerable needle has high flexibility, and its end has a bevel tip. When the flexible steerable needle enters the soft tissue, its bevel tip will be subjected to the lateral reaction force of the tissue. This lateral force causes the needle tip to deflect, which causes the needle body to bend, thus puncturing the arc path. This puncture method of the flexible steerable needle is obviously different from the conventional needle. The FSNP robots generally have two degrees of freedom, one is the feed motion, and the other is the rotation motion around the needle axis. Among them, the feed motion is to realize the needle puncture, and the rotation motion is to change the bending direction of the puncture needle, which is similar to the bicycle model [Citation9–11]. When the bicycle is moving forward (It can also mean the flexible steerable needle moving forward), turn its steering wheel (Rotating needle shaft), and it will take a curved path.
shows the Unicycle model, and the model is expressed as the kinematic model of the flexible steerable needle during the puncture process. In the inertial coordinate system axyz, the needle point is fixedly connected to the axle of the unicycle, and the object coordinate system a1y1z1 is fixedly connected to the needle tip. The z-axis points to the direction of movement along the center line of the needle shaft, and the y-axis points to the outer normal direction of the curved arc. And the x-axis, y-axis, and z-axis conform to the right-hand rule. During puncture, due to the lateral force of the soft tissue on the bevel of the needle tip, the needle tip is deflected, so that the needle tip will have an angular velocity along the x-axis to drive ωx to produce:
(1)
(1)
Figure 1. Unicycle Kinematics Model. axyz is the inertial coordinate system; u1 represents the feed movement of the flexible steerable needle; u2 represents the rotation movement of the flexible steerable needle; a1y1z1 is the coordinate system of the needle tip at t1, a2y2z2 is the coordinate system of the needle tip at t2; o1 is the arc trajectory of the flexible steerable needle at t1, the radius is r; o1 is the arc trajectory of the flexible steerable needle at t2, the radius is r; ωx represents the rotational angular velocity of the needle tip along the x-axis of the inertial coordinate system.
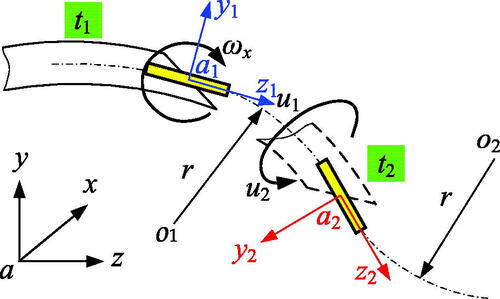
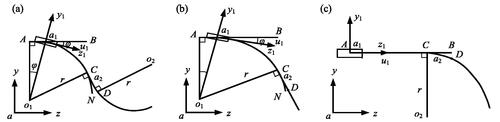
Figure 2. Elastic changes in various path forms. (a) RR path form; (b) RL path form; (c) LR path form.
It can be seen from EquationEquation (1)(1)
(1) that the path form of Unicycle is related to the combination of radius and two inputs. The motion trajectory function P is:
(2)
(2)
If the control parameters u1 and u2 are separated from the function P, the trajectory function P can be simplified to:
(3)
(3)
Because its movement is restricted, it cannot realize any form of path. However, the coordinated control of the two motions can achieve a certain spatial position and posture, and puncture a unique path (RR, RL, LR, etc.), as shown in .
Therefore, most of the researchers’ research on puncture path planning, needle tip navigation and control methods of flexible steerable needles are mainly based on the theory of Unicycle model. Meanwhile, in addition to the Unicycle model, some researchers have also studied the above content based on the finite element model, and also achieved fruitful results [Citation12–18].
3. Path planning
The motion control of the flexible steerable needle is based on the puncture path planning of the flexible steerable needle. Therefore, the research of related planning theory and planning algorithm is a very basic but core problem. The purpose of FSNP path planning is to find the best puncture trajectory and the movement speed of the needle tail under various constraints. At present, the research scope of FSNP path planning is very wide. According to the dimension, it can be divided into two-dimensional (2D) and three-dimensional (3D) path planning (Where, the choice of 2D or 3D path planning is mainly based on the use of different medical influencing equipment. In general, 2D path planning is used for two-dimensional ultrasound, CT, X-ray and other equipment; 3D path planning is used for three-dimensional ultrasound, MRI and other equipment). Divided by planning algorithm, it can be mainly divided into path planning algorithm based on numerical calculation (referred to as ‘numerical method’) and path planning algorithm based on search algorithm (referred to as ‘search method’), etc.
3.1. Path planning algorithm based on numerical calculation
The numerical method is mainly to find the optimal solution. The advantage of this method is that it can find the optimal path by solving the maximum value (Or minimum value) of the function, and obtain the global or local optimal solution. However, the numerical method has the problems of long calculation time and slow convergence speed, and the solution to the numerical method is affected by whether the initial value selection is reasonable. Where, numerical methods include probability calculation method and objective function method.
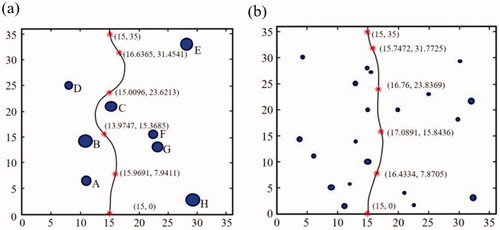
Alterovitz et al. [Citation19] of the University of California proposed the 2D path planning algorithm for the flexible steerable needle based on the finite element model of the flexible steerable needle. This algorithm can design a non-linear objective optimization function with short path, high accuracy, simple algorithm and feasible path without puncturing important organs such as bones and blood vessels. In the same year, they considered that the puncture process of the flexible steerable needle is probabilistic, so they used the ‘Markov Decision Process’ (MDP) method to propose an obstacle avoidance puncture path planning algorithm for the flexible steerable needle. The optimization result is obtained by calculating the maximum probability of the needle reaching the target point, thereby realize the best puncture path of the flexible steerable needle in the soft tissue of the 2D space, as shown in [Citation20,Citation21].
Figure 3. Path optimization using “Markov” decision-making process. (a) Before decision; (b) After decision.
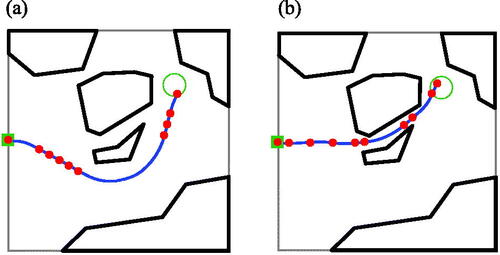
Figure 4. Path optimization using reachable probability density function. (a) Reachable probability density function; (b) Path optimization result.
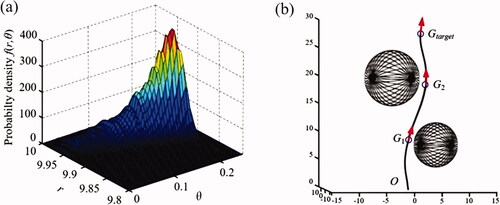
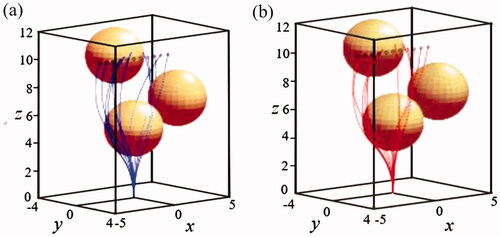
In 2005, Park et al. [Citation22,Citation23] of Johns Hopkins University in the United States proposed a kinematics model based on a similar unicycle, which established the probability density function by introducing Gaussian white noise at the input (As shown in ), the puncture path can be planned by calculating the probability density function of the reachable area of the needle tip (As shown in ), thereby extending the flexible steerable needle path planning to three-dimensional space. In 2010, they established a feedback control method. They further improved the reachable probability density function by adding reference line variables to the needle-point controllable random model. By introducing spline variable functions into the probability algorithm, they solved the planning problem with complex environments [Citation24,Citation25]. However, this method has calculation errors.
Figure 5. Puncture planning of three-dimensional obstacle environment. (a) Stop-turn; (b) Spiral line.
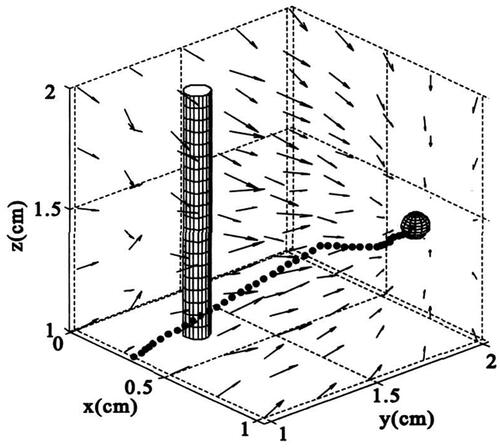
In 2008, Duindam et al. [Citation26] of the University of California, Berkeley, based on a single-wheel vehicle model similar to a three-dimensional path, constructed an optimization objective function based on many variables, and reduced the amount of complex calculations; Its model variables include: Needle tip deviation, duty cycle of advance-revolution speed, path length. This function uses respectively the ‘S’ type path (The arc path produced by the needle ‘stop-turn’ motion form) and the ‘spiral line’ path (The puncture movement and the rotation movement of the flexible steerable needle are carried out at the same time). Meanwhile, in the presence and absence of obstacles, the path planning and comparison are performed, as shown in .
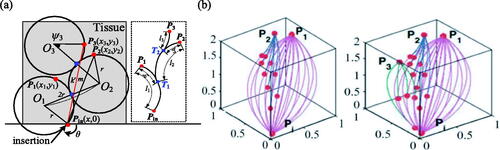
In 2009, Sadati et al. [Citation27] of the University of British Columbia planned the path by using the method of Liapunov energy function, designed different factors to construct the optimization function equation, applied the combined path strategy, and optimized the path algorithm by using the neural network method. In 2011, Zhang, Zhao et al. [Citation28,Citation29] of Harbin University of Science and Technology proposed a kind of based on improved cycling model, and introduce the concept of degree of control, with minimal trauma (shortest path), the most secure, minimum deformation and control cost minimum multi-goal optimization objective function, use a variety of forms to the path of the combination method of forward and reverse optimization respectively, and at the same time consider into the needle point and the attitude of optimization, improve the performance of FSNP. In 2014–2015, Lee et al. [Citation30,Citation31] on the basis of the Park algorithm, analyzes the probability of the middle of the path algorithm to generate candidate paths are not enough, lead to the resulting path curve is not smooth, even the phenomenon of cannot reach the target, through the use of fuzzy logic method, continuous search is used instead of discrete search to obtain a continuous set of intermediate paths from discrete candidate paths. A probabilistic path algorithm based on fuzzy logic can generate a smoother path, but at the same time it will increase the calculation time. In 2014, Bobrenkov et al. [Citation32] proposed an algorithm for inserting flexible steerable needle to travel from a single insertion point to multiple targets. The degree of tissue damage is expressed as a function of construction loss cost, which is positively related to the needle penetration depth. Multiple target points are reached by controlling the combination of insertion, partial retraction, rotation and re-insertion of the flexible steerable needle, as shown in .
Figure 6. The strategy of needle tip reaching multiple targets. (a) 2D environment adjustment strategy; (b) 3D environment adjustment strategy.
In 2014, Sun and Alterovitz et al. [Citation33] considered the uncertainty of needle movement and system state perception, represented the flexible steerable needle steering problem under the uncertain state by partially observable Markov decision process (POMDP), and calculated the optimal trajectory and control strategy in the execution space. In 2015, Huo et al. [Citation34] took puncture accuracy puncture risk, and puncture path length as FSNP optimization targets according to the requirements of the minimally invasive interventional surgery, and transformed FSNP path planning problem into a multi-objective optimization problem, and using multi-objective Optimize function and dynamic weighting method, and use particle swarm algorithm (PSO) to find the optimal solution.
In 2018, Tan et al. [Citation35] proposed a method for FSNP trajectory planning based on an improved Markov decision process, which considered the influence of tissue deformation on trajectory planning, the influence of needle insertion angle on insertion success rate, and the influence of the uncertainty of the trajectory of the flexible steerable needle caused by the force of the tissue and the needle. Compared with the traditional Markov decision algorithm, the control strategy generated by the improved algorithm is safer and more stable. In the case of complex and uncertain forces, it can find the trajectory that has the greatest probability of avoiding obstacles and successfully inserting the target.
Among them, the path planning methods based on numerical calculation are divided according to dimension and compared according to their advantages and disadvantages, as shown in .
Table 1. Path planning algorithm based on numerical calculation.
3.2. Path planning algorithm based on search algorithm
Search algorithm refers to finding all feasible paths through computer random sampling or artificial intelligence search. Compared with numerical programming methods, its advantages are fast running speed and less time; its disadvantage is that the path is not necessarily the optimal solution, it may be a sub-optimal solution. Search methods mainly include random road marking method (PRM), rapid exploration random tree method (RRT) and artificial intelligence method (AI).
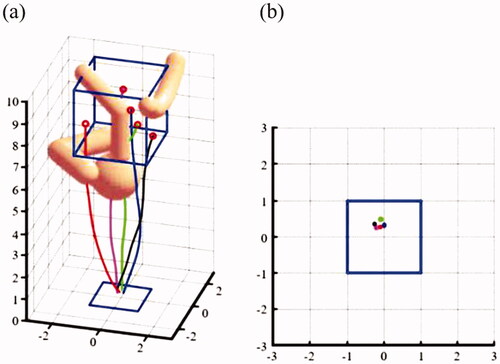
In 2008, Xu et al. [Citation36] used the RRT algorithm to plan a feasible path in the three-dimensional obstacle space state, and optimized the needle entry point according to the reversibility of the path. In the second year, they expanded their research to the path planning problem of multiple needle puncture and multiple target points, which increased the selectivity of planning and optimized the puncture path, but it also caused a sharp increase in calculations, which was not conducive to real-time planning [Citation37]. Shown in .
Figure 7. RRTs algorithm proposed by Xu. (a) Front view; (b) Top view.
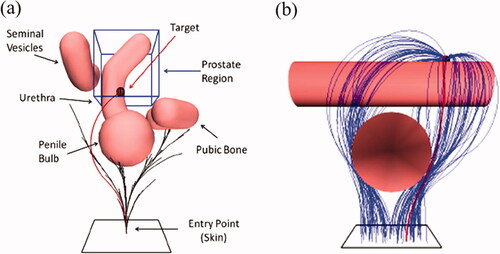
In 2009, Sadati and Torabi took brain tissue as the research object, and with the help of image navigation equipment, the flexible steerable needle was punctured in a 2D environment through a fuzzy control strategy (Artificial intelligence method.) [Citation38]. In 2010–2014, Patil et al. [Citation39] introduced accessibility navigation and target-biasing algorithms to search for feasible paths in a three-dimensional obstacle space environment based on Xu’s research, which accelerated the calculation speed by 2–3 orders of magnitude, greatly shortened the calculation time and improved the interactivity of the algorithm, as shown in . Later, on the basis of RRT algorithm, they further proposed a new needle steering algorithm for Real-time path planning, it can automatically reach the target in a 3D environment while avoiding obstacles and compensating for real-world uncertainties [Citation40].
Figure 8. Patil’s improved RRT algorithm. (a) Front view; (b) Side view.
In 2011, Alterovitz et al. [Citation41] proposed a fast search roadmap method for path planning of FSNP soft tissues. The RRT algorithm and PRM algorithm were used to weigh whether to continue the search or extract the current optimal path through the parameters set by the user. In 2012, Caborni et al. [Citation42] designed a path risk assessment function from the perspective of clinical surgery risks and doctors prolonged work fatigue. Combined with the rapid search road marking method (PRM), and on the premise of keeping a safe distance between the control route and obstacles such as blood vessels and nerves, the optimal route was selected by shortening the length of the route and reducing the number of bends. In 2014, Bernardes et al. [Citation43,Citation44] based on medical image recognition needle trajectory as closed-loop feedback combined with the Motion re-planning algorithm and artificial intelligence method based on ‘input sampling’ to compensate for system uncertainty and interference, and improve puncture accuracy degree, in a two-dimensional environment. In the same year, Moreira et al. [Citation45] used ultrasound images to estimate curvature online, and based on RRT algorithm for path planning, which improved the accuracy of uneven tissue trajectory planning. In the same year, Gustaaf et al. [Citation46] also obtained the needle tip pose based on two-dimensional ultrasound images, as feedback for closed-loop control, continuously corrected the planned path based on the RRT algorithm, and corrected the positions of obstacles and target points in order to improve the puncture accuracy. In 2015, Xiong used an improved RRT algorithm to re-optimize the needle entry point, and then introduced a path evaluation function to optimize all the searched routes to find the optimal path [Citation47]. In 2017, Huang Cheng et al. [Citation48] used the vector intrinsic finite element method (VFIFE) and finite element method (FEM) to calculate the deformation of the needle and the tissue, and constructed a needle-tissue interaction model. And based on this model for path planning, using the rapid exploration random tree algorithm based on artificial potential field (PF-RRT) to plan the puncture path of the flexible steerable needle. In the same year, Li Xia et al. [Citation47] used the RRT algorithm to plan the path in consideration of environmental characteristics, considering the size, location, number of obstacles and interference factors on the path, etc., tested the reasonable weight coefficients of different factors, and then passed the evaluation function Calculate the optimal path in a two-dimensional obstacle environment. As shown in .
Figure 9. Planning strategy based on risk level. (a) Test 1; (b) Test 2.
In 2018, Fauser et al. [Citation49] used the two-way rapid exploration random tree (RRT-Connect) algorithm to plan the path before and during the operation of minimally invasive surgery based on the flexible steerable needles, respectively. Compared with the one-way RRT algorithm, it has good search properties and higher efficiency.
Among them, the path planning methods based on search algorithm are divided according to dimension and compared according to their advantages and disadvantages, as shown in .
Table 2. Path planning based on search algorithm.
3.3. Other path planning algorithms
In addition to the above two common path planning algorithms, other path planning algorithms mainly include inverse solution method, artificial potential field method, geometric graphic method, data induction method and so on. They are mainly used for specific occasions and preoperative planning.
In 2008, Duindam et al. [Citation51] planning by using the method of inverse solution of FSNP path, specific idea is to simplify the needle trajectories under the three dimensional space into the two line puncture of two-dimensional plane, with two vertical planes intersecting line at some point to join points to two curves, but this kind of algorithm is one-sided, is suitable for the characteristics of environment planning.
Subsequently, in 2011, Wang et al. [Citation52] adopted a similar idea to Duindam, which was to convert a three-dimensional path into a 2D path connection to implement path flexible steerable needle path planning, and based on this method, proposed a 3D dynamic path planning algorithm [53]. In 2010, Jiang et al. [Citation54] planned the path of FSNP soft tissue based on artificial potential field algorithm, as shown in .
Figure 10. Path planning based on artificial potential field method.
Hu [Citation55] and Li [Citation56] proposed a geometric graphic method, which uses an S-shaped double-arc path planning algorithm to bypass obstacles. The main idea is to use the tangent method for global planning, limit the puncture area of the plane where the needle, obstacle, and target point are located, and then adjust the local planning path, which is completed by the equilateral needle insertion of the arc inscribed with the polygon. In 2014, Khosrosereshki et al. [Citation57] proposed the ‘N + 1 point’ method and the ‘three point’ method in order to simplify the difficulty of flexible steerable needle path planning in three-dimensional space. Where, the ‘N + 1 point’ method is to divide the path into n parts to avoid obstacles and move toward the target; the ‘three-point’ method is to divide the puncture path into two walking segments (the starting point, a point near the obstacle, and the final target point, which together form two segments).
In 2014, Li et al. [Citation58,Citation59] proposed a trajectory planning algorithm combining artificial potential field method and improved conjugate gradient method. The improved conjugate gradient method and the artificial potential field method are combined to avoid the defect that the artificial potential field method is easy to fall into the dead zone. In 2016, Hamze et al. [Citation60] proposed a preoperative online path planning algorithm called Haystack (HST). The function of this algorithm includes simulating tissue and needle deformation, and iterative optimization to obtain feasible puncture paths with close to exhaustive accuracy. At the same time, the algorithm can further to consider the deformation caused by more factors, such as the deformation caused by breathing. In 2017, Rossa et al. [Citation61] proposed a data-driven flexible steerable needle modeling method. When a new insertion is performed, the instant learning method estimates the model output based on the current input in the historical database.
Among them, other path planning algorithms are divided according to dimension and compared according to their advantages and disadvantages, as shown in .
Table 3. Path planning based on other algorithms.
4. Needle tip navigation and positioning control
In order to accurately to perform FSNP, the positions of the tip and the target points must be obtained in real time. Therefore, computer vision technology must also be used to realize the navigation and positioning of the tip [Citation62], and online planning of the puncture path, and then drive FSNP. The following is an introduction to the navigation and positioning of the needle tips of the flexible steerable needle.
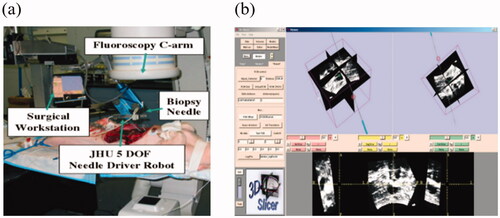
Needle tip navigation and positioning as the primary problem that needs to be solved in FSNP. Imaging modalities currently available for navigating FSNP are: X-ray, B-mode ultrasound, computed tomography (CT), magnetic resonance imaging (MRI), etc. Scientists from various countries have done a lot of research on these types of navigation methods and have achieved some important research results. However, various internal and external factors will affect the positioning accuracy of the needle tip. Hing et al. [Citation63] used a machine structure with two orthogonal C-arms, combined with X-rays imaging equipment for navigation, which could obtain the position of the needle tip of the flexible steerable needle in the plane of the soft tissue for positioning. However, the device itself has mechanical errors, and during X-ray imaging, the images of the metal needle body at different depths overlap each other, so this will cause inaccurate measurement. In response to this shortcoming, Glozman et al. [Citation64] adopted a 6-DOF parallel robot control system based on RSPR(RSPR represents the configuration of the robot; Among them, R is the rotation pair, P is the degree of movement, S is the ball pair), As shown in ; Meanwhile, a dual binomial correction algorithm is proposed to control to compensate for its mechanical error and image error of X-ray positioning of needle tip, so that the puncture effect of the flexible steerable needle was significantly improved.
Figure 11. RSPR 6-DOF parallel robot control system.
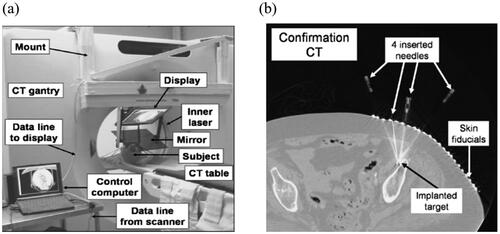
Meanwhile, CT is a more advanced X-ray imaging technology that can accurately realize the three-dimensional positioning of the needle tip. Fichtinger et al. [Citation65] proposed an image overlay system for the flexible steerable needle insertion process in computed tomography (CT) (As shown in ) to help the needle insertion process in computed tomography (CT) scanners. The device includes a display and a translucent mirror mounted on a gantry. Observing the patient through a mirror, the CT image appears to be floating in the patient’s body, with the correct size and position, thus providing the doctor with two-dimensional (2-D) ‘X-ray vision’ to guide the insertion of the flexible steerable needle, improving the puncture arccuracy of the flexible steerable needle.
Figure 12. CT image overlay system for flexible steerable needle insertion process. (a) Overall system figure; (b) CT image identified by localization of bone biopsy.
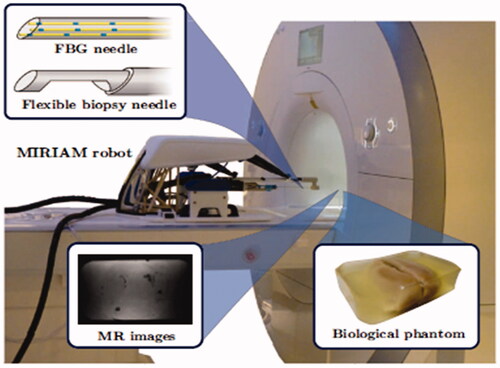
In addition, Krieger et al. [Citation66,Citation67] used MRI technology to navigate FSNP and carried out prostate intervention surgery. Prostate tissue is inevitably deformed, and the imaging speed of MRI is slightly delayed, which seriously affects the imaging accuracy of MRI. To this end, Tadayyon et al. [Citation68] adopted an MRI-guided prostate needle biopsy device, which used multi-frame images for three-dimensional registration to compensate for the organ movement between target planning and needle placement, and the needle tip positioning measurement accuracy of the flexible steerable needle is improved. Moreira et al. [Citation69] designed a robot-assisted FSNP device that combines magnetic resonance images and fiber grating sensors, as shown in . The MRI image detects the location of the target and the obstacle, and performs preoperative planning. The optical fiber sensor calculates the position of the needle tip of the flexible steerable needle during the insertion process by measuring the strain, and the model is fed back to the controller to complete the closed-loop control.
Figure 13. MRI-based FSNP equipment.
Compared with MRI and CT equipment, B-mode ultrasound is more economical and safer, and has many applications in puncture navigation and positioning [Citation70–73]. However, this needs to solve the noise problems such as echo, air pockets and speckles during imaging, and perform denoising and noise reduction processing on the image. Therefore, Aboofazeli et al. [Citation70] proposed a noise reduction method of refractive diffusion filtering and nonlinear partial differential smoothing. However, the needle tip of the flexible steerable needle will deflect during the puncture process, and the needle tip will therefore not be in the ultrasound scanning plane. In order to keep track of the needle tip position continuously, Zhu et al. [Citation71] used the slice tensor product interpolation method to establish a description model of the needle tip trajectory lost by the flexible steerable needle during puncture. Boctor et al. [Citation72] used ultrasound to carry out puncture experiments (As shown in ), and the resulted clearly showed that robot-assisted puncture did improve puncture accuracy.
Figure 14. Three-dimensional ultrasound guided robot puncture needle placement system. (a) Experimental institution; (b) 3D ultrasonic interface.
Neubach et al. [Citation73] established a closed-loop ultrasound image control system with updated stiffness (As shown in ) to identify the position of the needle tip of the flexible steerable needle under the ultrasound image. First, the threshold was used to binarize the image, and then the central part of the needle tip was identified, and a comparative analysis (As shown in ) was carried out. Experiments showed that this method can achieve an accuracy of 0.85 mm in the axial direction and 0.36 mm in the transverse direction. In addition, Neshat et al [Citation74] used 3D ultrasound to reconstruct tissue images, and ‘Hough changes’ were used to identify the flexible steerable needles in the tissue.
Figure 15. Diagram of closed-loop ultrasound image control system with updated stiffness.
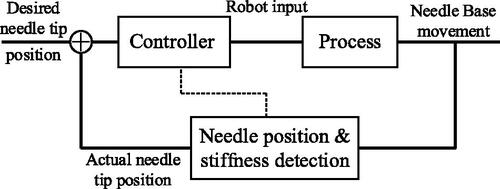
Figure 16. Comparative analysis. (a) Open loop; (b) Closed loop; (c) Closed loop with updated stiffness.
Among them, this article summarized the advantages and disadvantages of various medical image navigation methods in the application of the needle tip of the flexible steerable needle positioning, as shown in .
Table 4. Performance comparison of various ways of navigation.
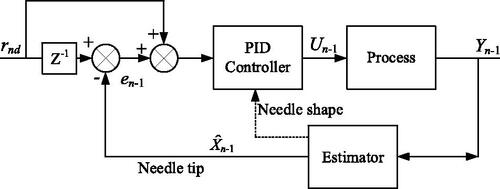
5. Control method of flexible steerable needle puncture system
After using computer vision technology to locate the target point, the doctor needs to complete the puncture task according to the planned path through FSNP control system, so the FSNP control is a decisive factor that affects the final puncture effect and treatment effect. The current puncture control methods are divided into two categories: The first is the method of the remote control operation; the second is the method of the autonomous control. Where, the robot’s autonomous control puncture method is the ultimate goal of FSNP technology.
5.1. Remote control operation method
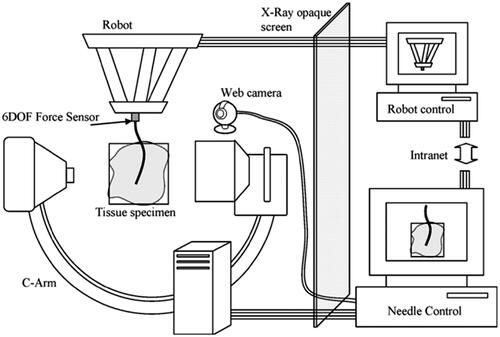
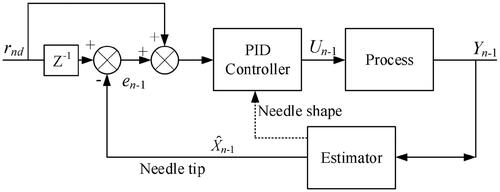
The remote control operation mode is mainly used by doctors to complete the control of needle tip feeding and rotation by operating the main manipulator of the robot through the master-slave manipulator system at the end position of the remote manipulator [Citation85]. Glozman et al. [Citation64] used the traditional PID algorithm to control the 3D movement of the needle tail of the flexible steerable needle. The control block diagram is shown in . Its advantages are: simple principle, convenient control, strong robustness and independent of the specific model of the system. The input of the controller is the needle tip puncture error, and the control gain depends on the elastic modulus of the needle and other related parameters. However, the process of puncturing the soft tissue with the flexible steerable needle will be disturbed by the compound force, so the traditional PID control cannot meet the puncture performance well.
Figure 17. Needle tail puncture control block diagram.
At the same time, Duchemin et al. [Citation86]. proposed a PI controller to realize the hybrid position/force control of the robot terminal (As shown in ).
Figure 18. Force/position hybrid control block diagram.
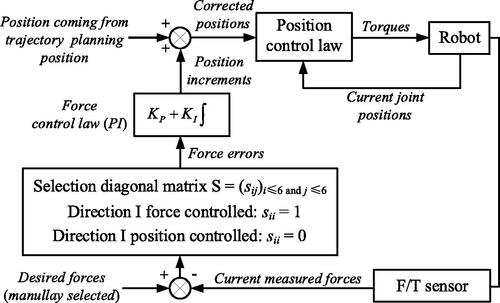
The controller can complete the machine system to control the needle entry posture of the flexible steerable needle according to the change of force/position. But the difference from Glozman was that its control gain parameters can be adjusted by the model. Compared with traditional PID control, its puncture performance has been greatly improved.
In addition to the control of the position and force of the tail of the flexible steerable needle, special attention should be paid to the rotation control of the tail of the flexible steerable needle. The accuracy of the rotation control of the needle tail largely determines the pros and cons of the needle tip of the flexible steerable needle puncture path. When the flexible steerable needle is punctured, In order to control the needle tip to always stay in the desired plane, Kallem et al. [Citation87] extracted the relevant the part of the system in 2D plane according to the state space equation of the flexible steerable needle bicycle model, and designed a plane maintaining controller. The feedback linearization theory is used to linearize the original planar nonlinear model, and the state observer and controller are designed on this basis. The puncture radius of the wheelbarrow model is usually obtained offline, and this parameter will deviate from the actual puncture radius. In response to this situation, Motaharifar et al. [Citation88] improved it and used an online estimation method for the flexible steerable needle model parameters.
In addition, in the currently published flexible steerable needle remote puncture control methods, few articles consider that the flexible steerable needle was deformed by the force of the tissue during the puncture process. In soft tissue puncture with a flexible steerable needle, the deformation of the needle body was an important factor causing puncture errors. In order to overcome the error caused by deformation, Reed et al. [Citation89] proposed a rotation feedback compensation control strategy based on the torsional deformation model, which maintains the required needle tip angle by compensating the torsional flexibility of the needle shaft, as shown in .
Figure 19. Control block diagram of rotation feedback compensation based on torsion deformation model.
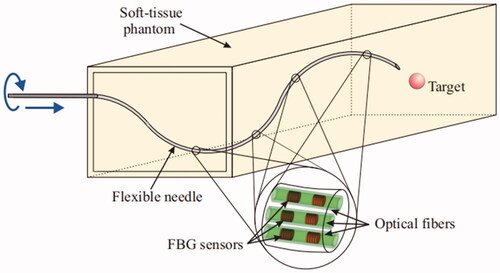
In addition, for the deformation of the soft tissue during the puncture process, Hauser et al. [Citation90] designed a closed-loop controller that uses the model predictive control (MPC) algorithm to calculate the rotation control amount of the needle tail, so that the needle tip advances along the spiral. In the presence of tissue deformation, the closed-loop control reduces the error by 88% compared to the corresponding open-loop control. Rucker et al. [Citation91] designed a sliding mode controller using the motion characteristics of FSNP, and verified that the control method has excellent control accuracy through simulation experiments and in vitro tissue experiments. Abayazid et al. [Citation92] used fiber Bragg grating (FBG) sensors to reconstruct the shape of the needle body of the flexible steerable needle, as shown in , and verified it by visual capture. Applying the reconstructed shape feature to the flexible steerable needle control, when the puncture length reaches 110/mm, the puncture accuracy of this method can reach 1.3 mm.
Figure 20. Model of needle body of flexible steerable needle reconstructed by FBG sensor.
In 2016, the team of Professor Guo Hui [Citation93,Citation94] of Northeastern University proposed a closed-loop control system of flexible steerable needle quadratic optimal control (LQR). First, perform dimensionality reduction and linearization according to the bicycle model theory; Then, in order to solve the problem of inaccurate needle feeding caused by machine system noise and sensor measurement noise, the adaptive colorless Kalman filter algorithm was used to estimate the tip state and the quadratic optimal (LQR) strategy was used for control. This method can effectively accurately control the posture of the needle tip of the flexible steerable needle.
5.2. Autonomous control method
The autonomous control method mainly uses real-time imaging and other technical means, according to a certain control algorithm, to control the robot to independently complete the puncture task of the flexible steerable needle.
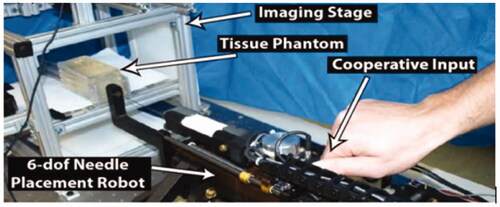
In 2016, Fallahi et al. [Citation95] proposed a nonlinear needle tip attitude observation method based on ultrasound images. The needle tip posture was calculated by the needle rotation speed and the X direction coordinate of the needle tip based on the two-dimensional ultrasound image, and considering the singularity of nonlinear transformation, the convergence of the method is judged by Lyapunov theory. However, this method could only get the pitch angle and the rotation angle, but not the yaw angle, which has limitations. In 2018, Mignon et al. [Citation96] proposed a complete system specifically for robotic guidance of flexible steerable needles under three-dimensional ultrasound imaging. They used sampling consensus algorithm (RANSAC) and dynamic region of interest algorithm (ROI) to track the trajectory of the puncture path. At the same time, they used an ‘echo needle’ needle structure to improve the accuracy of image recognition and the robustness of the system. It had a great effect on precise closed-loop control. However, the structure of the ‘echo needle’ may cause the attenuation of the needle body strength, and a certain probability of needle body damage occurred in the tissue test. In 2018, Carriere et al. [Citation97] proposed an intra-circular surgery system based on an event-triggered controller for automatic needle insertion control and needle offset compensation, which combines needle tip measurement data from ultrasound images to determine the required action sequence To minimize needle deflection. In the same year, they also proposed a control algorithm for a two degree of freedom puncture device mounted on a six degree of freedom manipulator. Used ultrasound images to track artificial targets and electromagnetic trackers to track the position and direction of the needle tip, a closed-loop three-dimensional control was achieved, and force feedback was used to reduce target errors and force applied to the tissue [Citation98]. In the same year, Belbachir et al. [Citation99] proposed a planning algorithm that can calculate the needle placement area that the robot can pierce to the target position in the scanning gantry taking into account the anatomical structure of the lesion. This method used a node addition strategy that combines inverse kinematics, fast collision detection and bidirectional fast random tree search for preoperative planning. In the same year, Wartenberg et al. [Citation100] used medical images for closed-loop guidance compensation, combined with manual coordinated control insertion, to reduce puncture errors. The equipment is shown in . This method had the advantages of robot accuracy and high stability, and at the same time doctors could maintain control of the process at the same time. Compared with pure closed-loop feedback control, the method of manual collaborative control combined with image closed-loop control can maintain the accuracy with feedback and improve the reliability.
Figure 21. Collaborative puncture robot.
6. Controllable flexible needle
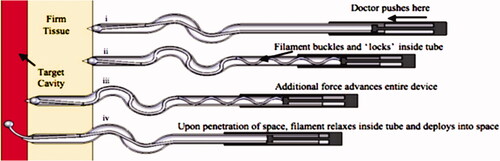
The traditional flexible steerable needle can only change the trajectory direction by adjusting its bevel angle according to the control system, and passively complete the puncture of the target point on the specified path, which is easy to cause puncture deviation. Therefore, some scholars have developed active controllable needles to achieve precise control of the needle trajectory. They mainly include controllable prefabricated flexure needles, programmable bevel needles, flexible steerable needle capable of actuate needle tip, pre-curved coaxial tube needles and Achilles tendon driven continuous manipulators, etc [Citation101–108].
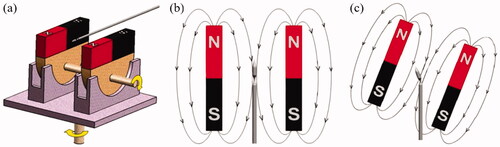
Tang et al. [Citation105] designed a flexible steerable needle with a trapezoidal tip, which could be assisted by the application of an external magnetic field to achieve obstacle avoidance movement and path planning. By selecting the appropriate length and radius combination of the needle, a more stable insertion effect could be achieved, as shown in .
Figure 22. Diagram of magnetic navigation FSNP (a) Device; (b) Process 1; (c) Process 2.
Dupont et al. [Citation104] constructed a new type of controllable needle based on a pre-bent coaxial elastic tube, established a general kinematic model of pipe bending and torsion and corresponding design principles, and controlled the needle tip position by rotating and extending each needle segment posture. The specific schematic process is shown in .
Figure 23. Pre-bent coaxial needle tube.
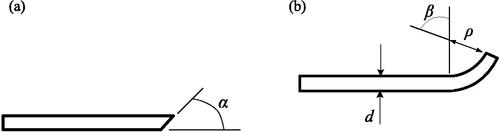
Thomas et al. [Citation106] designed a pre-flexed solid needle to realize the bending control of the needle body, as shown in . The experimental results showed that the pre-bent needle has greater flexibility than the beveled needle and can achieve more complex needle insertion requirements.
Figure 24. Pre-curved solid needle. (a) bevel tip needle; (b) Pre-curved needle.
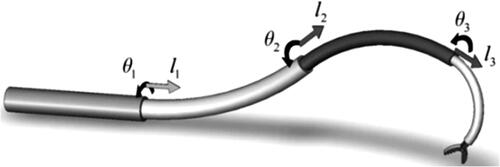
Chen et al. [Citation109] designed a flexible steerable needle with a beveled tip and a more flexible needle body, and proposed a corresponding algorithm to control the needle body path; This kind of flexible needle used structural deformation to transmit and move to achieve large deformed needle trajectory movement, as shown in .
Figure 25. Flexible steerable needle with bevel tip and multiple chain needles.
Bassett et al. [Citation110] designed a needle puncture device based on a mechanical clutch device, and used the drilling rope principle to analyze the puncture movement mechanism of the device, and then conducted an in vitro test on the muscle tissue and performed it on a pig laparoscopic model. The in vivo test had achieved good results, as shown in .
Figure 26. Flexible puncture needle with mechanical clutch device.
At the same time, Zhang Yuchun, Harbin Institute of Technology, et al. [Citation111] proposed a flexible steerable needle with a bevel based on piezoelectric drive, and performed modeling, simulation and experiments.
The above scholars’ research on controllable flexible needles, it is mainly carried out by two aspects of the special structure of the needle body and the corresponding control method, so that the controllable flexible needle can change the path at will according to the wishes of the operator in the soft tissue; Meanwhile, compared with the traditional flexible steerable needle, the path change can be completed in a shorter puncture distance, and the operation is more flexible and diverse. Since controllable flexible needles also have shortcomings such as difficulty in manufacturing and easy failure; so, the current research on controllable flexible needles is still in theory, but this technology will definitely become a new trend in the field of FSNP.
7. Current problems and development trends
In summary, the path planning of the flexible steerable needle was still in the stage of theoretical simulation research, and the theoretical research was not perfect, and there was still a certain distance from clinical application or experimental application. However, it could be known from the above analysis that FSNP robot could realize free and flexible movement through motion path planning and related control methods when puncturing soft tissues. Compared with a conventional needle puncture robot, it can overcome obstacles such as bones, nerves and blood vessels that cannot be bypassed during the puncture process, and complete and achieve the purpose of targeted puncture of deep parts of the human body. So, the flexible steerable needle soft tissue puncture robot and its technology will be an important development direction in the field of minimally invasive interventional therapy in the future.
7.1. Currently existing problems
The current problems are summarized as follows:
All planning algorithms must be based on kinematic models or finite element models, however, there is no model that can meet the actual surgical needs, which has become a bottleneck problem in the practical application of path planning.
Most of the various control methods of the flexible steerable needles are based on improved path planning, and the theoretical research is not perfect. Most of them have not considered the position optimization of the needles, and there is a lack of analysis of many practical factors in the path planning.
The control strategy of the flexible steerable needle insertion system lacks accurate planning before operation and real-time planning during operation, so real-time, comprehensive planning algorithm with multiple control methods will be the key issue of future research.
7.2. Development trend
FSNP surgical robot, as an emerging research direction that integrates mechanics, electronics, computer image processing, artificial intelligence and medicine, has become a huge driving force for the development of modern minimally invasive surgery, so that minimally invasive surgery toward precision, intelligent direction of development.
The miniaturization and light weight of FSNP robot is its future development trend. On the basis of maintaining a larger movement space, it has better rigidity and higher motion resolution to meet the needs of minimally invasive interventional surgery.
With the rapid development of high-speed remote communication technology, holographic imaging technology, new electronic technology and computer multimedia technology, this will make the telemedicine technology of FSNP surgical robots become its future development trend.
Meanwhile, FSNP surgical robots mainly perform surgical operations based on image information feedback such as ultrasound, MRI, and CT, and this will leads to feedback information is single and cannot obtain the same on-site feeling and experience as open surgery. With the development of sensor technology, medical image information technology, and virtual reality technology and augmented reality technology, FSNP technology based on the multi-sensing information and the augmented reality for human-computer interaction control has become a future development trend, enabling the operator to obtain clinical surgical vision, force, touch and other information, and it enhances the doctor’s sense of presence during the operation. The fusion of multi-sensory information technology and augmented reality technology are conducive to the accurate judgment of doctors’ operations and more suitable for the intelligent development of minimally invasive interventional surgery based on flexible steerable needles in the future.
In addition, the intelligent control technology of minimally invasive interventional surgical robots based on flexible steerable needles is also its future development trend, the related technologies that it can combine mainly include: automatic tracking technology of surgical instruments based on visual information, organ motion tracking and compensation technology based on machine learning and data-driven, automatic navigation based on virtual guidance and safety assurance technology. The above technologies can improve the intelligence of minimally invasive surgical robots, further improve the effectiveness and safety of robotic minimally invasive surgical operations, and minimize the labor intensity of operators.
8. Conclusions and outlook
This article reviews the development status of FSNP surgical robots, combined with the principle of FSNP, focuses on FSNP path planning, navigation and positioning control of the needle tip of the flexible steerable needle, flexible steerable needle system puncture control methods, and controllable flexible needles. At the same time, this article had the following conclusions:
The emergence and development of FSNP robots originated from clinical needs. Most of the prostate puncture robots are in the research and development stage, and their effectiveness and safety need to be further improved. Therefore, there are still some urgent problems in the development of clinical surgery.
The research of FSNP control strategy is a complex problem of multi-discipline, each research direction is not perfect, and they are interrelated and restrict each other. The control path planning of the flexible steerable needle is the premise and foundation in the research of the flexible steerable needle control system, and it plays a very important role in the development and application of the flexible steerable needle. Therefore, the research of flexible steerable needle control path planning has high research value and broad research space.
With the continuous development of science and technology, the needle tip puncture positioning of the flexible steerable needle should make full use of the advantages of various image navigation methods to fuze X-ray, B-mode ultrasound, computed tomography (CT), and magnetic resonance imaging (MRI) The algorithm is further studied to make the operation process more convenient and accurate, and shorten the operation time.
In terms of the needle tail motion control of the flexible steerable needle minimally invasive interventional surgery robot, the PID control algorithm based on the traditional rigid robot cannot meet the high-precision and stable control requirements of the minimally invasive surgical robot. A real-time execution characteristic control algorithm with rolling optimization, feedback correction, constraint processing and combined computing image processing should be designed, and it will be widely studied and applied in the field of FSNP control.
The controllable flexible needle has always attracted attention due to its high control flexibility and convenience. In recent years, research on controllable flexible needles is currently in the stage of theoretical simulation and experimental research. Therefore, the controllable flexible needle with exquisite design structure, precise movement, high safety, flexible operation and real-time control planning is also the focus of future work.
In addition, in the research of flexible steerable needle control strategy, the following work should also be considered: First, Research on kinematic model and parameter identification of FSNP of 3D soft tissue, and path planning under obstacle environment; Second, Conduct theoretical and experimental research on uneven and anisotropic soft tissues, and further revise related theories; Third, Conduct related researches on the interaction force and deformation coupling mechanism of flexible steerable needles and soft tissues, including research on the biomechanical properties of human tissues; Last, Conduct research on flexible steerable needle image navigation system, including research on image recognition and control strategy.
At present, researches on FSNP robots and related technologies are constantly developing, but they lack depth in many aspects. Therefore, this also requires scientific researchers and people interested in FSNP to make greater efforts and more research to promote the early realization of large-scale applications of FSNP technology.
Author contributions
Investigation, Bing Li; resources, Yongde Zhang; data curation, Bing Li and Xuesong Dai; supervision, Yongde Zhang; writing—original draft preparation, Bing Li; writing—review and editing, Bing Li.
Disclosure statement
No potential conflict of interest was reported by the author(s).
Additional information
Funding
References
- Zhao Y. Research on kinematic modeling and puncture path planning of flexible needle [Ph.D. thesis]. Harbin, China: Harbin University of Science and Technology; 2012.
- Kong D. Research on path planning methods of flexible needle puncture system [M.S. thesis]. Shenyang, China: Northeastern University; 2014.
- Zhang B. Toward robotic puncture based on flexible bevel-tip needle insertion [Ph.D. thesis]. Harbin, China: Harbin Institute of Technology; 2018.
- Tang L, Chen Y, He X. Magnetic force aided compliant needle navigation and needle performance analysis. IEEE International Conference on Robotics and Biomimetics; 2008 May; Sanya, China. p. 612–616.
- Ko S, Davies B, Rodriguez Y. Two-dimensional needle steering with a “programmable bevel” inspired by nature: modeling preliminaries. IEEE/RSJ International Conference on Intelligent Robots and Systems; Nov 2010; Taiwan, China. p. 2319–2324.
- Wang Y, Liu C, Chen Y, et al. Study on one-direction bendable articulated needle. 3rd International Conference on Biomedical Engineering and Informatics; Nov 2010; Yantai, China. p. 2114–2117.
- Wedlick T, Okamura A. Characterization of pre-curved needles for steering in tissue. 31st Annual International Conference of the IEEE Engineering in Medicine and Biology Society; Sept 2009; Minneapolis, MN. p. 1200–1203.
- Majewicz A, Wedlick T, Reed K, et al. Evaluation of robotic needle steering inex vivo tissue. IEEE International Conference on Robotics and Automation; May 2010; Anchorage, AK. p. 2068–2073.
- Webster R, Kim J, Cowan N, et al. Nonholonomic modeling of needle steering. Int J Robot Res. 2006;25:509–525.
- Webster R, Memisevic J, Okamura A. Design considerations for robotic needle steering. In: Institute of Electrical and Electronics Engineers Lnc. 2005. p. 3588–3594.
- Zhang Y, Zhao Y, Tu F, et al. A review on path planning of flexible needle. J Harbin Univ Sci Technol. 2011;16:7–11.
- Liu W, Yang Z, Li P, et al. Mechanics of tissue rupture during needle insertion in transverse isotropic soft tissue. Med Biol Eng Comput. 2019;57(6):1353–1366.
- Adagolodjo Y, Goffin L, Mathelin M, et al. Robotic insertion of flexible needle in deformable structures using inverse Finite-Element simulation. IEEE Trans Robot. 2019;35(3):697–708.
- Fu J, Gao D, Zhao M, et al. Simulation of coupling process of flexible needle insertion into soft tissue based on ABAQUS. J Qinghai Univ. 2019;37:61–67.
- Sedeh S, Ahmadian T, Janabi F. Modeling, simulation, and optimal initiation planning for needle insertion into the liver. J Biomech Eng. 2010;132(4):1–11.
- Zhang J, Zhong Y, Gu C. Deformable models for surgical simulation: a survey. IEEE Rev Biomed Eng. 2018;11:143–164.
- Zhu Z, Li H. The human soft tissue hyper viscoelastic biological model and puncture simulation in virtual surgery. Chin J Appl Mech. 2019;36:304–309.
- Zhao Y, Fang Y, Zhang Y, et al. Study on bending modeling of cannula flexible needle inserting into soft tissue based on finite element method. Chin J Sci Instrum. 2020;41:202–211.
- Alterovitz R, Goldberg K, Okamura A. Planning for steerable bevel-tip needle insertion through 2D soft tissue with obstacles. Proceedings of the 2005 IEEE International Conference on Robotics and Automation; Barcelona, Spain. 2005. p. 1640–1645.
- Alterovitz R, Lim A, Goldberg K, et al. Steering flexible needles under Markov Motion Uncertainty. IEEE/RSJ International Conference on Intelligent Robots and Systems; 2005; Edmonton, Canada. p. 120–125.
- Alterovitz R, Branicky M, Goldberg K. Motion planning under uncertainty for Image-Guided medical needle steering. Int J Rob Res. 2008;27(11–12):1361–1374.
- Wooram P, Jin S, Yu Z, et al. Diffusion-based motion planning for a nonholonomic flexible needle model. IEEE International Conference on Robotics and Automation; 2005; Barcelona, Spain. p. 4600–4605.
- Park W, Liu Y, Zhou Y, et al. Kinematic state estimation and motion planning for stochastic nonholonomic systems using the exponential map. Robotica. 2008;26:419–434.
- Park W, Wang Y, Chirikjian G. Path planning for flexible needles using second order error propagation. Springer Tracts Adv Robot. 2010;57:583–595.
- Park W, Wang Y, Chirikjian G. The path-of-probability algorithm for steering and feedback control of flexible needles. Int J Rob Res. 2010;29:813–830.
- Duindam V, Alterovitz R, Sastry S, et al. Screw-Based motion planning for Bevel-Tip flexible needles in 3D environments with obstacles. IEEE International Conference on Robotics and Automation; May 19–23; Pasadena, CA: Institute of Electrical and Electronics Engineers Inc; 2008. p. 2483–2488.
- Sadati N, Torabi M. Adaptive 2D-path optimization of steerable bevel-tip needles in uncertain model of brain tissue. World Congress on Computer Science and Information Engineering. IEEE Computer Society; 2009. p. 254–260.
- Zhang Y, Zhao Y, Chen H. 2D planning of bevel tip flexible needle in soft tissue. Robot. 2011;33:750–757.
- Zhao Y, Zhang Y, Tu F. Reverse path planning for flexible needle in 2D soft tissue with obstacles. 2nd International Conference on Frontiers of Manufacturing and Design Science; Taichung, Taiwan, China; 2011. p. 4132–4137.
- Lee J, Park W. A Probability-Based path planning method using fuzzy logic. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2014); Sep 14–18; Chicago, IL: Institute of Electrical and Electronics Engineers Inc; 2014. p. 2978–2984.
- Lee J, Park W. Insertion planning for steerable flexible needles reaching multiple planar targets. New Horizon. 2015;40:2377–2383.
- Bobrenkov O, Lee J, Park W. A new Geometry-Based plan for inserting flexible needles to reach multiple targets. Robotica. 2014;32(6):985–1004.
- Sun W, Alterovitz R. Motion planning under uncertainty for medical needle steering using optimization in belief space. IEEE International Conference on Robotics and Automation; 2014; Hongkong, China.
- Huo B, Zhao X, Han J, Xu , et al. Path-tracking control of bevel-tip needles using model predictive control. IEEE 14th International Workshop on Advanced Motion Control; 2016; Auckland, New Zealand. p. 197–202.
- Tan X, Yu P, Lim K, et al. Robust path planning for flexible needle insertion using markov decision processes. Int J Cars. 2018;13(9):1439–1451.
- Xu J, Duindam V, Alterovitz R, et al. Motion planning for steerable needles in 3D environments with obstacles using rapidly-exploring random trees and backchaining. 4th IEEE Conference on Automation Science and Engineering; 2008; Washington, DC. p. 41–46.
- Xu J, Duindam V, Alterovitz R, et al. Planning fireworks trajectories for steerable medical needles to reduce patient trauma. IEEE/RSJ International Conference on Intelligent Robots and Systems; 2009; St. Louis, MO. p. 4517–4522.
- Sadati N, Torabi M, Vaziri R, et al. Soft-tissue modeling and image-guided control of steerable needles. 31st Annual International Conference of the IEEE Engineering in Medicine and Biology Society: Engineering the Future of Biomedicine; 2009; Minneapolis, MN. p. 5122–5125.
- Patil S, Alterovitz R. Interactive motion planning for steerable needles in 3D environments with obstacles. 3rd IEEE RAS and EMBS International Conference on Biomedical Robotics and Biomechatronics; 2010; Tokyo, Japan. p. 893–899.
- Patil S, Burgner J, Webster R, et al. Needle steering in 3-D via rapid replanning. IEEE Trans Robot. 2014;30(4):853–864.
- Alterovitz R, Patil S, Derbakova A. Rapidly-exploring roadmaps: weighing exploration vs. refinement in optimal motion planning. Proceedings under IEEE International Conference on Robotics and Automation; 2011; Shanghai, China. p. 3706–3716.
- Caborni C, Ko S, De M, et al. Risk-based path planning for a steerable flexible probe for neurosurgical intervention. IEEE RAS & EMBS International Conference on Biomedical Robotics and Biomechatronics; 2012; Rome, Italy. p. 866–871.
- Bernardes M, Adorno B, Poignet P, et al. Robot-assisted automatic insertion of steerable needles with Closed-Loop imaging feedback and intraoperative trajectory replanning. Mechatronics. 2013;23(6):630–645.
- Bernardes M, Adorno B, Borges G, et al. 3D robust online motion planning for steerable needles in dynamic workspaces using Duty-Cycled rotation. J Control Autom Electr Syst. 2014;25(2):216–227.
- Moreira P, Patil S, Alterovtiz R. Needle steering in biological tissue using ultrasound-based online curvature estimation. 2014 IEEE International Conference on Robotics and Automation; 2014; Hongkong, China. p. 4368–4373.
- Gustaaf J, Abayazid M. Needle path planning and steering in a three-dimensional non-static environment using two-dimensional ultrasound images. Int J Robot Res. 2014;33:1361–1374.
- Xiong J, Li X, Gan Y, et al. Path planning for flexible needle insertion system based on improved rapidly-exploring random tree algorithm. IEEE International Conference on Information and Automation; 2015; Lijiang, China. p. 1545–1550.
- Huang C, Lei Y. Novel model-based path planning method for robot-assisted flexible needle insertion. 13th IEEE Conference on Automation Science and Engineering; 2017; Xian, China. p. 1414–1419.
- Fauser J, Sakas G, Mukhopadhyay A. Planning nonlinear access paths for temporal bone surgery. Int J Comput Assist Radiol Surg. 2018;13(5):637–646.
- Li X, Li P, Xiong J. Path planning for flexible needle based on environment properties and random method. Comput Eng Appl. 2017;53:121–125.
- Duindam V, Xu J, Alterovitz R, et al. 3D motion planning algorithms for steerable needles using inverse kinematics. 8th International Workshop on the Algorithmic Foundations of Robotics; 2008; Guanajuato, Mexico. p. 535–549.
- Wang J, Sun D, Zheng J, et al. Optimal path planning for inserting a steerable needle into tissue. IEEE International Conference on Information and Automation; 2011; Shenzhen, China. p. 39–44.
- Wang J, Li X, Zheng J, et al. Dynamic path planning for inserting a steerable needle into a soft tissue. IEEE/ASME Trans Mechatron. 2014;19(2):549–558.
- Jiang S, Liu X, Bai S, et al. The potential field-based trajectory planning of needle invasion in soft tissue. Journal of Biomedical Engingeering. 2010;27:790–794. Aug,
- Hu X, Zeng C. Obstacle avoidance and path planning for automatic needle puncturing. Academic conference on image graphics technology and applications; 2010; BeiJing, China.
- Li Z, Kang J, Zhan J. Path planning of flexible needles in the environment with obstacles. J Donghua Univ (Nat Sci). 2015;41:130–134.
- Khosrosereshki F, Rasouli F. Path planning for insertion of a bevel tip steerable needle into a soft tissue in the presence of obstacles. 22nd Iranian Conference on Electrical Engineering Tehran; 2014; Tehran, Iran. p. 1348–1353.
- Li P, Jiang S, Yang J. A combination method of artificial potential field and improved conjugate gradient for trajectory planning for needle insertion into soft tissue. J Med Biol Eng. 2014;34(2):178–573.
- Li P, Jiang S, Liang D, et al. Modeling of path planning and needle steering with path tracking in anatomical soft tissues for minimally invasive surgery. Med Eng Phys. 2017;41:35–45.
- Hamze N, Peterlik L, Cotin S, et al. Preoperative trajectory planning for percutaneous procedures in deformable environments. Comput Med Imaging Graph. 2016;47:16–28.
- Rossa C, Lehmann T, Sloboda R, Usmani , et al. A data-driven soft sensor for needle deflection in heterogeneous tissue using just-in-time modeling. Med Biol Eng Comput. 2017;55(8):1401–1414. Aug.
- Haddadi A, Hashtrudi-Zaad K. Development of a dynamic model for bevel-tip flexible needle insertion into soft tissues. Engineering in Medicine and Biology Society, EMBC, 2011. Annual International Conference of the IEEE, Aug, 2011. p. 7478–7482.
- Hing J, Brooks A, Desai J. A biplanar fluoroscopic approach for the measurement, modeling, and simulation of needle and Soft-Tissue interaction. Med Image Anal. 2007;11(1):62–78.
- Glozman D, Shoham M. Image-guided robotic flexible needle steering. IEEE Trans Robot. 2007;23(3):459–467.
- Fichtinger G, Deguet A, Masamune K, et al. Image overlay guidance for needle insertion in Ct scanner. IEEE Trans Biomed Eng. 2005;52(8):1415–1424.
- Krieger A, Song S, Cho N, et al. Development and evaluation of an actuated Mri-compatible robotic system for Mri-guided prostate intervention. IEEE ASME Trans Mechatron. 2012;18(1):273–284.
- Krieger A, Susil R, Menard C, et al. Design of a novel MRI compatible manipulator for image guided prostate interventions. IEEE Trans Biomed Eng. 2005;52(2):306–313.
- Tadayyon H, Lasso A, Kaushal A, et al. Target motion tracking in MRI-Guided transrectal robotic prostate biopsy. IEEE Trans Biomed Eng. 2011;58(11):3135–3142.
- Moreira P, Boskma K, Misra S. Towards MRI-guided flexible needle steering using Fiber Bragg grating-based tip tracking. 2017 IEEE International Conference on Robotics and Automation; 2017; Macau, China. p. 4849–4854.
- Aboofazeli M, Abolmaesumi P, Mousavi P. A new scheme for curved needle segmentation in three-dimensional ultrasound images. IEEE International Conference on Symposium on Biomedical Imaging: from Nano to Macro. IEEE Press; 2009.
- Zhu M, Salcudean S. Real-time image-based B-mode ultrasound image simulation of needles using tensor-product interpolation. IEEE Trans Med Imaging. 2011;30(7):1391–1400.
- Boctor E, Choti M, Burdette E, et al. Three-dimensional ultrasound-guided robotic needle placement: an experimental evaluation. Int J Med Robot. 2008;4(2):180–191.
- Neubach Z, Shoham M. Ultrasound-guided robot for flexible needle steering. IEEE Trans Biomed Eng. 2010;57(4):799–805.
- Neshat H, Patel R. Real-time parametric curved needle segmentation in 3D ultrasound images. Biomedical Robotics and Biomechatronics, 2008. BioRob 2008. 2nd IEEE RAS & EMBS International Conference on IEEE, 2008.
- Zhang R, Chen S, Ou J, et al. X-ray guided lumbar facet joint intra-articular injection for lumbar facet joint osteoarthritis. Clin Med Eng. 2009;16:16–18.
- Bossi R, Shepherd W. X-Ray computed tomography for failure analysis investigations. Opt Express. 2021;29(2).
- Tang H. Risk factors of infection after transrectal ultrasound-guided prostate puncture [MD thesis]. The First Affiliated Hospital of Zhengzhou University, Zhengzhou, China, June 2020.
- Zhai Z, Zhong G, Yang L, et al. Comparison of ultrasound-guided transrectal and transperineal prostate biopsy. Chin J Min Inv Surg. 2020;20:405–408.
- Pang H, Dong Y. The value of transrectal ultrasound-guided prostate biopsy combined with prostate antigen in the diagnosis of prostate cancer. Clin Res. 2021;29:132–134.
- Huo X, Yang S, Guo Z. The clinical application study of low-dose CT-guided thoracic puncture biopsy. J Med Imaging. 2020;12:2228–2231.
- Yang C, Wu Y, Hu Y, et al. Application of bipolar laser positioning navigator in CT-guided percutaneous transthoracic needle biopsy for lung cancer. Chin Clin Oncol. 2020;25:1116–1120.
- Bi J. Research on key technologies of MRI-US image fusion navigation for prostate intervention [Ph.D. thesis]. Harbin University of Science and Technology, Harbin, China; 2019.
- Shu Y. MRI-TRUS cognitive fusion-guided biopsy for the diagnosis of prostate cancer [M. D. thesis]. Shandong University, JiNan, China; 2019.
- Jia X. Research on Key Technology of MRI-compatible breast biopsy robot based on double tendon-sheath coupling transmission [Ph.D. thesis]. Harbin University of Science and Technology, Harbin, China; 2020.
- Romano J, Webster R, Okamura A. Teleoperation of steerable needles. Robotics and automation, 2007 IEEE International Conference on, 2007. p. 934–939.
- Duchemin G, Maillet P, Poignet P, et al. A hybrid position/force control approach for identification of deformation models of skin and underlying tissues. IEEE Trans Biomed Eng. 2005;52(2):160–170.
- Kallem V, Cowan N. Image guidance of flexible tip-steerable needles. IEEE Trans Robot. 2009;25(1):191–196.
- Motaharifar M, Talebi H, Afshar A, et al. Adaptive observer-based controller design for a class of nonlinear systems with application to image guided control of steerable needles. Proceedings of the American Control Conference; Jun 2012. p. 4849–4854.
- Reed K, Kallem V, Alterovitzt R, et al. Integrated planning and image-guided control for planar needle steering. IEEE Computer Society; 2008. p. 819–824.
- Hauser K, Alterovitz R, Chentanez N, et al. Feedback control for steering needles through 3D deformable tissue using helical paths. Robot Sci Syst. 2009;28.
- Rucker D, Das J, Gilbert H, et al. Sliding mode control of steerable needles. IEEE Trans Robot. 2013;29(5):1289–1299.
- Abayazid M, Kemp M, Misra S. 3D flexible needle steering in soft-tissue phantoms using fiber bragg grating sensors. Institute of Electrical and Electronics Engineers Inc; May 2013. p. 5846–5849.
- Zhao X, Guo H, Ye D, et al. Comparison of estimation and control methods for flexible needle in 2D. In Proceedings of the 28th Chinese Control and Decision Conference. IEEE, 2016. p. 5444–5449.
- Hui G. Control methods and experiment of flexible needle puncture in the soft tissue [Ph.D. thesis]. Northeastern University, China; 2016.
- Fallahi B, Rossa C. Partial estimation of needle tip orientation in generalized coordinates in ultrasound image-guided needle insertion. IEEE International Conference on Advanced Intelligent Mechatronics; 2016; Banff, Canada. p. 1604–1609.
- Mignon P, Philippe P, Jocelyne T. Automatic robotic steering of flexible needles from 3D ultrasound images in phantoms and ex vivo biological tissue. Ann Biomed Eng. 2018;46(9):1385–1396.
- Hauser K, Alterovitz R, Chentanez N, et al. Event-triggered 3D needle control using a Reduced-Order computationally efficient bicycle model in a constrained optimization framework. J Med Robot Res. 2018;4:184–186.
- Chevrie J, Shahriari N, Babel M, et al. Flexible needle steering in moving biological tissue with motion compensation using ultrasound and force feedback. IEEE Robot Autom Lett. 2018;3(3):2338–2345.
- Belbachir E, Golkar E, Bayle B, et al. Automatic planning of needle placement for Robot-Assisted percutaneous procedures. Int J Comput Assist Radiol Surg. 2018;13(9):1429–1438.
- Wartenberg M, Schornak J, Gandomi K, et al. Closed-Loop active compensation for needle deflection and target shift during cooperatively controlled robotic needle insertion. Ann Biomed Eng. 2018;46(10):1582–1594.
- Misra S, Reed K, Schafer B, et al. Observations and models for needle-tissue interactions. Institute of Electrical and Electronics Engineers Inc; May 2009. p. 2687–2692.
- Ko S, Frasson L, Baena F. Closed-Loop planar motion control of a steerable probe with a “programmable bevel” inspired by nature. IEEE Trans Robot. 2011;27(5):970–983.
- Roesthuis R, Van N, Van J, et al. Modeling and steering of a novel actuated-tip needle through a soft-tissue simulant using Fiber Bragg Grating sensors. Institute of Electrical and Electronics Engineers Inc; Jun 2015. 29, 2283–2289.
- Dupont P, Lock J, Itkowitz B, et al. Design and control of concentric-tube robots. IEEE Trans Robot. 2010;26(2):209–225.
- Tang L, Chen Y, He X. Magnetic force aided compliant needle navigation and needle performance analysis. IEEE Computer Society; Dec 2007. p. 612–616.
- Wedlick T, Okamura M. Characterization of pre-curved needles for steering in tissue. IEEE Computer Society. Sept 2009; p. 1200–1203.
- Webster R, Jones B. Design and kinematic modeling of constant curvature continuum robots: a review. Int J Robot Res. 2010;29(13):1661–1683.8.
- Camarillo DB, Milne CF, Carlson CR, et al. Mechanics modeling of tendon driven continuum manipulators. IEEE Trans Robot. 2008;24(6):1262–1273.
- Chen Z, Chen Y. Analysis of multi-hinge compliant needle insertion. IEEE International Conference on Virtual Environments. IEEE, 2009. p. 314–318.
- Bassett E, Slocum H, Masiakos P. Design of a mechanical clutch based needle-insertion device. Proceedings of the National Academy of Sciences, 2009. 106, p. 5540–5545.
- Wang L. Design of novel tip needle and research on its trajectory planning [M.S. thesis]. Harbin Institute of Technology, Harbin, China; 2013.